伊莱斯ES1系列交流伺服驱动器使用说明书(V2.00版本)
- 格式:pdf
- 大小:23.89 MB
- 文档页数:45
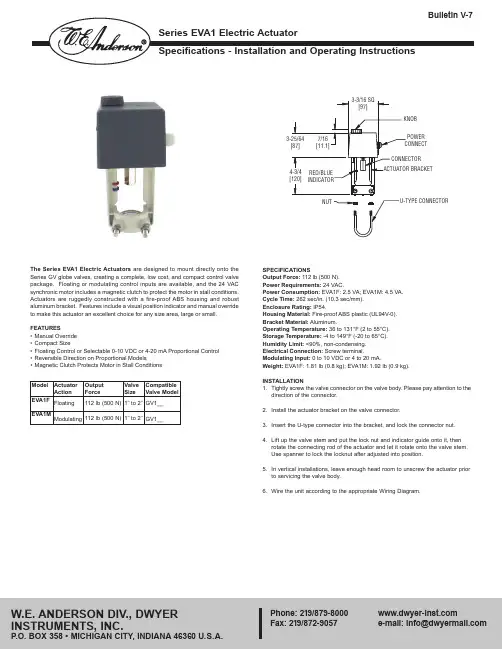
The Series EVA1 Electric Actuators are designed to mount directly onto the Series GV globe valves, creating a complete, low cost, and compact control valve package. Floating or modulating control inputs are available, and the 24 VAC synchronic motor includes a magnetic clutch to protect the motor in stall conditions. Actuators are ruggedly constructed with a fire-proof ABS housing and robust aluminum bracket. Features include a visual position indicator and manual override to make this actuator an excellent choice for any size area, large or small. FEATuRES•Manual Override• Compact Size• Floating Control or Selectable 0-10 VDC or 4-20 mA Proportional Control• Reversible Direction on Proportional Models• Magnetic Clutch Protects Motor in Stall Conditions SPECIFICATIONSOutput Force:112 lb (500 N).Power Requirements:24 VAC.Power Consumption:EVA1F: 2.5 VA; EVA1M: 4.5 VA.Cycle Time:262 sec/in. (10.3 sec/mm).Enclosure Rating:IP54.Housing Material:Fire-proof ABS plastic (UL94V-0).Bracket Material:Aluminum.Operating Temperature:36 to 131°F (2 to 55°C).Storage Temperature:-4 to 149°F (-20 to 65°C).Humidity Limit:<90%, non-condensing.Electrical Connection:Screw terminal.Modulating Input:0 to 10 VDC or 4 to 20 mA.Weight: EVA1F: 1.81 lb (0.8 kg); EVA1M: 1.92 lb (0.9 kg).INSTALLATION1.Tightly screw the valve connector on the valve body. Please pay attention to thedirection of the connector.2. Install the actuator bracket on the valve connector.3. Insert the U-type connector into the bracket, and lock the connector nut.4. Lift up the valve stem and put the lock nut and indicator guide onto it, thenrotate the connecting rod of the actuator and let it rotate onto the valve stem.Use spanner to lock the locknut after adjusted into position.5. In vertical installations, leave enough head room to unscrew the actuator priorto servicing the valve body.6. Wire the unit according to the appropriate Wiring Diagram.©Copyright 2014 Dwyer Instruments, Inc.Printed in U.S.A. 9/14FR# R3-443386-00 Rev. 1Note:Actuator must be protected from dripping water. Damage to internal elements and motor may occur. Do not cover actuator with material that does not permit heat exchange.EVA1M WIRING DIAGRAMOPERATION1.The actuator is driven by a reversible synchronous motor with a magneticclutch. The motor can provide stable torsion at stopping conditions due to the magnetic force created by the motor rotor and the magnetic clutch. When power is taken away, the motor will stop at its current position. 2.The signal of the proportional type actuator controls the clockwise or counter-clockwise rotation of the motor.3. EVA1M actuators can be jumper selected for 0.51, 0.59, 0.67 or 0.75 inch valvestrokes. Factory stroke setting is 0.75˝.4. The input control signal is jumper selectable between 0-10V or 4-20 mA DC.Factory setting is 0-10V DC input mode.5. Direct (DA) or Reverse (RA) direction operation is also jumper selectable. Thetwo states are opposite of each other.EVA1M PCB SETTING DIAGRAMEVA1F WIRING DIAGRAMTERMINALS 1-21-3ACTuATOR RODDOWN EXTEND UP CONTRACT MAINTENANCEThe Series EVA1 Electric Actuator is not field serviceable and should be returned if repair is needed (field repair should not be attempted and may void warranty).Make sure to cut off power supply when disconnecting the actuator from the valve.Contact customer service to receive a return goods authorization number before shipping. Be sure to include a brief description of the problem plus any relevant application notes.。
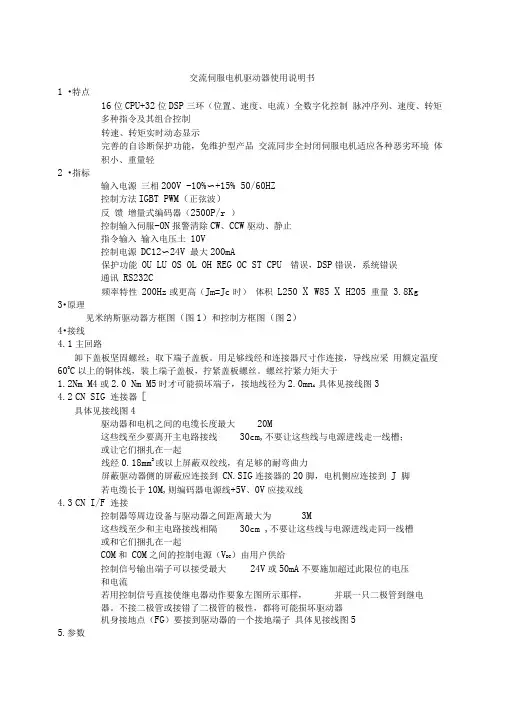
交流伺服电机驱动器使用说明书1 •特点16位CPU+32位DSP三环(位置、速度、电流)全数字化控制脉冲序列、速度、转矩多种指令及其组合控制转速、转矩实时动态显示完善的自诊断保护功能,免维护型产品交流同步全封闭伺服电机适应各种恶劣环境体积小、重量轻2 •指标输入电源三相200V -10%〜+15% 50/60HZ控制方法IGBT PWM(正弦波)反馈增量式编码器(2500P/r )控制输入伺服-ON报警清除CW、CCW驱动、静止指令输入输入电压土10V控制电源DC12〜24V 最大200mA保护功能OU LU OS OL OH REG OC ST CPU 错误,DSP错误,系统错误通讯RS232C频率特性200Hz或更高(Jm=Jc时)体积L250 X W85 X H205 重量3.8Kg 3•原理见米纳斯驱动器方框图(图1)和控制方框图(图2)4•接线4.1主回路卸下盖板坚固螺丝;取下端子盖板。
用足够线经和连接器尺寸作连接,导线应采用额定温度600C以上的铜体线,装上端子盖板,拧紧盖板螺丝。
螺丝拧紧力矩大于1.2Nm M4或2.0 Nm M5时才可能损坏端子,接地线径为2.0mn i 具体见接线图34.2CN SIG 连接器[具体见接线图4驱动器和电机之间的电缆长度最大20M这些线至少要离开主电路接线30cm,不要让这些线与电源进线走一线槽;或让它们捆扎在一起线经0.18mm2或以上屏蔽双绞线,有足够的耐弯曲力屏蔽驱动器侧的屏蔽应连接到CN.SIG连接器的20脚,电机侧应连接到J 脚若电缆长于10M,则编码器电源线+5V、0V应接双线4.3CN I/F 连接控制器等周边设备与驱动器之间距离最大为3M这些线至少和主电路接线相隔30cm ,不要让这些线与电源进线走同一线槽或和它们捆扎在一起COM和COM之间的控制电源(V DC)由用户供给控制信号输出端子可以接受最大24V或50mA不要施加超过此限位的电压和电流若用控制信号直接使继电器动作要象左图所示那样,并联一只二极管到继电器。

ENC-1S型单轴电机控制系统操 作 手 册1 概述:ENC-1S型单轴电机控制系统是一种适用于单坐标点位控制的通用型控制系统,控制对象为步进电机或数字式交流伺服电机,及16点开关量输入输出。
本机显示采用中文方式,操作界面友好、简单。
为了能够正确地使用本系统,请操作人员认真阅读本说明书。
2系统操作面板系统操作面板是人机对话的界面,使用者用键盘向系统输入程序和命令,系统通过LCD显示屏对人们的指令作出反应。
2.1 显示窗口显示窗口是一面192*64点阵的图形液晶屏,示意如下:图2:ENC-1S型单轴电机控制系统的显示屏显示窗口可以显示4排文字,每排12个汉字或16个ASCII字符。
显示窗口在不同的操作状态下显示不同的系统资讯,具体情况稍后再叙。
2.2 系统按键说明:数控系统是通过键盘来识别操作者的命令的。
操作者须使用系统面板上的按键来将加工程序逐个字符地输入数控系统内部的存储器,并且能够进行检查、插入、删除等编辑操作。
序号 键 名 功 能 属 性1 P工件号 字母2 N/0 程序段号标识 / 数字0 字母/数字3 G/1 准备功能标识 / 数字1 字母/数字4 X/2 直线绝对坐标标识 / 数字2 字母/数字5 U/3 直线相对坐标标识 / 数字3 字母/数字6 C/4 旋转坐标标识 / 数字4 字母/数字7 I/5 辅助坐标标识 / 数字5 字母/数字8 F/6 速度及延时标识 / 数字6 字母/数字9 S/7 模拟输出标识 / 数字7 字母/数字10 M/8 辅助功能标识 / 数字8 字母/数字11 L/9 跳转及循环标识/数字9字母/数字12 ±/. 正负号 / 小数点 符号13 ESC 退出,取消编辑14 RTN 回车键,完成一项输入 编辑15 参数 设置系统参数 编辑16 ↑ X负向运动 编辑/控制17 ↓ X正向运动 编辑/控制18 ← 修改选项 编辑19 → 修改选项 编辑20 启动 开始加工程序运行 控制21 停止 暂停电机运行 控制22 功放 电机驱动使能控制 控制23 回零 返回程序起点 控制24 原点 返回机械参考点 控制25 主轴 发出主轴启停信号 控制26 RES 系统初始化 控制图3: ENC-1S单轴电机控制系统的键盘定义3 系统的编程操作为将在纸面上编好的程序输入系统存储器,以及进行必要的检查、修改,需通过一系列的按键操作来实现。

目录第一章功能概述 (3)1.1伺服驱动器型号说明 (3)1.2伺服电机型号说明 (3)1.4E系列伺服器尺寸 (4)1.5伺服驱动器的安装 (4)1.6SE系列伺服驱动器基本功能 (6)第二章接线 (7)2.1接线说明及注意事项 (7)2.2SE系列接线端子简介 (7)2.2.1SE系列伺服器主接线图 (7)2.3电机动力线和编码器线的配线 (9)2.3.16芯塑料头电机接线 (9)2.3.29芯塑料头电机接线 (10)2.3.3数字排序航空插头电机接线 (11)2.3.4字母排序航空插头电机接线 (12)2.4控制接口X4的定义(从插头焊锡侧看) (13)第三章显示与操作 (14)3.1前面板的使用方法 (14)3.1.1面板及其操作说明 (14)第一章功能概述1.1伺服驱动器型号说明(1)F系列伺服驱动器命名方式:1.2伺服电机型号说明通用型伺服电机命名方式:转速代码含义101000rpm 151500rpm 202000rpm 303000rpm 其他代码*100系列代码含义CSPM2220V电机CSPM4380V电机功率代码含义10100W20200W40400W75750W1001000W1501500W法兰代码法兰尺寸440*40mm660*60mm880*80mm11110*110mm13130*130mm15150*150mm18180*180mm编码器代码含义C1单圈绝对式17bitC3多圈绝对式23bitC6单圈绝对值17位磁编码器惯量代码含义S小惯量M中惯量E大惯量H特大惯量结构代码含义1键槽、有油封、无制动器2键槽、有油封、有制动器3圆轴、有油封、无制动器4圆轴、有油封、有制动器CSPM26-40M30C61系列法兰功率惯量转数编码器结构CSSF B2-100CS表示伺服产品系列;SE表示E系列伺服驱动器机箱外形:共有B、C、D外形机箱.电压等级:2表示交流单相/三相220V,4表示交流三相380V最大输出电流:100表示10A1.4E系列伺服器尺寸注意:伺服器工作时必须连接的控制插头和编码器插头分别增加如下图安装方向驱动器的高度和长度大约65mm。

E RHARDT + LKRS52-FR5502中文操作說明书目录一、KRS 定型机布边追踪器1.功能……………………………………………………………………2.装设……………………………………………………………………3.安装……………………………………………………………………4.设定编辑………………………………………………………………5.设定DC55.. ……………………………………………………………6.操作和控制盒NT5..……………………………………………………7.最佳的设定……………………………………………………………8.错误讯息………………………………………………………………9.保养维修………………………………………………………………10.技术数据………………………………………………………………3 8 9 11 17 23 24 27 32 32二、红外线布边追踪电眼FR 5502 (数字型)1.总论……………………………………………………………………2.功能……………………………………………………………………3.装设……………………………………………………………………4.安装……………………………………………………………………5.装置设定………………………………………………………………6.操作……………………………………………………………………7.内部设定以及错误讯息………………………………………………8.保养以及维修…………………………………………………………9.配件以及备用零件……………………………………………………10.配线图…………………………………………………………………11.技术数据………………………………………………………………36 36 37 38 39 41 43 46 46 46 46三、KR 52 布边追踪器驱动马达1.安全……………………………………………………………………2.性能设计………………………………………………………………3.功能……………………………………………………………………4.组装……………………………………………………………………5.安装……………………………………………………………………..6.保养维修………………………………………………………………7.损耗品…………………………………………………………………8.配件……………………………………………………………………9.替换注意事项……………………………………………………………10.技术数据…………………………………………………………………48 48 48 50 53 54 54 54 54 60标记说明→:作业要点‖:注意事项! :定型机布边追踪器安全操作事项构造操作说明E + L 定型机布边追踪器操作说明,由总体系统(A)、个别系统(B、C、…W﹚、其他备件表(X)、参数表(Y)、图表(Z)。
序言 0第一章控制系统的功能 (1)1.1电梯基本功能 (1)1.2选配功能 (4)第二章控制系统的组成与安装 (6)2.1控制系统的组成 (6)2.2控制系统的安装 (10)第三章液晶界面操作及参数说明 (14)3.1概述 (14)3.2键操作说明 (14)3.3液晶显示流程图及参数说明 (15)3.4监视窗口及操作说明 (19)附录一故障代码及说明 (22)序言ECS-MC2000/MC3000电梯控制系统是我公司在原有的ECS-MC控制系统基础上设计开发出的智能化更高、功能更强、调试与维护更方便的高技术产品。
它除了具有一般电梯控制系统的基本功能外,在系统参数设置、电梯功能选择、电梯调试与维护、现场适应能力等各方面有独到之处。
本系统的基本控制方式为串行通讯(CAN总线)与变频调速;可满足电梯楼层64层以下,电梯速度小于4米/秒,包括永磁同步电机在内的各种电梯电机的控制要求。
MC2000/MC3000型电梯电脑控制器的主板核心芯片是国际著名工业用单片机制造商FUJITSU的内部具有32位处理器的高端产品,集成度、可靠性堪称世界一流;软件设计充分体现了功能齐备,参数设置界面层次分明,调试及故障诊断信息充分,抗干扰能力强及干扰强度评价独具匠心的技术特点。
对电梯控制系统以外的电气元件设计了诊断与检测界面。
使电梯故障判断有的放矢,真正使该电梯控制系统做到了高性能与可靠性的完美统一,高水平与实用性的完美统一,高科技与应用简便的完美统一。
警告用户在使用本系统时应严格按照国家电梯标准的要求进行作业,并且详细阅读本系统所使用的说明书。
上述文件中涉及人身安全的部分均作为本系统对使用者的警告。
注意说明书中的符号与框图可能有更改,用户应以随机图纸为准。
第一章控制系统的功能1.1 电梯基本功能1.1.1 检修运行系统具有三组(或两组)检修开关。
优先级别由高至低分别为:轿顶检修开关,轿内检修开关(如果有此开关),控制柜紧急电动运行开关。

N E W东能伺服手册 Prepared on 22 November 2020交流全数字伺服驱动器EPS系列基础技术手册●非常感谢您选购EPS系列交流伺服驱动器●在您使用驱动器之前,请仔细阅读本技术手册,按照手册上的规范操作·安全注意事项 ·(使用前请仔细阅读)在产品的安装、运行、维护和检查前请仔细阅读本技术手册,在熟悉了有关设备的知识、安全信息和全部注意事项后再使用本产品。
请将此技术手册妥善保存,以备随时查阅。
如果您不能解决产品出现的问题,请及时联系我们。
⏹由于产品的改进,手册内容可能变更,恕不另行通知。
⏹在未得我公司授权下,用户对产品的改动我公司将不承担任何责任,产品的保修将因此作废。
注意下列警告,以免伤害人员、防止器件损坏。
⏹下列符号表示哪些是禁止的操作,哪些是必须遵守的。
表示禁止操作目录第一章功能和构成EPS系列驱动器技术规格表驱动器技术规格EPS系列驱动器功能表驱动器功能一览表EPS系列驱动器命名规则例如:EPS2—TA150L123(H)注:通用A和通用B的区别:编码器信号分周输出脉波信号的功能不同,通用A分频比只能取1-255整除倍脉波信号数,通用B可以任意取输出脉波信号数。
以2500线编码器为例,若想得到500 pusle的分周输出,对于EPS2 - T A xxx L xxx驱动器,直接设定PA25=5即可;对于EPS2 - T B xxx L xxx驱动器,直接设定PA25=500即可。
EPS2系列驱动器外形尺寸. EPS□—040~EPS□—075伺服驱动器外形尺寸(单位:mm)图1-1EPS2—040伺服驱动器外形尺寸如上图EPS□—100~EPS□—200伺服驱动器外形尺寸(单位:mm)图1-2EPS2—150伺服驱动器外形尺寸如上图. EPS□—300~EPS□—450伺服驱动器外形尺寸(单位:mm)图1-3EPS2—300伺服驱动器外形尺寸如上图型号参数转速(r/min)转矩功率(W)各部分名称图1-3 EPS系列驱动器外观图(3000W为例)图1-4 伺服电机外观图第二章安装环境条件伺服驱动器使用、保存环境条件如表所示。
ENC-1s操作说明书ENC-1S型单轴电机控制系统操作手册1 概述:ENC-1S型单轴电机控制系统是一种适用于单坐标点位控制的通用型控制系统,控制对象为步进电机或数字式交流伺服电机,及16点开关量输入输出。
本机显示采用中文方式,操作界面友好、简单。
为了能够正确地使用本系统,请操作人员认真阅读本说明书。
2系统操作面板系统操作面板是人机对话的界面,使用者用键盘向系统输入程序和命令,系统通过LCD显示屏对人们的指令作出反应。
2.1 显示窗口显示窗口是一面192*64点阵的图形液晶屏,示意如下:图2:ENC-1S型单轴电机控制系统的显示屏显示窗口可以显示4排文字,每排12个汉字或16个ASCII 字符。
显示窗口在不同的操作状态下显示不同的系统资讯,具体情况稍后再叙。
2.2 系统按键说明:数控系统是通过键盘来识别操作者的命令的。
操作者须使用系统面板上的按键来将加工程序逐个字符地输入数控系统内部的存储器,并且能够进行检查、插入、删除等编辑操作。
序号键名功能属性1 P工件号字母2 N/0 程序段号标识/ 数字0 字母/数字3 G/1 准备功能标识/ 数字1 字母/数字4 X/2 直线绝对坐标标识/ 数字2 字母/数字5 U/3 直线相对坐标标识/ 数字3 字母/数字6 C/4 旋转坐标标识/ 数字4 字母/数字7 I/5 辅助坐标标识/ 数字5 字母/数字8 F/6 速度及延时标识/ 数字6 字母/数字9 S/7 模拟输出标识/ 数字7 字母/数字10 M/8 辅助功能标识/ 数字8 字母/数字11 L/9 跳转及循环标识/数字9字母/数字12 ±/. 正负号/ 小数点符号13 ESC 退出,取消编辑14 RTN 回车键,完成一项输入编辑15 参数设置系统参数编辑16 ↑ X负向运动编辑/控制17 ↓ X正向运动编辑/控制18 ← 修改选项编辑19 → 修改选项编辑20 启动开始加工程序运行控制21 停止暂停电机运行控制22 功放电机驱动使能控制控制23 回零返回程序起点控制24 原点返回机械参考点控制25 主轴发出主轴启停信号控制26 RES 系统初始化控制图3: ENC-1S单轴电机控制系统的键盘定义3 系统的编程操作为将在纸面上编好的程序输入系统存储器,以及进行必要的检查、修改,需通过一系列的按键操作来实现。