R2机器人电路原理图
- 格式:pdf
- 大小:59.98 KB
- 文档页数:1

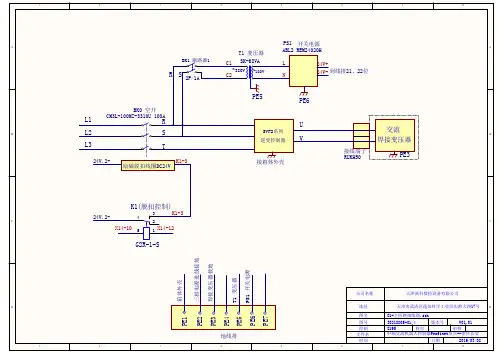
课程设计任务书学生姓名:冀阳博专业班级:电气1001指导教师:龚跃玲工作单位:自动化学院1、题目: 机器人行走电路设计任务:设计一个能前进、后退的机器人行走控制电路。
要求:1)接通电源,机器人前进,行走一段时间后,机器人自动后退,退行一段时间后自动前行,周而复始。
2)机器人行走动力只能使用干电池,不能使用动力电源。
3)机器人前进、后退时间可调。
4)对设计电路进行仿真。
2、初始条件1.实验室提供万用表、信号发生器、直流稳压电源、示波器等设备。
2.学生已学习了大学基础课程和《电路》、《模拟电子技术》、《数字电子技术》、《电力电子变流技术》等专业基础课程。
3.主要参考文献1)《新编电子电路大全》第1、2、3、4卷中国计量出版社2)《传感器及其应用电路》何希才编著电子工业出版社3)《电力电子变流技术》黄俊王兆安编机械工业出版社4)《集成电路速查手册》王新贤主编山东科学技术出版社5)《集成电路速查大全》尹雪飞陈克安编西安电子科技大学出版社6)《晶体二极管手册》各种版本皆可7)《晶体三极管手册》各种版本皆可3、要求完成的主要任务1.课程设计结束时每个学生要交一份按统一格式要求撰写的课程设计说明书,并装订成册。
2.课程设计说明书中每个题目要求有方案比较、绘制方框图、电原理图,阐述电路工作原理、每个元器件的主要参数、设计电路的性能指标及电路仿真效果图等。
3.说明书中除个人签名外,其它文字、符号、图形或表格一律用计算机打印。
4.文字、符号、图形等必须符合国家标准。
5.独立完成设计任务,严禁相互抄袭。
4、时间安排设计时间为二周(6月25日—7月6日),安排如下:1.6月25日上午,指导教师讲授课程设计的有关基本知识等。
2.6月25日下午——7月1日学生查阅资料,完成初步设计。
3.7月2日——7月3日检查设计进度,答疑、质疑。
4.7月4日——7月5日完善设计,形成设计说明书电子文档。
4.7月5日——7月6日课程设计打印、装订、提交。

不二越电源电路测绘与原理分析陈云龙 130012 一汽轿车股份有限公司摘要我公司于2004年采购了几十台不二越机器人,在公司目前拥有的600多台机器人中,是比较老的产品,产品随长期使用逐渐劣化,并由于备件问题,经常造成较多的停台。
为此,需要对产品的原理进行深入解析,并培养自主维修能力。
其中机器人电源是常损坏的器件之一。
为了降低成本,我们自己测绘了该电源的电路,并通过查询大量开关电源的资料,对其做了详尽的解析,完全掌握了开关电源的维修技术。
关键词开关电源机器人测绘原理维修1 不二越电源电路原理图该电路实际上是一个比较典型的普通PWM开关电源电路。
脉冲宽度的自动调节取决于反馈电平与振荡器三角波的比较。
它是一个正激式隔离开关电源电路。
隔离变压器包括三个绕组,第三绕组为芯片提供启动电路电源。
电路使用了最简单的单管结构。
开关管使用了MOSFET器件:2SK1939(2501),N沟道,功率100W。
使用线性光电耦合器从输出端引回F/B电压及OVP过压反馈,F/B电压基准为基准电源器件。
同时引入了过流保护电路等。
它是一个非谐振式的变换器,即常规的硬开关。
图1、图2是经过我们测绘后的该电源的原理图。
电源输出电压为5VDC。
下面具体分析各单元电路结构及原理。
1输入电路输出电路图1:开关电源原理图(输入、输出部分)G+i2图2:开关电源原理图(控制电路、变换器部分)Gnd4.7kVccGndCF Ton ToffVFCLM+CLM-CTECVoutDET F/B HeatSink4.7k10010015015kON/OFFOVP光电2光电12 电路分解分析2.1 输入电路图3:不二越电源输入电路该电路包含滤波、浪涌抑制及全波整流电路。
输入电路各电容C11、C12、C13用于滤波,滤除高频噪声;电抗器L11用于浪涌抑制;电容C14、C15、C18用于去耦。
输入220VAC电压经过全波整流,产生变换器所需的直流电压,及提供控制电路电源。
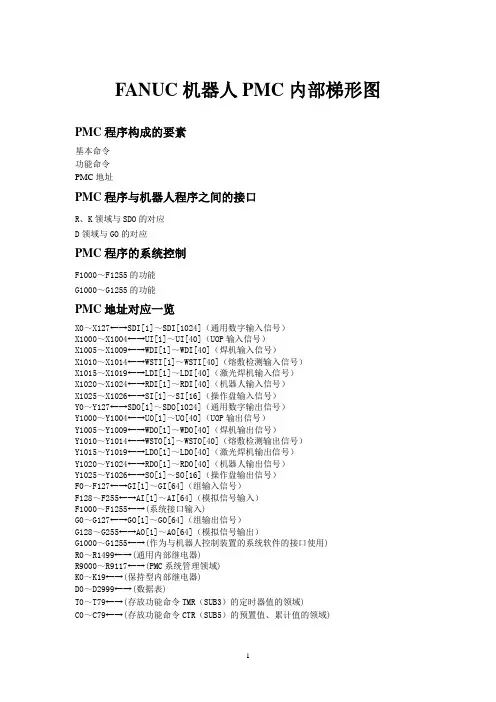
FANUC机器人PMC内部梯形图PMC程序构成的要素基本命令功能命令PMC地址PMC程序与机器人程序之间的接口R、K领域与SDO的对应D领域与GO的对应PMC程序的系统控制F1000~F1255的功能G1000~G1255的功能PMC地址对应一览X0~X127←→SDI[1]~SDI[1024](通用数字输入信号)X1000~X1004←→UI[1]~UI[40](UOP输入信号)X1005~X1009←→WDI[1]~WDI[40](焊机输入信号)X1010~X1014←→WSTI[1]~WSTI[40](熔敷检测输入信号)X1015~X1019←→LDI[1]~LDI[40](激光焊机输入信号)X1020~X1024←→RDI[1]~RDI[40](机器人输入信号)X1025~X1026←→SI[1]~SI[16](操作盘输入信号)Y0~Y127←→SDO[1]~SDO[1024](通用数字输出信号)Y1000~Y1004←→UO[1]~UO[40](UOP输出信号)Y1005~Y1009←→WDO[1]~WDO[40](焊机输出信号)Y1010~Y1014←→WSTO[1]~WSTO[40](熔敷检测输出信号)Y1015~Y1019←→LDO[1]~LDO[40](激光焊机输出信号)Y1020~Y1024←→RDO[1]~RDO[40](机器人输出信号)Y1025~Y1026←→SO[1]~SO[16](操作盘输出信号)F0~F127←→GI[1]~GI[64](组输入信号)F128~F255←→AI[1]~AI[64](模拟信号输入)F1000~F1255←→(系统接口输入)G0~G127←→GO[1]~GO[64](组输出信号)G128~G255←→AO[1]~AO[64](模拟信号输出)G1000~G1255←→(作为与机器人控制装置的系统软件的接口使用)R0~R1499←→(通用内部继电器)R9000~R9117←→(PMC系统管理领域)K0~K19←→(保持型内部继电器)D0~D2999←→(数据表)T0~T79←→(存放功能命令TMR(SUB3)的定时器值的领域)C0~C79←→(存放功能命令CTR(SUB5)的预置值、累计值的领域)PMC程序内置PMC功能是使梯形语言记录的PMC程序,在机器人控制装置内部高速运行的功能。