_ANSYS_Workbench_15.0_有限元分析培训(第二讲)
- 格式:pdf
- 大小:4.00 MB
- 文档页数:57

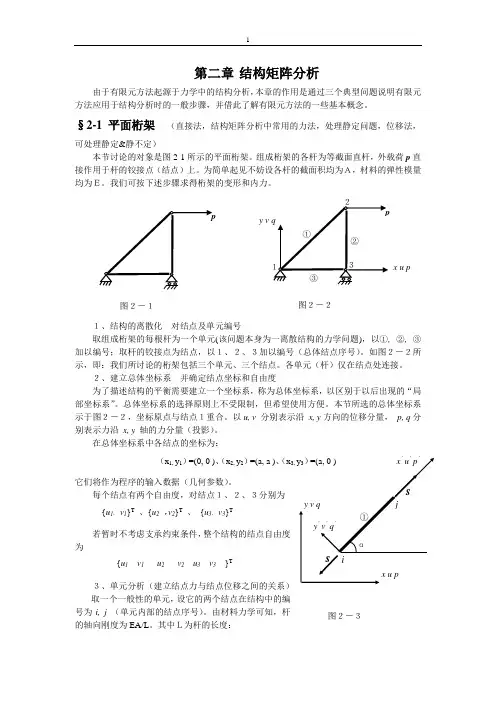
第二章 结构矩阵分析由于有限元方法起源于力学中的结构分析,本章的作用是通过三个典型问题说明有限元方法应用于结构分析时的一般步骤,并借此了解有限元方法的一些基本概念。
§2-1平面桁架(直接法,结构矩阵分析中常用的力法,处理静定问题,位移法,可处理静定&静不定)本节讨论的对象是图2-1所示的平面桁架。
组成桁架的各杆为等截面直杆,外载荷p 直接作用于杆的铰接点(结点)上。
为简单起见不妨设各杆的截面积均为A,材料的弹性模量均为E。
我们可按下述步骤求得桁架的变形和内力。
1、结构的离散化 对结点及单元编号取组成桁架的每根杆为一个单元(该问题本身为一离散结构的力学问题),以①, ②, ③ 加以编号;取杆的铰接点为结点,以1、2、3加以编号(总体结点序号)。
如图2-2所示,即:我们所讨论的桁架包括三个单元、三个结点。
各单元(杆)仅在结点处连接。
2、建立总体坐标系 并确定结点坐标和自由度为了描述结构的平衡需要建立一个坐标系,称为总体坐标系,以区别于以后出现的“局部坐标系”。
总体坐标系的选择原则上不受限制,但希望使用方便。
本节所选的总体坐标系示于图2-2,坐标原点与结点1重合。
以u, v 分别表示沿 x, y 方向的位移分量, p, q 分别表示力沿 x, y 轴的力分量(投影)。
在总体坐标系中各结点的坐标为:它们将作为程序的输入数据(几何参数)。
每个结点有两个自由度,对结点1、2、3分别为若暂时不考虑支承约束条件,整个结构的结点自由度为3、单元分析(建立结点力与结点位移之间的关系) 取一个一般性的单元,设它的两个结点在结构中的编号为i, j (单元内部的结点序号)。
由材料力学可知,杆的轴向刚度为EA/L 。
其中L为杆的长度:图2-1x u p 图2-2图2-3 (x 1, y 1)=(0, 0 )、(x 2, y 2)=(a, a )、(x 3, {u 1,v 1}T 、 {u 2 ,v 2}T 、 {u 3, v 3}T {u 1 v 1 u 2 v 2 u 3 v 3 }T(1)单元局部坐标系现选取一典型单元对其进行单元分析,对所分析的单元按如下方式建立一个坐标系: 原点:与结点i 重合, x ’轴:沿 i ,j 方向, y ’轴:与x ’轴垂直。

第一章第章ANSYS Workbench介绍ANSYS Workbench概述Training Manual •什么是ANSYS Workbench?–ANSYS Workbench提供了与ANSYS系列求解器相交互的强大方法。
这种环境为CAD系统和您的设计过程提供了独一无二的集成。
系统和您的设计过程提供了独一无二的集成•ANSYS Workbench由多种应用组成(一些例子):–Mechanical用ANSYS求解器进行结构和热分析。
•网格划分也包含在Mechanical应用中M h i l–Fluid Flow (CFX) 用CFX进行CFD分析–Fluid Flow (FLUENT) 用FLUENT进行CFD分析Geometry(DesignModeler)几何体为在–Geometry (DesignModeler)创建和修改CAD几何体,为在Mechanical中所用的实体模型做准备。
–Engineering Data 定义材料属性。
g pp–Meshing Application 创建CFD和显式动态网格–Design Exploration用于优化分析–Finite Element Modeler (FE Modeler)转换NASTRAN和ABAQUS 中的网格以便在ANSYS中使用Bl d G(Bl d G t)–BladeGen (Blade Geometry)用于创建叶片几何–Explicit Dynamics用于非线性动态的显式动态模拟特性建模Training Manual… ANSYS Workbench 概述•The Workbench 提供两种类型的应用:–本地应用(工作区): 现有的本地应用有Project Schematic, Engineering Data d D i E l ti and Design Exploration 。
•本地应用完全在Workbench 窗口中启动和运行。
第1章初识ANSYSWorkbench项目视图系统使用起来非常简单:直接从左边的工具箱(Toolbox)中将所需的分析系统拖曳到右边的项目视图窗口中或双击即可。
工具箱(Toolbox)中的分析系统(AnalysisSystems)部分,包含了各种已预置好的分析类型(如显式动力分析、FLUENT流体分析、结构模态分析、随机振动分析等),每一种分析类型都包含完成该分析所需的完整过程(如材料定义、几何建模、网格生成、求解设置、求解、后处理等过程),按其顺序一步步往下执行即可完成相关的分析任务。
当然也可从工具箱中的ComponentSystems里选取各个独立的程序系统,自己组装成一个分析流程。
一旦选择或定制好分析流程后,Workbench平台将能自动管理流程中任何步骤发生的变化(如几何尺寸变化、载荷变化等),自动执行流程中所需的应用程序,从而自动更新整个仿真项目,极大缩短了更改设计所需的时间。
Workbench仿真流程具有良好的可定制性,只须通过鼠标拖曳操作,即可非常容易地创建复杂的、包含多个物理场的耦合分析流程,在各物理场之间所需的数据传输也能自动定义。
ANSYSWorkbench平台在流体和结构分析之间自动创建数据连接以共享几何模型,使数据保存更轻量化,并更容易分析几何改变对流体和结构两者产生的影响。
同时,从流体分析中将压力载荷传递到结构分析中的过程也是完全自动的。
工具栏中预置的分析系统(AnalysisSystems)使用起来非常方便,因为它包含了所选分析类型所需的所有任务节点及相关应用程序。
Workbench项目视图的设计是非常柔性的,用户可以非常方便地对分析流程进行自定义,把ComponentSystems中的各工具当成砖块,按照任务需要进行装配。
ANSYSWorkbench环境中的应用程序都是支持参数变量的,包括CAD几何尺寸参数、材料特性参数、边界条件参数以及计算结果参数等。
在仿真流程各环节中定义的参数都是直接在项目窗口中进行管理的,因而非常容易研究多个参数变量的变化。
Workbench软件基本培训资料1.软件背景、特点简介1.1.软件背景Workbench是ANSYS公司开发的新一代协同仿真环境:1997年,ANSYS公司基于广大设计的分析应用需求、特点,开发了专供设计人员应用的分析软件ANSYS DesignSpace(DS),其前后处理功能与经典的ANSYS软件完全不同,软件的易用性和与CAD接口非常棒。
2000年,ANSYS DesignSpace的界面风格更加深受广大用户喜爱,ANSYS公司决定提升ANSYS DesingnSpace的界面风格,以供经典的ANSYS软件的前后处理也能应用,形成了协同仿真环境:ANSYS Workbench Environment(AWE)。
其功能定位于:①重现经典ANSYS PP软件的前后处理功能;②新产品的风格界面;③收购产品转化后的最终界面;④用户的软件开发环境;2001年,在AWE上,开发了ANSYS DesignModeler(DM), ANSYS DesignXplorer(DX), ANSYS DesignXplorer VT(DX VT), ANSYS Fatigue Module (FM), ANSYS CAE Template 等。
当时目的是和DS共同提供给用户先进的CAE技术。
同年,ANSYS Inc.允许以前只能在ACE上运行的MP, ME, ST等产品,也可在AWE 上运行。
用户在启动这些产品时,可以选择ACE,也可选择AWE。
AWE可作为ANSYS 软件的新一代前后处理,还未支持ANSYS所有的功能,目前主要支持大部分的ME和ANSYS Emag的功能,而且与ACE的PP并存。
1.2.特点:1.2.1.协同访真、项目管理集设计、仿真、优化、网格变形等功能于一体,对各种数据进行项目协同管理。
1.2.2.双向的参数传输功能支持CAD-CAE间的双向参数传输功能;1.2.3.高级的装配部件处理工具具有复杂装配件接触关系的自动识别、接触建模功能;1.2.4.先进的网格处理功能可对复杂的几何模型进行高质量的网格处理;1.2.5.分析功能支持几乎所有ANSYS Mechanica的有限元分析功能;10.0:2-D、3-D Structure Analysis(Static、Squence、Harmonic、Fatigue、Frequence、Bulking、Shape Optimization)、2-D、3-D thermal Analysis(Static、Transient)、3-D Electromagnetic等;11.0:2-D、3-D Structure Analysis(Static、Squence、Harmonic、Fatigue、Frequence、Bulking、Shape Optimization)、2-D、3-D thermal Analysis(Static、Transient)、3-D Electromagnetic等;1.2.6.内嵌可定制的材料库自带可定制的工程材料数据库,方便操作者进行编辑、应用。