BLDC和PMSM电机的构造及驱动方案介绍
- 格式:doc
- 大小:26.00 KB
- 文档页数:7
一文了解BLDC与PMSM的区别现代电机与控制技术以电流驱动模式的不同将永磁无刷直流电动机分为两大类:1)方波驱动电机,也即无刷直流电机(BLDC);2)正弦波驱动电机:也即永磁同步电机(PMSM)。
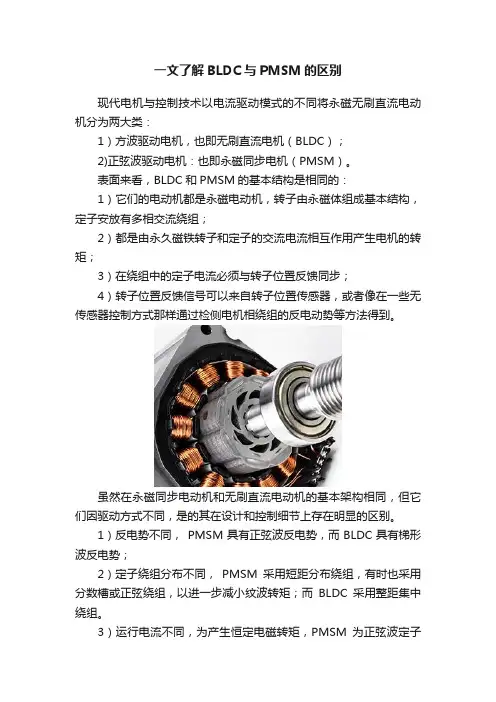
表面来看,BLDC和PMSM的基本结构是相同的:1)它们的电动机都是永磁电动机,转子由永磁体组成基本结构,定子安放有多相交流绕组;2)都是由永久磁铁转子和定子的交流电流相互作用产生电机的转矩;3)在绕组中的定子电流必须与转子位置反馈同步;4)转子位置反馈信号可以来自转子位置传感器,或者像在一些无传感器控制方式那样通过检侧电机相绕组的反电动势等方法得到。
虽然在永磁同步电动机和无刷直流电动机的基本架构相同,但它们因驱动方式不同,是的其在设计和控制细节上存在明显的区别。
1)反电势不同,PMSM具有正弦波反电势,而BLDC具有梯形波反电势;2)定子绕组分布不同,PMSM采用短距分布绕组,有时也采用分数槽或正弦绕组,以进一步减小纹波转矩;而BLDC采用整距集中绕组。
3)运行电流不同,为产生恒定电磁转矩,PMSM为正弦波定子电流;BLDC为矩形波电流。
4)永磁体形状不同,PMSM永磁体形状呈抛物线形,在气隙中产生的磁密尽量呈正弦波分布;BLDC永磁体形状呈瓦片形,在气隙中产生的磁密呈梯形波分布。
5)运行方式不同,PMSM采用三相同时工作,每相电流相差120°电角度,要求有位置传感器。
BLDC采用绕组两两导通,每相导通120°电角度,每60°电角度换相,只需要换相点位置检测。
正是这些不同之处,使得在对PMSM和BLDCM的控制方法、控制策略和控制电路上有很大差别。
因设计上和控制上存在区别,导致PMSM和BLDC特性也不同,性能对比如下:1转矩波动转矩脉动是机电伺服系统的最大问题, 它直接影响精确的位置控制和高性能的速度控制很困难。
在高速情况下,转子惯量可以过滤掉转矩波动。
但在低速和直接驱动应用场合,转矩波动将严重影响系统性能,将使系统的精度和重复性恶化。
永磁同步伺服电机(PMSM)的基本结构和控制单元驱动器原理导语:永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。
全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。
随着现代电机技术、现代电力电子技术、微电子技术、永磁材料技术、交流可调速技术及控制技术等支撑技术的快速发展,使得永磁交流伺服技术有着长足的发展。
永磁交流伺服系统的性能日渐提高,价格趋于合理,使得永磁交流伺服系统取代直流伺服系统尤其是在高精度、高性能要求的伺服驱动领域成了现代电伺服驱动系统的一个发展趋势。
永磁交流伺服系统具有以下等优点:电动机无电刷和换向器,工作可靠,维护和保养简单;定子绕组散热快;惯量小,易提高系统的快速性;适应于高速大力矩工作状态;相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。
永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。
全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。
现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。
伺服驱动器有两部分组成:驱动器硬件和控制算法。
控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。
交流永磁伺服系统的基本结构交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。
其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。

BLDC无刷直流电机的原理及驱动基础无刷直流电机(BLDC,也称为马达驱动)是电机和控制技术相结合的产品,电调控制电机的运行,从电流驱动角度来看,无刷直流电机可分为正弦波驱动和方波驱动。
通常,以方波驱动的电机称为无刷直流电机(BLDC),正弦波驱动的电机则为永磁同步电机(PMSM)。
无刷直流电机,跟永磁同步电机,基本结构相似,主要区别在于控制器电流的驱动方式不同。
产生相位差120度的正弦三相电,要不断的调整三路、或是六路PWM的占空比,这要求较高的处理速度。
给电机供相位差120度的方波,电机运转噪音虽大一些,但电机仍可以基本平稳的运转,方波驱动方式对处理器的速度要求低了很多。
所以方波驱动方式就广泛应用开来。
一、方波控制理论基础方波控制也叫六步控制,在一个电周期中,电机只有六种转态,或者说定子电流有六种状态(三相桥臂有六种开关状态)。
每一种电流状态都可看作合成一个方向的矢量力矩,六个矢量有规律地、一步接一步地转换,矢量旋转方向决定了电机旋转方向(顺时针或是逆时针),电机转子会跟着同步旋转。
在方波控制里,主要是对两个量进行控制,一个是电机转子位置对应的开管状态,有Hall时,通过Hall信息获取转子位置,无传感器时,通过反电动势信息获取转子位置,从而决定开管状态;第二个是PWM占空比的控制,通过控制占空比的大小来控制电流大小,从而控制转矩和转速。
二、方波算法实现步骤(1)Hall 方波控制:1.读取母线电流采样的AD 值,计算母线电流2.电流环计算应该给的PWM 占空比,控制电流为给定电流大小3. 读取hall 状态,根据Hall 状态与三相桥臂开管状态关系数组,得到相应的开管状态,每次hall 状态的跳变沿及为三相桥臂状态切换的时间点(也称为换相点)。
4. Hall 相邻状态间的扇区为一个电周期的六分之一,即为60°,用定时器可记录60°扇区所用的时间,从而计算电流频率,从而得到电机转速。
半导体器件应用网/news/190158_p2.html 无刷直流(BLDC)电机的构造原理及电源控制方案【大比特导读】无刷直流(Brushless Direct Current,BLDC)电机是一种正快速普及的电机类型,它可在家用电器、汽车、航空航天、消费品、医疗、工业自动化设备和仪器等行业中使用。
引言无刷直流 (Brushless Direct Current, BLDC)电机是一种正快速普及的电机类型,它可在家用电器、汽车、航空航天、消费品、医疗、工业自动化设备和仪器等行业中使用。
正如名称指出的那样, BLDC 电机不用电刷来换向,而是使用电子换向。
BLDC 电机和有刷直流电机以及感应电机相比,有许多优点。
其中包括:•更好的转速-转矩特性•快速动态响应•高效率•使用寿命长•运转无噪音•较高的转速范围此外,由于输出转矩与电机体积之比更高,使之在需要着重考虑空间与重量因素的应用中,大有用武之地。
在本应用笔记中,我们将详细讨论 BLDC 电机的构造、工作原理、特性和典型应用。
描述 BLDC 电机时常用术语的词汇表,请参见附录 B:“词汇表”。
构造和工作原理BLDC 电机是同步电机中的一种。
也就是说,定子产生的磁场与转子产生的磁场具有相同的频率。
BLDC 电机不会遇到感应电机中常见的“差频”问题。
BLDC 电机可配置为单相、两相和三相。
定子绕组的数量与其类型对应。
三相电机最受欢迎,使用最普遍。
本应用笔记主要讨论三相电机。
"BLDC 电机的定子由铸钢叠片组成,绕组置于沿内部圆周轴向开凿的槽中 (如图 3 所示)。
定子与感应电机的定子十分相似,但绕组的分布方式不同。
多数 BLDC 电机都有三个星型连接的定子绕组。
这些绕组中的每一个都是由许多线圈相互连接组成的。
在槽中放置一个或多个线圈,并使它们相互连接组成绕组。
沿定子圆周分布这些绕组,以构成均均匀分布的磁极。
有两种类型的定子绕组:梯形和正弦电机。

三相BLDC和PMSM设计的低压马达控制方案三相BLDC/PMSM低压马达控制方案采用MC9S08AC16系列器件.这种8位MCU采用增强的HCS08内核,具有低成本和高性能,系列有各种模块,存储器容量,存储器类型和封装形式.MC9S08AC16和MC9S08AC8用于消费类电子和工业,MC9S08AW16A和MC9S08AW8A用于汽车电子.本文介绍了MC9S08AC16系列主要特性,方框图,以及三相BLDC和PMSM低压马达控制方案主要特性,详细电路图以及材料清单(BOM).3-Phase BLDC/PMSM Low- Voltage Motor Control DriveThe MC9S08AC16 Series devices are members of the low-cost, high-performance HCS08 Family of 8-bit microcontroller units (MCUs). All MCUs in the family use the enhanced HCS08 core and are available with a variety of modules, memory sizes, memory types, and package types.MC9S08AC16 Series Devices• Consumer & Industrial— MC9S08AC16MC9S08AC8• Automotive— MC9S08AW16A— MC9S08AW8A8-Bit HCS08 Central Processor Unit (CPU)• 40-MHz HCS08 CPU (central processor unit)• 20-MHz internal bus frequency• HC08 instruction set with added BGND instruction• Background debugging system• Breakpoint capability to allow single breakpoint setting during in-circuit debugging (plus two more breakpoints in on-chip debug module)• Debug module containing two comparators and nine trigger modes.Eight deep FIFO for storing change-of-flow addresses and event-only data. Debug module supports both tag and force breakpoints.• Support for up to 32 interrupt/reset sourcesMemory Options• Up to 16 KB of on-chip in-circuit programmable FLASH memory with block protection and security options• Up to 1 KB of on-chip RAMClock Source Options• Clock source options include crystal, resonator, external clock, or internally generated clock with precision NVM trimmingSystem Protection• Optional computer operating properly (COP) reset with option to run from independent internal clock source or bus clock• Low-voltage detection with reset or interrupt• Illegal opcode detect ion with reset• Illegal address detection with resetPower-Saving Modes• Wait plus two stopsPeripherals• ADC — 8-channel, 10-bit analog-to-digital converter with automatic compare function• SCI — Two serial communications interface modules with optional13-bit break• SPI — Serial peripheral interface module• IIC — Inter-integrated circuit bus module to operate at up to 100 kbps with maximum bus loading; capable of higher baud rates withreduced loading• Timers — Three 16-bit timer/pulse-width modulator (TPM) modules —Two 2-channel and one 4-channel; each has selectable input capture, output compare, and edge-aligned PWM capability on each channel. Each timer module may be configured for buffered,centered PWM (CPWM) onall channels• KBI — 7-pin keyboard interrupt moduleInput/Output• Up to 38 general-purpose input/output (I/O) pins• Software selectable pullups on ports when used as inputs• Software selectable slew rate control on ports when used as outputs• Software selectable dri ve strength on ports when used as outputs• Master reset pin and power-on reset (POR)• Internal pullup on RESET, IRQ, and BKGD/MS pins to reduce customer system costPackage Options• 48-pin quad flat no-lead package (QFN)• 44-pin low-profile quad flat package (LQFP)• 42-pin shrink dual-in-line package (SDIP)• 32-pin low-profile quad flat package (LQFP)图1.MC9S08AC16系列方框图图2.MC9S08AC16系统时钟分布方框图三相BLDC/PMSM低压马达控制驱动方案Freescale’s 3-Phase BLDC/PMSM Low-Voltage Motor Control Drive is a 3-phase power stage that will operate with DC input voltages in the range 12–24 V, 4 A. Together with the daughter boards, it provides asoftware-development platform that allows algorithms to be writtenand tested without designing and building any hardware. It supports a variety of algorithms for PMSM and brushless DC (BLDC) motors.The 3-Phase BLDC/PMSM Low-Voltage Motor Control Drive containsreverse-polarity protection circuitry, MOSFET-gate-drive circuits, analog-signal conditioning, low-voltage power supplies and bridge MOSFETs. The power devices do not need to be mounted on a heatsink.There are controller daughter boards available with these controllers:•MC56F8013/23 — LQFP32•MC9S08AC16 — LQFP44•MCF51AC256 — LQFP80•MC9S08MP16 — LQFP48•MC56F8006 — LQFP32板主要特性:•Power supply voltage input 12–24 V DC, extended up to 50 V (see chapter 2.2 Electrical Characteristics for details)•Output current 4 A•Power supply reverse polarity protection circuitry•3-phase bridge inverter (6 MOSFET’s)•3-phase MOSFET gate driver with overcurrent and undervoltage protection•3-phase and DC-bus-current-sensing shunts•DC-bus voltage sensing•3-phase back-EMF voltage-sensing circuitry•Low-voltage on-board power supplies•Encoder/hall sensor sensing circuitry•Motor power and signal connectors•2 connectors for daughter board connection•CAN physical layer•USB interface•User LED, power-on LED, 6 PWM LED diodes, and SCI activity LED diodes•Up, down, toggle switches•Reset push-button图3.三相BLDC/PMSM低压马达控制驱动板外形图。


BLDC与PMSM的性能对比无刷直流电机原理与有刷电机相同,但无刷电机是通过电路来换向的.直流电机具有响应快速,较大的起动转矩,从零转速至额定转速具备可提供额定转矩的性能,但直流电机的优点也正是它的缺点,因为直流电机要产生额定负载下恒定转矩的性能,则电枢磁场与转子磁场须恒维持90°,这就要藉由碳刷及整流子.碳刷及整流子在电机转动时会产生火花,碳粉因此除了会造成组件损坏之外,使用场合也受到限制.交流电机没有碳刷及整流子,免维护,坚固,应用广,但特性上若要达到相当于直流电机的性能须用复杂控制技术才能达到.现今半导体发展迅速功率组件切换频率加快许多,提升驱动电机的性能.微处理机速度亦越来越快,可实现将交流电机控制置于一旋转的两轴直交坐标系统中,适当控制交流电机在两轴电流分量,达到类似直流电机控制并有与直流电机相当的性能.直流无刷电机的控制结构直流无刷电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(P)影响:N=120.f / P。
在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。
直流无刷电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。
也就是说直流无刷电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
直流无刷驱动器包括电源部及控制部如图 (1) :电源部提供三相电源给电机,控制部则依需求转换输入电源频率。
电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器(converter)转成直流。
不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(inverter)转成3相电压来驱动电机。
换流器(inverter)一般由6个功率晶体管(Q1~Q6)分为上臂(Q1、Q3、Q5)/下臂(Q2、Q4、Q6)连接电机作为控制流经电机线圈的开关。
交流永磁同步电机和直流永磁同步电机
永磁同步电机(PMSM)和直流永磁同步电机(BLDC)都属
于永磁同步电机,具有高效、高转矩密度和高功率因数等特点。
但在一些方面有一些不同之处:
1. 功能原理:永磁同步电机利用定子绕组产生交流磁场,而永磁同步电机由于其永磁转子,不需要定子绕组,直接利用磁铁的永久磁场来产生旋转磁场。
2. 控制方式:永磁同步电机通常需要通过矢量控制(也称为磁场定向控制)来实现精确的转矩和速度控制,而直流永磁同步电机则可以简单地使用反电动势控制(亦称为背电势控制)控制转矩和速度。
3. 电源:永磁同步电机通常需要使用三相交流电源供电,而直流永磁同步电机则可以使用直流电源供电。
4. 制造成本:由于没有定子绕组,永磁同步电机的制造成本相对较低,而直流永磁同步电机的制造成本通常较高,因为其需要绕组。
最后,需要注意的是,BLDC电机是一种永磁同步电机的特定
类型,与一般的永磁同步电机相比,在控制策略和应用上有一些不同。
BLDC和PMSM电机的构造及驱动方案介绍无刷直流(BLDC)和永磁同步电机(PMSM)现在在许多应用中受到青睐,但运行它们的控制软件可能难以实现。
恩智浦的Kinetis电机套件弥补了与嵌入式控制软件和直观GUI的差距,最大限度地降低了软件的复杂性并加快了开发过程。
本文将简要介绍BLDC和PMSM电机的构造和关键操作参数,然后介绍如何驱动它们。
然后,它将讨论软件为何复杂,如何管理以及一些硬件选项。
然后,它将研究如何使用恩智浦的Kinetis电机套件启动和运行项目。
三相无刷直流电机(BLDC)及其近似同类电机,永磁同步电机(PMSM)已成为在过去十年中,由于其控制电子设备的成本急剧下降,新的控制算法激增,因此在过去的十年中,工业领域也越来BLDC电机具有高可靠性,高效率和高功率体积比。
它们可以高速运行(大于10,000 rpm),具有低转子惯量,允许快速加速,减速和快速反向,并具有高功率密度,将大量扭矩包装成紧凑的尺寸。
今天,它们被用于任何数量的应用,包括风扇,泵,真空吸尘器,四轴转换器和医疗设备,仅举几例。
PMSM与带有绕线定子和永磁转子的BLDC具有相似的结构,但定子结构和绕组更类似于AC感应电机,在气隙中产生正弦磁通密度。
PMSM与施加的三相交流电压同步运行,并且具有比交流感应电动机更高的功率密度,因为没有定子功率用于感应转子中的磁场。
今天的设计也更强大,同时具有更低的质量和惯性矩,使其对工业驱动,牵引应用和电器具有吸引力。
创造驱动器鉴于这些优势,它不是不知道这些电机是如此受欢迎。
然而,没有任何东西没有价格,在这种情况下,驱动和控制电路的复杂性。
消除换向电刷(及其伴随的可靠性问题)使得需要电气换向以产生定子旋转场。
这需要一个功率级(图1)。
图1:三相电机驱动的简化框图。
三个半桥在控制器的指导下切换电机相电流,其输出由前置驱动器放大和电平移位。
(使用Digi-Key方案绘制的图表- 它)星形连接的电机相连接到三个半桥驱动电路。
BLDC_原理与驱动BLDC(Brushless DC)电机是一种无刷直流电机,由于其高效率、高转速范围和较长寿命等特点,被广泛应用于各种领域。
本文将介绍BLDC 电机的工作原理和驱动方式。
首先,我们来了解一下BLDC电机的结构。
BLDC电机由定子(包括绕组)和转子(包括永磁体)组成。
定子绕组通过电流产生旋转的磁场,永磁体产生恒定的磁场。
转子上的传感器检测定子旋转磁场的位置,并向驱动器提供反馈信号。
驱动器根据传感器信号控制电流流向定子绕组,使得转子始终在最佳位置旋转。
BLDC电机的工作原理可以分为六个步骤:1.进行初级换相:根据初始传感器信号确定转子位置,使得电流开始流向正确的定子绕组。
2.当转子向前旋转时,传感器检测到新的位置,驱动器相应地改变电流的流向,保持转子在最佳位置旋转。
3.当电流流向定子绕组时,定子绕组产生旋转磁场,与永磁体的磁场相互作用,产生转矩。
此时,转子继续向前旋转。
4.当转子继续旋转时,传感器持续提供转子位置信息给驱动器,驱动器根据信息改变电流流向,保持转子在最佳位置旋转。
5.当转子达到最大速度或驱动器接收到停止命令时,驱动器停止改变电流流向,转子停止旋转。
6.当需要继续旋转时,回到第一步。
BLDC电机的驱动方式主要有两种:传感器驱动和传感器无刷驱动。
传感器驱动方式是通过传感器检测转子位置,并提供反馈信号给驱动器。
驱动器根据传感器信号控制电流流向定子绕组,使得转子始终在最佳位置旋转。
传感器驱动方式具有较高的控制精度和稳定性,但成本较高,且传感器容易受到环境和机械振动的影响。
传感器无刷驱动方式是通过开环控制,不需要传感器检测转子位置。
驱动器根据预先设定的电流的相序和时序驱动定子绕组,实现转子的旋转。
传感器无刷驱动方式具有成本低、结构简单的优点,但控制精度和稳定性相对较低。
无论是传感器驱动方式还是传感器无刷驱动方式,驱动器都需要一套合适的控制算法。
常见的控制算法有反电动势控制(BEMF Control)、电流环控制(Current Loop Control)和速度闭环控制(Speed ClosedLoop Control)等。
BLDC和PMSM电机的构造及驱动方案介绍
无刷直流(BLDC)和永磁同步电机(PMSM)现在在许多应用中受到青睐,但运行它们的控制软件可能难以实现。
恩智浦的Kinetis电机套件弥补了与嵌入式控制软件和直观GUI的差距,最大限度地降低了软件的复杂性并加快了开发过程。
本文将简要介绍BLDC和PMSM电机的构造和关键操作参数,然后介绍如何驱动它们。
然后,它将讨论软件为何复杂,如何管理以及一些硬件选项。
然后,它将研究如何使用恩智浦的Kinetis电机套件启动和运行项目。
三相无刷直流电机(BLDC)及其近似同类电机,永磁同步电机(PMSM)已成为在过去十年中,由于其控制电子设备的成本急剧下降,新的控制算法激增,因此在过去的十年中,工业领域也越来BLDC电机具有高可靠性,高效率和高功率体积比。
它们可以高速运行(大于10,000 rpm),具有低转子惯量,允许快速加速,减速和快速反向,并具有高功率密度,将大量扭矩包装成紧凑的尺寸。
今天,它们被用于任何数量的应用,包括风扇,泵,真空吸尘器,四轴转换器和医疗设备,仅举几例。
PMSM与带有绕线定子和永磁转子的BLDC具有相似的结构,但定子结构和绕组更类似于AC感应电机,在气隙中产生正弦磁通密度。
PMSM与施加的三相交流电压同步运行,并且具有比交流感应电动机更高的功率密度,因为没有定子功率用于感应转子中的磁场。
今天的设计也更强大,同时具有更低的质量和惯性矩,使其对工业驱动,牵引应用和电器具有吸引力。
创造驱动器
鉴于这些优势,它不是不知道这些电机是如此受欢迎。
然而,没有任何东西没有价格,在这种情况下,驱动和控制电路的复杂性。
消除换向电刷(及其伴随的可靠性问题)使得需要电气换向以产生定子旋转场。
这需要一个功率级(图1)。
图1:三相电机驱动的简化框图。
三个半桥在控制器的指导下切换电机相电流,其输出由前置驱动器放大和电平移位。
(使用Digi-Key方案绘制的图表- 它)。