数字信号处理08
- 格式:doc
- 大小:365.00 KB
- 文档页数:16
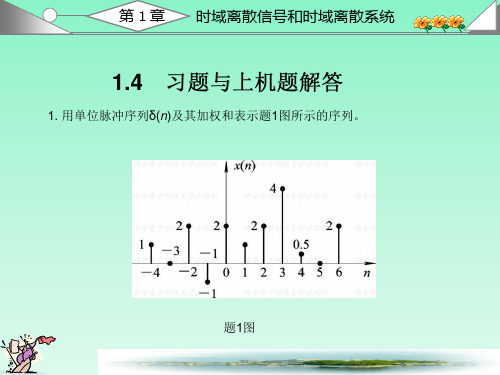



《数字信号处理》期末考试B卷答案一、单项选择题(本大题共10小题,每小题2分,共20分)在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内。
错选、多选或未选均无分。
1.已知某序列z变换的收敛域为有限z平面,则该序列为( A )。
A.有限长序列B.右边序列C.左边序列D.双边序列2.下列系统(其中y(n)是输出序列,x(n)是输入序列)中______属于线性系统。
( C )A.y(n)=x2(n)B.y(n)=4x(n)+6C.y(n)=n2x(n-n0)D.y(n)=e x(n)3.下列关于因果稳定系统说法错误的是( A )A.极点可以在单位圆外B.系统函数的z变换收敛区间包括单位圆C.因果稳定系统的单位抽样响应为因果序列D.系统函数的z变换收敛区间包括z=∞4.按时间抽取的基-2FFT算法的运算量按频率抽取的基-2FFT算法。
( C )A.大于B.小于C.等于D.大小不确定5.序列x(n)=R7(n),其16点DFT记为X(k),k=0,1,…,15则X(0)为( D )。
A.2B.3C.4D.76.下面描述中最适合DFT的是( B )A.时域为离散序列,频域也为离散序列B.时域为离散有限长序列,频域也为离散有限长序列C.时域为离散无限长序列,频域为连续周期信号D.时域为离散周期序列,频域也为离散周期序列7.序列x1(n)的长度为4,序列x2(n)的长度为3,则它们线性卷积的长度是,5点圆周卷积的长度是。
(B)A. 5, 5B. 6, 5C. 6, 6D. 7, 58.无限长单位冲激响应(IIR)滤波器的结构是______型的( C )A. 非递归B. 反馈C. 递归D. 不确定9.利用矩形窗函数法设计FIR滤波器时,在理想特性的不连续点附近形成的过滤带的宽度近似等于( A )。
A.窗函数幅度函数的主瓣宽度B.窗函数幅度函数的主瓣宽度的一半C.窗函数幅度函数的第一个旁瓣宽度D.窗函数幅度函数的第一个旁瓣宽度的一半 10.下列系统哪个属于全通系统( A )。

数字信号处理数字信号处理(Digital Signal Processing)数字信号处理是指将连续时间的信号转换为离散时间信号,并对这些离散时间信号进行处理和分析的过程。
随着计算机技术的飞速发展,数字信号处理在各个领域得到了广泛应用,如通信、医学影像、声音处理等。
本文将介绍数字信号处理的基本概念和原理,以及其在不同领域的应用。
一、数字信号处理的基本概念数字信号处理是建立在模拟信号处理基础之上的一种新型信号处理技术。
在数字信号处理中,信号是用数字形式来表示和处理的,因此需要进行模数转换和数模转换。
数字信号处理的基本原理包括采样、量化和编码这三个步骤。
1. 采样:采样是将连续时间信号在时间上进行离散化的过程,通过一定的时间间隔对信号进行取样。
采样的频率称为采样频率,一般以赫兹(Hz)为单位表示。
采样频率越高,采样率越高,可以更准确地表示原始信号。
2. 量化:量化是指将连续的幅度值转换为离散的数字值的过程。
在量化过程中,需要确定一个量化间隔,将信号分成若干个离散的级别。
量化的级别越多,表示信号的精度越高。
3. 编码:编码是将量化后的数字信号转换为二进制形式的过程。
在数字信号处理中,常用的编码方式有PCM(脉冲编码调制)和DPCM (差分脉冲编码调制)等。
二、数字信号处理的应用1. 通信领域:数字信号处理在通信领域中具有重要的应用价值。
在数字通信系统中,信号需要经过调制、解调、滤波等处理,数字信号处理技术可以提高信号传输的质量和稳定性。
2. 医学影像:医学影像是数字信号处理的典型应用之一。
医学影像技术如CT、MRI等需要对采集到的信号进行处理和重建,以获取患者的影像信息,帮助医生进行诊断和治疗。
3. 声音处理:数字信号处理在音频处理和语音识别领域也有广泛的应用。
通过数字滤波、噪声消除、语音识别等技术,可以对声音信号进行有效处理和分析。
总结:数字信号处理作为一种新兴的信号处理技术,已经深入到各个领域中,并取得了显著的进展。


数字信号处理数字信号处理(Digital Signal Processing,简称DSP)是一门研究数字信号的获取、处理和分析的学科。
数字信号处理在各个领域都有着广泛的应用,例如通信、音频和视频处理、图像处理等。
本文将从数字信号的获取、数字信号处理的基本原理以及数字信号处理的应用等几个方面进行论述。
一、数字信号的获取在数字信号处理中,数字信号的获取是非常重要的一步。
通常,我们通过模拟信号转换成数字信号进行处理。
这个过程包括了模拟信号的采样和量化两个步骤。
1. 采样采样是指将连续的模拟信号转换成离散的数字信号。
在采样过程中,我们将连续的信号在时间上进行等间隔地取样,得到一系列离散的采样值。
采样定理告诉我们,采样频率必须大于信号最高频率的两倍,这样才能保证信号在采样后的恢复。
2. 量化量化是指将连续的采样值转换成离散的数字量。
在量化过程中,我们对每个采样值进行近似处理,将其量化为离散的取值,通常使用有限个取值来表示连续的信号强度。
二、数字信号处理的基本原理数字信号处理的基本原理包括离散信号的表示和离散信号的处理。
1. 离散信号的表示离散信号是指在时间上是离散的,并且在幅值上也是离散的。
常用的离散信号表示方法包括时间序列和频率谱。
- 时间序列是离散信号在时间上的表示,通常由一系列采样值组成,可以看作是一个序列。
- 频率谱是离散信号在频率上的表示,可以将离散信号分解成一系列不同频率的正弦波成分。
2. 离散信号处理离散信号处理是指对离散信号进行一系列运算和变换,常见的包括滤波、频谱分析和信号重建等。
- 滤波是指对信号进行滤波器的作用,通常用于去除信号中的噪声或者增强希望的信号成分。
- 频谱分析是指对信号的频谱进行分析,常用的方法包括傅里叶变换和快速傅里叶变换等。
- 信号重建是指将经过处理的离散信号恢复成连续信号,常用的方法包括插值和重采样等。
三、数字信号处理的应用数字信号处理在多个领域都有着广泛的应用,下面以通信领域和音频处理领域为例进行介绍。



数字信号处理导言数字信号处理(DSP,Digital Signal Processing)是一门研究如何对信号进行数字化处理的学科。
信号可以是来自于声音、图像、视频等各种形式的波形。
数字信号处理在众多领域中都发挥着重要作用,包括通信、音频处理、图像处理等。
本文将介绍数字信号处理的基本概念、常用算法以及应用领域。
数字信号与模拟信号在数字信号处理中,信号可以分为模拟信号和数字信号。
模拟信号是连续的,可以在一定时间范围内取任意值;而数字信号是离散的,只能在特定时间点上取特定值。
数字信号通常是通过对模拟信号进行采样和量化得到的。
数字信号处理的基本概念采样和量化采样是将连续的模拟信号转换为离散的数字信号的过程。
采样频率决定了采样的频率,即每秒采样的次数。
采样频率过低可能导致信号失真,采样频率过高则会增加处理的复杂性和存储要求。
量化是将连续的信号幅度转换为离散的数值表示的过程。
量化级别越高,表示信号的精度越高,但也会增加存储要求。
傅里叶变换傅里叶变换是数字信号处理中广泛使用的算法,用于将信号从时域转换为频域。
傅里叶变换可以将信号分解为不同频率的正弦和余弦波的叠加,从而分析信号的频谱特性。
傅里叶变换的逆变换可以将频域信号转换回时域信号。
滤波滤波是数字信号处理中常用的操作,用于改变信号的频谱特性。
滤波可以分为低通滤波、高通滤波、带通滤波等不同类型。
低通滤波器可以通过去除高频成分来平滑信号,高通滤波器可以通过去除低频成分来突出信号中的细节。
时域和频域时域是指信号在时间轴上的表示,可以直观地显示信号的波形和幅度变化。
频域是指信号在频率轴上的表示,可以显示信号不同频率成分的强度。
时域和频域是相互转换的,通过傅里叶变换可以将信号从时域转换为频域,通过傅里叶逆变换可以将信号从频域转换回时域。
常用的数字信号处理算法离散傅里叶变换(DFT)离散傅里叶变换是将离散的时域信号转换为离散的频域信号的算法。
DFT可以将信号分解为不同频率的正弦和余弦波的叠加,从而分析信号的频谱特性。


数字信号处理什么是数字信号处理?数字信号处理(Digital Signal Processing,DSP)是一种广泛应用于信息处理的技术领域。
它涉及对以离散时间表示的信号进行获取、分析、变换和合成。
数字信号处理技术可以应用于音频、视频、图像、通信和控制等领域,从而提高信号质量、提取有用信息、实现实时控制等多种功能。
数字信号处理的基本原理数字信号处理的基本原理可以总结为以下几个步骤:1.信号获取:通过传感器、麦克风、摄像头等设备获取模拟信号或数字信号。
2.采样:将连续的模拟信号转换为离散时间信号,即将模拟信号在时间上进行等间隔采样。
3.量化:将采样后的信号的幅度值转换为有限数量的离散值。
4.编码:对量化后的信号进行编码,将其表示为二进制形式,方便在计算机中处理和存储。
5.数字信号处理算法:对编码后的数字信号进行一系列算法处理,包括滤波、频谱分析、变换等。
6.逆变换和解码:将处理后的数字信号转换回模拟信号,以便输出和使用。
数字信号处理的算法和技术在数字信号处理领域,有许多常用的算法和技术。
下面介绍几种常见的算法和技术:1. 滤波器滤波器是数字信号处理中常用的一种算法。
它用于改变信号的频率响应,滤除不需要的频率分量或增强需要的频率分量。
低通滤波器用于滤除高频成分,高通滤波器用于滤除低频成分,带通滤波器用于保留某一频率范围的信号成分。
2. 快速傅里叶变换(FFT)快速傅里叶变换是一种高效的频谱分析算法,它可以将信号从时域转换为频域。
通过傅里叶变换,可以对信号的频率分量进行分析,从而实现频谱分析、频域滤波等操作。
3. 信号压缩信号压缩是一种将信号表示为更紧凑形式的技术。
通过去除冗余信息和利用信号的统计特性,可以实现对信号的压缩和恢复。
4. 语音处理语音处理是数字信号处理中的一个重要应用领域。
它涉及到语音信号的获取、分析、合成和识别等方面。
语音处理技术可以用于语音识别、语音合成、语音增强等场景。
数字信号处理的应用数字信号处理技术在许多领域得到了广泛的应用,下面介绍几个典型的应用领域:1. 通信数字信号处理在通信领域中发挥了重要作用。
第八章(有限冲击响应)FIR DF 设计一个离散时间系统H(z)=B(z)/A(z),若分母多项式A(z)的系数a 1=…=a N =0,那么该系统即变成FIR 系统:n Mn n MM z b zb zb b z H -=--∑=+++=0110)(显然,系数b 0,b 1,…,b M 即是该系统的单位抽样响应h(0),h(1),…,h(M),且当n>M 时,h(n)≡0。
由于FIR 系统只有零点,因此不象IIR 系统那样容易取得较好的通带与带阻衰减特性。
要取得较好的衰减特性,一般要求H(z)的阶次要高,即M 要大。
但FIR 也有自己突出的优点,系统始终是稳定的,既易于实现线性相位,又允许设计多通带、多阻带的滤波器。
而这后两项都是IIR 系统不易实现的。
IIR DF 设计中借助于模拟滤波器、面向极点系统的设计方法并不适用于仅包含零点的FIR 系统,因此,FIR DF 的设计主要建立在对理想滤波器频率特性的某种近似基础上,这些近似方法包括窗函数法、频率抽样法和最佳一致逼近法等。
§8.1 FIR DF 的线性相位特征离散时间系统的频率响应包括幅频响应和相频响应,幅频响应反映信号x (n )通过该系统后各频率成分衰减的情况,而相频响应反映信号x (n )中各成分通过该系统后在时间上发生移位的情况。
一个理想的离散时间系统,除了具有所希望的幅频特性外,最好还能具有线性相位,这在诸如语音合成、波形传输等应用领域会带来极大的便利。
设一个离散时间系统的幅频特性为1,而相频特性具有如下线性相位:arg [H (e j ω)]=-k ω (3-1-4)其中k 为常数,该式表明系统的相移与频率成正比。
则当信号x (n )通过该系统后,其输出y (n )的频率特性为:ωωωωωωωωωjk eX j j eX j j jk j j j j j e e X e e X e e X e H e Y --===)](arg[)](arg[|)(||)(|)()()(所以,y (n )= x (n-k ),这样,输出y (n )等于输入在时间上的移位,达到了无失真传输的目的。
例:若x (n )=cos(ω0n )+ cos(2ω0n ),令H (e j ω)= e -jk ω,那么x (n )通过该系统后输出: y (n )= cos[ω0(n-k )]+ cos[2ω0(n-k )],x (n ),y (n )分别如图所示,二者仅在时间轴上移了k 个抽样周期。
若再次令|H (e j ω)|=1,而令:πωωωωππω≤<≤≤⎩⎨⎧--=2/32/304/)](arg[00j e H ;则输出y (n )为: y (n )= cos(ω0n-π/4)+ cos(2ω0n-π),如图c 所示,波形明显发生了失真。
若arg [H (e j ω)]==k ω+β (3-1-5)也称该相频特性为线性相位。
下面将要证明当h (n )=± h (N-1-n )时,FIR 滤波器具有线性相位,因为N 可以取奇数或偶数,所以共有四种情况: 1) 第一类FIR 滤波器,h (n )= h (N-1-n ),即h (n )偶对称当N 为奇数时,导,(3-1-5)则:)613()cos()()(2/)1(12/)1(--⎥⎦⎤⎢⎣⎡=∑-=--N n N j j n n a eeH ωωω,因此,H (e j ω)具有线性相位,即:arg [H (e j ω)]=- (N-1)ω/2 (3-1-7)其幅频特性具有低通特性。
当N 为偶数时,∑∑∑-=-=--=--+==112/)12/0)()()()(N n N N n nj N n jn nj j en h en h en h e H ωωωω;(3-1-8) 其中:b (n )=2h (N /2-n ) (3-1-9)相频特性不变,且幅频特性也是低通的。
2) 第二类FIR 滤波器,h (n )=- h (N-1-n ),即h (n )奇对称当N 为奇数时,这时因为h (n )以中心(N-1)/2为奇对称,所以必有:h [(N-1)/2]=0,经推c (n )=2h [(N-1)/2-n ], n =1,2,…,(N-1)/2;(3-1-10)相频特性为:arg [H (e j ω)]=- (N-1)ω/2+π/2 (3-1-11)当N 为偶数时,d (n )=2h (N /2-n ), n =1,2,…,N/2;(3-1-12)相频特性不变。
由以上讨论可知,当FIR DF 的抽样响应满足奇偶对称性时,滤波器具有线性相位。
当h (n )奇对称时,通过该滤波器的所有频率成分还会发生90°的相移,这将该信号先通过一个90°的相移器,然后再做滤波,由于这时它的幅频特性是正弦函数的组合,因此第二类FIR 滤波器的幅频特性近似于差分器的幅频特性,因此我们设计一般用途的滤波器时,h (n )多取偶对称,而长度N 则多取为奇数。
一、 全通滤波器与最小相位滤波器对于IIR 系统,单位抽样响应为无限长,很难满足线性相位的条件,h (n )=± h (N-1-n ),所以在实际工作中,经常用一个全通滤波器与已经设计好的IIR DF 相级联,在不改变幅频响应的情况下,对相位做某种校正,尽可能去近似线性相位。
1) 全通滤波器如果一个因果系统的幅频响应对于所有频率都等于1,或其它某个常数,即有:πωω≤≤=01|)(|j ap e H ;则称该系统H ap (z )为全通滤波器。
例如:z=λ处,而零点在z=1/λ处,极点与零点是以单位圆为镜像对称的。
可以证明,其幅频响应和相频响应分别为:一个二阶全通滤波器的转移函数为:λ为复数,且|λ|<1,显然它存在一对单位圆内的共轭极点,一对共轭零点与极点以单位圆为镜像对称。
将H ap (z )和原离散时间系统相级联,则原系统的幅频响应不变,而相频响应等于二者相加,这样可起到相位校正的目的。
当然,要校正到近似线性相位仍较为困难。
2)最小相位滤波器一个因果的、稳定的离散时间系统,其极点必须位于单位圆内,而对零点没有特殊要求。
如果一个离散系统的H (z )的极点与零点全部在单位圆内,则称该系统为最小相位系统。
而当全部零点都在单位圆外时则称为最大相位系统,而若在单位圆内外都有零点,则该系统称为混合相位系统。
最小相位系统具有以下重要性质:性质1:在一组具有相同幅频响应的因果的且稳定的滤波器中,最小相位滤波器对零相位的ω轴具有最小相位偏移。
性质2:令h (n )为所有具有相同幅频响应的离散时间系统的单位抽样响应,h min (n )为其中最小相位离散系统的单位抽样响应,并定义单位抽样响应的累积能量为:∞<≤=∑=M n h M E Mn 0)()(02,则∑∑==≥Mn Mn n h n h22min)()(;由Parseval 定理,因为幅频响应相同,所以时域的总能量也应相等。
但该性质指出,最小相位系统的抽样响应的能量集中在n 为较小值的范围内,即在所有具有相同幅频响应的离散系统中,最小相位离散系统的单位抽样响应h (n )具有最小的延迟,因此h min (n )也称最小延迟序列。
性质3:设H (z )是一个最小相位系统,H (z )可表示为:H (z )=| H (z )|e jarg[H (z )],令:)(ˆ)(ˆ)](arg[|)(|ln )(ln )(ˆz H j z H z H j z H z H z H IR +=+==, 则实部与虚部构成一对Hilbert 变换,即:此性质说明了最小相位系统的对数幅频特性与其相频特性的内在联系。
性质4:给定的一个稳定的因果系统:H (z )=N (z )/ D (z ),定义其逆滤波器:H IV (z )=1/ H (z ) = D (z ) / N (z ),当仅当H (z )是最小相位系统时,H IV (z )才是稳定的、因果的,且物理上可实现的。
性质5:任何一个非最小相位的因果系统的转移函数H (z )均可由一个最小相位系统和一个全通系统级联而成。
即:H (z )=H min (z )H ap (z ), §8.2 FIR DF 设计的窗函数法对于如图的理想低通数字滤波器,其频率特性为H d (e j ω),现在假定其幅频特性为| H d (e j ωh d (n)是以h d (0)为对称的sinc 函数,h d (0)= ωc /π。
我们早已指出,这样的系统是非因果的,因此在物理上不可实现。
但如果将h d (0)截短,比如仅取h d (-M/2),…,h d (0),…,h d (M/2),并将截短后的h d (n)移位,得:h(n)= h d (n-M/2), n=0,1,…,M (8-1-2) 则h(n)是因果的,且为有限长度M+1,令:)3.1.8()()(0∑=-=Mn nz n h z H ;可得所设计的滤波器的转移函数,H(z)的频率响应应近似H d (e j ω),而且是线性相位的。
因此以上讨论给出了一个基本可行的FIR DF 设计思路。
如指定H d (e j ω)的相频响应φ(ω)不为0,而令φ(ω)=-M ω/2,即φ(ω)具有线性相位,则(8-1-1)式可改写为:这样,h(n)是以n=M/2为对称的,为此,可取: h(n)= h d (n), n=0,1,…,M (8-1-5) 则由h(n)构成的H(z)和(8-1-3)式是一样的。
例1:设计一个FIR 低通滤波器,要求频率响应H d (e j ω)在0≤|ω|≤π/4之间为1,在π/4<|ω|≤π之间为0。
分别取M=10,20,40,观察其幅频响应特性。
解:由题意可知,)6.1.8(||4/04/||0)(2/⎩⎨⎧≤<≤≤=-πωππωωωjM j d e e H由(8-1-4)式,有:当M=10时,求得:h(0)=h(10)=-0.045,h(1)=h(9)=0,h(2)=h(8)=0.075 h(3)=h(7)=0.1592,h(4)=h(6)=0.2251,h(5)=0.25图8.1.2分别给出了M=10,20,40时的H d (e j ω)的幅频特性曲线,可以看出,当M 取不同值时H(e j ω) 以不同程度近似H d (e j ω),M 较小时,通频带过窄,阻带内纹波较大,且过渡带过宽;M 增大时,H(e j ω) 近似H d (e j ω)程度较好,即通频带接近π/4,阻带纹波小,过渡带变窄。
但应当注意到,当M 增大时,通带内出现纹波,并随M 的继续增大过程中,这种纹波并不消失,只是最大的上冲越来越接近间断点ωc ,这就是所谓的吉布斯(Gibbs)现象。