1液控履带起重机电气控制原理
- 格式:docx
- 大小:603.58 KB
- 文档页数:11
履带式起重机简介履带式起重机是一种利用履带进行行驶和位置调整的机械设备,常用于工地、码头等需要进行起重作业的场所。
它具有重量大、起重能力强、移动便捷、适应性广等特点。
本文将从结构、分类、工作原理、应用领域等方面对履带式起重机进行详细介绍。
结构履带式起重机主要由下述几个部分组成:•底盘:由履带、行走机构和转向机构组成。
•上部结构:包括动臂、起重机构、控制台等。
其主要功能是完成起重作业。
•控制系统:主要由电气控制设备、液压系统、气动系统、机械传动等组成。
分类根据功能和结构特点,履带式起重机可以分为多种类型,常见的有:履带起重机履带起重机是常见的履带式起重机种类之一,主要通过履带带动整机行走,具有构造简单、操作简便、使用方便等优点。
履带塔机履带塔机结构类似于塔吊,但将车轮更改为履带,从而实现了更大的移动范围和支撑面积。
履带塔机常用于建筑工地和道路施工。
履带式移动式起重机履带式移动式起重机通常由底盘、动臂、起重机构及控制系统组成。
具有移动迅速、起重能力大、适应性广等优点,广泛应用于港口、码头、桥梁等场所。
工作原理履带式起重机通过底盘的履带行走带动机械臂、起重机构、控制系统等部分进行工作。
其工作原理主要包括以下几个方面:•底盘行走原理:通过履带带动底盘前进和后退,也可实现机械臂的左右移动。
•机械臂工作原理:机械臂与起重机构通过液压系统进行联动控制,完成吊装、搬运等任务。
•控制系统原理:通过电气设备、液压系统、机械传动等相互联动,控制履带式起重机的操作。
应用领域履带式起重机适用范围广泛,主要应用于以下场所:•建筑工地:常用于大型建筑工地、高层建筑等场所,完成起重、装卸等任务。
•港口、码头:主要用于装卸、吊装、堆垛等任务,起重能力通常在几十至几百吨。
•道路施工:用于桥梁施工、道路维修等任务,通常在狭窄的施工场地中使用。
总之,履带式起重机具有移动灵活、起重能力强等优势,广泛应用于各种起重作业。
履带式起重机的结构和工作原理履带式起重机是一种用于运输和吊装重物的机械设备,它具有强大的起升能力和适应各种复杂地形的能力。
本文将详细介绍履带式起重机的结构和工作原理。
一、结构组成履带式起重机主要由起重机底盘和起重机臂组成。
1. 起重机底盘:起重机底盘由发动机、驾驶室、行走装置和操作装置组成。
发动机负责提供动力,驾驶室是驾驶员进行操作和控制的地方,行走装置包括履带、履带轨道和驱动系统,操作装置用于控制起重机的运行和吊装作业。
2. 起重机臂:起重机臂是起重机的主要工作部件,用于吊装和抓取重物。
起重机臂分为起重臂、平衡臂和配重臂等部分。
起重臂可进行伸缩和折叠,以适应不同高度和距离的吊装任务。
平衡臂用于平衡起重机在吊装时的重心,保持其稳定性。
配重臂用于增加起重机的起重能力。
二、工作原理履带式起重机的工作原理可以简单概括为以下几个步骤:1. 行走:首先由驾驶员操作起重机底盘的行走装置,通过控制履带的前进、后退和转向来使起重机移动到工作地点。
2. 准备:到达工作地点后,驾驶员停止起重机行走,然后进行起重机的稳定性调整。
这包括调节起重机的护腿或支撑桅杆,保证其平稳和牢固。
3. 吊装:调整好稳定性后,驾驶员在驾驶室内操作起重机的操作装置,通过控制起重臂的动作来完成吊装任务。
这包括起重臂的伸缩、折叠、上升、下降和旋转等动作,以便将重物吊起、移动和放下。
4. 完成:完成吊装任务后,起重机可以继续行走到下一个工作地点,或者返回起始地点。
三、应用领域履带式起重机在各个领域都有广泛的应用,特别适用于复杂地形和狭窄工作空间。
它可以用于建筑工地上的建筑物吊装,港口码头上的货物装卸,工厂厂区内的设备安装等。
它的起升能力大、运动灵活,可以满足各种复杂工况的需求。
总结:履带式起重机是一种重要的工程机械设备,它的结构复杂,工作原理精密。
了解履带式起重机的结构和工作原理对于操作和维护起重机具有重要意义。
通过合理使用履带式起重机,可以提高吊装效率,确保工程项目的顺利进行。
履带式起重机电气系统原理及关键技术大型履带起重机被广泛应用于搭建桥梁、安装发电设备、安装炼油设备、建设风力发电机以及建设海上工作平台等施工项目,但是在国内国外的履带式起重机占据市场主导地位,我国针对这样的现状制造了1350吨履带起重机,本文简单的介绍了它的配制系统和控制技术。
重点介绍了履带式起重机在安全检测系统方面的发展。
标签:履带式起重机;1350吨;安全监控;关键技术引言履带式起重机在我国有着较大的发展空间和市场潜力,被广泛应用于国民经济各领域的起重运输设备,因此搞清楚履带式起重机的配制系统和控制技术相当重要。
但是,每年在履带式起重机作业时发生的安全事故很多,为了保证安全生产,必须完善履带式起重机的安全监测系统,履带式起重机在安全监测方面的发展已经成为了现在发展的重要方向。
1、1350吨履带起重机1.1 配制系统。
以1350吨履带起重机为例,首先介绍一下整机的配制。
整机主要由4个部分组成,分别为下车系统、转台系统、臂架系统和超起系统。
其中每个系统又由好多部件组成。
其中下车系统一般由四轮一带、履带架、车架、连接横梁以及中间体等部分组成。
转台系统又包括前、后部转台、动力系统等。
臂架系统则主要包括主臂和副臂,副臂是塔式的,副臂还有前后撑杆,前后拉板。
至于超起重系统主要是指超起桅杆、超起撑杆、超起配重以及超起配重拉板等。
1350吨履带起重机是在保证起重机的基本功能完善、工况齐全、性能相当的前提下,结合自己公司的实际研发和制造情况,对产品进行整合优化而生产出来的起重机。
它参照了国外同类型起重机的设计思路,保留了国外产品的优点,加上它是根据实际设计、制造与使用情况设计,同时具备了自己独特的优点。
1350吨履带起重机可以通过安装多路换向阀来实现多个马达系统,这样就能实现单泵对多马达系统的设计。
1.2 控制技术。
这里主要介绍一下基于超起后拉板力矩检测的超起配重提升控制技术。
这里所说的超起主要是指臂架系统里的臂架式超起桅杆。
中大吨位履带起重机主要控制功能的实现原理1.发动机状态监控及控制1发动机状态监控系统通过J1939总线与发动机ECU进行通讯并获得发动机的状态数据,通过其他传感器采集发动机所没有的信息,如柴油液位等信息,显示器动态显示发动机各参数或状态,采用虚拟仪表显示。
发动机监控的主要内容包括:[1]发动机转速(rpm,CAN总线信号或通过在飞轮壳上外加转速传感器;[2]冷却水温度(℃,CAN总线信号;[3]冷却水液位(%,CAN总线信号;[4]机油温度(℃,CAN总线信号;[5]机油压力(kPa,CAN总线信号;[6]发动机工作小时(Hour,CAN总线信号;[7]燃油液位(%,上、下油位超限报警,通过外加可变电阻来实现。
一般特性满箱:180±5Ω,空箱:10±3Ω。
处理方法,再串一个100-150Ω左右的电阻即可,要考虑到端子的最大输入电流,不可超过这个电流值,如图1所示。
图1 油位传感器连接方法[8]发动机空气滤清器报警,CAN总线信号;[9]其他2发动机油门控制的方式(以TEREX-DEMAG5800为例[1]油门踏板控制a油门踏板(自复位给出的电压信号(最大0-5V,正常0.5-4.5V到主控制器,主控制器通过J1939总线控制发动机的转速。
此类型可以做功率极限载荷控制,转速通过控制器中转。
b油门踏板无操作时,发动机处于怠速状态,一般为600-800rpm。
[2]油门电位计控制a油门电位计(不复位给出的电压信号(最大0-5V,正常0.5-4.5V到控制器,主控制器通过J1939总线控制发动机的转速。
此类型可以做功率极限载荷控制,转速通过控制器中转。
b油门电位计无操作时:发动机处于当前电位计所处于状态,并一直保持此状态。
[3]自动油门a系统根据当前的主泵压力和手柄操作,计算系统所需功率,根据此功率控制发动机的转速,自动使发动机的转速和负载功率保持较好的匹配状态。
b在自动油门模式下,当油门踏板控制有效时,发动机的转速为油门踏板控制的转速和自动计算的转速较高值。
电控履带起重机电气控制原理1.电控系统的概念履带起重机的主要运行机构如起升、回转、变幅、行走等机构,这些机构中的泵、阀、马达的运行方式主要由电信号驱动的,而这些电信号可能有相当复杂的逻辑关系,需要经过可编程控制器控制的,则称此类履带起重机液压系统的控制为电控系统。
电控系统最明显的标志之一是有控制器的参与。
中大吨位的履带起重机一般采用电控系统,如100吨以上的系统,主要的目的在于简化电路通道,实现一些复杂的控制,如电磁阀的精确流量控制、制动器的延时制动、延时打开等功能,同时包括发动机的一部分控制,实现发动机特殊的功能。
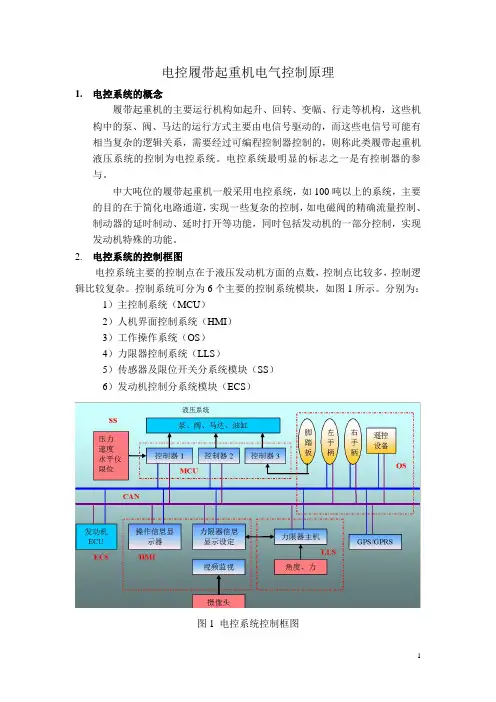
2.电控系统的控制框图电控系统主要的控制点在于液压发动机方面的点数,控制点比较多,控制逻辑比较复杂。
控制系统可分为6个主要的控制系统模块,如图1所示。
分别为:1)主控制系统(MCU)2)人机界面控制系统(HMI)3)工作操作系统(OS)4)力限器控制系统(LLS)5)传感器及限位开关分系统模块(SS)6)发动机控制分系统模块(ECS)图1 电控系统控制框图电控系统的核心为可编程的微控制器(MCU)和人机界面(HMI)。
MCU 与HMI通过CAN总线通讯,交换数据。
系统中的按钮、开关等部件提供开关量信号,电位器、传感器等提供模拟量信号,分别通过开关量及模拟量输入口进入MCU。
MCU经过内部计算处理后,通过输出口控制液压系统中的比例电磁阀、开关电磁阀及指示装置等。
操作者可通过HMI的显示屏查看起重机的各项工作参数,并通过HMI上的按键配合显示菜单来输入设定参数。
3.典型电气布置图简介以DEMAG起重机为例,其电气系统多采用分-主-分的分布方式,如图2所示。
所有控制器都放置于驾驶室电气柜内,然后在转台、下车、臂架等部位布置多个分线盒,实现电气元器件从分散到集中于最近的分线盒,分线盒再到驾驶室实现分线,线路简单明了,很值得我们设计借鉴。
图2 分-主-分式系统与之相比,国产履带起重机采用大多是集中式的设计,转台、臂架上的所有元件都从电气元件本体直接连接到驾驶室内,导致驾驶室尾部出口处的线缆特别“粗壮”,当驾驶室进行旋转或俯仰动作时,就可能对线缆产生破坏性影响;同时进入驾驶室的线束太多,导致驾驶室电气柜“臃肿不堪”,更增加了分线的难度。
应用与维修184工程机械与维修 CM&M 2013.09超大吨位履带起重机采用单卷扬机构缺点有3点:一是要求所配起升钢丝绳倍率较大,长度较长;二是要求卷扬机滚筒体积较大,从而给卷扬机构布置带来困难;三是会使卷扬机滚筒上的钢丝绳层数过多,易于造成钢丝绳挤压和磨损。
因此,超大吨位履带起重机大多采用2台卷扬机同步起升。
采用2台卷扬机起升时,若2台卷扬机不同步,可能造成吊钩倾斜、钢丝绳脱离滑轮、滑轮损坏等故障,甚至会导致安全事故。
因此,采用2台卷扬机起升必须设置同步机构。
当卷扬同步机构有故障造成起升不同步时,要立即停机进行排查。
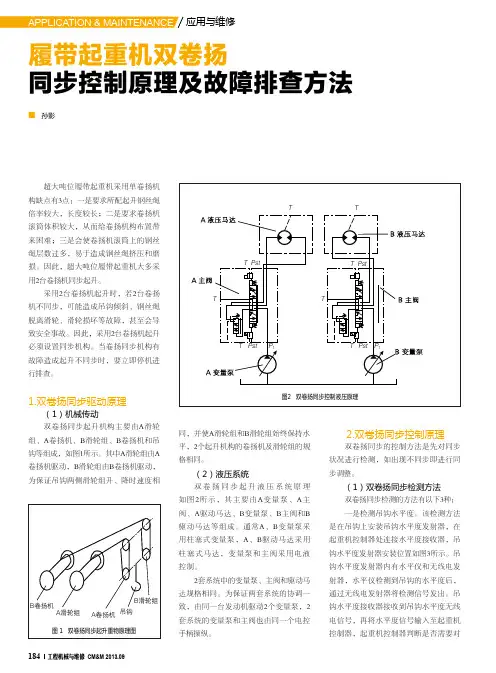
1.双卷扬同步驱动原理(1)机械传动双卷扬同步起升机构主要由A滑轮组、A卷扬机、B滑轮组、B卷扬机和吊钩等组成,如图1所示。
其中A滑轮组由A 卷扬机驱动,B滑轮组由B卷扬机驱动,为保证吊钩两侧滑轮组升、降时速度相履带起重机双卷扬同步控制原理及故障排查方法■ 孙影同,并使A滑轮组和B滑轮组始终保持水平,2个起升机构的卷扬机及滑轮组的规格相同。
(2)液压系统双卷扬同步起升液压系统原理如图2所示,其主要由A变量泵、A主阀、A驱动马达、B变量泵、B主阀和B 驱动马达等组成。
通常A、B变量泵采用柱塞式变量泵,A、B驱动马达采用柱塞式马达,变量泵和主阀采用电液控制。
2套系统中的变量泵、主阀和驱动马达规格相同。
为保证两套系统的协调一致,由同一台发动机驱动2个变量泵,2套系统的变量泵和主阀也由同一个电控手柄操纵。
2.双卷扬同步控制原理双卷扬同步的控制方法是先对同步状况进行检测,如出现不同步即进行同步调整。
(1)双卷扬同步检测方法双卷扬同步检测的方法有以下3种:一是检测吊钩水平度。
该检测方法是在吊钩上安装吊钩水平度发射器,在起重机控制器处连接水平度接收器,吊钩水平度发射器安装位置如图3所示。
吊钩水平度发射器内有水平仪和无线电发射器,水平仪检测到吊钩的水平度后,通过无线电发射器将检测信号发出。
履带式起重机的组成及工作原理一、履带式起重机概况履带式起重机是在行走的履带式底盘上装有行走装置、起重装置、变幅装置、回转装置的起重机。
履带式起重机有一个独立的能源,结构紧凑、外形尺寸相对较小,机动性好,可满足工程起重机流动性的要求,比较适合建筑施工的需要,达到作业现场就可随时技入工作。
履带式起重机按传动方式不同,可分为机械式、液压式和电动式三种。
其中,机械式又分为内燃机一机械驱动和电动一机械驱动两种。
目前,工程起重机通常采用以下复合驱动方式:内燃机一电力驱动内燃机一电力驱动与外接电源的电力驱动的主要区别是动力源不同,前者采用独立的内燃机作动力源,后者外接电网电源。
内燃机一电力驱动通常是由柴油机驱动发电机发电,把内燃机的机械能转化为电能,传送到工作机构的电动机上,再变为机械能带动工作机构运转。
内燃机一液压驱动内燃机一液压驱动在现代工程起重机中得到了越来越广泛的应用,主要原因一是柴油发动机机械能转化为液压能后,实现液压传动有许多优越性,二是由于液压技术发展很快,使起重机液压传动技术日趋完美。
二、履带式起重机的组成部分如下图所示,履带式起重机主要由下列几部分组成。
1. 取物装置履带式起重机的取物装置主要是吊钩(抓斗、电磁吸盘等作为附属装置)。
2. 吊臂用来支承起升钢丝绳、滑轮组的钢结构,它可以俯仰以改变工作半径。
它直接装在上部回转平台上。
吊臂可以根据施工需要在基本吊臂基础上接长。
在必要时,还可在主吊臂的顶端装一吊臂,扩大作业范围,这种吊臂称副臂。
3. 上车回转部分它是在起重作业时可以回转的部分包括装在回转平台上除吊臂、配重、吊钩等以外的全部机构和装置。
4. 行走部分它是履带式起重机的下部行走部分,是履带式起重机的底盘,同时也是上车回转部分的基础。
主要有履带、驱动轮、导向轮、支重轮、上托轮、行走马达、行走减速箱、履带张紧装置、履带伸缩油缸等组成。
5. 回转支承部分它是安装在下车底盘上用来支承上车回转部分的,包括回转支承装置的全部回转、滚动和不动的零部件和用来固定回转支承装置的机架等(不包括四转小齿轮)。
履带起重机的工作原理
履带起重机的工作原理主要包括以下几个部分。
首先是行走系统,通过履带来实现起重机的移动。
履带由游丝、脚板、链轮、驱动轮等组成,通过驱动轮带动链轮的旋转,使履带在地面上移动。
其次是起重系统,起重系统主要包括起重机的臂架、起重钩、钢丝绳、液压系统等。
液压系统可以控制起重臂架的伸缩以及起重钩的上下运动。
通过液压系统的控制,可以实现起重物体的吊起、放下、移动等操作。
再次是驱动系统,驱动系统主要包括起重机的发动机、液压泵、液压马达等。
发动机提供动力,液压泵将发动机产生的动力转化为液压能,并通过液压马达驱动各个液压执行器。
最后是控制系统,通过控制系统来对起重机的各个操作进行控制。
包括遥控器、按钮控制等方式,通过控制液压系统的液压阀来控制起重机的行走、起重等动作。
总的来说,履带起重机通过驱动系统提供动力,通过液压系统控制起重机的臂架伸缩、起重钩运动等,通过控制系统来对起重机的各个操作进行控制,从而实现起重机的工作。
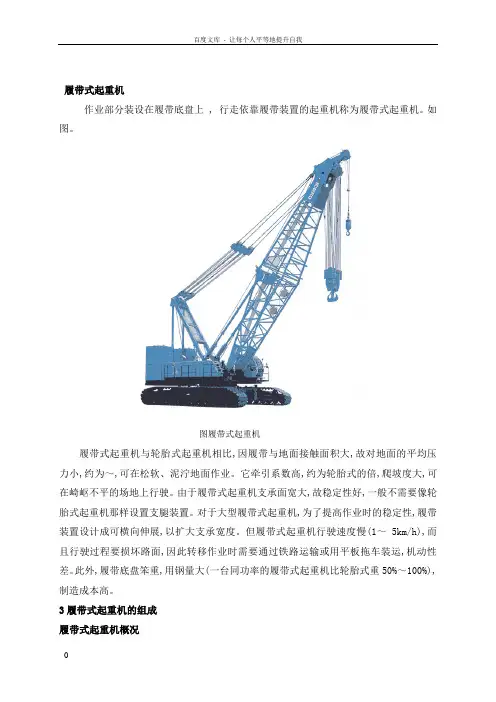
履带式起重机作业部分装设在履带底盘上 , 行走依靠履带装置的起重机称为履带式起重机。
如图。
图履带式起重机履带式起重机与轮胎式起重机相比,因履带与地面接触面积大,故对地面的平均压力小,约为~,可在松软、泥泞地面作业。
它牵引系数高,约为轮胎式的倍,爬坡度大,可在崎岖不平的场地上行驶。
由于履带式起重机支承面宽大,故稳定性好,一般不需要像轮胎式起重机那样设置支腿装置。
对于大型履带式起重机,为了提高作业时的稳定性,履带装置设计成可横向伸展,以扩大支承宽度。
但履带式起重机行驶速度慢(1~ 5km/h),而且行驶过程要损坏路面,因此转移作业时需要通过铁路运输或用平板拖车装运,机动性差。
此外,履带底盘笨重,用钢量大(一台同功率的履带式起重机比轮胎式重50%~100%),制造成本高。
3履带式起重机的组成履带式起重机概况履带式起重机是在行走的履带式底盘上装有行走装置、起重装置、变幅装置、回转装置的起重机。
履带式起重机有一个独立的能源,结构紧凑、外形尺寸相对较小,机动性好,可满足工程起重机流动性的要求,比较适合建筑施工的需要,达到作业现场就可随时技入工作。
履带式起重机的组成部分如下图所示,履带式起重机主要由下列几部分组成。
图履带式起重机3.2.1取物装置履带式起重机的取物装置主要是吊钩(抓斗、电磁吸盘等作为附属装置)。
吊臂用来支承起升钢丝绳、滑轮组的钢结构,它可以俯仰以改变工作半径。
它直接装在上部回转平台上。
吊臂可以根据施工需要在基本吊臂基础上接长。
在必要时,还可在主吊臂的顶端装一吊臂,扩大作业范围,这种吊臂称副臂。
上车回转部分它是在起重作业时可以回转的部分包括装在回转平台上除吊臂、配重、吊钩等以外的全部机构和装置。
行走部分它是履带式起重机的下部行走部分,是履带式起重机的底盘,同时也是上车回转部分的基础。
主要有履带、驱动轮、导向轮、支重轮、上托轮、行走马达、行走减速箱、履带张紧装置、履带伸缩油缸等组成。
回转支承部分它是安装在下车底盘上用来支承上车回转部分的,包括回转支承装置的全部回转、滚动和不动的零部件和用来固定回转支承装置的机架等(不包括四转小齿轮)。
履带式起重机构造、原理履带式起重机构造、原理摘要:履带起重机是⼴泛应⽤于国民经济各领域的⼀种起重设备,国内在⼤吨位产品的⾃主开发⽅⾯还是个空⽩,⽬前仅有两个⼚家引进国外70年代末的技术有少量的⽣产,⼤部分市场还是由国外产品占领。
履带起重机接地⾯积⼤,通过性好,适应性强,可带载⾏⾛,可进⾏挖⼟、夯⼟、打桩等多种作业。
机动灵活,不象固定式起重机那样需要安装和调试。
但因⾏⾛速度缓慢,转移⼯地需要其他车辆搬运。
本⽂概述述了起重机的分类,简要说明了履带起重机的各个部分及其⼯作原理,详细介绍了履带起重机的回转,卷扬(提升),⾏⾛液压系统⼯作原理。
关键词:履带吊回转卷扬⾏⾛液压系统The Principle Of Hydraulic System Of Crawler CraneAbstract:In china there’s a blank in the development of the large crawler crane, which is a important device widely used in different fields. At present, only two companies which introduce foreign technology of the end of 1970 product some crawler cranes and the most part of the market is in the hands of other countries. The crawler crane take a large area with ground, has a strong adaptability, can be widely used,and can go with a lifting ,in addition,it can ekcacate,tamp,pile and so on. It’s more flexible, not need to be installed and adjusted. But it goes slowly, no wander it needs a car to help with it to go.This paper simply show you the categories of crane, the principle of different parts of the crawler crane. And it is detailed in the hydraulic systems of gyration, lifting, going.Key words: crawler crane 、gyration、 lifting、 going、 hydraulic system⽬录1引⾔-----------------------------------------------------------------(4)2⼯程起重机的分类-----------------------------------------------------(4) 2.1轮胎式起重机----------------------------------------------------(4) 2.2塔式起重机------------------------------------------------------(5) 2.3龙门起重机------------------------------------------------------(5) 2.4门座起重机------------------------------------------------------(6) 2.5桥式起重机------------------------------------------------------(6) 2.6履带式起重机----------------------------------------------------(6)3履带式起重机的组成----------------------------------------------------(7) 3.1履带式起重机概况------------------------------------------------(7)3.2履带式起重机的组成部分------------------------------------------(8)3.3履带式起重机各部分⼯作原理-------------------------------------(10)4 回转液压系统---------------------------------------------------------(12)4.1 回转液压回路⽤-------------------------------------------------(13)4.2 回转作⽤-------------------------------------------------------(14)4.3 平衡作⽤-------------------------------------------------------(15)4.4 回转控制阀-----------------------------------------------------(15)4.4.1控制阀的⼯作原理-----------------------------------------(15)4.4.2回转制动阀的作⽤----------------------------------------- (16) 5卷扬液压系统⼯作原理-------------------------------------------------(18)5.1马达旋转回路--------------------------------------------------- (19)6 ⾏⾛液压系统---------------------------------------------------------(21)6.1 液压泵控制-----------------------------------------------------(22)6.1.1 ⽅向控制-------------------------------------------------(22)6.1.2 车速控制-------------------------------------------------(22)6.1.3 微动控制-------------------------------------------------(22)6.1.4 ⾼压切断控制---------------------------------------------(22)6.2 液压马达控制---------------------------------------------------(22)7结论-----------------------------------------------------------------(23)8参考⽂献-------------------------------------------------------------(25)1引⾔⼯程起重机是被⼴泛地应⽤于各种物料的起重、运输、装卸、安装和⼈员输送等作业中现代⼯业⽣产不可缺少的设备。
履带式起重机是在行走的履带式底盘上装有行走装置、起重装置、变幅装置、回转装置的起重机。
履带式起重机有一个独立的能源 ,结构紧凑、外形尺寸相对较小 ,机动性好,可满足工程起重机流动性的要求,比较适合建造施工的需要 ,达到作业现场就可随时技入工作。
履带式起重机按传动方式不同,可分为机械式、液压式和电动式三种。
其中,机械式又分为内燃机一机械驱动和电动一机械驱动两种。
目前,工程起重机通常采用以下复合驱动方式 :内燃机一电力驱动内燃机一电力驱动与外接电源的电力驱动的主要区别是动力源不同 ,前者采用独立的内燃机作动力源 ,后者外接电网电源。
内燃机一电力驱动通常是由柴油机驱动发电机发电,把内燃机的机械能转化为电能 ,传送到工作机构的电动机上 ,再变为机械能带动工作机构运转。
内燃机一液压驱动内燃机一液压驱动在现代工程起重机中得到了越来越广泛的应用 ,主要原因一是柴油发动机机械能转化为液压能后 ,实现液压传动有许多优越性 ,二是由于液压技术发展很快,使起重机液压传动技术日益完美。
如下图所示,履带式起重机主要由下列几部份组成。
履带式起重机的取物装置主要是吊钩(抓斗、电磁吸盘等作为附属装置)。
臂,扩大作业范围,这种吊臂称副臂。
它是在起重作业时可以回转的部份包括装在回转平台上除吊臂、配重、吊钩等以外的全部机构和装置。
它是履带式起重机的下部行走部份 ,是履带式起重机的底盘 , 同时也是上车回转部份的基础。
主要有履带、驱动轮、导向轮、支重轮、上托轮、行走马达、行走减速箱、履带张紧装置、履带伸缩油缸等组成。
它是安装在下车底盘上用来支承上车回转部份的 ,包括回转支承装置的全部回转、滚动和不动的零部件和用来固定回转支承装置的机架等(不包括四转小齿轮)。
配重是安装在起重机回转平台尾部的具有一定形状的铁块 , 目的是确保起重机能稳定地工作。
在必要时,这些铁块可以卸下后单独搬运。
动力装置即为动力源。
在履带式起重机上 ,大部份动力装置为四冲程柴油发动机。
履带式起重机行走机构故障分析及修复履带式起重机是一种依靠履带装置行走的移动式起重机械,依靠其独特的行走机构,使起重机具有带载行驶、接地比压小、爬坡能力强、转弯半径小等特点,行走机构的动态特性,直接影响着履带起重机整车的性能。
在平常的使用中常常出现走行跑偏的现象,使操作起重机的工作效率大打折扣。
为了解决这一问题,本文针对一个故障排查的实例来对整机液压系统进行探讨研究,加以AMESim为平台进行仿真分析,并提出一些日常使用中的建议。
1工作原理该起重机行走液压系统采用双泵、双马达结构,即左、右行走机构各有1个变量泵、1组控制主阀和I个变量马达,各自独立驱动。
以右侧为例:右控制主阀为力士乐MO-5205-00/4M0型电液控制阀。
该阀为四联阀,分别控制右侧履带的行走、主变幅机构、主钩和副钩。
压力油通过右控制主阀的右行走阀片后进入中心回转接头,再通过胶管及快换接头连接到右侧行走变量马达,将动力传递到右侧行走马达。
左侧与右侧相同。
2故障原因分析2.1磨损原因行走机构的机械部件承担自重、作业载荷及运行中的冲击载荷,还要受到砂石、泥水的污染侵蚀,工作条件恶劣,易被磨损。
从行走机构的结构分析,引导轮、支重轮和驱动轮三者的轴线必须和支重轮架的对称中心线重合,该中心线与起重机的半轴轴线垂直,才能保证履带吊直线行走,但驱动轮、托轮、引导轮及支重轮的轮齿磨损,轴承轴套、轴磨损及变形,使驱动轮、引导轮、支重轮与轨链发生啃削,严重时发生履带跑偏、脱轨,进一步加剧这些零部件的磨损,造成恶性循环。
1)土壤、砂石等不利外部环境对磨损的影响。
土壤和砂石对行走机构的影响主要体现在土壤的酸碱度和砂石的硬度、形状上,酸性土壤、带有锐角的碎石、硬度大的砂石等对零部件的腐蚀和磨损较为严重。
2)零部件之间压力及润滑的影响。
在相同材质下,磨损量与作用在零部件上的压力成正比,单位压力越大,磨损量也越大。
因此应尽量避免过大的单位压力。
缺少润滑使零件直接接触,加剧磨损的产生。
大吨位履带吊风险源辨识及检查预防摘要:大吨位履带起重机具有一次性吊载大、倾覆风险大、发生事故后造成后果大的特点。
本文通过对大吨位履带起重机的风险源的挖掘,建立该类设备的检查和预防机制,为该类设备的风险评估提供一定的参照,保障了设备的安全运行。
关键词:履带起重机风险源预防0前言履带起重机对减轻劳动强度,加快工程建设进度,提高工程质量,实现施工工程的机械化、标准化、模块化起到了至关重要的作用。
然而该类设备的应用越来越广泛,危险性在逐渐增大,一旦发生事故造成的影响和损失巨大。
本文通过对大吨位履带起重机工作特性的分析,对其在工作中的危险源进行辨识,提出相应的预防措施,希望能为大吨位履带起重机的使用单位制定安全技术规范提供一定的借鉴。
1 履带吊工作特性履带起重机是特种设备的一种,它主要由下车、上车、臂架系统这三部分组成。
下车主要包括车架、连接梁、履带架、行走机构、配重、履带等;上车包括转台、桅杆、起升机构、变幅机构、回转机构等部分,臂架系统主要包括主臂、副臂等。
一般来说履带起重机随着其最大额定起重量的增大,自身的重量将不断增加,因此下车结构的强度和刚度决定了履带起重机整机的安全性和可靠性。
另外大吨位履带起重机装备有力矩限制器、转台回转锁销装置、起重臂防后翻装置、起升高度限位装置、风速仪、水平仪、液压系统的溢流阀、平衡阀、双向液压锁、回转警告、行走警告、安全监控管理系统(200t以上)等安全保护装置[1]。
大吨位履带起重机的动力装置基本为柴油发动机,通过内燃机把机械能转化为液压能,再经过液压管路和各种阀把液压能传递给液压油缸和液压马达,驱动各机构工作,实现臂架的变幅、回转机构的回转、吊钩的起升以及行走机构的行走见图1。
图1 履带起重机液压控制系统原理图以图1所示履带起重机液压系统为双变量系统,即液压泵及马达均具有变量功能,该系统具有速度调节大、工作效率高、节能等优点[2]。
该系统主要针对的工况有:a、静止带载工况,在该工况下负载可以在任意位置安全停留;b、负载上升工况,在该工况下,液压油驱动液压马达带动负载上升,此时需要控制液压泵的排量的排量来控制上升速度,达到无级变速;c、负载下落工况,该工况由于负载运动的方向与重力的作用方向相同,液压马达会被重物拖动而进行旋转运动,故该工况存在特殊的不稳定性,为实现对负载下放过程的安全控制、增加系统稳定性,液压系统需要利用平衡阀作为节流控制元件来中和重物的势能。
液控履带起重机电气控制原理
1. 液控系统的概念
履带起重机的主要运行机构如起升、回转、变幅、行走等机构,如果这 些机构中的泵、阀、马达的运行方式不是主要由电信号驱动的,而是由先导 比例液压驱动主阀或者由手动直接驱动主阀阀芯而改变液压回路的系统,
则
称此类履带起重机的液压系统为先导液压控制系统或者简称为液控系统。
手动直接驱动主阀阀芯的部分原理图如图 1所示,为一个小吨位汽车吊 的原理图。
主阀的放大图如图2所示。
这类一般用于小吨位起重机产品,如 20吨以下汽车起重机等。
-1-
r ----- ; --- 1
图1小吨位汽车吊原理图
n|--rFH
十
L..
r
\<
1
|_
\ I ---------
回转
I
起升
变幅
2
si
i i —+
主阀
图2手动阀原理图
先导比例液压控制的典型原理图如图 3所示。
一般用于小吨位汽车吊和履带 吊,如50-100吨左右。
它的主要特点之一就是主机构的油路的改变采用先导油 压进行控制,因此,手柄的驱动力可以很小。
电控系统指的是在对液压系统的控制过程中,泵、阀或马达等机构采用的是 电信号控制。
泵可以是电比例变量泵,电信号的大小直接控制泵排量的大小; 阀 可以是开关阀也可以是比例阀,马达也一样。
图4是一种电控开关主阀的原理图, 图5是一种电比例控制的马达原理图。
图5电控开关主阀的原理图
图3先导比例液压控制原理图
y 一 _____
电制动阀
图6电比例控制的马达原理图
2. 液控系统的控制框图
由于相关的电气控制点比较少,控制逻辑也比较简单,因此,电气控制的主 要方面有力限器的控制和相关信息的显示说明等。
对液控的履带起重机进行分析,可以将电气系统分成如下几部分: 1) 人机界面:包括各类的显示灯、组合仪表、视频系统等; 2) 安全限制装置:包括力限器系统、限位开关、传感器等; 3) 工作操作装置:包括手柄、脚踏板、遥控器等; 4) 执行装置:包括各类开关、继电器、灯具等电器元件。
整车控制系统的框图如图7所示。
力限器系统是整车安全运行的核心,实时计算整车的力矩限制参数,并显示 实际载荷和额定载荷,给出超载或超角度的限制信号给电气系统, 电气系统再切 段相应的危险回路。
如果是超载,则切段向下变幅和起升动作。
如果是超角度, 则切段向上变幅动作。
各类安全限位及传感器的信号输入到组合仪表, 进行显示和报警,包括液压 系统的参数如压力、发动机系统的参数如转速、机油压力等,还包括卷扬的三圈 保护限位、吊钩高度限位等。
这些限位信号经过继电器的电流开关控制作用, 对
起升马达
马达排量调节比例阀
ra
电平衡阀
az
I:
相应的电磁阀进行控制。
具体的控制流程举例如图8所示,为一个力限器超载后
的控制过程 安全限位
继电器逻辑控制
厂.—— — — — — —一_— —_ 一 - L —— _ ——a — 一-
力限器 显示设定
.组合仪表
显示设定 HMI
视频监视器
力角传感器
摄像头
图7液控系统控制框图
正常,继电器没电,电磁阀得电,动作正常
力限器 主机
-+^4 V
“ 87 i 竺7 87 85 ,
,86
A —
继电器2
87
MM
85^86
1 ■"
继电器
1 起升电磁阀
F 变幅电磁阀
强制开关
超载,继电器得电,电磁阀失电,动作停止
85
86
强制,继电器失电,电磁阀得电,动作正常。
强制开关
图8力限器超载后的控制原理
3. 典型的电气原理图介绍
液控系统的电气原理图需要对电气控制的所有元件进行描述和表达, 并表征 每个元件之间的连接关系。
典型的小吨位履带起重机的部分原理图如附图 1所
示。
电气原理图分析,可以看见电气原理可分为以下几个部分:
发动机部分:主要负责发动机的供电、电动机等的连接,如附图1右下部分; 电源部分:大部分回路采用单独的片式保险丝供电;
照明部分:这个部分是比较多的一部分,包括臂架、转台、驾驶室等的照明 及报警灯等,如附图1的左下部分;
液压控制部分:主要是对几个必须的电磁阀的控制, 如泵的排量控制、棘轮 的控制等,采用开关控制继电器,由继电器驱动电磁阀,见附图
1的上半部分;
力限器部分:主要对切断危险动作回路的几个电磁阀进行控制, 如附图1的 下半中间部分,包括力传感器和角度传感器的连接等。
整车电气布置一般采用集中式布置, 将所有的仪表、电源保险等电气元件集 中放置于驾驶室的电气柜内,方便维修和检查。
4. 主要元件介绍
1)操作手柄,见图9所示,液压先导手柄,控制主要的动作,包括起升、 变幅、行
走、回转等,在设计和布置上需要遵循一定的标准,如图 10
所示。
继电器
1
起升电磁阀
85
—86
力限器 主机
继电器
2
,87 30
87 F 变幅电磁阀
③制动踏板[4]
司机位盘
图10标准规定的手柄方向
2) 脚踏板,用于控制发动机油门,如图11所示。
由于一般采用的是机械式 发动机,油
门驱动采用机械拉杆式。
油门踏板与拉杆之间采用钢丝连接。
起升2
{副臀变幅〉<8. 2.1)
起升1
(& 2. 2)
下降
回转2.1)
变關(8,2. 2)起升
起升
下降
起升
起升
图9液压先导手柄
3)遥控器,通过开关盒与电缆连接至起重机来操作执行机构动作,要求面对动作机构来操作,使用完毕将其收起,使用完毕后将机构锁止。
主要用于自装拆的相关电磁阀的控制,如支腿油缸升降控制、履带安装油缸等。
这个在设计上可以是可选件,在驾驶室内也可以做,遥控器的设计主要是方便操作人员近距离观察和接触操作元件,更加安全和可靠;如图12所示。
图12遥控系统
4)力矩限制器系统,由力传感器、角度传感器、主机及显示器组成一个完整的一个系统。
主机将力信号和角度信号进行一定的运算,得到当前的幅度和臂长情况下的真实载荷值,然后与已经存储于主机内的额定载荷
值进行比较,得到载荷率,并输出相应的显示信息,如95%黄色预警,
100%超载红色报警信息等,通过输出开关量信号给电气系统,然后电气系统切段相应的电磁阀来控制动作的执行,基本过程如图13所示。
< 90%正常运行
90%^ 100%声音报警
> 100%切断危险动作回路
图13力限器动作基本过程
5)多功能组合仪表主要用于显示发动机参数、其他安全限位信息等,如图14所示。
可以代替以前普遍使用的压力表、报警灯等,将大部分的信息集中显示到一个仪表盘上,简化了安装和设计,有利于模块化设计。
图14多功能组合仪表
6)安全装置介绍:
[1]力限器超载控制,如上述的力限器功能,力限器系统会在后面有一章详细的专门
介绍。
[2]臂架上限位,防后倾控制,防止臂架的后倾,绝大部分汽车吊由于采用的是油缸
变幅,因此不涉及臂架后倾的问题,但是履带起重机由于是钢丝绳变幅,因此必须在臂架的根部设置防后倾油缸顶着臂架,防止后倾。
小吨位一般采用弹簧缸,性能一般;中大吨位一般采用油缸防后倾,可以在液压油路中进行设计,使防后倾的力量可调。
弹簧缸的图片如图15所示,油缸的如图16所示。
图15弹簧缸防后倾装置
图16油缸防后倾装置
[3]主钩、副钩过卷控制,防止吊钩碰到臂架头部,损坏臂架,如图17
所示;
图17防过卷开关与重锤
[4]三圈保护控制,防止卷扬过放,如图18所示;
图18三圈保护装置的安装位置
[5]车体水平监控,让驾驶员注意不能工作在倾斜度太大的平面上。
[6]环境风速监控,国家标准规定,臂架超过50米必须安装风速仪,只允许在
风速允许范围内工作,最大允许工作风速在6级风(10.8-13.8 米/秒),否
则将会发生危险。
风速仪的安装一般在臂架最高点。
5.设计流程
1)明确设计要求,对液压系统进行分析,总结需要控制的液压系统点,如主要是电磁阀的控制;
2)对整车的电路走线和元件进行设计和选择,包括分线盒、电缆、元件等;
3)对整车的控制电路和常规电路进行设计,包括灯具、继电器等;
4)出电气原理图接线图。
6.特点
1)国产化
2)经济型
3)精细化
11。