起重机电气控制系统习题参考
- 格式:doc
- 大小:511.87 KB
- 文档页数:8
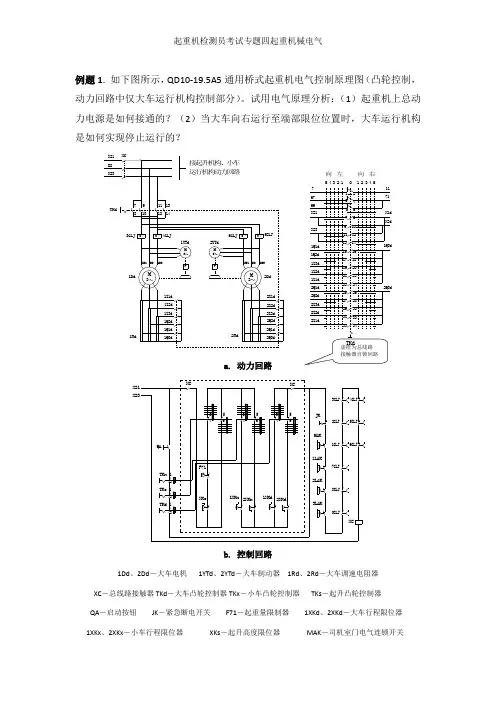
例题1. 如下图所示,QD10-19.5A5通用桥式起重机电气控制原理图(凸轮控制,动力回路中仅大车运行机构控制部分)。
试用电气原理分析:(1)起重机上总动力电源是如何接通的?(2)当大车向右运行至端部限位位置时,大车运行机构是如何实现停止运行的?>I >I >I >I M3M3PM31D3D22D32D11D12Z1d 2Z2d 2Z3d 2Q2d 2Q1d2Q0d1Q0d1Q1d1Q2d 1Z3d 1Z2d 1Z1d 7891011121314TKd1Rd2Rd3GLJ4GLJ5GLJ6GLJD21YTd1DdXCM32YTdP2DdX21D2X2312345012345123456789101112131415161718192021222324向 右向 左252627282930313233342Q1d2Q2d 2Z3d 2Z2d 2Z1d2Q0d 1Q1d 1Q2d1Z3d 1Z2d1Z1d 1Q0d X1d X3d 711716769X21X23TKd接起升机构、小车运行机构动力回路a. 动力回路b. 控制回路1Dd 、2Dd -大车电机 1YTd 、2YTd -大车制动器 1Rd 、2Rd -大车调速电阻器XC -总线路接触器TKd -大车凸轮控制器TKx -小车凸轮控制器 TKs -起升凸轮控制器QA -启动按钮 JK -紧急断电开关 F71-起重量限制器 1XKd 、2XKd -大车行程限位器 1XKx 、2XKx -小车行程限位器 XKs -起升高度限位器 MAK -司机室门电气连锁开关虚框为总线路接触器自锁回路1LAK、2LAK、3LAK-大车走台、端梁栏杆门电气连锁开关3GLJ、4GLJ、5GLJ、6GLJ-大车过电流继电器1GLJ、2GLJ-小车过电流继电器7GLJ、8 GLJ-起升过电流继电器0GLJ-总过电流继电器电气控制原理图参考答案:(1)合上起重机总馈电端的断路器,并将大车凸轮控制器TKd、小车凸轮控制器TKx、起升凸轮控制器TKs均置于零位。
第4章桥式起重机习题答案1.填空题1)20/5t起重机是指(主钩的额定起重量为20t,副钩的额定起重量为5t)。
2)桥式起重机通电持续率为(工作时间与周期时间)之比,一般一个周期为(10min),标准的通电持续率规定一般为(15%、25%、40%、60%)四种。
通电持续率反映了起重机的工作繁重程度,用(FC)表示。
3)(起重量、运行速度和工作类型)是桥式起重机最重要的3个参数。
4)起重机按其载荷率和工作繁忙程度可分为(轻级、中级、重级和特重级)四种工作类型。
5)普通的起重机调速范围一般为(3:1),要求较高的则要达到(5~10):1。
6)KTJ1-50/1是(交流凸轮控制器)。
7)凸轮控制器按重复短时工作制设计,其FC=(25%)。
2.判断题(√)(×)1)工作速度低,使用次数少,满载机会少,通电持续率为15%,用于不紧张及繁重工作的场所,为轻级起重机。
(√)2)起重电动机为长期工作制,有较大的启动转矩,能进行电气调速,能适应较恶劣的工作环境和机械冲击。
(×)3)提升的第一挡为预备挡,用以消除传动系统中的齿轮间隙,并将钢丝绳张紧,以避免过大的机械冲击。
预备级的启动转矩一般限制在额定转矩的50%以下。
(√)4)应用凸轮控制器控制电动机控制电路简单,维修方便,广泛用于中小型起重机的平移机构和小型起重机提升机构的控制中。
(√)5)下降“1”为预备挡,该挡位是为适应提升机构由上升变换到下降工作,消除因机械传动间隙对机构的冲击而设的。
所以此挡不能停顿,必须迅速通过该挡,以防由于电动机在制动状态下时间过长而烧毁电动机。
(√)6)PQYl型运行机构控制电路按控制2台电动机。
(×)3.简述桥式起重机的运动形式。
答:①起重机由大车电动机驱动沿车间两边的轨道作纵向前后运动;②小车及提升机构由小车电动机驱动沿桥架上的轨道作横向左右运动;③在升降重物时由起重电动机驱动作垂直上下运动。
4.桥式起重机的结构主要由哪几部分组成?答:桥式起重机的主要结构的主要由操纵室、辅助滑线架、交流磁力控制盘、电阻箱、起重小车、大车拖动电动机、端梁、主梁等组成。
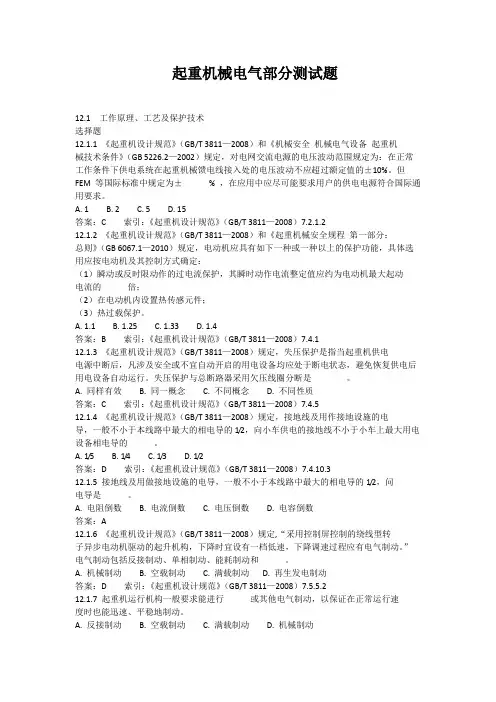
起重机械电气部分测试题12.1 工作原理、工艺及保护技术选择题12.1.1 《起重机设计规范》(GB/T 3811—2008)和《机械安全机械电气设备起重机械技术条件》(GB 5226.2—2002)规定,对电网交流电源的电压波动范围规定为:在正常工作条件下供电系统在起重机械馈电线接入处的电压波动不应超过额定值的±10%。
但FEM 等国际标准中规定为±% ,在应用中应尽可能要求用户的供电电源符合国际通用要求。
A. 1B. 2C. 5D. 15答案:C 索引:《起重机设计规范》(GB/T 3811—2008)7.2.1.212.1.2 《起重机设计规范》(GB/T 3811—2008)和《起重机械安全规程第一部分:总则》(GB 6067.1—2010)规定,电动机应具有如下一种或一种以上的保护功能,具体选用应按电动机及其控制方式确定:(1)瞬动或反时限动作的过电流保护,其瞬时动作电流整定值应约为电动机最大起动电流的倍;(2)在电动机内设置热传感元件;(3)热过载保护。
A. 1.1B. 1.25C. 1.33D. 1.4答案:B 索引:《起重机设计规范》(GB/T 3811—2008)7.4.112.1.3 《起重机设计规范》(GB/T 3811—2008)规定,失压保护是指当起重机供电电源中断后,凡涉及安全或不宜自动开启的用电设备均应处于断电状态,避免恢复供电后用电设备自动运行。
失压保护与总断路器采用欠压线圈分断是。
A. 同样有效B. 同一概念C. 不同概念D. 不同性质答案:C 索引:《起重机设计规范》(GB/T 3811—2008)7.4.512.1.4 《起重机设计规范》(GB/T 3811—2008)规定,接地线及用作接地设施的电导,一般不小于本线路中最大的相电导的1/2,向小车供电的接地线不小于小车上最大用电设备相电导的。
A. 1/5B. 1/4C. 1/3D. 1/2答案:D 索引:《起重机设计规范》(GB/T 3811—2008)7.4.10.312.1.5 接地线及用做接地设施的电导,一般不小于本线路中最大的相电导的1/2,问电导是。
起重机械电气安装习题作业种类=起重机械作业作业项目=电气安装1、按GB10051.2制造的吊钩,其危险断面的磨损量不应大于原高度的()。
(单选题)A、5%B、10%C、15%。
2、安装在葫芦式起重机主梁两端适当位置,阻止葫芦小车车轮运行,阻止小车横行至极限位置而停车,该装置是()。
(单选题)A、护钩装置;B、导绳器;C、阻进器;D、缓冲器3、起重机械常用的调速方法有直流调速()。
(单选题)A、机械调速;B、人工调速;C、交流调速4、起重电磁铁的供电电路与起重机主回路()。
(单选题)A、并联B、串联C、分立5、在露天作业的葫芦式起重机的电机及电器上应增设()装置。
(单选题)A、防日晒;B、防风吹;C、提高其防护级别;D、防雨罩6、当有下降深度时,起重机的起升高度与下降深度之和称为()。
(单选题)A、起升高度;B、起升范围;C、钢丝绳长度7、安全报警装置的作用是当载荷达到额定起重量的()%时,发出提示性报警信号。
(单选题)A、80;B、90;C、95;D、1008、起重机的工作级别可分为( )个。
(单选题)A、八;B、九;C、十;D、十一9、按行业沿用标准制造的吊钩,其危险断面磨损量应不大于原尺寸的()。
(单选题)A、5%B、10%C、15%。
10、司机室位于大车滑线端时,通向司机室的梯子和起台与滑线间应设置安全防护板。
( )(单选题)A、正确;B、错误。
11、车轮主要损伤的形式是磨损、硬化层压碎和()。
(单选题)A、点蚀B、锈蚀12、起重机紧急断电保护是利用装设在司机室内便于操作位置的紧急开关来实现的。
()(单选题)A、正确;B、错误。
13、起重机采用管配线时,一管内最多只能穿设()台电动机的导线。
(单选题)A、2B、114、超载限制器的综合误差仍大于()时应报废。
(单选题)A、10%B、15%15、常闭式制动器在制动装置静态时处于()状态。
(单选题)A、打开B、制动16、车轮轮缘磨损量超过原厚度的10%时,车轮应报废。
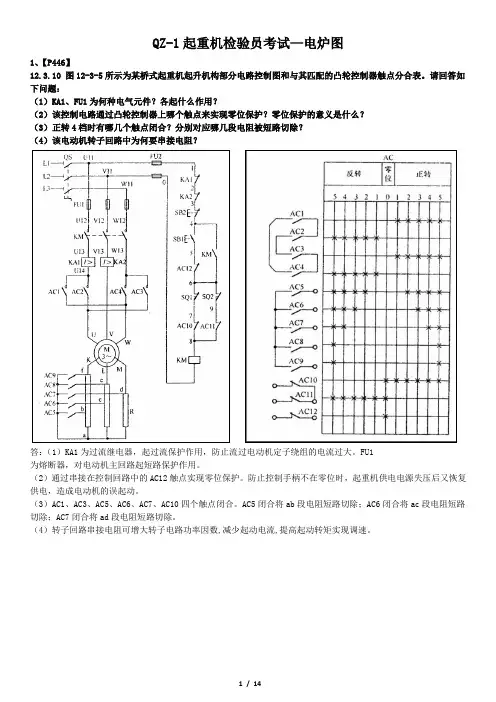
QZ-1起重机检验员考试—电炉图1、【P446】12.3.10 图12-3-5所示为某桥式起重机起升机构部分电路控制图和与其匹配的凸轮控制器触点分合表。
请回答如下问题:(1)KA1、FU1为何种电气元件?各起什么作用?(2)该控制电路通过凸轮控制器上哪个触点来实现零位保护?零位保护的意义是什么?(3)正转4档时有哪几个触点闭合?分别对应哪几段电阻被短路切除?(4)该电动机转子回路中为何要串接电阻?答:(1)KA1为过流继电器,起过流保护作用,防止流过电动机定子绕组的电流过大。
FU1为熔断器,对电动机主回路起短路保护作用。
(2)通过串接在控制回路中的AC12触点实现零位保护。
防止控制手柄不在零位时,起重机供电电源失压后又恢复供电,造成电动机的误起动。
(3)AC1、AC3、AC5、AC6、AC7、AC10四个触点闭合。
AC5闭合将ab段电阻短路切除;AC6闭合将ac段电阻短路切除;AC7闭合将ad段电阻短路切除。
(4)转子回路串接电阻可增大转子电路功率因数,减少起动电流,提高起动转矩实现调速。
2、【P439】12.3.4 图12-3-1为自激动力制动主令控制电路控制线路。
简述:(1)主令控制器控制线路的工作原理?(2)零位保护的工作原理?(3)下降第一档、第四档、第五档时,主令控制器触点的通断情况及电动机的状态?(4)结合图示,说明-K95、-K93、-F24、-F41、-F7的作用是什么?注:该图PC主触点少一个符号PC。
答:(1)主令控制器控制线路的工作原理:该控制线路属于非对称系统。
上升有五档,与一般转子电阻起动控制相同;下降有四档,动力制动调速,可以收到10~60%额定速度的低速。
一档强力制动:下降调速时-K31 、-K32 首先被接通.由电源经过过流继电器-F22 、-K31 、电动机绕组、-K32 、-F24 、 V0和-F23 形成一个预励磁电流通路,该电流大约3~10A ,为建立电势作好准备。
2023年起重机械电气安装维修参考题库含答案(图片大小可自由调整)第1卷一.全能考点(共50题)1.【单选题】关于短路保护的说法正确的是()。
A、起重机上宜设总断路器来实现短路保护B、起重机的机械机构由直流电动机拖动时,应单独设短路保护C、起重机的机械机构由直流并激电动机拖动时,应单独设短路保护2.【判断题】起重机的电路图中根据电路具体作用可分为主电路、控制电路和照明信号电路。
3.【判断题】起重机的金属及所有电气设备的金属外壳、管槽、电缆金属外壳皮和隔离变压器低压侧均应有可靠的接地。
4.【多选题】建设单位有下列()行为之一的,责令限期改正,处20万元以上50万元以下的罚款;造成重大安全事故,构成犯罪的,对直接责任人员,依照刑法有关规定追究刑事责任;造成损失的,依法承担赔偿责任。
A、对施工单位提出不符合安全生产法律、法规和强制性标准规定的要求的B、要求施工单位压缩合同约定的工期的C、未对施工单位进行总交底的D、未足额支付安全文明施工措施费的E、不履行监督管理职责的其他行为5.【单选题】电缆管内径最少不得小电缆外径的()倍。
A、1.5B、2C、2.5D、36.【判断题】保护接地系统的接地电阻不得大于10Ω。
7.【判断题】低压动力线路一般按发热条件选择导线截面积。
8.【判断题】室内工作的起重机,电线应敷设于线槽或金属管中。
9.【单选题】人体触电持续时间长短与危险性的关系下面说法错误的是()。
A、触电的危险只与电流大小有关与时间无关D、如果触电时间很长,即使是安全电流也可能致人死亡10.【判断题】万用表测量小功率二极管时,可选用任何电阻挡进行测试。
11.【判断题】控制器的直立手柄应设有防止因意外碰撞而使电路接通的保护装置。
12.【判断题】起重机固定式照明装置的电源电压可以使用380V,除单一蓄电池供电的电压不超过24V 的系统外,严禁采用金属结构做照明线路的回路。
13.【单选题】人体触电最严重的是()。
第一章电气传动系统的力学基础和调速的基本概念1-1 起重运输机械的电气传动包括哪些内容?什么叫开环系统?什么叫闭环系统? 答:起重运输机械的电气传动包括:电动机、机械传动机构和电动机的控制系统。
开环系统:电动机的输入端经过开关和控制电器由电源供电,而输出端则通过传动机构以一定的传动比与工作机械相连接的系统。
闭环系统:除了包含有开环系统中的内容外还增加了一个信息处理单元也就是控制装置。
1-2 什么叫机械特性的硬度?举例说明答:机械特性的硬度表示转矩随转速的变化的程度,是转矩变化与转速变化之比nM ∆∆=β。
例:电动机的机械特性硬度:∞=β 转矩改变时转速不变 (绝对硬特性)40~10=β 转速随转矩的变化而改变但程度不大(硬特性) 10<β 转速随转矩的变化有较大的改变(软特性)1-3 什么叫恒转矩负载、变转矩负载、阻转矩负载和位转矩负载? 答:恒转矩负载:其转矩不随转速变化。
变转矩负载:其工作转矩随转速变化而变化。
阻转矩负载:转速方向改变时转矩方向也改变,负载产生的转矩方向始终与运动方向相反,其特点是转矩负载始终其阻碍作用。
位转矩负载:负载所产生的转矩方向始终与运动无关,大多数与位势有关。
1-4 起重运输机各种机构(起升、运行、回转、变幅)转矩负载的机械特性各有什么特点?试画出其机械特性曲线(参考课本P6-P7)1-5 电车从平路开向下斜坡时转矩负载的性质发生了什么变化?答:电车在平路时,负载所产生的转矩反向始终与运动反向相反,为阻转矩负载;下坡时,负载所产生的转矩方向与运动方向无关,为位转矩负载。
1-6试用运动方程式说明系统处于静止、恒速旋转、加速、减速各种工作状态的条件是什么?在图1-17几种情况下系统的运行状态是加速?减速?还是匀速(箭头表示转矩都实际作用方向)?答:运动方程式:=当dn/dt=0时,n=常量,电动机处于稳定运转状态,此时,即电动机发出的拖动转矩的大小由机械负载转矩所决定,并与之相等。
一填空题1、履带起重机全车电压DC24V,由两台蓄电池串联组成2、全车线路采用单线制,电源为负极搭铁方式3、蓄电池主要用于起动发动机,为电气控制线路以及照明设备供电4、控制器、显示器、发动机、力矩限制器、远程控制终端之间应用CAN总线技术进行数据通讯,系统可靠性高。
5、电控系统主要由控制系统、力限器系统和闭路监视系统组成。
6、发动机起停电气控制电器主要由点火开关、启动接触器、蓄电池、起动马达、发电机、和燃油开关电磁阀组成7、力矩限制系统主要由显示器、力传感器、角度传感器和控制器等四部分组成。
8、发电机发电给蓄电池补充电能,同时向用电设备供电9、主副吊钩防过卷,用于防止吊钩过提升。
当起重钩提升到一定高度时,防撞开关动作,起重钩提升动作自动停止,而只能进行起重钩下降的操作,从而防止起重钩过卷现象的出现。
10、闭路监视系统主要由显示器、四画面分割器、切换器和摄像头等四部分组成。
11、遥控系统主要由遥控盒、钮子开关、接线盒组成12、辅助动作包括上车辅助动作和下车辅助动作13、遥控系统主要用于进行安装状态时的辅助动作的控制与实现,辅助整车的安装与拆卸14、履带式起重机的臂架危险工作方向是:臂架向下15、力矩限制器角度传感器:安装于主臂根部和副臂根部,用来检测臂架的工作角度;16、力矩限制器力传感器:安装于滑轮组上或者拉板受力点上,用于检测实际的负载情况17、CAN总线信号采用差分电压传送。
“显形”状态,用于表示CANH比CANL高,表示逻辑“0”,此时的电压值约为:CANH=3.5V,CANL=1.5V;“隐形”状态,表示逻辑“1”,此时的电压值约为:CANH=2.5V,CANL=2.5V18、CAN总线的高低信号之间的电阻大约是60欧姆左右,所以CAN总线的终端上一般会连接120欧姆的电阻,作为终端电阻。
二选择题19、如果发动机的机油压力值过低( D ),必须立即切断A、100±15kpaB、90±15kpaC、70±15kpaD、60±15kpa20、下列属于起重机辅助动作的是(BDE )A、主卷上升B、支腿下降C、副臂下降D、桅杆上升E、配重下降21、下面属于起重机安全装置的的是(ABC )A、回转灯、三色灯B、蜂鸣器C、主臂上限位开关D、行走反向开关22、停止发动机前,遵守以下规定:(AB )A、左控制手柄、右控制手柄和行走驱动操作杆处于中位;B、回转制动按钮处于制动状态;C、鸣笛警告周围的人员;D、手动油门调至最小;23、按照国家标准规定,力矩限制器的整体误差应控制在(B )的范围内A、±2%B、±5%C、±7%D、±8%24、在履带式起重机上,通过( D )可以检测到起重机的水平状态A、力矩限制器B、角度传感器C、力传感器D、倾角传感器25、力矩限制器的作用(ABC )A、监测起重机的力矩B、切断危险的动作方向C、防止起重机倾翻D、检测油压油温26、发动机起动前,遵守以下规定(ABCDE )A、左、右控制手柄和行走驱动操作杆都处于中位;B、鸣笛警告周围的人员;C、手动油门调至最小;D、拉上操纵解除;E、脚踏油门自由抬起状态27、力矩限制器显示器主要显示监测起重机的(ABC )A、力矩情况、额定载荷、实际载荷、B、臂架角度、主变幅拉杆受力百分比、C、作业幅度、最高作业高度等参数D、伺服压力、液压油温三简答题28、简述发动机的起动过程答:当钥匙开关置档位“0”时,整个系统处于停电状态。
第一章电气传动系统的力学基础和调速的基本概念1-1 起重运输机械的电气传动包括哪些内容?什么叫开环系统?什么叫闭环系统? 答:起重运输机械的电气传动包括:电动机、机械传动机构和电动机的控制系统。
开环系统:电动机的输入端经过开关和控制电器由电源供电,而输出端则通过传动机构以一定的传动比与工作机械相连接的系统。
闭环系统:除了包含有开环系统中的内容外还增加了一个信息处理单元也就是控制装置。
1-2 什么叫机械特性的硬度?举例说明答:机械特性的硬度表示转矩随转速的变化的程度,是转矩变化与转速变化之比nM ∆∆=β。
例:电动机的机械特性硬度:∞=β 转矩改变时转速不变 (绝对硬特性)40~10=β 转速随转矩的变化而改变但程度不大(硬特性) 10<β 转速随转矩的变化有较大的改变(软特性)1-3 什么叫恒转矩负载、变转矩负载、阻转矩负载和位转矩负载? 答:恒转矩负载:其转矩不随转速变化。
变转矩负载:其工作转矩随转速变化而变化。
阻转矩负载:转速方向改变时转矩方向也改变,负载产生的转矩方向始终与运动方向相反,其特点是转矩负载始终其阻碍作用。
位转矩负载:负载所产生的转矩方向始终与运动无关,大多数与位势有关。
1-4 起重运输机各种机构(起升、运行、回转、变幅)转矩负载的机械特性各有什么特点?试画出其机械特性曲线(参考课本P6-P7)1-5 电车从平路开向下斜坡时转矩负载的性质发生了什么变化?答:电车在平路时,负载所产生的转矩反向始终与运动反向相反,为阻转矩负载;下坡时,负载所产生的转矩方向与运动方向无关,为位转矩负载。
1-6试用运动方程式说明系统处于静止、恒速旋转、加速、减速各种工作状态的条件是什么?在图1-17几种情况下系统的运行状态是加速?减速?还是匀速(箭头表示转矩都实际作用方向)?答:运动方程式:错误!未找到引用源。
=错误!未找到引用源。
当dn/dt=0时,n=常量,电动机处于稳定运转状态,此时错误!未找到引用源。
,即电动机发出的拖动转矩错误!未找到引用源。
的大小由机械负载转矩错误!未找到引用源。
所决定,并与之相等。
此时系统作匀速运动或静止。
当错误!未找到引用源。
时,dn/dt>0 电动机处于加速状态。
当错误!未找到引用源。
时,dn/dt<0 电动机处于减速状态。
图一:错误!未找到引用源。
,dn/dt<0,电动机处于减速状态,直到静止。
图二:错误!未找到引用源。
与转速n 反向,应该是负值,所以依然错误!未找到引用源。
,dn/dt<0,M >M fMM n o f M>M fMM no f M <M fMM n o f M =M fMM no f M =M fMM no f电动机处于减速状态,当速度n 减小到0时,电动机转矩仍然存在,会反向加速。
图三:错误!未找到引用源。
,dn/dt>0 电动机处于加速状态图四:错误!未找到引用源。
与转速n 反向,应该是负值,所以依然错误!未找到引用源。
,dn/dt<0,电动机处于减速状态,当速度n 减小到0时,电动机转矩仍然存在,会反向加速。
图五:当dn/dt=0时,n=常量,电动机处于稳定运转状态,此时当n=0时系统静止,n ≠o 时系统作匀速运动。
1-7 电力拖动系统稳定运行的必要和充分条件是什么?答:必要条件:两个机械特性曲线相交(电动机机械特性曲线和工作机械的机械特性曲线)充分条件:电动机稳定运行后,由于某种干扰使转矩稍有变化时,电动机发出的转矩必须使转速恢复到原值。
1-8速度调节和速度变化的概念有何区别?答:速度调节是人为的对电动机加以电器附加作用改变电机参数使得转速得到改变,电动机在不同的特性曲线上运行;速度变化是由于工作机械的负载发生变化而引起电动机的转速改变,电动机在同一特性曲线上运行。
1-9 电动机调速静差度的概念是什么?硬度相同的机械特性其静差度是否相等?答:电动机在某条机械特性曲线上运行时,由理想空载转速减到额定转速时的转速降落与理想空载转速的比值e n n ∆=μ;硬度相同的机械特性其静差度不一定相等。
1-10 调速范围和静差度二者有关系?答:静差度越小调速范围就越窄,二者是相互制约的,关系式:)(μμ-∆=1n n e 'e D1-11电动机和工作机械都机械特性曲线如图1-18所示,问哪些是系统都稳定平衡点,哪些不是,为什么?1——电动机的机械特性曲线 2——工作机械的机械特性曲线答:图1、3、4、5是稳定平衡点。
原因:(1)两曲线相交,(2)在相交点往上,转速稍有增大时,电动机发出的转矩小于转矩负载,两个转矩的合成是负的,结果使电动机转速逐渐下降稳定到相交点;相反,当转速稍有减少时,合成转矩是正值也使转矩增加到相交点。
图2不是稳定平衡点。
原因:虽然两曲线相交,但是在相交点往上,转速稍有增大时,电动机发出的转矩大于转矩负载,两个转矩的合成是正的的,结果使电动机转速越来越大;相反,当转速稍有减少时,合成转矩是负值也使电动机转速越来越小,所以不稳定。
第二章 直流电动机的电气传动基础2-1 什么叫电动机的机械特性?什么叫自然特性?什么叫人为特性? 答:机械特性:电动机的转速n 与转矩M 两个物理量之间的关系特性。
自然特性:电枢电路中没有附加电阻,并且电枢电压和励磁磁通皆为额定值时,所得到的机械特性。
人为特性:当上述自然特性条件之一不能满足时的机械特性。
2-2为什么错误!未找到引用源。
称为理想空载转速?它意味着什么? 答:他激电动机在自然特性时,其机械特性方程为: 错误!未找到引用源。
n 0Mn 0Mn 0Mn 0M12345nM转矩M=0时,即载荷为零,但这种情况这实际中是不存在的,因为电动机内存在内阻、摩擦等因素,所以称为理想空载转速。
这时,意味着电动机忽略了内阻、摩擦等不可避免都因素。
而且转速错误!未找到引用源。
,意味着错误!未找到引用源。
与转矩M 、电枢电阻错误!未找到引用源。
无关,只与电枢电路额定电压U ,励磁电路都额定磁通错误!未找到引用源。
和电动机都构造常数错误!未找到引用源。
有关,一旦电动机型号确定,错误!未找到引用源。
就确定,为一固定值。
2-3 直流他激电动机可能出现哪几种制动状态?叙述各种制动装饰的机械特性曲线,并绘制出气向量图和功率流图。
(参考课本P16-P20)2-4 在M-n 直角坐标系中绘出直流他激电动机在电动与该种制动状态时的机械特性曲线,并写出其机械特性方程。
(参考课本P15-P20)2-5 一台直流他激电动机拖动运行机构在电动机带动机构正向匀速运行时,从反接开始到系统达到新的稳定平衡状态之间,电动机经历了哪几个运行状态?最后在什么状态下建立新稳定点?答:正向运行 减速 速度为零 反向运行。
电枢电压反接后,由于惯性电动机转速n 保持在A 点大小, 因而开始运行在B 点,随制动力矩逐渐减小,沿曲线2运行 到C 点,C 点处n=0,最后继续沿特性曲线下降,在反向 运行的电动状态建立新的稳定点。
如图所示: 2-6 电枢反接制动和倒拉反转制动有何异同点? 答:相同点:都是通过外部条件作用下,使电枢电压U 和电动势E,由方向相反变为方向一致,都必须在电枢电路中串入附加制动电阻f R ,都是人为特性。
不同点:倒拉反转制动时通过增大电阻f R ,使机械特性变软,造成电动机的旋转方向n 与电机产生的磁力矩M 方向相反,即改变E 的方向,使其与电枢电压方向一致;电枢反接是通过电枢电压的反接,由于惯性电机产生转矩M 的方向和运行转速n 的方向相反,达到反接制动的状态;倒拉反转制动用于起升机构;电枢反接用于运行机构。
2-7 直流他激电动机有哪几种调速方法并比较其优缺点。
答:共有三种调速方法:电枢串电阻,调节电压和减小磁通。
电枢串电阻调速:调速范围较小,静差度较大,稳定性较差,是恒转矩调速。
随着转速降低,内耗功率增大,电动机效率降低,调速方法简单,控制方便。
多用于短时间调速。
调节电压调速:调速范围较宽,静差度较小,稳定性较好,是恒转矩调速。
减小磁通调速:调速范围比较窄,静差度较大,稳定性较差,是功率调速,可以实现无级调速,同时电动机的能耗较小控制也比较方便。
2-8 一台直流他激电动机的参数如下:minr 420n V,220U A,120I kw 25P e e e ====,。
试计算并绘出此电动机的以下特性曲线: (1)自然特性曲线;(2)电枢附加电阻为0.4Ω时的人为特性曲线; (3)电枢电压110V U =时的人为特性曲线; (4)磁通e .80Φ=Φ时的人为特性曲线。
答:1.自然特性曲线:===+==-===eee eee e e ee n P M n n n Rs I U P 955012Re )1(021ηη2.电枢附加电阻为0.4时的人为特性曲线=∆+=∆+=∆∆-=Φ=∆e sfs r s fs e r een e e n R R R n R R R n n n n C R 02s C Mn3.电枢电压110V U =时的人为特性曲线=⇒=0/0/0n UU n n e4.磁通e .80Φ=Φ时的人为特性曲线==s e 1R U I=Φ=11I C M M=Φ=Ce Ue/0n2-9、一台直流他激电动机的参数如下:错误!未找到引用源。
=7.2KW , 错误!未找到引用源。
=110V ,错误!未找到引用源。
=900r/min ,e η=85%, 电枢电阻s R =0.08欧。
若要在额定负载下使电动机的转速下降至450r/min,采用电枢回路串电阻的方法。
问应串入多大的附加电阻?此时电动机的输出功率和运行效率又应为多少?解:由37.21085%110e e e e eP U I I η⨯===⨯可得到:77e I A =(另解:A RsUen I I Ue n Rs e e 125.103)1(e e )1(2121=-=⇒-=) 又0.115min/e e sE EeU I R C V r n φ-==∙,则0110956.52/min 0.115e E E U n r C φ===056.52/min e e n n n r ∆=-=0956.52450516.52/min r n n n r ∆=-=-=终由s f f s 0.08516.5256.520.08r e R R n R n R +∆+===∆可得:f 0.65R =Ω(Ω49.0)即应串入0.65Ω(Ω49.0)的附加电阻。
s e e R I U n 'e C -=Φ 得:=+Φ-=fS e e e R R nC U I '' =Φ==9550C 9550Mn P 'e n I e=='e IU Pη44.25%(46.19%)2-10、一台直流他激电动机的参数如下:错误!未找到引用源。