机械臂腕力传感器负载端重力补偿算法与仿真
- 格式:doc
- 大小:746.50 KB
- 文档页数:10

重载机械臂对未知载荷参数的补偿控制罗天洪;张剑;陈才;马翔宇【摘要】为了研究机械臂在载荷参数未知,尤其在所持载荷较大的情况下,对机械臂的位姿精确控制问题.利用牛顿一欧拉方程建立重载机械臂系统的动力学方程,以此为基础,设计一种基于标称计算力矩控制器加滑模神经网络补偿器的复合控制方案,用来控制机械臂末端执行器夹持载荷参数未知且载荷大的情况,即通过滑模神经网络来补偿由于系统未知参数对标称计算力矩的误差影响,以确保存在未知参数和较大惯性的情况下整个控制系统的渐进稳定性.该方法能够有效地控制重载机械臂系统的位姿.于此同时,此方法具有系统动力学方程不要求系统惯性系数呈线性函数关系的显著优点.通过仿真研究表明该方法的有效性.【期刊名称】《机械设计与制造》【年(卷),期】2016(000)005【总页数】4页(P171-174)【关键词】重载机械臂;参数未知;滑模神经网络;机械臂控制【作者】罗天洪;张剑;陈才;马翔宇【作者单位】重庆交通大学机电与汽车工程学院,重庆400074;重庆交通大学机电与汽车工程学院,重庆400074;重庆交通大学机电与汽车工程学院,重庆400074;重庆交通大学机电与汽车工程学院,重庆400074【正文语种】中文【中图分类】TH16随着工业化进程的不断加快,机械臂由于其高精度和高灵活性,在工业进程中所起到了不可代替的作用。
利用机械臂完成各种复杂而繁琐的工业作业,一直以来被国内外研究员视为是一种有效的方法。
为了使机械臂达到预期效果,关于其动力学与控制的研究倍受关注[1-5]。
考虑在大型装配线上,例如船舶,航天飞机的装配车间,不仅需要机械臂有足够的负载能力,而且还需要有较高的精度,以便能够精确安装。
因此需要对机械臂的末端执行器位姿进行精确控制。
然而由于高负载的影响,不仅会导致系统参数不精确,而且会使得机械臂产生较大的惯性。
为了克服重载机械臂的控制问题。
以往常常在控制系统设计中做出某些牺牲,如不得不降低操作臂运行速度,以克服较大惯性的影响。
·开发与创新·The Manipulator Gravity Compensation Method Based on the Principle of Static EquilibriumHE Lei ,SUN Han-Xu ,JIA Qing-Xuan ,YE Ping(Automation School,Beijing University of Posts and Telecommunications,Beijing 100876,China)Abstract:The existing methods for the simulation of spatial microgravity environment are included neutral buoyancy,freely-falling method,air-bearing suspension system and sling suspension system.Because of its cost,realization and other shortcomings,they can't work very well when used in the space manipulator simulation.Based on the static balance principle and sling suspension system,a new method is proposed in the paper.Through the verification of ADAMS simulation showed that the method can be used to manipulator's zero-g simulation.Key words:space manipulator ;static equilibrium ;ADAMS simulation ;zero-gravity simulation0引言随着科学技术的发展,空间机器人在人类探索太空活动中起着越来越重要的作用,它可以协助或者代替宇航员完成某些舱外任务从而保证宇航员的安全。

一种机器人六维腕力传感器的标定方法郑朝阳;翟其建;赵金鹏【摘要】该文结合所用六维腕力传感器的结构形式提出了其标定的方法,分析了传感器耦合的原因,对解耦的方法进行了研究,用试验方法对传感器进行了标定,得出了标定矩阵C,运用Matlab软件对各单维力/力矩的试验结果进行了线性拟合,结果显示线性化较好,弹性体结构设计合理,试验验证后结果显示标定矩阵C误差较小,符合机器人使用要求.最后分析了标定中误差产生的原因,提出了减少误差的措施,具有重要的工程实践意义.%Combined with the structure of the six dimensional wrist force sensor,the calibration method was put forward,the reason of the sensor coupling was analyzed,the decoupling method was studied,the sensor was calibrated using test method,the calibration matrix C was obtained,the test results of each couple/torque were fitted by Matlab software,the results show that the linearization is good,the elastomer structure design is reasonable,the results show that the error of the calibration matrix C is small,which meets the requirements of the robot.Finally,the causes of the errors in calibration are analyzed,and the measures to reduce the errors are proposed,which have important engineering practical significance.【期刊名称】《自动化与仪表》【年(卷),期】2018(033)001【总页数】6页(P41-45,50)【关键词】机器人;六维力;传感器;标定方法;误差分析【作者】郑朝阳;翟其建;赵金鹏【作者单位】中国船舶重工集团公司第七一六研究所,连云港222006;中国船舶重工集团公司第七一六研究所,连云港222006;中国船舶重工集团公司第七一六研究所,连云港222006【正文语种】中文【中图分类】TH16对于机器人腕力传感器来说,由于结构复杂、加工误差以及弹性体结构质地的不均匀性等各方面因素的影响,使得传感器各输出通道之间存在相互耦合,这种耦合的关系很复杂,难以从理论上进行精确的描述[1],需要采用试验的方法来进行标定。

一种具有工具重力补偿功能的机械臂力控牵引方法李宁;孟繁乐;曾柏伟;丁辉;王广志【摘要】Objective To develop a traction force control method for manipulator with tool's gravity compensation according to the need of force-position interaction in real time with operators in surgery and rehabilitation training.Methods We firstly use six-degree force transducer mounted on the end of the manipulator to detect traction force,then translate it to the displacement of the manipulator's nominal position and update the motion velocity by force-displacement and force-velocity transfer algorithm,finally,drive the manipulator towards the direction of the traction force.A gravity compensation algorithm is implemented in this method in order to eliminate the deviations of the tool's gravity.Results Experiments simulate the registration process of the stereotactic frameless surgery,and the data set suggests that the tool's gravity compensates within ±0.2 N at the steady state.Maximum force control loop frequency is 30 Hz and maximum system latency is 52 ms.Conclusions The manipulator can be driven and avoid the obstacle by traction force easily and smoothly,and the outcome of the gravity compensation is significant.%目的本文根据多自由度机械臂在外科手术、康复训练中与操作人员进行实时力位交互的需求,设计了一种具有工具重力补偿功能的机械臂力控牵引方法.方法首先通过安装在机械臂末端的六自由度力传感器检测作用在末端工具上的牵引力,然后应用上位机中的力-位与力-速控制算法将力信息转化为机械臂末端预期位姿偏移量并更新机械臂末端运动速度,进而控制机械臂沿受力方向运动.本文进一步提出一种末端工具重力补偿算法,能够有效补偿机械臂末端工具重力在力传感器上的偏差值.结果实验模拟无框架立体定向手术的患者注册环节,在无牵引力作用时上位机补偿后的外力值控制在±0.2N以内,最大力控循环采样率30Hz,最大系统延迟52ms.结论通过牵引力控制能够方便地对机械臂实现力控牵引摆位及运动过程中的紧急避障,重力补偿效果明显.【期刊名称】《北京生物医学工程》【年(卷),期】2017(036)001【总页数】8页(P1-8)【关键词】串联型机械臂;机械臂控制;力控牵引;紧急避障;重力补偿【作者】李宁;孟繁乐;曾柏伟;丁辉;王广志【作者单位】清华大学医学院生物医学工程系,北京 100084;清华大学医学院生物医学工程系,北京 100084;清华大学医学院生物医学工程系,北京 100084;清华大学医学院生物医学工程系,北京 100084;清华大学医学院生物医学工程系,北京100084【正文语种】中文【中图分类】R318.04近年来,多自由度机械臂在医疗中的应用日益广泛,较为典型的是在外科微创手术中对手术工具的辅助托持与入路引导[1-2],以及在偏瘫患者康复治疗中对患者的辅助运动训练[3-4]。

负载重力补偿技术负载重力补偿技术是一种常见的工程控制技术,用于减轻或抵消负载物体的重力影响,使得操作更加轻松和精准。
该技术广泛应用于机械臂、医疗设备、航空航天等领域,为提高生产效率和工作安全性发挥了重要作用。
本文将从负载重力补偿技术的原理、应用领域和发展趋势等方面进行探讨。
一、负载重力补偿技术的原理负载重力补偿技术的实现原理主要基于传感器、控制算法和执行器等核心组件的协同作用。
典型的负载重力补偿系统包括传感器模块、控制器和执行器等部分。
传感器模块用于感知负载物体的重力信息,控制器则根据传感器反馈的数据实时计算出补偿力,并通过执行器对负载施加相应的力或动作,以抵消或减轻重力的影响。
负载重力补偿技术的主要原理包括重力感知、动态补偿和灵敏控制。
在重力感知方面,传感器模块通常采用加速度计、力传感器等装置,可以实时监测负载物体所受的重力大小和方向。
通过动态补偿,控制算法可以根据传感器反馈的信息,及时生成相应的控制信号,驱动执行器作出实时调整,以抵消或减轻负载的重力影响。
在灵敏控制方面,对于一些需要高精度操作的场景,负载重力补偿技术还需要具有快速响应和高精度控制的特点,以满足复杂、多变的工作环境需求。
二、负载重力补偿技术的应用领域负载重力补偿技术在各种领域具有广泛的应用价值,主要体现在以下几个方面:1. 机械臂领域:在工业生产中,机械臂通常需要进行各种复杂的抓取、搬运、组装等操作。
而在实际操作中,机械臂所受的重力会对准确性和稳定性造成影响。
负载重力补偿技术可以实时感知和抵消重力影响,使得机械臂的操作更加精准和稳定,提高生产效率和产品质量。
2. 医疗设备领域:在手术机器人、康复设备等医疗设备中,负载重力补偿技术可以帮助医生或操作人员更加轻松地进行精细的操作,提高手术或治疗的成功率和安全性。
3. 航空航天领域:在航空飞行器、航天器等领域,负载重力补偿技术可以减轻飞行员或宇航员的工作负担,提高操纵精度,并对特殊环境下的操作提供更大的支持。
重力补偿机械手
是一种智能化机械手,可以通过电子控制实现精准控制,具备
重力补偿功能,因而得名。
本文将介绍的特点、应用场景以及发
展前景。
一、的特点
1. 精准控制:可以通过电子控制实现精准控制,运动轨迹更加
精准,可靠性更高。
2. 重力补偿:机械手在抓取物体时,往往需要克服物体自身的
重力,这对机械手的负载能力、抓取精度等都提出了很高的要求。
通过感知物体的重力,自动调整抓取力和角度,解决了这一问题。
3. 自适应:具有自适应能力,可以根据不同的场景和任务,自
动调整姿态、力量和速度。
二、的应用场景
1. 工业领域:被广泛应用于汽车制造、电子制造、食品加工、
医药制造等领域,可以完成高精度的组装、加工、包装等任务,
提高生产效率和质量。
2. 物流领域:在物流、仓储等领域也有广泛应用,可以快速高
效地完成物品的搬运、分类、扫描等任务,提高工作效率和安全性。
3. 军事领域:在军事领域也有广泛应用,可以完成救援、拆弹、清理等任务,提高作战效率和安全性。
三、的发展前景
随着物联网和人工智能技术的不断发展,也将得到更广泛的应
用和发展。
未来,将更加智能化、自适应和灵活化,可以适应更
加复杂多变的场景和任务。
同时,的应用领域也将更加广泛,从
工业领域逐渐向教育、医疗、家庭和娱乐等领域拓展,为人们带
来更多便利和舒适。
总之,是一种具有智能化、精准控制和重力补偿等特点的机械手,具有广泛的应用和发展前景。
未来,将在物联网和人工智能技术的推动下,更好地服务于人们的生产和生活。
专利名称:航天器机械臂柔性随动控制重力补偿方法
专利类型:发明专利
发明人:刘宏阳,傅浩,卫月娥,张立建,胡瑞钦,唐赖颖,易旺民,万毕乐,孙继鹏,布仁,孙刚,张成立,郭静然
申请号:CN201310552492.0
申请日:20131108
公开号:CN103600354A
公开日:
20140226
专利内容由知识产权出版社提供
摘要:本发明公开了一种航天器机械臂的柔性随动控制重力补偿方法,柔性随动控制中将六维力传感器设置在机械臂末端与负载之间,该方法通过控制机械臂使负载处于多个不同的空间姿态,在负载无外力作用的情况下,记录每个空间姿态下六维力传感器的测量数据并根据力与力矩的物理关系,由测量数据计算得到负载的重力大小G及负载重心的坐标;并根据负载的受力情况对重力的影响进行补偿。
本发明的方法,用机械臂系统本身测量负载的重力和重心位置,设计的算法计算出六维力传感器测得6个分量的重力补偿值,解决了机械臂柔性随动控制中的重力补偿问题。
申请人:北京卫星环境工程研究所
地址:100094 北京市海淀区友谊路104号
国籍:CN
更多信息请下载全文后查看。
机械臂仿真计算的流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!机械臂仿真计算的流程及应用机械臂仿真计算是一种重要的工程技术,它可以帮助工程师更好地设计和优化机械臂系统。
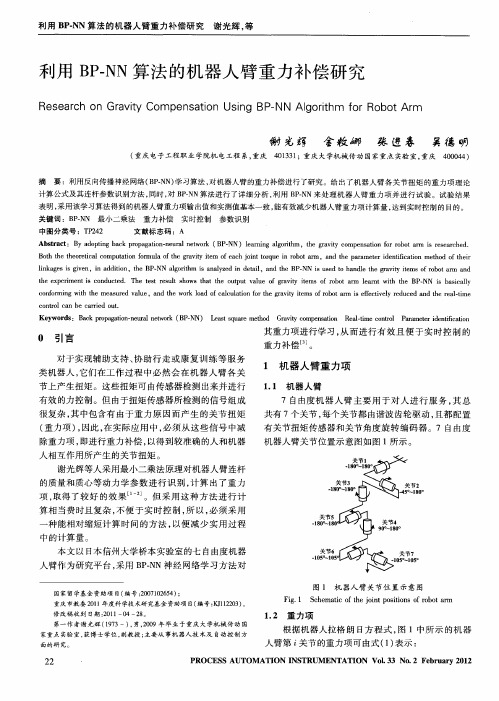
示教机械臂姿态解算改进方法仿真研究黄洋;姜文刚【摘要】在示教机械臂姿态解算精度优化的研究中,针对使用单组传感器进行数据融合,姿态解算的传统方法中存在的精度低,稳定性差的问题,设计了一种组合MEMS传感器的姿态解算方法.将六组传感器安装于载体坐标系三个轴上,分别测量两组传感器数据.以传感器量测数据与四元数估计数据的向量积代替姿态角误差作为互补滤波器的输入量,分别利用模糊控制器和PI控制器,根据互补滤波原理调节陀螺仪输出量.通过拓展卡尔曼滤波器进行姿态估计,得到更精确的四元数,进而转化为姿态角.仿真结果表明,在静态和动态情况下,多组传感器组合调节后的姿态角数据相比单组传感器PI调节在姿态角精度和系统稳定性上有进一步提高.【期刊名称】《计算机工程与应用》【年(卷),期】2018(054)015【总页数】6页(P126-130,138)【关键词】MEMS传感器;拓展卡尔曼滤波器;四元数;姿态解算【作者】黄洋;姜文刚【作者单位】江苏科技大学电子信息学院,江苏镇江 212003;江苏科技大学电子信息学院,江苏镇江 212003【正文语种】中文【中图分类】TP212.91 引言基于惯性传感器的机械臂示教系统是通过采集固定于人体手臂各个位置的惯性传感器数据,经过姿态解算与空间位置计算得到机械臂姿态运动轨迹,其核心在于惯性传感器解算姿态角度的精确性。
Rehbinder和Hu在其研究姿态解算算法的时候,采用了基于MEMS(微机电传感器)技术的陀螺仪和加速度计传感器组合的姿态解算算法,俯仰角和横滚角得到了一定的校正,但是航向角容易发生漂移。
Bachmann在进行三维空间姿态测量的研究中加入了磁力计,由磁力计数据对航向角进行校正。
由于姿态测量环境中的随机干扰对MEMS传感器测量精度的影响较大,同时受制于其本身的精度问题,导致经过误差标定的MEMS传感器在采集数据以及之后的姿态解算过程中不可避免的引起姿态角较大的偏差,最终导致姿态数据的漂移。
机械臂腕力传感器负载端重力补偿算法与仿真作者:刘岩武俊峰夏科睿马常友来源:《哈尔滨理工大学学报》2018年第02期摘要:针对机械臂运动时负载端姿态变化影响腕力传感器测量结果问题,提出一种腕力传感器负载端重力补偿算法。
通过分析机械臂负载端不同姿态下的重力变化形式,采用实验方法测定负载端重力与重心参数。
建立了腕力传感器重力补偿系统模型,结合机械臂运动学方程,推导出腕力传感器负载端重力补偿算法和机械臂末端作用力解算方法,并应用算例进行MATLAB与ADAMS联合仿真。
仿真结果表明,本补偿算法能有效地消除负载端姿态变化影响,通过腕力传感器准确地测量机械臂所受的外力信息,验证了机械臂腕力传感器负载端重力补偿算法的正确性。
关键词:机械臂;腕力传感器;重力补偿;仿真DOI:10.15938/j.jhust.2018.02.014中图分类号: TP241.3文献标志码: A文章编号: 1007-2683(2018)02-0078-08Abstract:Aiming at the problem that the measuring results of wrist force sensor can be influenced by load end′s attitude change when mechanical arm moves, this paper proposes a load gravity compensation algorithm for wrist force sensor.According to gravity variation of the load end in different mechanical arm posture, the relationship between the gravity of load end and the position of the center of gravity can be measured by experiment. We build a wrist force sensor gravity compensation model, and combining manipulator kinematics equation, we deduct a load gravity compensation algorithm for wrist force sensor and a calculation method for force acting on the end of mechanical arm. Specific examples have been tested by adopting the ADAMS and MATLAB joint simulation method. The results show that this compensation algorithm can effectively eliminate the influence of the attitude change of load end, the external force information of mechanical arm can be measured by wrist force sensor.And the results verify the correctness of the load gravity compensation algorithm for wrist force sensor.Keywords:mechanical arm; the wrist sensor; gravity compensation; simulation0 引言如今机器人广泛地应用到工业、军事、航天等自动化领域。
为使机器人更好的顺应接触的作业环境,一般会在机器人上安装力传感器,通过采集的力信息作为反馈条件,结合柔顺控制算法完成作业。
如工业机器人完成精密的装配、磨光、切削等任务时,用以修正机械臂末端的运动轨迹,使其达到理想效果[1-3];再如操作员为了通过施加较小的力,直观调整机械臂末端的姿态,实现机械臂的随动[4-5];还可以分析机核电站救灾机器人械臂作业时各关节受力情况,优化控制策略[6]。
所以当机器人与外界环境交互时,不仅依靠力传感器的反馈信息实现机器人高精度的柔顺作业,同时还确保机器人本体的安全性。
目前,国内外学者对力传感器的性能指标做了大量的研究工作,包括力传感器的静态标定和动态标定,测量结果的准确性和可靠性都有一定的提高和改善[7-9]。
但是当机械臂与六维力传感器配合使用时,安装的转接机构会对六维力传感器读数产生影响。
如果机械臂的负载端重力较小,可以不考虑负载端重力对六维力传感器力和力矩读数的影响[5]。
当机械臂负载端重力较大时,对力传感器读数产生的影响一般不可忽略。
负载端对传感器的受力敏感程度也会因外力的作用位置不同分为3个作用区域[10]。
在控制精密要求不高时,根据机械臂所受外界力的作用区域,忽略力或力矩的影响[4][11]。
浙江大学吴文祥针对摩擦引起机器人低速时运动性能恶化、作业精度差的问题,采用自适应鲁棒控制算法补偿机械臂关节摩擦[12]。
东南大学陈建元早些年利用增加姿态敏感单元的方法获取手爪空间姿态,在腕力传感器上增加三维直线加速度计,再通过信息处理来消除影响[13]。
该方法适用于一般早期工业机械臂,如今不需要借助外界传感器获取机械臂末端姿态,此外对于机构精密的机械臂、内部线路集成化,安装配合也不利于实现。
本文以带有腕力六维力传感器的六自由机械臂模型为研究对象,在空间中多次测定不同姿态下六维力传感器数据,采用最小二乘法拟合数据,获得负载端的重力与重心参数。
通过建立腕力传感器重力补偿系统模型,结合机械臂运动学方程,推导出腕力传感器负载端重力补偿算法,修正读数,进而得出机械臂末端作用力的解算方法,准确获取机械臂末端接触力,最后通过仿真验证机械臂腕力传感器负载端重力补偿算法的正确性。
1 传感器负载端重力补偿方法与测量1.1 传感器负载端重力大小与重心位置测量方法对传感器负载端重力进行补偿,需要明确腕力传感器负载端重力大小和重心位置。
一般将六维力传感器安装在机械臂末端的腕部,再通过转接装置与执行器相连,转接机构的复杂性使得传感器负载端重力与重心位置难以确定。
2 仿真实验与分析仿真实验包括两方面内容,首先根据机械臂运动学方程与轨迹规划算法,规划出机械臂末端运动曲线;然后应用具体算例,验证六维力传感器负载端重力补偿方法和机械臂末端作用力解算方法的正确性,为后续物理样机的程序开发打下基础。
2.1 仿真平台的搭建多体系统动力学分析软件Adams具有强大的运动学和动力学仿真及运算功能,但是在Adams软件中很难精准建立较为复杂的三维模型,所以凭借SolidWorks软件精准、快速的建模功能,事先在SolidWorks软件中设计并建立六自由度机械臂与移动平台的三维实体模型[14-15]。
将三维模型保存为x_t文件形式,导入Adams软件。
六自由度机械臂的三维实体模型,如图4所示。
模型导入到Adams软件后,需要对每个零件的质量、材料等参数进行设置,与真实机械臂参数保持一致。
机械臂底座中心点所在的坐标系为基坐标系,用固定副将机械臂底座固定在大地上。
机械臂六个关节均为旋转关节采用转动副进行连接,其它机构均采用固定副连接,这样机械臂每两个零件之间都定义好了约束关系,确保机械臂运动方式正确。
其中六维力传感器安装在机械臂腕部位置,末端装有两指夹持器。
虚拟样机中的移动机械臂模型,如图5所示。
为了实现对机械臂运动控制,首先采用D-H模型表示机械臂六个关节坐标系,利用关节间坐标系的变换,求取机械臂正逆运动学方程[16-17]。
并完成机械臂末端运动轨迹的规划,以及关节空间规划,实现了机械臂末端在笛卡尔空间的直线、圆弧等运动[18-20]。
应用Matlab 软件的强大的计算功能,建立M文件,设计并编写控制程序算法,包括逻辑控制程序、机械臂运动学、轨迹规划及六维力传感器负载端重力补偿等算法[21-22]。
2.2 机械臂运动轨迹规划与仿真机械臂末端是否变姿态运动对负载端重力补偿起决定性作用,要验证补偿算法的正确性,需对机械臂规划一段变姿态的运动轨迹。
本文在机械臂常作业的工作空间内,规划一段由直线和空间圆弧组成的变姿态的运动轨迹,并对运动轨迹进行位置和姿态插补算法。
首先,将该轨迹分两段分别进行的直线和圆弧位置插补运算:第一段轨迹由点P1到P2,进行直线位置插补运算;第二段轨迹由点P2、P3、P4组成,进行空间圆弧位置插补运算。
在笛卡尔空间下各点的空间坐标参见表1。
运用Matlab软件完成机械臂末端的上述轨迹规划,在两段轨迹插入足够数量的点数,确保机械臂末端轨迹仿真运动的平滑。
应用机械臂运动学逆解方程,在笛卡尔空间下求取运动轨迹中每一点坐标对应的六组关节角,确定6个关节随时间运动的角度,将角度拟合成曲线如图6所示,机械臂末端从点P1运动到P4,运动时间为40s,将6个关节随时间运动的关节角的函数录入到在Adams软件中,应用SPLINE函数作为机械臂各关节运动变化的规律曲线。
在软件中获取仿真中机械臂末端在基坐标系{O}下的运动轨迹的空间坐标值,与规划的轨迹进行比对,轨迹各轴误差小于0.01mm,可忽略不计。
仿真轨迹的曲线如图7所示。
2.3 传感器负载端重力补偿仿真实验与分析仿真需要明确负载端重力大小和重心位置,可利用Adams软件对负载端的质量及质心进行设定。
在实际应用中,可参照1.1节介绍的方法进行计算。
机械臂的负载端由末端执行器和转接件两部分组成,末端执行器质量m1=0.94kg,转接件质量m2=0.20kg,负载端总质量即两者质量总和约为m=1.14kg。
负载端在坐标系{S}下的重心坐标为(10,10,32),单位mm。
利用2.2节规划的直线和圆弧运动轨迹,令机械臂做空载运动,六维力传感器的数据如图8所示。
由图8可见,负载端重力对六维力传感器读数的影响,为了消除这种影响,需要在机械臂规划的轨迹运动过程中根据机械臂正运动学方程,确定机械臂末端每一时刻的姿态矩阵OSR。
并将已知量负载端总质量、重心位置代入式(13),即可求解出运动过程中每一时刻传感器负载端重力补偿数值,与六维力传感器实际值作差,实时标定六维力传感器的零位值,标定的误差曲线如图9所示。
仿真结果表明,当机械臂空载运动时,传感器负载端重力补偿算法解算出的结果与负载端对传感器读数的影响结果仅存在很小的误差,力误差小于0.01N,力矩误差小于0.02N·m。