在模拟量闭环控制中的应用
- 格式:ppt
- 大小:2.34 MB
- 文档页数:48
plc在生活中的运用
PLC在生活中的应用
1、开环控制
开关量的开环控制是PLC的最基本控制功能。
PLC的指令系统具有强大的逻辑运算能力,很容易实现定时、计数、顺序(步进)等各种逻辑控制方式。
大部分PLC就是用来取代传统的继电接触器控制系统。
2、模拟量闭环
对于模拟量的闭环控制系统,除了要有开关量的输入输出外,还要有模拟量的输入输出点,以便采样输入和调节输出实现对温度、流量、压力、位移、速度等参数的连续调节与控制。
目前的PLC不但大型、中型机具有这种功能外,还有些小型机也具有这种功能。
3、数字量控制
控制系统具有旋转编码器和脉冲伺服装置(如步进电动机)时,可利用PLC实现接收和输出高速脉冲的功能,实现数字量控制,较为先进的PLC还专门开发了数字控制模块,可实现曲线插补功能,近来又推出了新型运动单元模块,还能提供数字量控制技术的编程语言,使PLC实现数字量控制更加简单。
4、数据采集监控
由于PLC主要用于现场控制,所以采集现场数据是十分必要的功能,在此基础上将PLC与上位计算机或触摸屏相连接,既可以观
察这些数据的当前值,又能及时进行统计分析,有的PLC具有数据记录单元,可以用一般个人电脑的存储卡插入到该单元中保存采集到的数据。
PLC的另一个特点是自检信号多.利用这个特点,PLC控制系统可以实现白诊断式监控,减少系统的故障,提高系统的可靠性。
模拟量闭环控制一般用PID。
需要较好的动态品质和较高的稳态精度时,可以选用PI控制方式;控制对象的惯性滞后较大时,应选择PID控制方式。
各部分的作用如下:
在P,I,D这三种控制作用中,比例部分与误差信号在时间上是一致的,只要误差一出现,比例部分就能及时地产生与误差成正比的调节作用,具有调节及时的特点。
比例系数KC越大,比例调节作用越强,系统的稳态精度越高;但是对于大多数系统,KC过大会使系统的输出量振荡加剧,稳定性降低。
控制器中的积分作用与当前误差的大小和误差的历史情况都有关系,只要误差不为零,控制器的输出就会因积分作用而不断变化,一直要到误差消失,系统处于稳定状态时,积分部分才不再变化,因此积分部分可以消除稳态误差,提高控制精度。
但是积分作用的动作缓慢,可能给系统的动态稳定性带来不良影响,因此很少单独使用。
积分时间常数TI增大时,积分作用减弱,系统的动态性能(稳定性)可能有所改善,但是消除稳态误差的速度减慢。
根据误差变化的速度(即误差的微分),微分部分提前给出较大的调节作用。
微分部分反映了系统变化的趋势,它较比例调节更为及时,所以微分部分具有超前和预测的特点。
微分时间常数增大时,超调量减小,动态性能得到改善,但是抑制高频干扰的能力下降。

实例详解S7-200SMART与PID的应用一、 PID回路控制概述PID控制器是应用最广泛的闭环控制器,它根据给定值与被控实测值之间的偏差;按照PID算法计算出控制器的输出量,控制执行机构进行调节,使被控量跟随给定量变化,并使系统达到稳定;自动消除各种干扰对控制过程的影响。
其中PID分别表示比例、积分和微分S7-200 SMART中PID功能实现方式有以下三种:PID指令块:通过一个PID回路表交换数据,只接受0.0 - 1.0之间的实数(实际上就是百分比)作为反馈、给定与控制输出的有效数值。
PID向导:方便地完成输入/输出信号转换/标准化处理。
PID指令同时会被自动调用。
根据PID算法自己编程S7-200 SMART CPU最多可以支持8个PID控制回路(8个PID 指令功能块),根据PID算法自己编程没有具体数目的限制,但是我们需要考虑PLC的存储空间以及扫描周期等影响。
PID控制是负反馈闭环控制,能够抑制系统闭环内的各种因素所引起的扰动,使反馈跟随给定变化。
PID控制算法有几个关键的参数Kc(Gain,增益)Ti(积分时间常数),Td(微分时间常数)Ts(采样时间)在S7-200 SMART中PID功能是通过PID指令功能块实现。
通过定时(按照采样时间)执行PID功能块,按照PID运算规律,根据当时的给定、反馈、比例-积分-微分数据,计算出控制量由于PID可以控制温度、压力等等许多对象,它们各自都是由工程量表示,因此有一种通用的数据表示方法才能被PID功能块识别。
S7-200 SMART中的PID功能使用占调节范围的百分比的方法抽象地表示被控对象的数值大小。
在实际工程中,这个调节范围往往被认为与被控对象(反馈)的测量范围(量程)一致。
PID 功能块只接受0.0 - 1.0之间的实数(实际上是0%--100%)作为反馈、给定与控制输出的有效数值,如果是直接使用PID功能块编程,必须保证数据在这个范围之内,否则会出错。
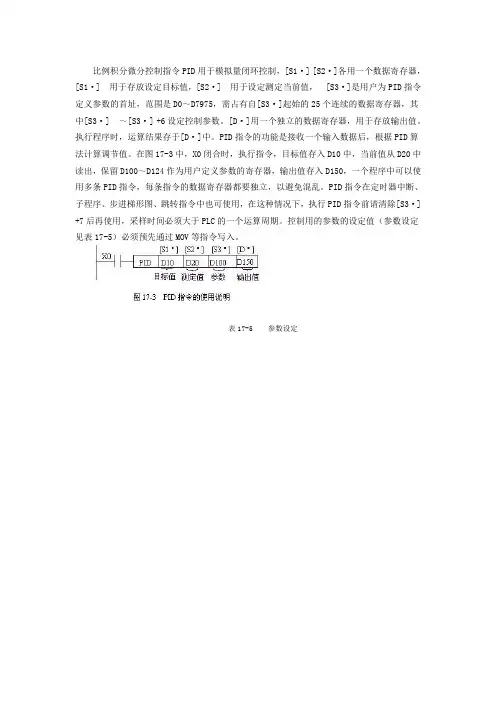
比例积分微分控制指令PID用于模拟量闭环控制,[S1·] [S2·]各用一个数据寄存器,[S1·] 用于存放设定目标值,[S2·] 用于设定测定当前值, [S3·]是用户为PID指令定义参数的首址,范围是D0~D7975,需占有自[S3·]起始的25个连续的数据寄存器,其中[S3·] ~[S3·] +6设定控制参数。
[D·]用一个独立的数据寄存器,用于存放输出值。
执行程序时,运算结果存于[D·]中。
PID指令的功能是接收一个输入数据后,根据PID算法计算调节值。
在图17-3中,X0闭合时,执行指令,目标值存入D10中,当前值从D20中读出,保留D100~D124作为用户定义参数的寄存器,输出值存入D150,一个程序中可以使用多条PID指令,每条指令的数据寄存器都要独立,以避免混乱。
PID指令在定时器中断、子程序、步进梯形图、跳转指令中也可使用,在这种情况下,执行PID指令前请清除[S3·] +7后再使用,采样时间必须大于PLC的一个运算周期。
控制用的参数的设定值(参数设定见表17-5)必须预先通过MOV等指令写入。
表17-5 参数设定。
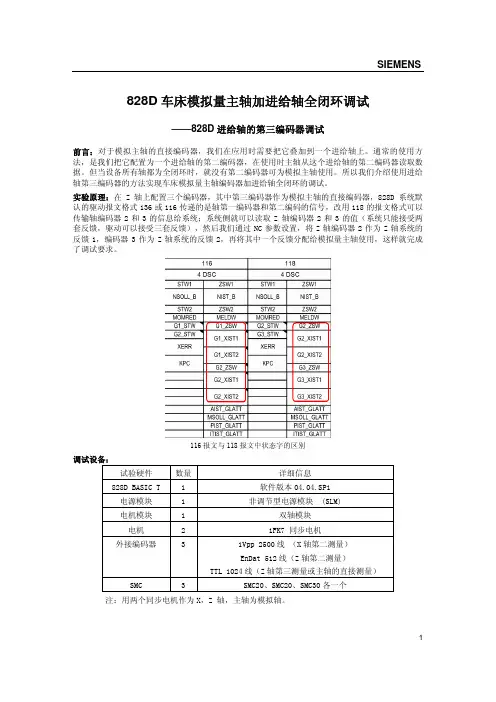
828D车床模拟量主轴加进给轴全闭环调试——828D进给轴的第三编码器调试前言:对于模拟主轴的直接编码器,我们在应用时需要把它叠加到一个进给轴上。
通常的使用方法,是我们把它配置为一个进给轴的第二编码器,在使用时主轴从这个进给轴的第二编码器读取数据。
但当设备所有轴都为全闭环时,就没有第二编码器可为模拟主轴使用。
所以我们介绍使用进给轴第三编码器的方法实现车床模拟量主轴编码器加进给轴全闭环的调试。
实验原理:在Z轴上配置三个编码器,其中第三编码器作为模拟主轴的直接编码器,828D系统默认的驱动报文格式136或116传递的是轴第一编码器和第二编码的信号,改用118的报文格式可以传输轴编码器2和3的信息给系统;系统侧就可以读取Z 轴编码器2和3的值(系统只能接受两套反馈,驱动可以接受三套反馈),然后我们通过NC参数设置,将Z轴编码器2作为Z轴系统的反馈1,编码器3作为Z轴系统的反馈2,再将其中一个反馈分配给模拟量主轴使用,这样就完成了调试要求。
116报文与118报文中状态字的区别调试设备:试验硬件 数量 详细信息828D BASIC T 1 软件版本04.04.SP1电源模块 1 非调节型电源模块 (SLM)电机模块 1 双轴模块电机 2 1FK7 同步电机外接编码器 3 1Vpp 2500线 (X轴第二测量)EnDat 512线(Z轴第二测量)TTL 1024线(Z轴第三测量或主轴的直接测量)SMC 3 SMC20、SMC20、SMC30各一个注:用两个同步电机作为X,Z 轴,主轴为模拟轴。
硬件连接示意图如下:说明:Motor Enc X为X 轴电机编码器;Direct X为X轴第二编码器;Motor Enc Z为Z 轴电机编码器;Direct Z为Z轴第二编码器;Direct Spi为SP 轴编码器调试步骤:1、硬件连接好后,系统自动进行拓扑识别。
在拓扑识别完成后,HMI 上会出现”Alarm201331: Topology:Component not assigned to a drive object, Component no.for the encoder interface”。
120研究与探索Research and Exploration ·工艺与技术中国设备工程 2017.01 (上)结合我国目前实际情况可知,PID 控制器已经在工业控制领域得到了较为广泛的应用。
与其他控制器相比,PID 控制器具有明显的计算量少、结构经典、便于参数调整等优势。
作为PID 控制的关键,其参数整定问题直接影响PID 控制的控制质量。
因此,分析西门子PLC 的PLD 参数整定问题具有一定的现实意义。
1 西门子PID 基本控制原理西门子PID 控制器的控制原理为:参照系统误差,借助PID 参数完成控制量的计算,最终实现控制功能。
具体而言,输入通过微分(D)、比例(P)以及积分(I)获得输出结果,并将输出结果传递至执行机构,由执行机构负责对某一规定对象执行控制任务。
从西门子PID 的构成来看,其中,微分部分的作用主要是提供盘查信号的变化速率,监测偏差信号的变化状况,识别偏差信号超出正常范围的征兆,准确于偏差信号由正常值转为太大之前,引入一个有效的早期修正信号,缩短系统调节时间。
而比例部分的作用则是即时完成控制系统偏差信号的反应(呈比例)。
当偏差产生后,调节器将会立即进行动作,抑制偏差控制功能的发挥。
此外,在西门子PID 控制器中,积分部分的作用以提升系统无差度以及消除静差为主。
积分的作用有效性与积分时间常数呈负相关关系,即随着积分时间常数的不断减小,积分的消除静差作用将发挥得越来越明显。
2 西门子PLC 的PID 参数整定这里主要从以下几方面入手,对西门子PLC 的PID 参数整定进行分析和研究。
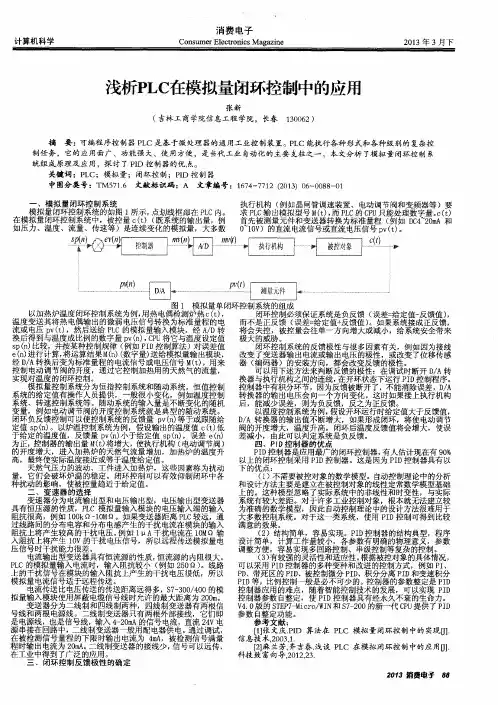
2.1 模拟量闭环控制器控制系统方面在实际运用过程中,PID 模拟量闭环控制器控制系统可产生良好的自动控制功能,其自动控制原理为:当控制系统的设定值高于反馈值参数时,系统开始产生误差,误差被输入至PID 调节器中,由调节器完成微分、比例以及积分的运算,最终得出控制信号计算结果,并将该结果输出出来,传输至执行机构中。
PLC的用途目前,PLC在国内外已广泛应用于钢铁、石油、化工、电力、建材、机械制造、汽车、轻纺、交通运输、环保及文化娱乐等各个行业,使用情况大致可归纳为如下几类。
1、开关量的逻辑控制这是PLC最基本、最广泛的应用领域,它取代传统的继电器电路,实现逻辑控制、顺序控制,既可用于单台设备的控制,也可用于多机群控及自动化流水线。
如注塑2、模拟量控制在工业生产过程当中,有许多连续变化的量,如温度、压力、流量、液位和速度等都是模拟量。
为了使可编程控制器处理模拟量,必须实现模拟量(Analog)和数字量(Digital)之间的A/D转换及D/A转换。
PLC厂家都生产配套的A/D和D/A转换模块,使可编程控制器用于模拟量控制。
3、运动控制PLC可以用于圆周运动或直线运动的控制。
从控制机构配置来说,早期直接用于开关量I/O模块连接位置传感器和执行机构,现在一般使用专用的运动控制模块。
如可驱动步进电机或伺服电机的单轴或多轴位置控制模块。
世界上各主要PLC 厂家的产品几乎都有运动控制功能,广泛用于各种机械、机床、机器人、电梯等场合。
4、过程控制过程控制是指对温度、压力、流量等模拟量的闭环控制。
作为工业控制计算机,PLC能编制各种各样的控制算法程序,完成闭环控制。
PID调节是一般闭环控制系统中用得较多的调节方法。
大中型PLC都有PID模块,目前许多小型PLC也具有此功能模块。
PID处理一般是运行专用的PID子程序。
过程控制在冶金、化工、热处理、锅炉控制等场合有非常广泛的应用。
5、数据处理现代PLC具有数学运算(含矩阵运算、函数运算、逻辑运算)、数据传送、数据转换、排序、查表、位操作等功能,可以完成数据的采集、分析及处理。
这些数据可以与存储在存储器中的参考值比较,完成一定的控制操作,也可以利用通信功能传送到别的智能装置,或将它们打印制表。
数据处理一般用于大型控制系统,如无人控制的柔性制造系统;也可用于过程控制系统,如造纸、冶金、食品工业中的一些大型控制系统。
如何使用S7-200CPU 的PID控制S7-200 能够进行PID 控制。
S7-200 CPU最多可以支持8 个PID 控制回路(8个PID 指令功能块)。
PID 是闭环控制系统的比例-积分-微分控制算法。
PID 控制器根据设定值(给定)与被控对象的实际值(反馈)的差值,按照PID 算法计算出控制器的输出量,控制执行机构去影响被控对象的变化。
PID 控制是负反馈闭环控制,能够抑制系统闭环内的各种因素所引起的扰动,使反馈跟随给定变化。
根据具体项目的控制要求,在实际应用中有可能用到其中的一部分,比如常用的是PI(比例-积分)控制,这时没有微分控制部分。
1、PID 算法在S7-200 中的实现PID 控制最初在模拟量控制系统中实现,随着离散控制理论的发展,PID也在计算机化控制系统中实现。
计算机化的PID 控制算法有几个关键的参数:●Kc:Gain,增益●Ti:积分时间常数●Td:微分时间常数●Ts:采样时间在S7-200 中PID 功能是通过PID 指令功能块实现。
通过定时(按照采样时间)执行PID 功能块,按照PID 运算规律,根据当时的给定、反馈、比例-积分-微分数据,计算出控制量。
PID 功能块通过一个PID 回路表交换数据,这个表是在V 数据存储区中的开辟,长度为36 字节。
因此每个PID 功能块在调用时需要指定两个要素:PID控制回路号,以及控制回路表的起始地址(以VB 表示)。
由于PID 可以控制温度、压力等等许多对象,它们各自都是由工程量表示,因此有一种通用的数据表示方法才能被PID 功能块识别。
S7-200中的PID 功能使用占调节范围的百分比的方法抽象地表示被控对象的数值大小。
在实际工程中,这个调节范围往往被认为与被控对象(反馈)的测量范围(量程)一致。
PID 功能块只接受0.0 - 1.0 之间的实数(实际上就是百分比)作为反馈、给定与控制输出的有效数值,如果是直接使用PID 功能块编程,必须保证数据在这个范围之内,否则会出错。
PLC技术在机械电气控制装置中的应用摘要:随着科技水平的进步,PLC技术在机械电气控制装置中运用广泛。
机械电气控制装置能够更有效、更直接完成控制任务,但纯机械的控制装置缺乏自动化技术的应用,导致在使用过程中存在反应时间过长和反应速度过慢等情况,且控制系统一旦出现故障,就无法自动完成故障检查和故障排除。
为解决以上问题,可在机械电气控制装置中广泛应用PLC技术。
该技术能提高机械电气控制装置的自动性,使装置满足自动检查、自动排除故障以及快速反应等需求。
关键词:PLC技术;机械电气;控制装置;应用引言PLC技术较为灵活多变,而且可以进行编程,方便操作。
在工业电气自动化控制系统中引入该技术,可以提升设备控制效果,减少人力、物力资源消耗,并能够实现远程操作,促进整体工业生产效率的提升。
PLC技术的抗干扰能力较强,能够强化继电器的逻辑和自动控制效果,对电气自动化控制中的控制故障进行直观化解决,保障电气自动化控制系统的高效化运营。
1概念PLC技术,全称可编程序控制器,采取一类可编程的存储器,利用其内部微处理器,通过与互联网等信息化、自动化水平高的技术相结合(通信技术、计算机技术、自动控制技术等),从而将其应用到工业的各个领域中进行相关控制的一种技术装置。
PLC技术研发初期是准备应用于电气工程自动化领域中,但由于受到各种因素影响,在20世纪70年代这项技术被应用于汽车工业制造中,并且取得了较好的应用效果。
随着经济发展、科技进步,促使PLC技术应用范围逐渐扩大,被应用于商业、电气工程等领域中,技术自动化水平更高。
从PLC系统组成来看,主要由电源、CPU、通信模块、接口电路、功能模块等组成,除了系统输入输出端口,其余仅需软件便可实现连接。
在PLC技术应用过程中,如果电气自动化控制要求标准发生变化,工作人员只需修改系统程序便可实现最新的控制要求,从而为电气工程自动化控制带来便利条件。
2特征2.1实用性特点PLC可编程控制器的体积较小,重量较低,功能消耗量少,便于进行应用和安装,同时,具有容量大和运算速度快的特点,功能十分丰富,实用性较强。
矿井通风系统------基于PLC模拟量的变频器闭环调速控制摘要随着电力电子技术及控制技术的发展,使得交流变频调速在工业电机拖动领域得到了广泛应用。
由于PLC的功能强大、容易使用、高可靠性,常常被用来作为现场现场数据的采集和设备的控制。
本文介绍了 PLC控制变频调速系统在矿井局部通风机中的应用。
以瓦斯浓度为主控参数,通过A/D采样模块采集瓦斯浓度,送入PLC与设定值进行运算,输出再经过D/A转换控制变频器 ,来调节局部通风机电机转速实现最优控制 ,达到安全监控与节能目的。
关键字:PLC;变频器;PID控制;局部通风机;A/D转换;D/A转换AbstractWith the power electronics and control technology, making the AC variable speed motor drive in the industry has been widely applied. Since the PLC powerful, easy to use, high reliability, are often used as a field-site data collection and device control.This article describes the frequency control system PLC control local fan in the mine in the application. To gas concentration as the main control parameters through the PLC control frequency, to adjust the fan motor speed to achieve optimal local control, to security monitoring and energy conservation purposes.Keyword:PLC; inverter; PID control; local fan;A / D converter; D / A converter目录0中英文摘要 (1)1引言 (3)1.1 PLC概述 (3)1.2设计目的 (3)1.3设计内容 (3)1.4设计实现目标 (3)2系统总体方案设计 (4)2.1系统硬件配置及组成原理 (4)2.2系统接线图设计 (6)3控制系统设计 (7)3.1控制程序流程图设计 (7)3.2控制程序设计思路 (7)4系统调试及结果分析 (8)4.1系统调试步骤 (8)4.2遇到的问题以及解决方案 (9)4.3结果分析 (9)5结束语 (9)6参考文献 (10)1 引言1.1 PLC概述可编程控制器(PLC)是以计算机技术为核心的通用自动化控制装置,它的功能性强,可靠性高,编程简单,使用方便,体积小巧,近年来在工业生产中得到广泛的应用,被誉为当代工业自动化主要支柱之一。