模拟量控制驱动器
- 格式:pdf
- 大小:645.96 KB
- 文档页数:8
SD15MT SD20MT SD30MT SD50MN本说明书主要为用户提供驱动器的使用方法、系统参数、技术指标。
由于使用不当或错误的操作,可能会导致意外事故发生并影响产品的性能和使用寿命,为使本产品更好地发挥其性能和更好地为您服务,请您务必在产品使用前认真阅读本说明书。
在产品使用过程中如遇到不解的地方请查阅说明书或拨打我们的技术支持电话。
请您将对交流伺服驱动器的意见和更高要求告知我们,我们会在最短的时间内满足您的要求。
【注】☆由于产品的改进,手册内容可能变更,恕不另行通知。
☆驱动单元及电机内不包含任何维修配件,请勿私自拆卸;对驱动单元及电机的任何改动将使其保修权利失效;本公司也不对由此引起的后果承担任何责任。
☆阅读本手册前,请遵守以下安全防范说明。
警示标志:————危险:表示错误的操作将可能导致人员伤亡!————小心:表示错误的操作将可能对人员造成伤害并损坏设备或产品!————注意:表示错误的操作将可能损坏设备或产品!危险:Danger本产品的设计和制造并非是为了使用在对人身安全有威胁的机械和系统中。
用户的机械和系统选用本产品时,须在设计和制造中考虑安全防护措施,防止因操作不当或本产品异常而引发意外事故。
伺服驱动器即使断电后,高压仍会保持一段时间,断电后5分钟内请勿拆卸电线,不得触摸端子排。
参与拆卸与维修的人员必须具备相应的专业知识和工作能力。
小心:损坏或有故障的产品不可投入使用。
必须按产品储运环境条件储存和运输。
搬运伺服电机时,不得拖曳电线、电机轴和编码器。
伺服驱动器及伺服电机不得承受外力及撞击。
避免振动,严禁承受冲击。
受损或零件不全时,不得进行安装。
ll.必须安装在有足够防护等级的控制柜内。
必须与其它设备间保留足够的间隙。
必须有良好的散热条件。
防止尘埃、腐蚀性气体、导电物体、液体及易燃易爆物质侵入。
安装务必牢固,防止因振动松脱。
防止液体侵入损坏电机和编码器。
禁止敲击电机和电机轴,以免损坏编码器。
伺服电机是在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
在不同场景下,伺服电机的控制方式各有不同,在进行选择之前你需要先了解伺服电机是三种控制方式各有其特点,下面小编就给大家介绍一下伺服电机的三种控制方式。
伺服电机控制方式有脉冲、模拟量和通讯控制这三种1、伺服电机脉冲控制方式在一些小型单机设备,选用脉冲控制实现电机的定位,应该是最常见的应用方式,这种控制方式简单,易于理解。
基本的控制思路:脉冲总量确定电机位移,脉冲频率确定电机速度。
都是脉冲控制,但是实现方式并不一样:第一种,驱动器接收两路(A、B路)高速脉冲,通过两路脉冲的相位差,确定电机的旋转方向。
如上图中,如果B相比A相快90度,为正转;那么B相比A相慢90度,则为反转。
运行时,这种控制的两相脉冲为交替状,因此我们也叫这样的控制方式为差分控制。
具有差分的特点,那也说明了这种控制方式,控制脉冲具有更高的抗干扰能力,在一些干扰较强的应用场景,优先选用这种方式。
但是这种方式一个电机轴需要占用两路高速脉冲端口,对高速脉冲口紧张的情况,比较尴尬。
第二种,驱动器依然接收两路高速脉冲,但是两路高速脉冲并不同时存在,一路脉冲处于输出状态时,另一路必须处于无效状态。
选用这种控制方式时,一定要确保在同一时刻只有一路脉冲的输出。
两路脉冲,一路输出为正方向运行,另一路为负方向运行。
和上面的情况一样,这种方式也是一个电机轴需要占用两路高速脉冲端口。
第三种,只需要给驱动器一路脉冲信号,电机正反向运行由一路方向IO信号确定。
这种控制方式控制更加简单,高速脉冲口资源占用也最少。
在一般的小型系统中,可以优先选用这种方式。
2、伺服电机模拟量控制方式在需要使用伺服电机实现速度控制的应用场景,我们可以选用模拟量来实现电机的速度控制,模拟量的值决定了电机的运行速度。
模拟量有两种方式可以选择,电流或电压。
电压方式,只需要在控制信号端加入一定大小的电压即可。
实现简单,在有些场景使用一个电位器即可实现控制。
目录一、旋转电机与GTHD (2)1、光电编码器 (2)2、旋转电机参数 (3)3、初始化配置流程 (5)4、驱动器调试流程 (11)一、模拟量(速度)控制模式 (11)二、脉冲(位置)模式控制 (16)二、直线电机与GTHD (20)1、光栅尺 (20)2、直线电机参数 (20)3、初始化配置流程 (23)4、驱动器调试流程 (24)一、模拟量(速度)控制模式 (24)二、脉冲(位置)模式控制 (29)备注 (32)一、旋转电机与GTHD1、光电编码器使用普通旋转伺服电机(交流永磁伺服旋转电机)需要用到光电编码器(一种反馈器件,提供位置、速度等信息),光电编码器有两种---增量式编码器和绝对式编码器。
两者的区别在于前者只能知道相对于上电位置的相对位置,后者可以知道当前的绝对位置(位置唯一)。
一般旋转伺服电机都会使用到增量式编码器,说到编码器就需要知道编码器的一项重要性能指标---分辨率(mencres,单位:LRP。
也叫刻线数),也可以用每转脉冲数表示。
电机光电编码器的分辨率有下列几种,10进制的有2000/5000/10000,二进制的有1024/2048/4096/8192。
编码器计数是通过A、B两项信号的信号沿得到的,一个周期内有四个沿,所以每转脉冲数等于分辨率乘以四,而A、B两项信号相差90度。
2、旋转电机参数使用编码器时需要用到下面几个参数:feedbacktype的值须与电机实际反馈类型(接线方式)相符,对于增量式光电编码器反馈,该值设为2menctype的值跟接线有关,主要看有没有接I(index)向和Halls (霍尔:确定转子位置,从而知道输入电流状态)信号。
大多数旋转电机都是带有I向和Halls信号,所以menctype值设为0,而不带Halls 信号的menctype值设为2,这个时候就需要会用到一种代替Halls信号作用的寻找转子的软件方式phasefind(驱动器第一次上伺服时会自动寻找,不断电情况下一般不需要再次寻找,除非电机飞车)。
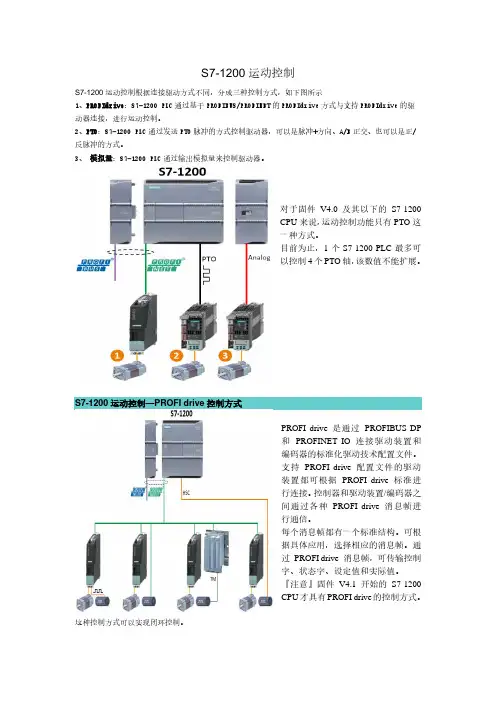
S7-1200运动控制S7-1200运动控制根据连接驱动方式不同,分成三种控制方式,如下图所示1、PROFIdrive:S7-1200 PLC通过基于PROFIBUS/PROFINET的PROFIdrive方式与支持PROFIdrive的驱动器连接,进行运动控制。
2、PTO:S7-1200 PLC通过发送PTO脉冲的方式控制驱动器,可以是脉冲+方向、A/B正交、也可以是正/反脉冲的方式。
3、模拟量:S7-1200 PLC通过输出模拟量来控制驱动器。
对于固件V4.0及其以下的S7-1200CPU来说,运动控制功能只有PTO这一种方式。
目前为止,1个S7-1200 PLC最多可以控制4个PTO轴,该数值不能扩展。
S7-1200 运动控制—PROFI drive控制方式PROFI drive 是通过PROFIBUS DP和PROFINET IO 连接驱动装置和编码器的标准化驱动技术配置文件。
支持PROFI drive 配置文件的驱动装置都可根据PROFI drive 标准进行连接。
控制器和驱动装置/编码器之间通过各种PROFI drive 消息帧进行通信。
每个消息帧都有一个标准结构。
可根据具体应用,选择相应的消息帧。
通过PROFI drive 消息帧,可传输控制字、状态字、设定值和实际值。
『注意』固件V4.1开始的S7-1200CPU才具有PROFI drive的控制方式。
这种控制方式可以实现闭环控制。
S7-1200 运动控制--PTO控制方式PTO的控制方式是目前为止所有版本的S7-1200 CPU都有的控制方式,该控制方式由CPU向轴驱动器发送高速脉冲信号(以及方向信号)来控制轴的运行。
这种控制方式是开环控制。
S7-1200 运动控制--模拟量控制方式固件V4.1开始的S7-1200 PLC的另外一种运动控制方式是模拟量控制方式。
以CPU1215C为例,本机集成了2个AO点,如果用户只需要1或2轴的控制,则不需要扩展模拟量模块。
0-20ma模拟量输出功能在各种工业领域中有着广泛的应用场景,其作用主要是将数字信号转换为模拟电流输出,从而实现对各种控制设备的精确控制。
下面将重点介绍0-20ma模拟量输出功能的应用场景及其在各个领域中的具体应用。
一、工业自动化领域1. 工业生产过程控制0-20ma模拟量输出功能可以应用于工业生产过程中的各种参数控制,如温度、压力、流量等。
通过对参数进行精确的模拟量输出控制,可以实现对生产过程的精准控制,提高生产效率和产品质量。
2. 机械设备控制在工业机械设备控制中,0-20ma模拟量输出功能可以用于控制各种传感器、执行器和驱动器,如电动阀门控制、电机转速控制等。
这对于确保机械设备的稳定运行和精准控制至关重要。
二、环境监测领域1. 大气环境监测在大气环境监测领域,0-20ma模拟量输出功能可以应用于各类气体传感器、温湿度传感器等环境监测设备,实现对大气环境参数的实时监测和控制,为环境保护和治理提供重要数据支持。
2. 水质监测对于水质监测设备来说,0-20ma模拟量输出功能也起到了至关重要的作用。
通过对水质传感器输出的模拟信号进行精确控制,可以实现对水质波动的实时监测和控制,确保水质稳定和安全。
三、能源领域1. 发电厂参数控制在发电厂中,各种参数控制对于保障发电设备的安全稳定运行具有至关重要的意义。
0-20ma模拟量输出功能可以应用于发电厂的各类参数控制设备,如温度控制、压力控制等,确保发电设备在正常参数范围内运行。
2. 能源监测与控制能源监测与控制是实现节能和环保的重要手段。
0-20ma模拟量输出功能可以应用于各种能源监测设备,如电能表、水能表等,实现对能源使用情况的精准监测和控制,为能源节约和环保做出积极贡献。
0-20ma模拟量输出功能在各种工业领域中有着广泛的应用场景,其精确的模拟量输出控制功能为各种传感器、执行器和监测设备的精准控制提供了重要支持,促进了工业自动化、环境监测和能源领域的发展和进步。
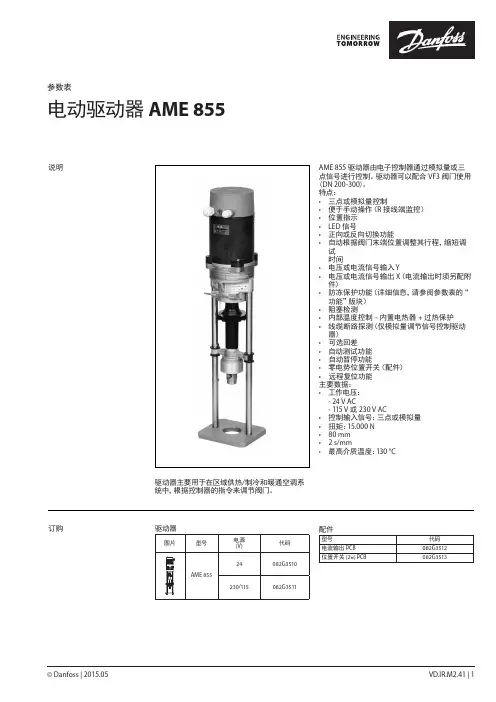
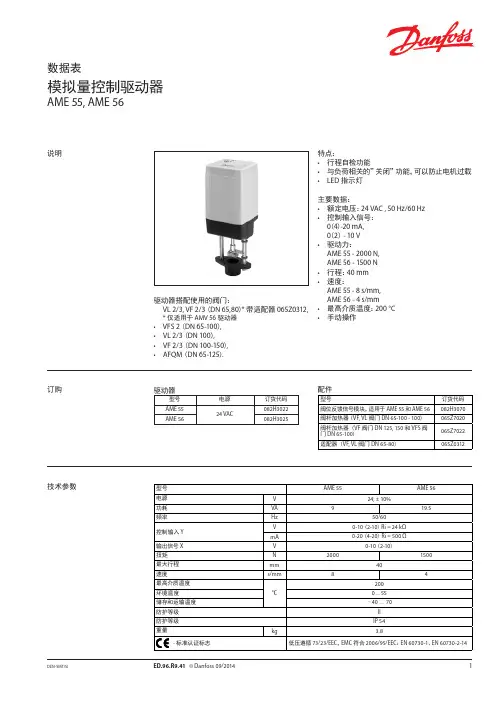
电动驱动器 AME 855参数表说明驱动器主要用于在区域供热/制冷和暖通空调系统中,根据控制器的指令来调节阀门。
AME 855 驱动器由电子控制器通过模拟量或三点信号进行控制。
驱动器可以配合 VF3 阀门使用(DN 200-300)。
特点:• 三点或模拟量控制• 便于手动操作(R 接线端监控)• 位置指示• L ED 信号• 正向或反向切换功能• 自动根据阀门末端位置调整其行程,缩短调试 时间• 电压或电流信号输入 Y • 电压或电流信号输出 X (电流输出时须另配附件)• 防冻保护功能(详细信息,请参阅参数表的“功能”版块)• 阻塞检测• 内部温度控制 – 内置电热器 + 过热保护• 线缆断路探测(仅模拟量调节信号控制驱动器)• 可选回差• 自动测试功能• 自动暂停功能• 零电势位置开关(配件)• 远程复位功能主要数据:• 工作电压: - 24 V AC- 115 V 或 230 V AC • 控制输入信号:三点或模拟量• 扭矩:15.000 N • 80 mm • 2 s/mm• 最高介质温度:130 °C订购配件型号代码电流输出 PCB 082G3512位置开关 (2×) PCB082G3513驱动器图片型号电源(V)代码AME 85524082G3510230/115082G3511参数表电动驱动器 AME 855技术参数电源V24 (AC) 或 115 / 230 (AC); ±10%功耗VA 50 (24V) 63 (230V)频率Hz50 / 60控制输出 Y 1)0 – 10 V DC; 77 kOhm 2 – 10 V DC; 77 kOhm 0 – 20 mA; 510 Ohm 4 – 20 mA; 510 Ohm反馈输出 X 0 – 10 V DC; ≥1200 Ohm; I = 8 mA(最高)0 – 20 mA; ≤500 Ohm4 – 20 mA; ≤500 Ohm扭矩N15000最大行程mm80速度s/mm2最高介质温度°C 130环境温度–10 … +50储存和运输温度-20 … +65防护等级II防护等级IP 54重量kg11 (24V) 11,4 (230V)手动操作机械-标准认证标识指令 2006/42/EC委员会指令 2004/108/EC 委员会指令 2006/95/EC1)当 Y 信号选定为 2-10 V DC 或 4-20 mA 时,X 信号的起始点为 0-10V DC 或 0-20 mA废弃处理弃置之前,必须将驱动器拆解,并将元件分类。

西威模拟量控制参数表配LCBII主板+AMCB2一、概述:西威变频器是由意大利生产的一种高性能的驱动器,在国内最先是由西子OTIS应用的,在匹配同步电机方面有着独特的优越性:首先该驱动器的PI功能相当丰富,可以细分为4段(包括一个零速PI),而且宽度可调,所以在匹配无齿电机时可以不加予负载信号,启动不会有倒溜的情况发生;其次它内部有两套自整定程序:一是电机参数自整定,它可以自动的整定出电机的相间电感和电阻常数,避免了由于电机厂家提供电机参数不全而导致调试难度的提高;另一个是无齿定位自整定,该程序是检测编码器和电机磁极相对应的位置。
二、配线说明:U1,V1,W1变频器的进线输入U2,V2,W2变频器的输出+BR1,-C 接制动电阻1,2 模拟量输入端12(ENERGE)使能信号13 (FWD)正转14(REV)反转19(COM)公共端36(BRAKE)37(EXT Fault) 39(LZ)提前开门80,82(DRIVE OK)故障输出83,85(DRIVE OK)安全回路编码器:XS插座分频卡EXP-E上的XF0端子分频卡上的跳线S1,S2决定分频系数:1分频(S1-OFF,S2-OFF),2分频(S1-OFF,S2-ON),4分频(S1-ON,S2-OFF),8分频(S1-ON,S2-ON)编码器选用海德汉的1387型号关于1387的接线请注意:将插件正对着看,上面有凸出部分为TOP, 上层为b, 下层为a, 从右到左分别使1到7;其接线如下:6b(A+), 2a(A-), 3b(B+), 5a(B-), 4b(R+), 4a(R-), 7b(C+), 1a(C-), 2b(D+), 6a(D-), 1b(5V), 5b(0V)三、菜单和参数:(参数以西子同步主机为例)主机参数:曳引轮直径:400mm, 梯速:1.0m/s, 曳引比:2:1额定转速:95r/min 功率:5KW 电流:11A转矩:550 频率:19HZMenus:(一级目录)1. MONITOR (监控)2. STARTUP (启动)(必须要设定)3. TRAVEL (驱动)(必须要设定)4. REGULATION PARAM(调节参数)(必须要设定)5. I-O CONFIG (I-O配置)(必须要设定)6. ALARM CONFIG (报警配置)7. COMMUNICATION (通讯)8. APPL CARD CONFIG (APPL卡配置)9. CUSTOM FUNCTIONS (客户功能)10. SERVICE(服务功能:无齿自动定位用)(必须要设定)二级目录介绍STARTUP:1、Startup config ( 启动配置)(1).Enter setup modeDRIVE DATAMains voltage 400VAmbient temp 40Switching freq 8kHzSpd ref/fbk res 0.03125rpm(SIN/COS编码器要设为该值)MOTOR DATARated voltage 340 VRated current 11 ARated speed 95 rpmPole pairs(极对数)12 请注意该值为极数的一半:P=f*120/N=11*120/95=24Torque constant 550/11=55 Nm/A(根据额定转矩除以额定电流算出来)EMF constant (反电势)V*s(该参数设为0,电机自学习时可自动读入)Stator resist (定子阻值)ohm(该参数设为0,电机自学习时可自动读入)LsS inductance (阻抗值)H(该参数设为0,电机自学习时可自动读入)电机自整定时,请一定要将上面3个参数设为0,否则可能会导致变频器有给定信号而没有输出电流的情况发生。

1配置:①驱动器MDX61B… ②编码器板DER11B③同步伺服电机-带增量型编码器…CM…RH1M(L)2系统架构:L1L2L3PECM / CMP(Z)同步伺服电机1. 水平驱动2. 升降驱动硬件接线:水平驱动(对于CM..71-112机座号同步伺服电机,通常制动器为380V AC带BME制动整流块!)3PLC驱动器输出U,V,W驱动器处编码器连接为D型插头需配9芯针型插头RefRef-CosCos-Sin+Sin-TF/TH/KTYTF/TH/KTY-编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞SEW-编码器电缆型号拖缆用:1995901非拖缆用:1995898增量型编码器:Resolver信号硬件接线:水平驱动(对于CM..56-63机座号同步伺服电机,通常制动器为24VDC!)4PLC型插头驱动器输出U,V,W硬件接线:升降驱动!! (对于SEW-71机座号以上同步伺服电机,通常制动器为380V AC带BME制动整流块!)(建议:制动器采用快速制动;PLC保护制动)(防止溜车,及意外坠落)5PLC驱动器输出U,V,WD型插头需配9芯针型插头RefRef-CosCos-Sin+Sin-TF/TH/KTYTF/TH/KTY-编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞SEW-编码器电缆型号拖缆用:1995901非拖缆用:1995898增量型编码器:Resolver信号6/CONTROL.INHIBIT端子功能:在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能:使用MOTION STUDIO软件配置电机详见PPT:使用MOTION STUDIOS软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好详见PPT:使用MOTION STUDIO软件设定参数100→设为Unipolar/fixed setpoint;(单极性模拟量/固定点设定)101→设为Terminals;(端子控制)112→设为10 V, reference maximum speed;(0-10V模拟量控制)或4-20 mA, reference maximum speed;(4-20 mA模拟量控制)与S11开关的拨码位置必须对应,否则驱动器将会按最大速度输出130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)160 →设为所需值;(接通n11/n21固定速度端子时,电机运行速度)161 →设为所需值;(接通n12/n22固定速度端子时,电机运行速度)162 →设为所需值;(接通n13/n23固定速度端子时,电机运行速度)200 →设为所需值;(电机的速度环增益,系统会按电机配置时,输入的负载情况,设定建议值)201 →设为所需值;(电机的速度环时间常数,建议值40-80)301 →设为0;(输出最小转速);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警);600 →设为CW/stop;(正转)601 →设为CCW/stop;(反转)602 →设为Enable/stop;(输出使能)603 →设为n11/n21;(固定速度1)604 →设为n12/n22;(固定速度2)7620 →设为/Fault;(故障报警)621 →设为Rotating field ON;(电机是否运行)700 →设为Servo;(伺服速度闭环控制模式)731 →制动器释放时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)模拟量控制电压或电流信号选择电磁干扰屏蔽安装要求伺服控制器至伺服电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属8夹可靠紧固,大面积接地编码器线需采用专用带屏蔽层双绞线,并用金属夹将屏蔽层可靠紧固接地,屏蔽层从头至尾不应有断层。
伺服控制的三种模式一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式,速度控制和转矩控制都是用模拟量来控制的.位置控制是通过发脉冲来控制的.具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择. 如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。
如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。
如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。
那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。
如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。
一般说驱动器控制的好不好,每个厂家的都说自己做的最好,但是现在有个比较直观的比较方式,叫响应带宽。
当转矩控制或者速度控制时,通过脉冲发生器给他一个方波信号,使电机不断的正转、反转,不断的调高频率,示波器上显示的是个扫频信号,当包络线的顶点到达最高值的70.7%时,表示已经失步,此时的频率的高低,就能显示出谁的产品牛了,一般的电流环能作到1000Hz 以上,而速度环只能作到几十赫兹。
换一种比较专业的说法:运动伺服一般都是三环控制系统,从内到外依次是电流环速度环位置环。
1、首先电流环:电流环的输入是速度环PID调节后的那个输出,我们称为“电流环给定”吧,然后呢就是电流环的这个给定和“电流环的反馈”值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
常见英文缩写(DCS、PLC)HMI—Human Machine Interface(人机界面)HTML—Hyper Text Markup Language(超文本链接标示语言)CM——Control Module控制模块SCM——Sequential Control Module顺序控制模块CPM——Control Processing Module控制处理模块CEE——Control Execution Environment控制执行环境CNI——Control Net Interface控制网络接口C200——Control processor控制处理器RM——Redundancy Module冗余模块IOMs——input/output Modules输入/输出模块SCE——Simulation Control Module模拟控制模块ACE——Application Control Module应用控制模块IOLIM——IO Link Interface Module接口模块FIM——Fieldbus Inerface Module现场总线模块PMIO—Process Manager Input/Output流程管理器输入/输出FTA-Field Termination AssembliesIOP——Input/Output Processor (card)输入/输出处理器(卡)ERDB——Engineering Repository Database工程数据库EMDB—Enterprise model database企业模型数据库RTDB—Real Time Database实时数据库ODBC—Open Database Connectivity开放式数据库连接SQL—Structured Query Language结构化查询语言PV—Process Value工艺价值SCADA—Supervisory control and data acquisition监督控制和数据采集FTE-fault tolerant Ethernet容错以太网CP-control processor控制处理器CNI-control net interface控制网接口FTEB-fault tolerant Ethernet bridge容错以太网桥RM-redundancy module冗余模块FIM-fieldbus interface module现场总线接口模块OPC-OLE for process control用于过程控制ACE-application control environment(应用控制环境)DSA-distributed system architecture分布式系统架构CEE-control execute environment控制执行环境ES-CE --Console Extension Station控制扩展控制站ES-F --Experion Flex StationES-C --Experion Console StationFTA--Field Termination Assembly (for Serial Interface) CDA server :Contorl Data Access Server 控制数据接入服务器OPC:OLE for process controlDSA:disbuted system Architecture 分布式系统结构FTE:fault tolerant Ethernet 容错以太网RTD:热电阻T/C:热电偶PIM:pulse Input Module 脉冲输入模块SIM:Serial Interface Module 串口接口模块SIEMENS PLC常用英语缩写表集散控制系统——Distributed Control System(DCS)现场总线控制系统——Fieldbus ControlSystem(FCS)监控及数据采集系统——Supervisory Control And Data Acqusition(SCADA)可编程序控制器——Programmable LogicController(PLC)可编程计算机控制器——Programmable Computer Controller(PCC)工厂自动化——Factory Automation(FA)过程自动化——Process Automation(PA)办公自动化——Office Automation(OA)管理信息系统——Management InformationSystem(MIS)楼宇自动化系统——Building AutomationSystem人机界面——Human Machine Interface(HMI)工控机——Industrial Personal Computer(IPC)单片机——Single Chip Microprocessor计算机数控(CNC)远程测控终端——Remote Terminal Unit(RTU)上位机——Supervisory Computer图形用户界面(GUI)人工智能——Artificial Intelligent(AI)智能终端——Intelligent Terminal模糊控制——Fuzzy Control组态——Configuration仿真——Simulation冗余——Redundant客户/服务器——Client/Server网络——Network设备网——DeviceNET基金会现场总线——foundation fieldbus(FF)现场总线——Fieldbus以太网——Ethernet变频器——Inverter脉宽调制——Pulse Width Modulation(PWM)伺服驱动器——Servo Driver软起动器——Soft Starter步进——Step-by-Step控制阀——Control Valver流量计——Flowmeter仪表——Instrument记录仪—— Recorder传感器——Sensor智能传感器——Smart Sensor智能变送器——Smart Transducer虚拟仪器——Virtual Instrument 主站/从站——Master Station/Slave station 操作员站/工程师站/管理员站——Operator Station/Engineer Station/Manager StationDCS画面常用常用缩写词语1ST1级FRQ频率A报警FSH末级过热器ADS自动调度系统FSSS炉膛安全监测系统AGC自动发电机控制FW给水AH空气预热器FWP给水泵AS轴向位移GC高压调门控制ATC汽轮机自动控制GEN发电机AUTO自动GV(高压)调节汽门AUX辅助的HH高高BASE基本HAV暖通BCP炉水循环泵HDR联箱,集箱BD排污HP高压缸BF锅炉跟随HTR加热器BFP锅炉给水泵IC中压调门控制BMCR锅炉最大连续出力ID标志,标识BMP燃烧器管理系统IDF引风机BOP轴承油泵IMP冲动式(级)BP旁路INCR提高,增加BRG轴承INTERM定期,间断BTG锅炉-汽机-发电机IV中压调门C切换LL低低CAF冷却风机LDC负荷指令计算机CAMP控制+报警+监测+保护LOP顶轴油泵CCCW闭式循环冷却水Lp低压CCS协调控制系统LSH低温过热器CDSR凝汽器LUB润滑油COND凝结MANU手动(方式)CON连续的MCR最大连续出力COOR连续的MCS模拟量控制系统CORR校正,修正MEH小型汽轮机电液调节CRT显示器MFT主燃料失去保护CRH低温再热器MIN最小CSH包覆过热器MS主蒸汽CW循环水MW兆瓦D NO编号,第。
②异步电机-不带型编码器…DRE(N)(S)...12系统架构:DRE(N)(S)...异步电机L1L2L3PE1. 水平驱动2. 升降驱动硬件接线:水平驱动34DRE(N)(S)...异步电机驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆制动整流块2,3端为输入,输入电压见电机铭牌左下脚;PLC从驱动器至电机处的动力线中间不要加入接线端子或隔离开关,会将线缆的屏蔽层隔断,导致干扰问题硬件接线:升降驱动!! (建议:制动器采用快速制动;PLC 保护制动)(防止溜车,及意外坠落)5驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆从驱动器至电机处的动力线中间不要加入接线端子或隔离开关,会将线缆的屏蔽层隔断,导致干扰问题制动整流块2,3端为输入,输入电压见电机铭牌左下脚;请将出厂时接在制动整流块5脚上的蓝色线调到4脚PLCDRE(N)(S)...异步电机/CONTROL.INHIBIT端子功能:在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
FAULT RESET端子功能:当遇到非正常情况,伺服系统报警停机,在排除故障原因后,可给FAULT RESET端子一个脉冲信号,使伺服系统退出报警状态:使用MOTION STUDIO软件配置电机详见PPT:使用MOTION STUDIOS软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好详见PPT:使用MOTION STUDIO软件设定参数100→设为Unipolar/fixed setpoint;(单极性模拟量/固定点设定)101→设为Terminals;(端子控制)112→设为10 V, reference maximum speed;(0-10V模拟量控制)或4-20 mA, reference maximum speed;(4-20 mA模拟量控制)与S11开关的拨码位置必须对应,否则变频器将会按最大速度输出130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)160 →设为所需值;(接通n11/n21固定速度端子时,电机运行速度)161 →设为所需值;(接通n12/n22固定速度端子时,电机运行速度)162 →设为所需值;(接通n13/n23固定速度端子时,电机运行速度)301 →设为60;(输出最小转速)(保证全力矩转速);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警);600 →设为CW/stop;(正转)601 →设为CCW/stop;(反转)6602 →设为Enable/stop;(输出使能)603 →设为n11/n21;(固定速度1)604 →设为n12/n22;(固定速度2)620 →设为/Fault;(故障报警)621 →设为Rotating field ON;(电机是否运行)700 →设为VFC;(电压矢量控制模式)731 →制动器释放时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)模拟量控制:电压或电流信号选择电磁干扰屏蔽安装要求驱动器器至电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠7紧固,大面积接地8。
闭环运动控制参数介绍S7-1200 支持通过PROFIdrive或者模拟量输出(AQ)方式控制伺服驱动器实现闭环控制。
与开环运动控制相比以下新元素将添加到组态导航中:编码器、模数、位置监控(定位监控、跟随误差和静止信号)、控制回路等。
下面介绍闭环控制新增的组态选项。
其余部分可参考开环组态,链接。
基本参数-常规图1 基本参数①“驱动器”“模拟驱动装置接口”:通过模拟量输出连接驱动装置;例如通过CPU 本体 AQ 通道控制驱动器。
“PROFIdrive”:通过PROFINET/PROFIBUS 连接驱动装置。
控制器和驱动器之间通过PROFIdrive报文进行通信。
例如,通过PROFINET 连接 V90,或者通过PROFINET 连接 ET200SP 接口模块,使用该站点的 PTO 2模块发脉冲控制驱动器。
图1 中示例选择“PROFIdrive” 连接驱动装置。
②“仿真”:在下拉列表中,选择是否仿真驱动器和编码器。
模拟量驱动接口或 PROFIdrive驱动装置均可仿真。
在仿真模式下,不需要对驱动装置和编码器进行硬件配置。
在仿真模式下,设定值不会输出到驱动器,也不从驱动器/编码器读取实际值。
硬件限位开关和原点开关不产生任何影响。
注意:该仿真模式是用在装载到真实CPU 的,而并非装载到 PLCSIM 的,PLCSIM 不支持仿真S7-1200运动控制。
基本参数-驱动器图2 驱动器①选择PROFIdrive 驱动装置:“数据连接”:在下拉列表中,选择连接接口为“驱动器”;“驱动器”:在“驱动器”域中,选择一个已经组态的 PROFIdrive 驱动器。
注意: 如果为“数据连接”选择了“数据块”,“驱动器”选项将变为“数据块”,选择一个之前创建的数据块,数据块包含数据类型为“PD_TELx”的变量结构(“x”为所用的报文编号)。
具体可参考链接。
②“与驱动装置进行数据交换” “驱动器报文”:在下拉列表中,选择该驱动器的报文,必须与驱动器的设备组态相一致。