浙大考研资料-浙大控制原理1-5Review
- 格式:pptx
- 大小:328.14 KB
- 文档页数:28

2
1-2 常用过程控制理论及应用
一、过程控制理论
过程控制理论,原自于经验的PID。
过程控制系统的分析和设计,主要应用频率响应特性,这种理论对于过程控制工程技术人员都比较熟悉
这种理论对于过程控制工程技术人员都比较熟悉。
到了1960年代,空间技术的发展,控制系统用状态方程来描述,这种方法是用来开发各种优化控制理论的基础。
这来描述这种方法是用来开发各种优化控制理论的基础。
这样,使得原有的频率响应分析方法要作改进,使之适合于多变量的复杂的控制系统设计问题。
因此,现代控制系统设计不再分频域和时域,发展成为统一的理论。
为了介绍方便,现仍将其分成频域与时域来介绍,如表1所示此表列举了典型的控制技术应用于不同系统的表示所示。
此表列举了典型的控制技术应用于不同系统的表示:控制系统设计、控制系统构成和辨识的方法。
先控技应课程学任务
先进控制技术及应用课程教学任务
目次内容时间(次)上课人1导论、预测控制技术1苏宏业2软测量技术1苏宏业3变结构控制技术1苏宏业4容错控制技术1苏宏业5综合自动化技术4荣冈6直流调速技术毛维杰
2
7交流调速技术4毛维杰8位置随动系统与传感
2毛维杰
技术
参考书
•《先进控制技术及应用》,王树青等,化学工业出版社,2001年7月
《电力拖动自动控制系统运动控制•——
系统》(第3版),陈伯时,机械工业出版社,2003年7月
社。

《自动控制原理》(科目代码845)考试大纲
特别提醒:本考试大纲仅适合2009年报考信息学院控制科学与工程学系、并且专业课考<自动控制原理>课程的考生。
该门课程的满分为150分。
1. 考研建议参考书目:
(1) 周春晖主编.《化工过程控制原理》(第二版). 北京:化学工业出版社. 1998.4
或者:
(2) 胡寿松主编. 自动控制原理. 国防工业出版社或科学出版社
2. 基本要求
(1) 了解自动控制的一般概念:自动控制的基本原理与组成、分类;
(2) 掌握动态系统的数学模型:控制系统的微分方程模型、传递函数模型、状态空间模型、结构图与信号流图以及各种数学模型之间的对应关系;
(3) 掌握线性系统的时域分析法:控制系统时间响应的性能指标、一阶、二阶及高阶系统的时域分析、控制系统的状态方程求解与分析;线性系统的稳定性分析、稳态误差计算;
(4) 线性系统的根轨迹法: 根轨迹法的基本概念、根轨迹绘制的基本法则及推广、利用根轨迹进行系统性能的分析;
(5) 掌握线性系统的频率分析法:线性系统的频率特性概念、开环系统的典型环节分解与开环频率特性曲线、频率域稳定判据以及稳定裕度;
(6) 一般性了解线性系统的校正方法;
(7) 掌握线性离散系统的分析与校正:离散系统的基本概念、Z变换理论、离散系统的数学模型、稳定性与稳态误差分析、动态性能分析;
(8) 掌握线性系统的状态空间分析与综合:线性系统的可控性与可观测性、线性定常系统的线性变换与标准形、线性定常系统的状态反馈控制器设计与状态观测器设计;
(9) 非线性控制系统:了解非线性控制系统与描述函数方法、掌握李亚普诺夫稳定性分析方法。
![第四章-1-仿真图[1]自动控制原理 浙江大学考研资料](https://uimg.taocdn.com/8e39306daf1ffc4ffe47ac02.webp)
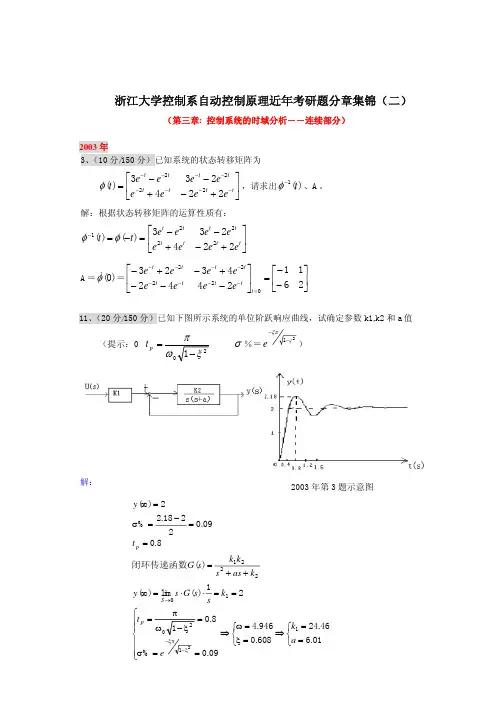
浙江大学控制系自动控制原理近年考研题分章集锦(五)(第六章:采样控制系统部分) 反反复反复反复反复反复反复反复2023年9、(15分)简朴计算题,直接计算出结果即可。
(每小题5分)(1). 请求出)3.1)(18.0()1()(2222+++-++=z z z z z z z z X 的初值与终值。
解:(1)运用初值定理可求出其初值为1。
由于X(z)有4个极点,且有2个极点位于单位圆外,故终值为 不存在或∞。
10、(10分)先求解差分方程,再求其终值y (∞)。
][3][2]1[3]2[n u n y n y n y n =++++, y[0]= 0,y[1]=0;解:(1)对方程取Z 变换并代入初始条件整理得Y(z) 反Z 变换,得:][3201][)2(51][)1(41][n u n u n u n y nn n ⋅+-+--= (2) 由于Y (z )有根在单位圆外,故系统不稳定,终值将趋于无穷大。
12、(15分)如图所示离散系统,问:当系统的T S /T 比值存在关系)6.11ln(TT T S -=时,系统的输出将出现什么情况?解:系统的开环脉冲传递函数为)(/6.1)(/6.1])1(1[6.1])1(1[]6.1[)(//11T Ts T Ts S T e z T e z T z z Ts Z z Ts e Z z G S ------=-=+=+⋅==--=-=-=--TTT eK b z T6.16.1116.1)6.11ln( 2023年九、(15分/150分)先用Z 变换法求解下面的差分方程,再求其终值e (∞)。
0)(2)1(3)2(=++++k e k e k e 已知,e (0) =0, e (1)=1解:(1)据z 变换的超前定理,对差分方程两边取z 变换)1)(2(23)(2++=++=z z zz z z z E k k z z Z z X Z kT x )2()1()]2111[()]([)(11---=+-+==--(2)由于E (z )有单位圆外的根,故终值为无穷大。
自动控制原理Principle of Automatic Control
浙江大学控制科学与工程学系
第三章CHAPTER 3
连续时间控制系统的时域分析
当λ=σ+j ωd 时,系统暂态响应函数为A e σt sin(ωd t +φ)。
对于阻尼正弦情况,时间常数通过表征包络线A e σt 的参数σ来定义。
时间常数T 等于
n
T ζωσ
1
1
=
=
t
Ae
σ-t
Ae
σ(欠阻尼)
(过阻尼)
)
sin(φωσ+t Ae
d t
,12
1k k d
n n j j λσωζωωζ+=±=-±-σ
t o
最大偏离量:M p 峰值时间:T p
上升时间:T r ,t o 调节时间:T s
•衰减振荡过渡过程:应用0-100% 上升时间t o •非振荡过渡过程:应用10-90% 上升时间T r
最大偏离量
控制系统阶跃响应
上升时间
峰值时间
调节时间
稳态误差
假定系统在单位阶跃输入作用前都处于静止状态,而且系统输出量及其各阶导数都等于零(即零初始条件)
第2峰B ′
ω(y
R(s)Y(s)
选择增益K和参数p,使得百分比超调量。
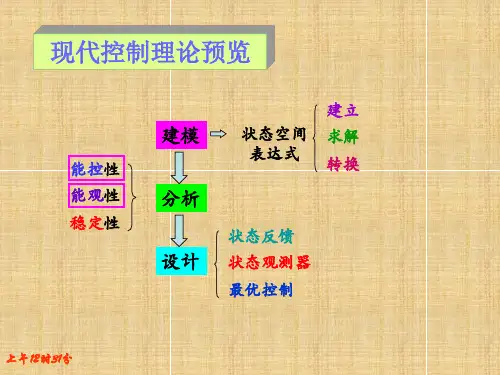
![第五章-1-劳斯稳定性判据[1]自动控制原理_浙江大学考研资料.doc](https://uimg.taocdn.com/03a91a5dcaaedd3383c4d36a.webp)
第五章-1-劳斯稳定性判据[1]自动控制原理_浙江大学考研资料自动控制理论浙江大学控制科学与工程学系芳周立芳徐正国第五章控制系统特性1? 输入变量、输出变量? 方程的阶独立储能元件? 输入输出模型及其一般形式微分方程传递函数方块图? 状态空间模型? 线性化第二章回顾2第二章列写系统方第三章回顾? 稳态响应? 暂态响应? 系统暂态(动态)? 时间响应性能指标? 状态方程的全解3第三章微分方程的4第四章回顾? 系统整体传递函数? 仿真图? 信号流图? 从传递函数到状态空间模型的转换第四章系统表示方5第五章关键词? 系统稳定性? 劳斯稳定性判据? 相对稳定性? 系统型别? 稳态误差? 稳态误差系数6第五章要点? 引言? 劳斯稳定性判据? 数学量与物理量? 反馈系统型别? 稳态误差系数? 稳态误差系数的应用? 非单位反馈系统? 小结控制科学与工程学系引言? 引言? 系统稳定性8? 开环及闭环传递函数具有某些基本性质,这些性质为反馈控制系统的暂态及稳态分析提供了帮助。
开环及闭环传递函数具有某些基本性质,这些性质为反馈控制系统的暂态及稳态分析提供了帮助。
? 衡量反馈控制系统性能的五个重要指标? 稳定性? 稳态误差的存在性及量级? 可控性? 可观性? 参数灵敏性引言引言基于状态空间模型取决于系统的特征方程,有多种分析方法。
取决于系统的特征方程,有多种分析方法。
9? 劳斯稳定性判据为判别系统稳定性提供了途径,并且不需要直接计算系统特征方程的根。
为判别系统稳定性提供了途径,并且不需要直接计算系统特征方程的根。
? 稳态误差可以根据单位反馈系统(或等价的单位反馈系统)的(或等价的单位反馈系统)的开环传递函数获得,其作为一种性能指标,为系统分类提供了依据。
获得,其作为一种性能指标,为系统分类提供了依据。
引言引言10? 我们将介绍一种评价系统稳定性的有力工具劳斯- 赫尔维茨方法,该方法能够使我们在不计算特征方程根的确切值的情况下,推断位于复平面,该方法能够使我们在不计算特征方程根的确切值的情况下,推断位于复平面右半平面的特征根个数。