曲面的三个基本形式的系数矩阵之间关系的证明
- 格式:doc
- 大小:510.00 KB
- 文档页数:9
曲面的三个基本形式的系数矩阵之间关系的证明邢家省,王拥军(北京航空航天大学数学与系统科学学院,数学、信息与行为教育部重点实验室,北京100191)摘 要: 给出3R 中曲面的3 个基本形式的系数矩阵之间关系的一个直接 证明, 并由此得到曲面的3 个基本形式之间的关系表示及其一些 应用.关键词: 第三基本形式; 法曲率的最值; 测地挠率 中图分类号: O186. 11 文献标识码: A曲面的第三基本形式可以用第一和第二基本形式来表示是一个重要结论[19]-,对其证明引起了人们的极大兴趣.我们在已有方法的基础上,经过综合分析和领会,发现了一套自然合理的推导转换的过程,给出了直接简单自然的证明过程.1曲面的第三基本形式用第一和第二基本形式表示的证明设曲面:(,)r r u v ∑= 是2C 类的正则曲面.曲面∑上一点(,)P u v 处的单位法向量为n.我们采用文献[1-3]中的记号.收稿日期:基金项目:国家自然科学基金资助项目(11171013),北京航空航天大学教改项目基金资助作者简介:邢家省(1964--)男,河南泌阳人,博士,副教授,从事数学教学和科研工作.Email:xjsh@ .令,,u u u v v v e n n f n n g n n =⋅=⋅=⋅ ,,,e f g 称为曲面∑的第三类基本量.用III 表示曲面∑的第三基本形式[13]-: 22()2()e du fdudv g dv III=++ .曲面的第三基本形式可以用第一和第二基本形式来表示,在文献[1-3]中是在曲面上选取了曲率线网作为坐标曲线网后,给予证明的.我们在曲面上选取正交曲线族为坐标曲线网下,给出证明.选取曲面∑上的正交曲线族为坐标曲线网.设曲面:(,)r r u v ∑= 上的坐标曲线网是正交网. 则有0u v F r r =⋅=,曲面的第一基本形式22()()E du G dv I =+, 曲面的第二基本形式22()2()L du Mdudv N dv II=++,高斯曲率2LN M K EG -=,平均曲率2LG NE H EG +=.因为1,n n ⋅=所以0,0u v n n n n ⋅=⋅= ,从而,,u u v n r r共面,,,v u v n r r共面,设12u u v n a r a r =+,则有12,L M a a E G =-=-; 设12v u v n b r b r =+,则有12,M N b b E G=-=- . 于是2212u u u u v v e n n a r r a r r =⋅=⋅+⋅22222L G M E L G LNE LNE M EHL KEEG EG++-+===-,1122u v u u v v f n n a b r r a b r r =⋅=⋅+⋅ 2LGM NEMHM EG+==,2212v v u u v vg n n b r r b r r =⋅=⋅+⋅22222M G N E LGN N E LNG M G HN KGEG EG++-+===-,代入第三基本形式,可得到2H K III=II -I .2 曲面的三个基本形式的系数矩阵之间关系设曲面:(,)r r u v ∑= 是2C类的正则曲面.曲面∑上一点(,)P u v 处的单位法向量为n.定理1[4,5]设E F A F G ⎛⎫= ⎪⎝⎭,L M B M N ⎛⎫= ⎪⎝⎭, ef C fg ⎛⎫= ⎪⎝⎭分别是曲面在(,)P u v 点处的第一、第二、第三基本形式的系数矩阵. 则有 1C BA B -= , (1)证明 因为1,n n ⋅=所以0,0u v n n n n ⋅=⋅= ,从而,,u u v n r r 共面,,,v u v n r r 共面;存在1212,;,a a b b ,使得12u u v n a r a r =+,12v u v n b r b r =+;写成矩阵形式为 1212u u v v n r a a n r b b ⎛⎫⎛⎫⎛⎫= ⎪ ⎪⎪⎝⎭⎝⎭⎝⎭, 记1212a a D b b ⎛⎫=⎪⎝⎭,则有u u v v n r D n r ⎛⎫⎛⎫= ⎪ ⎪⎝⎭⎝⎭, 两边左乘(),T u u v v r r r r ⎛⎫= ⎪⎝⎭,得到()(),,u u u v u v v v n r r r D r r n r ⎛⎫⎛⎫= ⎪ ⎪⎝⎭⎝⎭, 即u u u v u u u v v u v v v u v v n r n r r r r r D n r n r r r r r ⋅⋅⋅⋅⎛⎫⎛⎫= ⎪ ⎪⋅⋅⋅⋅⎝⎭⎝⎭, 由基本量的计算公式,得L M E F D M N F G --⎛⎫⎛⎫= ⎪ ⎪--⎝⎭⎝⎭,于是成立B DA -=,从而有1D BA -=-,所以得出1u u v v n r BA n r -⎛⎫⎛⎫=- ⎪ ⎪⎝⎭⎝⎭,u u u v v u v v n n n n e f C nn n n f g ⋅⋅⎛⎫⎛⎫== ⎪ ⎪⋅⋅⎝⎭⎝⎭()(),,u u T T u v u v v v n r n n D r r D DAD n r ⎛⎫⎛⎫=== ⎪ ⎪⎝⎭⎝⎭111()()BA A A B BA B ---=--=,故成立1C BA B -= .3 法曲率最值的特征值及特征向量性质考虑法曲率n k 的最值和最值方向的特征值、特征向量性质.令E F A F G ⎛⎫= ⎪⎝⎭,L M B MN ⎛⎫= ⎪⎝⎭,x X y ⎛⎫= ⎪⎝⎭;则有 n k II=I2222()2()()2()L du Mdudv N dv E du Fdudv G dv ++=++(,)(,)du du dv B dv du du dv A dv ⎛⎫⎪⎝⎭=⎛⎫⎪⎝⎭. 因此,最大值、最小值问题转化为讨论()T f X X BX =在条件1T X A X =下的最大值、最小值问题。
第四章 曲面的第二基本形式与曲面上的曲率§5 曲面上的曲率概念利用上一节所作的准备,围绕曲面弯曲状况的刻画,本节将引入曲面上的基本的和重要的曲率概念,并简要讨论相关的几何体.一.主曲率定义1 曲面 S 上的点 P 处的法曲率关于切方向的两个最值,分别称为曲面 S 在点 P 处的主曲率;使得法曲率达到最值的两个切方向,分别称为曲面 S 在点 P 处的主方向.注记1 ① Weingarten 变换的特征值和特征方向,分别是曲面的主曲率和主方向.② 当两个主曲率 κ1(P ) ≠ κ2(P ) 时,曲面在点 P 处有且仅有正交的两组主方向,每一组的单位化向量分别就是Weingarten 变换的单位正交特征向量.而当两个主曲率 κ1(P ) = κ2(P ) 时,曲面在点 P 处的任何非零切向都是主方向,Weingarten 矩阵 ω(P ) = κ1(P )I 2 ,即 Ω(P ) = κ1(P )g (P ) .主曲率和主方向的计算,自然归结为Weingarten 变换的特征值和特征方向的计算,也就是Weingarten 矩阵的特征值和特征方向的计算.即: ① 对于主曲率的算法,当易知Weingarten 矩阵 ω 之时,方程为 (4.3) 式,或直接写为(5.1) |ω − λI 2 | = 0 ;等价地,当易知系数矩阵 Ω 和 g 之时,其方程可变形为(5.2) |Ω − λg | = 0 .② 对于主方向的算法,各种等价算式为a = a i r i ≠ 0 为主方向,即非零切方向 a 1:a 2 为主方向⇔ ∃λ , ∋(a 1, a 2)ω = λ(a 1, a 2) , (a 1, a 2) ≠ (0, 0)⇔ ∃λ , ∋(a 1, a 2)Ω = λ(a 1, a 2)g , (a 1, a 2) ≠ (0, 0)⇔ det. ⎝⎛⎠⎞(a 1, a 2)Ω (a 1, a 2)g = 0⇔(a2)2−a1a2 (a1)2g11g12g22Ω11Ω12Ω22= 0 .主方向所对应的微分方程通常写为(5.3)(d u2)2−d u1d u2 (d u1)2g11g12g22Ω11Ω12Ω22= 0 .定义2若曲面S在点P处的两个主曲率相等,则称点P为曲面S上的一个脐点.若曲面S处处为脐点,则称曲面S为全脐曲面.若脐点处的主曲率为零,则称之为平点;若脐点处的主曲率不为零,则称之为圆点.注记2全脐曲面S的法曲率只与点有关而不依赖于切向选取,故只有平面和球面两类;平面上各点为平点,球面上各点为圆点.全脐曲面主方向所对应的微分方程是蜕化的恒等式.二.Gauss曲率和平均曲率定义3对于正则曲面S,其在点P处的两个主曲率的乘积Κ,称为其在点P处的Gauss曲率或总曲率;其在点P处的两个主曲率的算术平均值H,称为其在点P处的平均曲率.注记3① 注意到(4.4)-(4.5) 式,Gauss曲率和平均曲率分别具有用Weingarten矩阵或两个基本形式系数的表达式,分别列为(5.4)Κ=|ω|=|Ω||g|=LN−M2EG−F2,(5.5) H= tr.ω2=LG− 2MF+NE2(EG−F2).② 主曲率方程 (4.3) 式现可改写为(5.6)λ2− 2Hλ+Κ= 0 ;其中H 2−Κ= (κ1−κ2)24≥ 0 .③ Gauss曲率在容许参数变换下不变;平均曲率在保向参数变换下不变,在反向参数变换下变号.④ 当曲面三阶连续可微时,Gauss曲率和平均曲率分别是连续可微函数;此时,两个主曲率函数(5.7)κi=H±H2−Κ , i= 1, 2处处连续,并且在非脐点处连续可微.⑤ 平均曲率等于法曲率按切方向的积分平均值(留作习题). ⑥ 平均曲率不是等距不变量.反例如圆柱面和平面.例1 证明可展曲面的Gauss 曲率 Κ ≡ 0 .证明 对可展曲面 S 的直纹面参数化 r (u , v ) = a (u ) + v l (u ) ,由可展定义得知 n v ≡ 0 ,故其第二基本形式系数满足M = − r u •n v ≡ 0 , N = − r v •n v ≡ 0 ,于是Κ = LN − M 2 EG − F 2≡ 0 . □ 在上例中,若取准线使 a ′•l ≡ 0 且 |l | ≡ 1 ,则可展曲面 S 的第一和第二基本形式系数矩阵同时对角化,Weingarten 矩阵则为特征值对角阵,而且(5.8) κ1 = L E , κ2 ≡ 0 .三.Gauss 映射和第三基本形式Gauss 在考察曲面的弯曲程度刻画时,注意到曲面的单位法向在单位球面上的行为对于曲面弯曲状况的反映,并进一步明确了两者的依赖程度,进而在曲面论中做出了卓有成效的工作.观察熟知的一些曲面,比如平面、圆柱面、圆锥面、椭球面、双叶双曲面、双曲抛物面等等,可以直观感受到单位法向不同的行为和曲面不同的弯曲状况之间有着密切联系.图4-5定义4 对于 C 3 正则曲面 S : r (u 1, u 2) 及其单位法向量场 n (u 1, u 2) ,曲面 S 到以原点为心的单位球面 S 2(1) 上的映射(5.9) G : S →S 2(1) r (u 1, u 2)→G (r (u 1, u 2)) = n (u 1, u 2)称为曲面 S 的Gauss 映射.二次微分形式(5.10) Ⅲ = d n •d n称为曲面S的第三基本形式.性质① n1×n2=Κr1×r2.② |Κ(P)|=limU收缩至P A(G(U))A(U),其中P∈U⊂S , U为单连通区域,A(G(U)) 是G(U)⊂S2(1) 的面积,A(U) 是U⊂S的面积.③ Ⅲ− 2HⅡ+ΚⅠ= 0 .证明① 由Weingarten公式得n1×n2= [−(ω11r1+ω12r2)]×[−(ω21r1+ω22r2)]=|ω|r1×r2=Κr1×r2.② A(U) =∫∫r−1(U)| r1×r2| d u1d u2 ,A(G(U)) =∫∫r−1(U) | n1×n2| d u1d u2=∫∫r−1(U)|Κ|| r1×r2| d u1d u2.而由积分中值定理,∃P*∈U使∫∫r−1(U) |Κ|| r1×r2| d u1d u2=|Κ (P*)|∫∫r−1(U)| r1×r2| d u1d u2.故而lim U收缩至P A(G(U))A(U)= limP*→P|Κ (P*)|=|Κ (P)|.③ 结论用系数矩阵等价表示为(Ω g−1)g(Ω g−1)T− 2HΩ+Κ g≡ 0⇔Ω g−1Ω− 2HΩ+Κ g≡ 0⇔Ω g−1Ω g−1− 2HΩ g−1+Κ I2≡ 0⇔ωω− (tr.ω)ω+|ω|I2≡ 0 .而最后的等式对于二阶方阵总成立(用特征值理论则知是显然的),用元素计算可直接验证为ωi kωk j− (tr.ω)ωi j+|ω|δi j=ωi1ω1j+ωi2ω2j− (ω11+ω22)ωi j+ (ω11ω22−ω12ω21)δi j≡ 0 . □习 题⒈对于螺面r= (u cos v , u sin v , u+v) ,试求:① 主曲率κ1和κ2;② Gauss曲率和平均曲率.⒉试求球面的Gauss曲率和平均曲率与球面半径的关系.⒊试证:平均曲率等于法曲率按切方向的积分平均值,即 2πH(P) =∫2πκ(P, θ) dθ.⒋试证:直纹面的Gauss曲率处处非正.⒌ 设正则曲面S: r(u1, u2) 当常数μ足够小时 1 − 2μH+μ2Κ> 0 .按参数相同作对应曲面 S*: r*(u1, u2) =r(u1, u2) +μn(u1, u2) ,其中n为曲面S的单位法向量场.试证:① S和S* 在对应点具有相同的单位法向和法线;② S和S* 在对应点的Weingarten矩阵具有关系式ω* =ω (I2−μω )−1;③ S和S* 在对应点的Gauss曲率和平均曲率具有关系式Κ* =Κ1 − 2μH+μ2Κ,H* =H−μΚ1 − 2μH+μ2Κ;④ S的曲率线对应于S* 的曲率线.⒍ 已知曲面S在一点处沿着一组等分周角的m个切方向的法曲率分别为κn(1), …,κn(m),m> 2 .试证:S在该点的平均曲率H=κn(1)+…+κn(m)m.⒎ 试证:曲面S的第三基本形式恒为零的充要条件为S是平面.。
高斯—波涅公式的应用邢家省,王拥军(北京航空航天大学数学与系统科学学院,数学、信息与行为教育部重点实验室,北京100191)摘要:考虑曲面上高斯—波涅公式的应用问题,对有关结果给予直接的证明,并列举了一些实例.关键词: 高斯—波涅公式,高斯曲率,测地曲率中图分类号: O186. 11 文献标识码: AThe Application of the Gauss–Bonnet FormulaXing Jiasheng Wang Y ongjun(Department of Mathematics, LMIB of the Ministry of Education, BeihangUniversity ,Beijing 100191,China)Abstract:Using the Gauss–Bonnet t heorem, we give a direct proof of some relevant results and listed some examples.Keywords:Gauss–Bonnet formula , Gauss curvature,geodesic curvature高斯—波涅公式是微分几何中的重要定理[14]-,它描述了曲面上多边形的内角和与曲面的高斯曲率及边界曲线上的测地曲率之间的关系.对该定理的证明和推广引起了人们持续不断的兴趣,定理结果的应用也被人们发掘出来[14]-.我们对常见的能解决的问题结果给出整理,给予直接的证明,列举了一些实例,丰富高斯—波涅公式的应用.微分几何中其它相关问题的研究可见文献[5-12].收稿日期:基金项目:国家自然科学基金资助项目(11171013),北京航空航天大学教改项目基金资助作者简介:邢家省(1964--)男,河南泌阳人,博士,副教授,研究方向:偏微分方程、微分几何.1. 光滑边界单连通区域上的Gauss-Bonnet 公式的应用设曲面:(,)Sr r u v =是3C 类正则曲面. 曲面S 上的高斯曲率为K ,曲面上的曲线的测地曲率为g k ,曲面上的面积微元为d A ,曲线的弧长微分为ds .区域D 的边界记为D ∂.定理1(Gauss-Bonnet 公式)[14]- 设区域D 是曲面S 上的一个单连通区域,如果D∂是一条光滑曲线,则有2g DDK dA k ds π∂+=⎰⎰⎰, (1)推论1[14]- 设区域D 是曲面S 上的一个单连通区域,如果D ∂是一条光滑曲线,并且D ∂是曲面上的测地线,即曲线D ∂上的测地曲率0g k =,则有2DKdA π=⎰⎰ .推论2[14]- 设曲面S 是一个单连通的封闭曲面,则有4SK dA π=⎰⎰.证明 用一条光滑的封闭曲线C 把曲面S 分成两个部分1S 和2S , 利用定理1,有112g S S K dA k ds π∂+=⎰⎰⎰, 222g S S K dA k ds π∂+=⎰⎰⎰,由于1S ∂和2S ∂的定向相反,12||g S g S k k =-,把上两式相加后,得到4SK dA π=⎰⎰.例1[14]- 设S 是半径为R 的球面,此时有21K R=,自然成立4SK dA π=⎰⎰ .例2 设S 是椭球面2222221x y z abc++=,曲面上的高斯曲率为K ,求SKdA ⎰⎰.解 由于椭球面S 是一个封闭地曲面,利用推论2,则有4SK dA π=⎰⎰ .推论3[14]- 在高斯曲率非正的单连通曲面上, 不存在光滑的闭测地线.证明 设曲面S 是一高斯曲率非正的单连通曲面, 若其上存在一条光滑的闭测地线C , 则C 的测地曲率0gk =, 设C 在曲面S 所围的区域为D ,由Gauss-Bonnet 公式(1),知2DKdA π=⎰⎰,这与S上的高斯曲率0K ≤ 矛盾.注 推论3 中必须要求C 所围成的区域是单连通的, 否则命题不成立. 例如在旋转单叶双曲面上(它的高斯曲率0K < )存在着一条光滑闭测地线, 即曲面上的最小纬圆.2 分段光滑边界单连通区域上的Gauss-Bonnet 公式的应用定理2 (Gauss-Bonnet 公式) [14]- 设C 是有向曲面S 上的一条由n 段光滑的曲线组成的简单封闭曲线, 它由n段光滑曲线1,,n C C 所组成, 而这些光滑曲线段在交接处的外角为(1,,)i i n θ= , 曲线C 所包围的区域D 是曲面S 上的一个单连通区域,那么成立112inng iDC i i K dA k ds θπ==++=∑∑⎰⎰⎰,12ng iDDi K dA k ds θπ∂=++=∑⎰⎰⎰, (2)若用(1,,)i i n α= 表示这些光滑曲线段在交接处的内角,则有1()2ng i DDi K dA k ds παπ∂=++-=∑⎰⎰⎰, (3)推论4[14]- 如果曲线C 中每段光滑曲线i C 是测地线, 则在由测地线段所围成的单连通测地n边形区域D 中, 成立如下公式12niDi K dA θπ=+=∑⎰⎰; (4)若用i α表示测地n边形的外角i θ 所对应的内角, 则有1(2)niDi n K dA απ==-+∑⎰⎰, (5 )例3 当曲面S 是平面时, 因为0K = , 于是(5 )式即平面几何中多边形内角之和的公式. 如当 3n =时就得到: 三角形三内角之和等于π. 推论5[14]- 如果D ∂是曲面S 上的一个测地三角形, 即三条测地线所围成的三角形,则有 31i Di K dA απ==+∑⎰⎰, (6)例4[14]- 若曲面S 上的高斯曲率是常数K ,则曲面S 上的一个测地三角形∆三内角之和为123KdA KA αααππ∆++=+=+⎰⎰,其中A 是这个测地三角形∆的面积.进而, 当S 是正常曲率曲面(如球面) 时, 0K > , 所在正常曲率曲面上的测地三角形三内角之和大于π; 而当S 是负常曲率曲面(如伪球面) 时, 0K <, 所以在负常曲率曲面上的测地三角形三内角之和小于π.例5[14]-在单位球面上若两条大圆相交于南北极且相交处的内角为α, 试求其所围区域的面积.解 由1K =,利用(5)式,得 2(22)()DKdA D απσ=-+=⎰⎰,于是所围面积为2α推论6[14]- 设D 是曲面S 上的一个四边形区域,其内角为(1,2,3,4)i i α=,边界D ∂由光滑四边(1,2,3,4)i C i =构成,则有44112ig iDC i i K dA k ds απ==+=-∑∑⎰⎰⎰定理3[14]- 设有定了向的封闭曲面S ,且 S 能被剖分成几个四边形,而且各顶点正好聚集四个四边形,则成立 0SK dA =⎰⎰.证明 设曲面S 被剖分成n 个四边形(1,2,,)i D i n = ,曲面四边形i D 的边界由四边(1,2,3,4)ij C j =组成,内角为(1,2,3,4)ij j α=,利用推论6,可得44112iijg ijD C j j K dA k ds απ==+=-∑∑⎰⎰⎰,(1,2,,)i n = ,由条件可知4110ijng C i j k ds ===∑∑⎰,4112niji j n απ===∑∑,于是有10inD i K dA ==∑⎰⎰,即成立 0SK dA =⎰⎰.例6 设环面∑:((sin )cos ,(sin )sin ,cos )r b a b a a ϕθϕθϕ=++ ,其中a b <是正常数,参数0,2θϕπ≤≤。

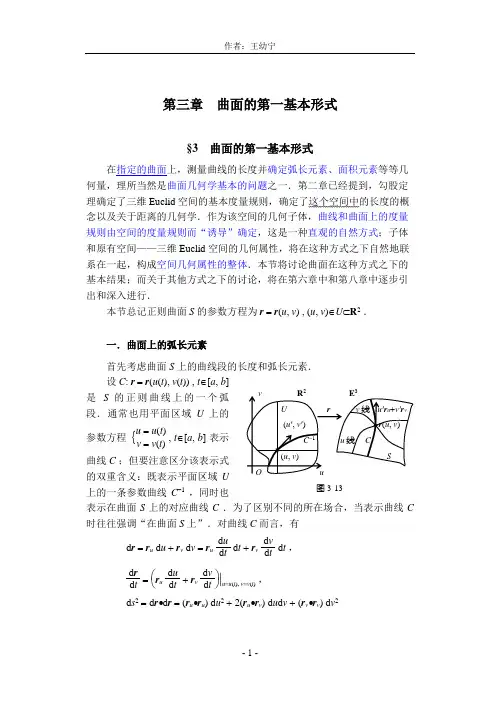
第三章 曲面的第一基本形式§3 曲面的第一基本形式在指定的曲面上,测量曲线的长度并确定弧长元素、面积元素等等几何量,理所当然是曲面几何学基本的问题之一.第二章已经提到,勾股定理确定了三维 Euclid 空间的基本度量规则,确定了这个空间中的长度的概念以及关于距离的几何学.作为该空间的几何子体,曲线和曲面上的度量规则由空间的度量规则而“诱导”确定,这是一种直观的自然方式;子体和原有空间——三维 Euclid 空间的几何属性,将在这种方式之下自然地联系在一起,构成空间几何属性的整体.本节将讨论曲面在这种方式之下的基本结果;而关于其他方式之下的讨论,将在第六章中和第八章中逐步引出和深入进行.本节总记正则曲面 S 的参数方程为 r = r (u , v ) , (u , v )∈U ⊂R 2 .一.曲面上的弧长元素首先考虑曲面 S 上的曲线段的长度和弧长元素.设 C : r = r (u (t ), v (t )) , t ∈[a , b ]是 S 的正则曲线上的一个弧段.通常也用平面区域 U 上的参数方程 {u = u (t )v = v (t ), t ∈[a , b ] 表示曲线 C ;但要注意区分该表示式的双重含义:既表示平面区域 U上的一条参数曲线 C -1 ,同时也表示在曲面 S 上的对应曲线 C .为了区别不同的所在场合,当表示曲线 C时往往强调“在曲面 S 上”.对曲线 C 而言,有d r = r u d u + r v d v = r u d u d t d t + r v d v d td t , d r d t = ⎝⎛⎭⎫r u d u d t + r v d v d t | u =u (t ), v =v (t ) , d s 2 = d r •d r = (r u •r u ) d u 2 + 2(r u •r v ) d u d v + (r v •r v ) d v 2图3-13= d r d t • d r d t d t 2 = [ |r u |2 ⎝⎛⎭⎫ d u d t 2 + 2(r u •r v ) ⎝⎛⎭⎫ d u d t d v d t + |r v |2 ⎝⎛⎭⎫ d v d t 2 ]d t 2 . 按照经常通用的记号,记曲面上的量(3.1) E = E (u , v ) = r u •r u = |r u |2 , F = F (u , v ) = r u •r v , G = G (u , v ) = r v •r v = |r v |2 ,则进一步对曲线 C 有d s 2 = d r •d r = [E (u , v ) d u 2 + 2F (u , v ) d u d v + G (u , v ) d v 2 ]|u =u (t ), v =v (t ) = [E ⎝⎛⎭⎫ d u d t 2 + 2F ⎝⎛⎭⎫ d u d t d v d t + G ⎝⎛⎭⎫ d v d t 2 ]d t 2 , 此时取 d s = |d r d t| d t = E ⎝⎛⎭⎫ d u d t 2 + 2F ⎝⎛⎭⎫ d u d t d v d t + G ⎝⎛⎭⎫ d v d t 2 | u =u (t ), v =v (t ) d t , 则有 s (b ) - s (a ) = ⎰b ad s d t d t = ⎰b a | d r d t | d t = ⎰b a E ⎝⎛⎭⎫ d u d t 2 + 2F ⎝⎛⎭⎫ d u d t d v d t + G ⎝⎛⎭⎫ d v d t 2 | u =u (t ), v =v (t ) d t .由此可见,使用平面区域 U 上的参数方程以及曲面的相应量,就可以得到曲面上的曲线的弧长元素和弧段长度;至于曲面及其上的曲线的位置向量如何,在上述算式中并不直接影响结果.曲面上的量对其上曲线的影响程度,将在进行进一步抽象之后,得到更明确的了解.对此应注意体会.二.第一基本形式定义1 对正则曲面 S : r = r (u , v ) , (u , v )∈U ⊂R 2 ,称二次微分式(3.2) Ⅰ = d s 2 = E (u , v ) d u 2 + 2F (u , v ) d u d v + G (u , v ) d v 2为曲面 S 的第一基本形式,或称线素,其中系数由 (3.1) 式给出.注记: 曲面的第一基本形式系数也称为其第一基本量. 用进一步的几何语言来说,第一基本形式是由 E 3 的欧氏度量在曲面上所诱导出来的一种Riemann 度量.按照定义,曲面第一基本形式d s 2 = d r •d r 的几何意义可用逼近的观点解释为:切向微元 d r 是位置差向量 [r (u +d u , v +d v ) - r (u , v )] 的线性主部,而弧长元素 d s = |d r | 是相应两点之间的距离微元的主部(略去的是高阶无穷小).可证(留作习题)第一基本形式在容许参数变换下不变,且在刚体运动下不变;因而确实是曲面的几何量.从定义出发,第一基本形式的计算较为简单;但这是关于曲面的最基本和最重要的计算,一定要熟练掌握.下例展示了基本运算途径;同时,所得到的结论也是基本的.例1 已知平面 ∏: r (u , v ) = r 0 + u a + v b ,其中三个常向量 r 0, a , b 满足规范条件 |a | = |b | = 1 , a •b = 0 .观察其第一基本形式的三种系数行为.① 平面 ∏ 的第一基本形式为d s 2 = d r •d r = (a d u + b d v )•(a d u + b d v ) = d u 2 + d v 2 .② 若在平面 ∏ 上采用极坐标系 (ρ, θ) ,即 {u = ρ cos θ v = ρ sin θ,则 r ρ = a cos θ + b sin θ ,r θ = (- a ρsin θ + b ρcos θ ) ;E (ρ, θ) = r ρ•r ρ = (a cos θ + b sin θ)•(a cos θ + b sin θ) = 1 ,F (ρ, θ) = r ρ•r θ = (a cos θ + b sin θ)•(- a ρsin θ + b ρcos θ) = 0 ,G (ρ, θ) = r θ•r θ = (- a ρsin θ + b ρcos θ)•(- a ρsin θ + b ρcos θ) = ρ2 ;此时,平面 ∏ 的第一基本形式(在极点无意义)为d s 2 = E (ρ, θ) d ρ2 + 2F (ρ, θ) d ρd θ + G (ρ, θ) d θ 2 = d ρ2 + ρ2 d θ 2 .③ 在平面 ∏ 上取任意一条无逗留点弧长 w 参数化曲线 C : ξ(w ) ,则其切线面r (w , t ) = ξ(w ) + t T (w ) 可表示一部分平面区域,其中 T 为 C 的单位切向.局部可得r w = T + t κ N ,r t = T ;E (w , t ) = r w •r w = (T + t κ N )•(T + t κ N ) = 1 + t 2κ 2 ,F (w , t ) = r w •r t = (T + t κ N )• T = 1 ,G (w , t ) = r t •r t = T • T = 1 ;此时,在平面 ∏ 上相应区域内,第一基本形式为d s 2 = E (w , t ) d w 2 + 2F (w , t ) d w d t + G (w , t ) d t 2= [1 + t 2κ 2(w )]d w 2 + 2d w d t + d t 2 .基于第一基本形式的不变性,需要注意,第一基本形式系数在容许参数变换下必须满足一定的变换规律.为了简便,可将第一基本形式 (3.2) 改写为形式矩阵,表示为(3.3) Ⅰ = d s 2 = (d u , d v ) ⎝⎛⎭⎫E F F G ⎝⎛⎭⎫d u d v ;相关各量分别表示为(3.4) d r = (d u , d v )⎝⎛⎭⎫r u r v ,(3.5) d r •d r = (d u , d v )⎝⎛⎭⎫r u r v ⎝⎛⎭⎫r u r v T ⎝⎛⎭⎫d u d v ,(3.6) ⎝⎛⎭⎫E F F G = ⎝⎛⎭⎫r u r v ⎝⎛⎭⎫r u r v T = ⎝⎛⎭⎫r u r v • (r u , r v ) ,其中各式之中的位置向量视为行向量,分块矩阵之间用“•”表示数量积.定义2 对正则曲面 S : r = r (u , v ) ,称二次型 (3.2) 或 (3.3) 的系数矩阵,即 (3.6) 式左端,为曲面 S 的第一基本形式系数矩阵;其行列式(3.7) E F F G = EG - F 2 = |r u |2|r v |2 - (r u •r v )2 = |r u ⨯r v |2 > 0 ,称为曲面 S 的第一基本形式系数行列式.性质 ① 正则曲面 S 的第一基本形式 (3.2) 是正定的二次型,即:d s 2 ≥ 0 ,且等号当且仅当 d u = d v = 0 时成立;② 正则曲面 S 的第一基本形式系数矩阵是正定的.这两条性质是等价的;它们的证明已经隐含在定义之中.下面具体考虑它们在容许参数变换下的行为.在容许参数变换 {u = u (u *, v *)v = v (u *, v *)下,记Jacobi 矩阵和Jacobi 行列式分别为(3.8) J = ⎝ ⎛⎭⎪⎫∂u ∂u * ∂v ∂u *∂u ∂v * ∂v ∂v * ,∂(u , v ) ∂(u *, v *) = |J | ; 记参数 (u *, v *) 下曲面 S 的第一基本形式为d s 2 = E *(u *, v *) d u *2 + 2F *(u *, v *) d u *d v * + G *(u *, v *) d v *2 .则由 (1.6) 式和 (1.7) 式分别代入 (3.6) 式和 (3.7) 式可得(3.9) ⎝⎛⎭⎫E * F *F * G * = ⎝⎛⎭⎫ r u * r v * ⎝⎛⎭⎫ r u * r v *T= J ⎝⎛⎭⎫ r u r v ⎝⎛⎭⎫ r u r vT J T = J ⎝⎛⎭⎫E F F G J T , (3.10) E *G * - F *2 = |J |2(EG - F 2) .这是两个具有理论意义的等式.第一个等式说明,第一基本形式系数矩阵服从所谓“张量”的变换规律,从而成为张量概念(将在后续几何或代数课程中出现)的直观背景之一.第二个等式将在下一段用来支持面积元素的概念,等价地写为(3.11) E*G* -F*2=||J||EG-F2.例2以平面弧长参数曲线为准线作柱面S,考察其第一基本形式;并证明其第一基本形式在某正则参数 (u, v) 下可以表示为 d s2= d u2+ d v2.解:平面弧长参数曲线设为C: a(s*) ,设S: r(s*, v) =a(s*) +v l, l= const. , |l|= 1 .则其第一基本形式为d s2=|d r|2=|a'(s*) d s* +l d v|2= d s*2+ 2[a'(s*)•l] d s*d v+ d v2.当直纹与准线C所在平面垂直时,a'(s*)•l≡ 0 ,则令 (u, v) = (s*, v) ,便可满足要求.当直纹与准线C所在平面不垂直时,可选取新的平面弧长参数曲线使直纹与新准线所在平面垂直(想想理由并自行给出解析论证),故可转化为上一种情形.三.交角与面积元素作为应用,下面考虑如何利用曲面的第一基本形式,以确定交角和面积等几何量.对于不同的曲线或曲面,它们在公共点的交角总是指它们在该点处的切线或切平面之间的夹角,而有向交角通常是指它们在该点处的单位切向或有向切平面之间的有向夹角.在自然标架下,有关曲面以及其上曲线的交角问题和面积问题,都可以利用自然基向量的数量积或向量积进行计算,从而转化为如何用第一基本形式表述或求解的问题.一般化的算法,体现在下面的较为具体的抽象计算过程中;而计算结果的意义,需要特别注意体会.1.曲面上的曲线的交角假设曲面S的第一基本形式以 (3.2) 式确定;曲面S上的两条曲线C i: {u=u i(t i)相交于点P0: r(u0, v0) ,(u0, v0) = (u i(t i0), v i(t i0)) ,i= 1, 2 .C i在点v=v i(t i)P0处的自然切向为r u(u0, v0) u i'(t i0) +r v(u0, v0) v i'(t i0) .简记a i= u i'(t i0) ,b i= v i'(t i0) ,E0=E(u0, v0) , F0=F(u0, v0) , G0=G(u0, v0) .则C i在点P0处的交角θ0的余弦确定为r u(u0, v0) u1'(t10) +r v(u0, v0) v1'(t10) |r u(u0, v0) u1'(t10) +r v(u0, v0) v1'(t10)|•r u(u0, v0) u2'(t20) +r v(u0, v0) v2'(t20) |r u(u0, v0) u2'(t20) +r v(u0, v0) v2'(t20)|=a1a2E0+ (a1b2+ b1a2)F0+ b1b2G0a12E0+ 2a1b1F0+ b12G0a22E0+ 2a2b2F0+ b22G0.利用微分形式的不变性,可知(d u i : d v i )|u i= u i(t i) , v i= v i(t i) ; t i=t i0=u i'(t i0) : v i'(t i0) =a i : b i,从而 cosθ0确定为E d u1d u2+F(d u1d v2+ d v1d u2) + G d v1d v2E d u12+ 2F d u1d v1+G d v12E d u22+ 2F d u2d v2+ G d v22|u i= u i(t i) , v i= v i(t i) ; t i=t i0.此式自然推广到一般切方向之上;即,设点(u, v) 处的两个切向微元在自然基 {r u, r v} 下分别为 d u:d v和δu:δv,则其间夹角余弦确定为(3.12) cosθ=E d uδu+F(d uδv+ d vδu) + G d vδvE d u2+ 2F d u d v+G d v2Eδu2+ 2Fδuδv+ Gδv2.该式表明:曲面上的曲线的交角,由曲面的第一基本形式以及曲线在交点处的切方向完全确定;而曲线的切方向只由参数区域上的原像即可确定.此处要注意,参数区域上的曲线原像之间的交角取决于区域本身,而与曲面上的交角没有必然的联系.可参考图3-13观察这个事实.将(3.12) 式用于坐标曲线族,将得到有价值的推论,列为如下定理.定理1对正则曲面而言,两族坐标曲线处处正交的充要条件为其第一基本形式系数矩阵处处是对角阵.证明(从自然切向的数量积出发,直接易证;下述过程是为了帮助理解(3.12) 式)在本节通用记号下,两族坐标曲线的切线分别为1:0 和0:1 ,代入 (3.12) 式即得坐标曲线夹角余弦cosθ=FEG;从而两族坐标曲线处处正交的充要条件为F≡ 0 ,即得结论.定义2对正则曲面S: r=r(u, v) ,若两族坐标曲线处处正交,则称参数(u, v) 为曲面S的一组正交参数,同时称这两族坐标曲线构成曲面S的一组正交参数网或正交网.定理1确定了曲面正交参数网的第一基本形式特征.在计算问题中,简短的第一基本形式显然会带来许多方便;因此,正交参数无疑是曲面上的一种较好的参数.关于曲面上较“好”参数(不一定正交)的讨论,将在 §5 以及第四章和第六章中多处出现.例3对正则曲面S: r=r(u, v) ,求两族坐标曲线的二等分角轨线C的微分方程.解:对于两族坐标曲线的自然切向r u和r v,二等分角向量场为r u |r u|±r v|r v|=r uE±r vG.故轨线C的切向微元r u d u+r v d v处处与该向量场平行,即沿C有d u:d v=1E:±1G,从而所求微分方程为E d u±G d v= 0 .例4已知正则曲面S: r=r(u, v) 的第一基本形式确定为 (3.2) 式.设微分方程α(u, v) d u2+ 2β(u, v) d u d v+γ(u, v) d v2= 0 在定义区域内过点 (u0, v0)有且仅有不相切的正则解曲线Γi: {u=u i(t i)v=v i(t i),i= 1, 2 ;两条曲面S上的曲线C i: {u=u i(t i)v=v i(t i)相交于点P0: r(u0, v0) .试证:两条曲线C i正交于点P0的充要条件为(Eγ- 2Fβ+Gα)|(u, v) = (u0, v0)= 0 .证明:记α0=α(u0, v0) , β0=β(u0, v0) ,γ0=γ(u0, v0) .记两条曲线C i在点 (u0, v0) 处的两个切向微元分别为a i : b i,则由正则性可知a i2+b i2≠ 0 ;由微分方程可知α0 a i2+ 2β0a i b i+γ0b i2= 0 .而由 (3.12) 式,C i之间正交条件写为a1a2E0+ (a1b2+ b1a2)F0+ b1b2G0= 0 .以下分两种情形讨论.情形①:α0=γ0= 0 ,则β0≠ 0 ;否则过点 (u0, v0) 的正则曲线都是解曲线,而与已知矛盾.此时,由微分方程知a i b i= 0 ,故只能有两组解{a1= 0, b1≠ 0 ,a2≠ 0 , b2= 0 ;或{b1= 0 , a1≠ 0 ,b2≠ 0 , a2= 0 ;对应正交条件等价化为F0= 0 ,即为所论条件.情形②:α0和γ0不同时为 0 ,不妨设α0≠ 0 ;则由微分方程可知,必有b i≠ 0 ;此时,不妨规范为b i= 1 ,则方程转化为α0 a i2+ 2β0a i+γ0= 0 .此时,由一元二次方程系数的性质,得知a1+a2=-2β0α0,a1a2=γ0α0,从而a1a2E0+ (a1b2+ b1a2)F0+ b1b2G0= a1a2E0+ (a1+ a2)F0+ G0=γ0α0E0+-2β0α0F0+ G0=1α0 (γ0E0-2β0F0+α0G0) .此式说明所论条件为充要条件.以上情形是完全分类,故结论得证.2.曲面的面积元素和区域面积现考虑曲面S的面积在已知第一基本形式之时的求解问题.在参数区域U内,任取矩形使其分别以点 (u, v), (u+d u, v),(u, v+d v), (u+d u, v+d v) 为顶点,则在曲面S上对应形成以点P1:(u, v), P2: (u+d u, v), P3: (u, v+d v),P4: (u+d u, v+d v) 为顶点的坐标曲线四边形.按照微积分理论,在略去更高阶无穷小量时,该曲边四边形的面积就等于直边三角形P1P2P3面积的二倍,从而就等于由向量P1P2和P1P3所张成的平行四边形的面积.而在略去更高阶无穷小量时,P1P2⨯P1P3= [r(u+d u, v) - r(u, v)]⨯[r(u, v+d v) -r(u, v)]≈ [r u(u, v)d u]⨯[r v(u, v)d v] =EG-F2 d u d v n(u, v) ,故曲面的面积元素可以表示为(3.13)dσ=|r u⨯r v| d u d v=EG-F2 d u d v,其中第二个等号是根据(3.7) 式.进而,曲面上任一有界区域r(U0) 的面积A(U0) 可以表示为(3.14) A(U0) =⎰⎰U0 dσ=⎰⎰U0|r u⨯r v| d u d v=⎰⎰U0EG-F2 d u d v.v)图3-14在参数变换下,根据 (3.8) 和 (3.10) 式以及二重积分的变量代换公式,易知面积元素对应相同,面积也对应相同;这与几何属性是相容的.以上结果的核心,列为如下定理.定理2 正则曲面的面积元素和区域面积由第一基本形式可完全确定.习 题⒈ 证明正则曲面的第一基本形式在容许参数变换下不变.⒉ 证明正则曲面的第一基本形式在 E 3 的正交标架变换下不变.⒊ 试求下列曲面的第一基本形式:① 单位球面 r (u , v ) = (2u u 2 + v 2 + 1 , 2v u 2 + v 2 + 1 , u 2 + v 2 - 1 u 2 + v 2 + 1) ; ② 悬链面 r (u , t ) = (t , cos u ch t , sin u ch t ) .⒋ 在螺面 r = (u cos v , u sin v , ln cos u + v ) 上,试证:每两条螺线(v 线)在任一 u 曲线上截取等长的曲线段.⒌ 球面上的斜驶线是指与经线交成定角的轨线,试在经纬参数化下确定其微分方程.⒍ 已知正则曲面 S : r (u , v ) 之上有两族正则曲线 ϕ( u , v ) = a 和 ψ( u , v ) = b ,其中a 和b与 (u , v ) 无关.试证:它们互相正交的充要条件为E ϕv ψv -F (ϕu ψv + ϕv ψu ) +G ϕu ψu = 0 .⒎ 已知曲面的第一基本形式为 d s 2 = d u 2 + (u 2 + 4) d v 2 .试求:① 其上两条曲线 C 1: u + v = 0 与 C 2: u - v = 0 的交角;② 其上三条曲线 C 1: u = v 2 , C 2: u = - v 2 与 C 3: v = 1 所围成的曲边三角形的边长和各个内角;③ 其上三条曲线 C 1: u = v , C 2: u = - v 与 C 3: v = 1 所围成的曲边三角形的面积.。

曲面方程总结一、曲面方程的基本概念曲面是三维空间中的一个二维曲线在第三个维度上的延伸,可以被表示为一种方程形式。
曲面方程描述了曲面上所有点的性质和关系,是数学中重要的工具之一。
二、曲面方程的分类根据曲面的性质和方程的形式,我们可以将曲面方程分为以下几类:2.1 隐式曲面方程隐式曲面方程是最基本的曲面方程形式,可以用一个等式来表示。
例如,一个球体的隐式曲面方程可以表示为:x^2 + y^2 + z^2 - r^2 = 0其中,x、y、z是三维空间中的坐标变量,r是球体的半径。
2.2 参数曲面方程参数曲面方程使用参数表示曲线上的点的位置。
例如,一个圆柱体的参数曲面方程可以表示为:x = r * cos(theta)y = r * sin(theta)z = z其中,theta是参数,r是圆柱体的半径,z是高度。
2.3 二次曲面方程二次曲面方程是指由二次多项式定义的曲面方程。
常见的二次曲面包括球面、椭球面和双曲面等。
例如,一个椭球面的二次曲面方程可以表示为:Ax^2 + By^2 + Cz^2 + Dxy + Exz + Fyz + Gx + Hy + Iz + J = 0其中,A、B、C、D、E、F、G、H、I、J是参数。
三、曲面方程的应用曲面方程在数学和科学中有着广泛的应用,以下是一些常见的应用领域:3.1 几何学曲面方程在几何学中起着重要的作用,可以描述各种形状的曲面,如球体、圆柱体、圆锥体等。
通过分析曲面方程,可以研究曲面的性质,如曲率、法向量等。
3.2 物理学曲面方程在物理学中有着广泛的应用,可以描述电磁场、流体流动、声波传播等现象。
通过求解曲面方程,可以得到物理系统的解析解,进而分析系统的行为和性质。
3.3 计算机图形学曲面方程在计算机图形学中被广泛应用于建模和渲染。
通过定义曲面方程,可以描述并生成各种复杂的三维物体,如人物角色、场景等。
曲面方程的求解和优化也是计算机图形学中的重要研究内容之一。
第二章 曲面论第十三节 曲面上的高斯映射 高斯曲率的几何意义曲面的第三基本形式Gauss 映射曲面的Gauss 映射ϕ(或称为球面表示) 是曲面∑上的点到单位球面S 上点的映射 ,具体叙述如下。
定义 在曲面:(,)r r u v ∑=,的的任一点(,)P u v 处, 作出单位法向量(,)n u v ,并平行移动。
(,)n u v,使它的始点与原点O 重合,那么, n的终点就落到以O 为球心的单位球面S 上, 从而得到一点P ' , 我们称从∑到S 的这一映射:P P ϕ'→为曲面的高斯映射。
ϕ是把整个曲面映射到单位球面上的,曲面∑在球面上的象是S 上的一个点集σ。
若已知曲面∑的方程为(,)r r u v = ,那么, ∑在高斯映射下的球面象σ的方程为(,)n u v,即||||u vuv r r r r n r r ⨯⨯==⨯。
上式即为高斯映射的向量表示式。
例1 、求球面(sin cos ,sin sin ,cos )r a a a θϕθϕθ=的高斯映射下的球面象。
解(,,)(s in c o s ,s in s in ,c o s )x y zn a a aθϕθϕθ== 。
例2、 求正螺面(cos ,sin ,)r u v u v av =的高斯映射下的球面象。
解 (co s ,sin ,0)u r v v =, (sin ,cos ,)v r u v u v a =-, (sin ,cos ,)u v r r a v a v u ⨯=-,1(sin ,cos ,)||||u vu v r r n a v a v u r r ⨯==-⨯ 。
曲面与球面象的关系曲面∑的高斯映射不一定是∑上的点到单位球面S 上的点的一一映射。
例如 设∑是一柱面,其方程是0()r a s vb =+,()s r a s '=,0v r b = ,∑的球面象的方程为0()||||||()||s v s v r r a s b n r r a s b '⨯⨯==⨯'⨯,这是单位球面S 上一条曲线。
曲面的三个基本形式的系数矩阵之间关系的证明邢家省,王拥军(北京航空航天大学数学与系统科学学院,数学、信息与行为教育部重点实验室,北京100191)摘 要: 给出3R 中曲面的3 个基本形式的系数矩阵之间关系的一个直接 证明, 并由此得到曲面的3 个基本形式之间的关系表示及其一些 应用.关键词: 第三基本形式; 法曲率的最值; 测地挠率 中图分类号: O186. 11 文献标识码: A曲面的第三基本形式可以用第一和第二基本形式来表示是一个重要结论[19]-,对其证明引起了人们的极大兴趣.我们在已有方法的基础上,经过综合分析和领会,发现了一套自然合理的推导转换的过程,给出了直接简单自然的证明过程.1曲面的第三基本形式用第一和第二基本形式表示的证明设曲面:(,)r r u v ∑= 是2C 类的正则曲面.曲面∑上一点(,)P u v 处的单位法向量为n.我们采用文献[1-3]中的记号.收稿日期:基金项目:国家自然科学基金资助项目(11171013),北京航空航天大学教改项目基金资助作者简介:邢家省(1964--)男,河南泌阳人,博士,副教授,从事数学教学和科研工作.Email:xjsh@ .令,,u u u v v v e n n f n n g n n =⋅=⋅=⋅ ,,,e f g 称为曲面∑的第三类基本量.用III 表示曲面∑的第三基本形式[13]-: 22()2()e du fdudv g dv III=++ .曲面的第三基本形式可以用第一和第二基本形式来表示,在文献[1-3]中是在曲面上选取了曲率线网作为坐标曲线网后,给予证明的.我们在曲面上选取正交曲线族为坐标曲线网下,给出证明.选取曲面∑上的正交曲线族为坐标曲线网.设曲面:(,)r r u v ∑= 上的坐标曲线网是正交网. 则有0u v F r r =⋅=,曲面的第一基本形式22()()E du G dv I =+, 曲面的第二基本形式22()2()L du Mdudv N dv II=++,高斯曲率2LN M K EG -=,平均曲率2LG NE H EG +=.因为1,n n ⋅=所以0,0u v n n n n ⋅=⋅= ,从而,,u u v n r r共面,,,v u v n r r共面,设12u u v n a r a r =+,则有12,L M a a E G =-=-; 设12v u v n b r b r =+,则有12,M N b b E G=-=- . 于是2212u u u u v v e n n a r r a r r =⋅=⋅+⋅22222L G M E L G LNE LNE M EHL KEEG EG++-+===-,1122u v u u v v f n n a b r r a b r r =⋅=⋅+⋅ 2LGM NEMHM EG+==,2212v v u u v vg n n b r r b r r =⋅=⋅+⋅22222M G N E LGN N E LNG M G HN KGEG EG++-+===-,代入第三基本形式,可得到2H K III=II -I .2 曲面的三个基本形式的系数矩阵之间关系设曲面:(,)r r u v ∑= 是2C类的正则曲面.曲面∑上一点(,)P u v 处的单位法向量为n.定理1[4,5]设E F A F G ⎛⎫= ⎪⎝⎭,L M B M N ⎛⎫= ⎪⎝⎭, ef C fg ⎛⎫= ⎪⎝⎭分别是曲面在(,)P u v 点处的第一、第二、第三基本形式的系数矩阵. 则有 1C BA B -= , (1)证明 因为1,n n ⋅=所以0,0u v n n n n ⋅=⋅= ,从而,,u u v n r r 共面,,,v u v n r r 共面;存在1212,;,a a b b ,使得12u u v n a r a r =+,12v u v n b r b r =+;写成矩阵形式为 1212u u v v n r a a n r b b ⎛⎫⎛⎫⎛⎫= ⎪ ⎪⎪⎝⎭⎝⎭⎝⎭, 记1212a a D b b ⎛⎫=⎪⎝⎭,则有u u v v n r D n r ⎛⎫⎛⎫= ⎪ ⎪⎝⎭⎝⎭, 两边左乘(),T u u v v r r r r ⎛⎫= ⎪⎝⎭,得到()(),,u u u v u v v v n r r r D r r n r ⎛⎫⎛⎫= ⎪ ⎪⎝⎭⎝⎭, 即u u u v u u u v v u v v v u v v n r n r r r r r D n r n r r r r r ⋅⋅⋅⋅⎛⎫⎛⎫= ⎪ ⎪⋅⋅⋅⋅⎝⎭⎝⎭, 由基本量的计算公式,得L M E F D M N F G --⎛⎫⎛⎫= ⎪ ⎪--⎝⎭⎝⎭,于是成立B DA -=,从而有1D BA -=-,所以得出1u u v v n r BA n r -⎛⎫⎛⎫=- ⎪ ⎪⎝⎭⎝⎭,u u u v v u v v n n n n e f C nn n n f g ⋅⋅⎛⎫⎛⎫== ⎪ ⎪⋅⋅⎝⎭⎝⎭()(),,u u T T u v u v v v n r n n D r r D DAD n r ⎛⎫⎛⎫=== ⎪ ⎪⎝⎭⎝⎭111()()BA A A B BA B ---=--=,故成立1C BA B -= .3 法曲率最值的特征值及特征向量性质考虑法曲率n k 的最值和最值方向的特征值、特征向量性质.令E F A F G ⎛⎫= ⎪⎝⎭,L M B MN ⎛⎫= ⎪⎝⎭,x X y ⎛⎫= ⎪⎝⎭;则有 n k II=I2222()2()()2()L du Mdudv N dv E du Fdudv G dv ++=++(,)(,)du du dv B dv du du dv A dv ⎛⎫⎪⎝⎭=⎛⎫⎪⎝⎭. 因此,最大值、最小值问题转化为讨论()T f X X BX =在条件1T X A X =下的最大值、最小值问题。
因为2{:1}TS X R X AX =∈=是有界闭集,()T f X X BX =在S 上连续,所以()f X 在S 上存在最大值M k 和最小值m k .存在,M m X X S ∈,使得(),()M M m m f X k f X k ==.记||||A X =对任意的实数t 及2h R ∈都有,m m m A X th k f X th ⎛⎫+≤ ⎪ ⎪+⎝⎭,M M M A X th f k X th ⎛⎫+≤ ⎪ ⎪+⎝⎭,经过展开计算,可得T T M M M X Bh k X Ah =,(任意2h R ∈),从而,T TM M M M M M X B k X A BX k AX ==, 1M M M A BX k X -=; 同理可证m m m BX k AX = ,1m m m A BX k X -= 方程组()0M M B k A X -=,()0m m B k A X -=, 有非零解当且仅当||0M B k A -=,||0m B k A -=.由于 ||||L M E F L E M F B A M N F G M FN Gλλλλλλ--⎛⎫⎛⎫-=-= ⎪ ⎪--⎝⎭⎝⎭2()()()L E N G M F λλλ=----222()(2)()EG F LG MF NE LN M λλ=---++-,所以,M m k k 满足222()(2)()0EG F LG MF NE LN M λλ---++-=,即,M m k k 是该方程根.由韦达定理,便得22M m LN M k k EG F-=-, 22M m LG MF NEk k EG F -++=- . 显然||0B A λ-=等价于1||0E A B λ--=, 于是,M m k k 是特征方程1||0E A B λ--=的两个根,所以 有1det det()det M m B k k A B A-==,1()M m k k tr A B -+= .于是det det M m B K k k A==,111()()22M mH k k tr A B -=+=, 容易验证这与前面的一致,便于记忆使用和推导使用[110]-.当M m k k ≠时,有T T M m M M m X BX k X AX =,TTM m m M m X BX k X AX =, 由此可得0T M m X AX =,0T M m X BX =, 即两方向,M m X X 垂直、共扼. 设,M m du u X X dv v δδ⎛⎫⎛⎫==⎪ ⎪⎝⎭⎝⎭, 则有(,)0E F u du dv F G v δδ⎛⎫⎛⎫=⎪⎪⎝⎭⎝⎭,(,)0LM u du dv MN v δδ⎛⎫⎛⎫=⎪⎪⎝⎭⎝⎭. 于是0dr r δ⋅=,0dn r δ⋅= ,即,dr r δ 是曲面上垂直、共扼的切方向.上面的推导方法,提供了法曲率最值和最值方向的同时求法,并且法曲率的两最值方向是正交和共轭的.4、曲面的第三基本形式的表示的矩阵证法由上面的引入方法,自然导致了考虑特征多项式[6,10]12||2E A B H K λλλ--=-+零点的问题.对二阶方阵11122122a a A a a ⎛⎫=⎪⎝⎭,其征多项式为 2112211221221||()()E A a a a a a a λλλ-=-++-,直接验证,可知A 满足特征矩阵方程2112211221221()()0X a a X a a a a E -++-=,即2()(det )0X trA X A E -+=,其中X 为2阶方阵,E 为2阶单位矩阵.从而可知1A B -满足矩阵方程211(())(det())0X tr A B X A B E ---+=,即220X HX KE -+=,代入得到11120A BA B HA B KE ----+=, 从而有120BA B HB KA --+=, 即得到20C HB KA -+=,写出此矩阵方程的关于,du dv 的二次型,就得到20H K III -II +I = ,(2)5 曲面的第三基本形式的表示式的一些应用推论1[2,5]曲面:(,)r r u v ∑=上一点P 沿一方向():d du dv =上的法曲率n k 为和测地挠率g τ之间满足:2220g n n k Hk K τ+-+= , (3)证明 因为曲面在同一点同一方向的法曲率和测地挠率分别为:2||||n dn dr k dr II -⋅==I,2211()()()()||||g dn dr n dn dr n dn dr n ds ds ds dr τ=⨯⋅=⨯⋅=⨯⋅, 由()//dn dr n ⨯ 及||||1n =,得:222241[||||()]||||g n k dn dr dn dr dr τ+=⨯+⋅ 222421||||[||||||||]||||||||dn dn dr dr dr III ===I,因为I 正定, 由( 2) 式得20H K III II-+=I I,此即2220gn n k Hk K τ+-+=.推论2 [2,5]极小曲面曲面:(,)r r u v ∑= 上一点P 沿一方向():d du dv =上的法曲率n k 为和测地挠率g τ与曲面的Gauss 曲率K 满足: 220gn k K τ++=.推论3[1,2,5] 若曲线为过曲面上一双曲点P 的渐近曲线,且 曲率0k ≠,则曲线在P 点的挠率τ和曲面在P 点的Gauss 曲率K 满足:20K τ+= , ( 4)证明 由于沿渐近曲线0n k kn βII==⋅=I,利用条件0k ≠,所以曲线的主法向量垂直于曲面的法向量, 于是曲线的副法向量平行于曲面的法向量, 即()()s n s γ=±(s 为曲线的自然参数).由曲线论的Frenet 公式,得 ()()d s dn s ds dsγτβ-==±, 两边取模的平方,得: 222||||()dn ds τIII==I, 又沿渐近曲线0II = ,由( 2) 式得0K III+=I, 所以有20K τ+= .参考文献:[1]梅向明,黄敬之.微分几何[M].第4版.北京:高等教育出版社出版,2008,87-105.[2]陈维桓.微分几何[M]..北京:北京大学出版社,2006,158-176,229-241. [3] 彭家贵,陈卿.微分几何[M].北京:高等教育出版社,2002,47-59. [4]马 力. 简明微分几何[M].北京:清华大学出版社, 2004,27-38. [5]傅朝金,何汉林. 曲面的三个基本形式的系数矩阵之间关系的证明及其应用[J]. 海军工程大学学报, 2002 ,24(3):5-7.[6]陈维桓. 曲面的三个基本形式之间的关系是Hamilton-Cayley 定理的推论[ J] . 数学的实践与认识, 1990( 3) : 79-81.[7]宋占奎.曲面的第三基本形式研讨[J].吉林化工学院学报,2006,23(4):79-82 .[8]杨殿训.高斯映射的基本性质[J].烟台师范学院学报(自然科学版).1989,5(2):76-81.[9] 华罗庚著,王元校.高等数学引论(第二册)[M].北京: 科学出版社,2009. 284-311[10] 邢家省.法曲率最值的直接求法[J].吉首大学学报(自然科学版).2012,33(4):11-15.A proof of the relation among the system matrixes of three fundamental forms of a surfaceXing Jiasheng Wang Yongjun(Department of Mathematics, LMIB of the Ministry ofEducation, Beihang University ,Beijing 100191,China)Abstract:In this paper, we give a direct proof of the relation amongthe system matrixes of three fundamental forms of a surface in 3R.From this results, w e obtain a relation among three fundamental forms of a surface and its some application .Keywords: third fundamental form;normal Curvature of the most value;geodesic torsion。