CATIA运动仿真DMU空间分析
- 格式:pdf
- 大小:1.30 MB
- 文档页数:30
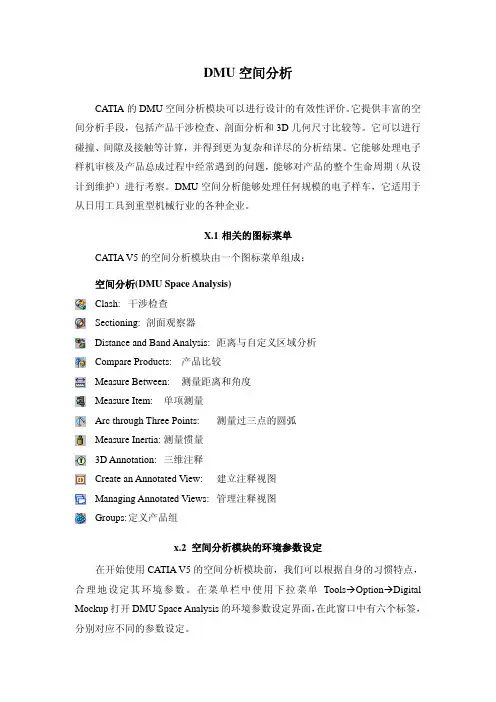
CATIA运动仿真DMU空间分析CATIA的DMU空间分析模块可以进行设计的有效性评价。
它提供丰富的空间分析手段,包括产品干涉检查、剖面分析和3D几何尺寸比较等。
它可以进行碰撞、间隙及接触等计算,并得到更为复杂和详尽的分析结果。
它能够处理电子样机审核及产品总成过程中经常遇到的问题,能够对产品的整个生命周期(从设计到维护)进行考察。
DMU空间分析能够处理任何规模的电子样车,它适用于从日用工具到重型机械行业的各种企业。
X.1 相关的图标菜单CATIA V5的空间分析模块由一个图标菜单组成:空间分析(DMU Space Analysis)Clash: 干涉检查Sectioning: 剖面观察器Distance and Band Analysis: 距离与自定义区域分析Compare Products: 产品比较Measure Between: 测量距离和角度Measure Item: 单项测量Arc through Three Points: 测量过三点的圆弧Measure Inertia: 测量惯量3D Annotation: 三维注释Create an Annotated View: 建立注释视图Managing Annotated Views: 管理注释视图Groups: 定义产品组x.2 空间分析模块的环境参数设定在开始使用CATIA V5的空间分析模块前,我们可以根据自身的习惯特点,合理地设定其环境参数。
在菜单栏中使用下拉菜单Tools→Option→Digital Mockup打开DMU Space Analysis的环境参数设定界面,在此窗口中有六个标签,分别对应不同的参数设定。
x.2.1 干涉检查设置(DMU Clash)该设置针对Clash命令,允许设置以下内容:Retrieve Information:得到干涉的结果From previous computation:从前一个计算得到分析结果From PDM(UNIX only with ENOVIA VPM):从PDM中得到分析结果(在UNIX系统下是ENOVIA VPM)None:(缺省)无比较Results Window /Automatically open:当进行干涉检查时自动打开结果显示窗口Display in Results box:设置缺省的显示条目list by conflict:冲突列表list by product:产品列表First line automaticallyselected:(缺省)自动选择冲突列表或产品列表的第一行Type of Computation:设置冲突的缺省类型和缺省的安全距离During Initial Computation:计算并显示所有冲突的深度和最小距离x.2.2 干涉检查细节设置(DMU Clash – Detailed Computation)该设置针对Clash命令,允许设置以下内容:Level of Detail:设置细节的级别Element:(缺省)让用户全面地工作于产品级别,直到查明有关的元素。
CATIA_DMU运动分析CATIA_DMU(数字机械设计合作环境)是达索系统公司开发的一款计算机辅助设计软件,它提供了一系列功能强大的工具,用于进行机械运动分析。
在设计过程中,通过对机械运动进行模拟和分析,可以评估和优化设计方案,提高产品的性能和可靠性。
CATIA_DMU运动分析提供了几个关键功能,包括逆向动力学分析、正向动力学分析、动力学优化、虚拟样机等。
这些功能使得设计师能够模拟和分析机械在运动过程中的各种力和力矩,以及关节、连杆等部件的运动轨迹和速度。
以下是对CATIA_DMU运动分析的详细介绍。
首先,逆向动力学分析是CATIA_DMU运动分析的核心功能之一、它可以通过给定的位移、速度和加速度,计算出机械系统中各个部件所受的力和力矩。
对于复杂的机械系统,逆向动力学分析可以帮助设计师确定各个部件的负载情况,以及评估系统的性能和可靠性。
通过合理选择部件的材料和尺寸,可以降低系统的应力和降低故障的风险。
其次,正向动力学分析是CATIA_DMU运动分析的另一个重要功能。
它可以根据给定的力和力矩,计算出机械系统中各个部件的运动轨迹和速度。
正向动力学分析可以帮助设计师预测机械系统在运行过程中的性能,例如加速度、速度和停止时间等。
通过优化初始条件和设计参数,可以改进系统的运动性能,并取得更好的控制效果。
此外,动力学优化是CATIA_DMU运动分析的又一个重要功能。
它可以根据设计要求和约束条件,通过调整设计参数,优化机械系统的动力学性能。
动力学优化可以帮助设计师找到最优的设计方案,以实现最佳的性能和效益。
通过不断迭代和优化,可以改善机械系统的稳定性、响应时间和能耗水平等。
最后,虚拟样机是CATIA_DMU运动分析的一个特殊功能。
它可以通过模拟和分析机械系统的运动过程,实现在虚拟环境中对系统进行检查和验证。
虚拟样机可以帮助设计师发现和解决潜在的问题,避免在实际制造和测试过程中出现错误和故障。
通过与其他模块的集成,例如CAD、CAE和CAM,虚拟样机可以提供全面的设计和仿真环境。
C A T I A运动仿真D M U空间分析CATIA运动仿真DMU空间分析CATIA的DMU空间分析模块可以进行设计的有效性评价。
它提供丰富的空间分析手段,包括产品干涉检查、剖面分析和3D几何尺寸比较等。
它可以进行碰撞、间隙及接触等计算,并得到更为复杂和详尽的分析结果。
它能够处理电子样机审核及产品总成过程中经常遇到的问题,能够对产品的整个生命周期(从设计到维护)进行考察。
DMU空间分析能够处理任何规模的电子样车,它适用于从日用工具到重型机械行业的各种企业。
X.1 相关的图标菜单CATIA V5的空间分析模块由一个图标菜单组成:空间分析(DMU Space Analysis)Clash: 干涉检查Sectioning: 剖面观察器Distance and Band Analysis: 距离与自定义区域分析Compare Products: 产品比较Measure Between: 测量距离和角度Measure Item: 单项测量Arc through Three Points: 测量过三点的圆弧Measure Inertia: 测量惯量3D Annotation: 三维注释Create an Annotated View: 建立注释视图Managing Annotated Views: 管理注释视图Groups: 定义产品组x.2 空间分析模块的环境参数设定在开始使用CATIA V5的空间分析模块前,我们可以根据自身的习惯特点,合理地设定其环境参数。
在菜单栏中使用下拉菜单Tools→Option→Digital Mockup打开DMU Space Analysis的环境参数设定界面,在此窗口中有六个标签,分别对应不同的参数设定。
x.2.1 干涉检查设置(DMU Clash)该设置针对Clash命令,允许设置以下内容:Retrieve Information:得到干涉的结果From previous computation:从前一个计算得到分析结果From PDM(UNIX only with ENOVIAVPM):从PDM中得到分析结果(在UNIX系统下是ENOVIA VPM)None:(缺省)无比较Results Window /Automatically open:当进行干涉检查时自动打开结果显示窗口Display in Results box:设置缺省的显示条目list by conflict:冲突列表list by product:产品列表First line automatically selected:(缺省)自动选择冲突列表或产品列表的第一行Type of Computation:设置冲突的缺省类型和缺省的安全距离During Initial Computation:计算并显示所有冲突的深度和最小距离x.2.2 干涉检查细节设置(DMU Clash – Detailed Computation)该设置针对Clash命令,允许设置以下内容:Level of Detail:设置细节的级别Element:(缺省)让用户全面地工作于产品级别,直到查明有关的元素。
CATIA运动仿真DMU空间分析
一、CATIA关于动态仿真的介绍
CATIA动态仿真是一款非常先进和强大的模拟软件,它提供了强大的
模拟技术,它使用创建复杂机械组件和机械系统的过程变得简单,更快捷,更安全。
它提供强大的模拟技术,可以模拟机械系统的运动,尤其是双向
模拟,它可以将机械系统的运动还原到任何位置,从而更好地模拟机械系
统的运动,便于确定机械系统的建模参数,如型号,装配参数等,对于机
械模型的仿真来说,这是一个非常重要的工具,可以处理多种复杂的机械
设计任务,更好地模拟机械系统的行为,进行有效的实验验证。
二、CATIA动态仿真的功能
1、CATIA动态仿真功能:支持动画功能,可以在动画模式下模拟机
械系统的运动,准确演示机械系统的设计方案,帮助机械设计者完成机械
系统的设计;
2、双向模拟:可以模拟机械系统的双向运动,可以从模型驱动,也
可以从轨迹驱动,在复杂的机械系统中,可以模拟机械系统的双向运动,
实现机械系统动态特性的曲线和表达式,结合运动模拟可以实现选择性的
光滑动画效果;
3、空间分析:可以支持复杂机械系统的空间分析。
CATIADMU运动机构仿真教程CATIA是一款广泛应用于机械设计和制造领域的三维建模软件,而DMU(Digital Mock-Up)则是CATIA的一项重要功能,它能够在虚拟环境中对机械产品进行完整模拟和测量。
本篇文章将重点介绍如何使用CATIA DMU进行运动机构仿真。
首先,我们需要打开CATIA软件,并新建一个机械装配模型。
在装配模型中,我们可以选择和放置各种零件,然后使用约束关系将它们链接在一起,从而形成一个机械运动机构。
在确定机构设计之后,我们需要进行运动仿真来验证其运动性能和机构强度。
在装配模型中,选择"DMU Kinematics"工具栏中的"Module Creation"来创建一个新的运动模块。
然后,在"Product1"下创建一个新的机构,命名为"Motion"。
在"Motion"中选择"Insert",然后选择"Mechanisms"来添加运动机构零件。
接下来,我们需要选择合适的约束关系来定义机构的运动自由度。
在CATIA中,可以使用各种约束关系来模拟机构零件之间的运动关系,比如:旋转关节、滑动关节、齿轮齿条传动等。
例如,我们可以选择两个零件之间的旋转关节来定义它们之间的旋转运动。
在"Motion"中选择"Insert",然后选择"Rigid"关节来添加一个旋转关节。
然后选择两个需要链接的零件,按住Ctrl键并点击它们。
CATIA将自动在两个零件之间创建一个旋转关节。
设置旋转关节的旋转轴和角度范围后,即可完成约束的定义。
定义完所有的约束关系后,我们可以通过点击"Close"来关闭约束定义窗口。
然后选择"Motion Analysis"工具栏中的"Define Simulation"来定义仿真参数。
DMU空间分析CATIA的DMU空间分析模块可以进行设计的有效性评价。
它提供丰富的空间分析手段,包括产品干涉检查、剖面分析和3D几何尺寸比较等。
它可以进行碰撞、间隙及接触等计算,并得到更为复杂和详尽的分析结果。
它能够处理电子样机审核及产品总成过程中经常遇到的问题,能够对产品的整个生命周期(从设计到维护)进行考察。
DMU空间分析能够处理任何规模的电子样车,它适用于从日用工具到重型机械行业的各种企业。
X.1 相关的图标菜单CATIA V5的空间分析模块由一个图标菜单组成:空间分析(DMU Space Analysis)Clash: 干涉检查Sectioning: 剖面观察器Distance and Band Analysis: 距离与自定义区域分析Compare Products: 产品比较Measure Between: 测量距离和角度Measure Item: 单项测量Arc through Three Points: 测量过三点的圆弧Measure Inertia: 测量惯量3D Annotation: 三维注释Create an Annotated View: 建立注释视图Managing Annotated Views: 管理注释视图Groups: 定义产品组x.2 空间分析模块的环境参数设定在开始使用CATIA V5的空间分析模块前,我们可以根据自身的习惯特点,合理地设定其环境参数。
在菜单栏中使用下拉菜单ToolsÆOptionÆDigital Mockup打开DMU Space Analysis的环境参数设定界面,在此窗口中有六个标签,分别对应不同的参数设定。
x.2.1 干涉检查设置(DMU Clash)该设置针对Clash命令,允许设置以下内容:Retrieve Information:得到干涉的结果From previous computation:从前一个计算得到分析结果From PDM(UNIX only with ENOVIA VPM):从PDM中得到分析结果(在UNIX系统下是ENOVIA VPM)None:(缺省)无比较Results Window /Automatically open:当进行干涉检查时自动打开结果显示窗口Display in Results box:设置缺省的显示条目list by conflict:冲突列表list by product:产品列表First line automatically selected:(缺省)自动选择冲突列表或产品列表的第一行Type of Computation:设置冲突的缺省类型和缺省的安全距离During Initial Computation:计算并显示所有冲突的深度和最小距离x.2.2 干涉检查细节设置(DMU Clash – Detailed Computation)该设置针对Clash命令,允许设置以下内容:Level of Detail:设置细节的级别Element:(缺省)让用户全面地工作于产品级别,直到查明有关的元素。
CATIADMU机构运动分析CATIA DMU(Digital Mock-Up)机构运动分析是一种在CATIA软件平台上进行的数字化样机的运动分析方法。
通过对机构的运动进行模拟和分析,可以评估设计的有效性、发现潜在问题,并优化设计方案。
1.建立机构模型:首先需要在CATIA软件中建立机构的几何模型,包括各个部件的几何形状、尺寸和位置关系等信息。
可以通过绘制二维草图、拖拉特定形状的线条等方式进行模型的绘制。
2.定义机构间的运动关系:在建立机构模型后,需要定义各个部件之间的运动关系。
可以通过定义关节、连杆、驱动器等方式,将不同部件之间的运动关系设定为特定的线性或非线性关系。
3.设置运动分析条件:在进行机构运动分析前,需要设置一些分析条件,比如加载条件、边界条件等。
可以根据实际情况设定机构的振动频率、加载力的大小和方向等。
4.进行机构运动分析:在设置好运动分析条件后,即可开始进行机构运动分析。
CATIA软件会根据设定的运动关系和加载条件,模拟机构的运动情况,并输出相应的运动结果。
可以对机构的运动速度、加速度、位移等参数进行分析,评估机构设计的合理性和稳定性。
5.优化机构设计:通过对机构的运动分析结果进行评估,可以发现机构设计中存在的问题,比如各个部件之间的干涉、运动范围受限等。
可以根据分析结果对机构进行优化设计,改进设计方案,提高机构的性能和可靠性。
CATIADMU机构运动分析的应用领域广泛,主要用于机械工程、航空航天工程、汽车工程等领域。
通过该方法可以在设计阶段对机构进行全面而准确的分析,减少实际制造中的试错成本和时间。
同时,还可以对机构的运动性能和可靠性进行预测和评估,为设计师提供决策支持。
在实际应用中,CATIADMU机构运动分析还可与其他分析方法相结合,比如有限元分析、流体力学分析等,以实现多学科的综合分析。
这样可以对机构的运动、结构、热力等方面进行全面分析,帮助设计师制定更合理、更优化的设计方案。
(整理)CATIA运动仿真DMU空间分析.CATIA运动仿真DMU空间分析CATIA的DMU空间分析模块可以进⾏设计的有效性评价。
它提供丰富的空间分析⼿段,包括产品⼲涉检查、剖⾯分析和3D⼏何尺⼨⽐较等。
它可以进⾏碰撞、间隙及接触等计算,并得到更为复杂和详尽的分析结果。
它能够处理电⼦样机审核及产品总成过程中经常遇到的问题,能够对产品的整个⽣命周期(从设计到维护)进⾏考察。
DMU空间分析能够处理任何规模的电⼦样车,它适⽤于从⽇⽤⼯具到重型机械⾏业的各种企业。
X.1 相关的图标菜单CATIA V5的空间分析模块由⼀个图标菜单组成:空间分析(DMU Space Analysis)Clash: ⼲涉检查Sectioning: 剖⾯观察器Distance and Band Analysis: 距离与⾃定义区域分析Compare Products: 产品⽐较Measure Between: 测量距离和⾓度Measure Item: 单项测量Arc through Three Points: 测量过三点的圆弧Measure Inertia: 测量惯量3D Annotation: 三维注释Create an Annotated View: 建⽴注释视图Managing Annotated Views: 管理注释视图Groups: 定义产品组x.2 空间分析模块的环境参数设定在开始使⽤CATIA V5的空间分析模块前,我们可以根据⾃⾝的习惯特点,合理地设定其环境参数。
在菜单栏中使⽤下拉菜单Tools→Option→Digital Mockup打开DMU Space Analysis的环境参数设定界⾯,在此窗⼝中有六个标签,分别对应不同的参数设定。
x.2.1 ⼲涉检查设置(DMU Clash)该设置针对Clash命令,允许设置以下内容:Retrieve Information:得到⼲涉的结果From previous computation:从前⼀个计算得到分析结果From PDM(UNIX only with ENOVIA VPM):从PDM中得到分析结果(在UNIX系统下是ENOVIA VPM)None:(缺省)⽆⽐较Results Window /Automatically open:当进⾏⼲涉检查时⾃动打开结果显⽰窗⼝Display in Results box:设置缺省的显⽰条⽬list by conflict:冲突列表list by product:产品列表First line automatically selected:(缺省)⾃动选择冲突列表或产品列表的第⼀⾏Type of Computation:设置冲突的缺省类型和缺省的安全距离During Initial Computation:计算并显⽰所有冲突的深度和最⼩距离x.2.2 ⼲涉检查细节设置(DMU Clash – Detailed Computation)该设置针对Clash命令,允许设置以下内容:Level of Detail:设置细节的级别Element:(缺省)让⽤户全⾯地⼯作于产品级别,直到查明有关的元素。
CATIA运动仿真DMU空间分析CATIA的DMU空间分析模块可以进行设计的有效性评价。
它提供丰富的空间分析手段,包括产品干涉检查、剖面分析和3D几何尺寸比较等。
它可以进行碰撞、间隙及接触等计算,并得到更为复杂和详尽的分析结果。
它能够处理电子样机审核及产品总成过程中经常遇到的问题,能够对产品的整个生命周期(从设计到维护)进行考察。
DMU空间分析能够处理任何规模的电子样车,它适用于从日用工具到重型机械行业的各种企业。
X.1 相关的图标菜单CATIA V5的空间分析模块由一个图标菜单组成:空间分析(DMU Space Analysis)Clash: 干涉检查Sectioning: 剖面观察器Distance and Band Analysis: 距离与自定义区域分析Compare Products: 产品比较Measure Between: 测量距离和角度Measure Item: 单项测量Arc through Three Points: 测量过三点的圆弧Measure Inertia: 测量惯量3D Annotation: 三维注释Create an Annotated View: 建立注释视图Managing Annotated Views: 管理注释视图Groups: 定义产品组x.2 空间分析模块的环境参数设定在开始使用CATIA V5的空间分析模块前,我们可以根据自身的习惯特点,合理地设定其环境参数。
在菜单栏中使用下拉菜单Tools→Option→Digital Mockup打开DMU Space Analysis的环境参数设定界面,在此窗口中有六个标签,分别对应不同的参数设定。
x.2.1 干涉检查设置(DMU Clash)该设置针对Clash命令,允许设置以下内容:Retrieve Information:得到干涉的结果From previous computation:从前一个计算得到分析结果From PDM(UNIX only with ENOVIA VPM):从PDM中得到分析结果(在UNIX系统下是ENOVIA VPM)None:(缺省)无比较Results Window /Automatically open:当进行干涉检查时自动打开结果显示窗口Display in Results box:设置缺省的显示条目list by conflict:冲突列表list by product:产品列表First line automatically selected:(缺省)自动选择冲突列表或产品列表的第一行Type of Computation:设置冲突的缺省类型和缺省的安全距离During Initial Computation:计算并显示所有冲突的深度和最小距离x.2.2 干涉检查细节设置(DMU Clash – Detailed Computation)该设置针对Clash命令,允许设置以下内容:Level of Detail:设置细节的级别Element:(缺省)让用户全面地工作于产品级别,直到查明有关的元素。

CATIA数字样机仿真机构分析CATIA数字样机仿真机构分析 (1)绪论 (2)细节分析 (3)运动仿真的流程 (4)相关概念 (5)重点一一理解各运动副的概念和创建要素 (7)基本运行与位置调整 (10)基于运动函数的模拟 (10)综合模拟 (11)序列编辑与重放 (13)基于运动仿真的数字样机分析 (14)运动副运动规律的查看与保存 (15)运动参数测量 (15)机构运动轨迹分析 (16)扫掠包络体 (17)空间分析 (18)绪论相对于物理样机,数字样机的优点不言而喻,在很大程度上可以代替物理样机的作用,随着数字样机技术的发展和日益成熟,今后会在更大的程度和更多的方面取代物理样机,提高产品的研发效率和技术水平。
学习Catia数字样机需要掌握主要几大块内容:1、工作窗口的构成和功能2、运动仿真流程的掌握3、各种运动副的运用4、基本运动学原理的掌握5、仿真机构的运行与重放6、基于运动仿真的数字样机分析技术细节分析该模块位置:CATIL Digital Mock Up — DMU kin ematicsDMU Generk Animation DMU-般动画各工具按钮的作用需要在实践操作中一步步掌握和数字, 非一朝一夕 的功夫可以消化,其基本功能都是相对简单的,但是要综合运用,必 须勤加练习细细领悟。
运动仿真的流程工具栏主要:有DMU 运动机构Kinematics运动机构更新 四大块。
以及DMI 空间分析3D数字模型—数字样机准备—静态装配(包括全面静态装配后删除限制运动的约束后自动创建运动副、全面静态装配后通过对话框利用相关约束手动创建运动副)或者直接手动创建运动副—所有必要基础运动副创建完成—分析是否需要建立关联运动副并创建—定于仿真过程中的固定件(机械装置自由度DOF变为1)—施加驱动&制定运动法则(直到机械装置自由度DOF为0)—运动模拟与分析。
相关概念1、完整的静态约束:具有装配关系的两个零部件间有3个能够限制或者规定其3D空间全部自由度的约束,保证数字样机上每一个零部件均具有空间中的唯一位置。
CATIA运动仿真DMU空间分析CATIA运动仿真DMU空间分析是一种基于CATIA软件平台进行的运动分析和仿真技术。
该技术通过对机械系统的各种运动进行模拟和分析,可以帮助设计人员更好地理解机械系统的运动行为,并找出系统中可能存在的问题。
下面将详细介绍CATIA运动仿真DMU空间分析的原理、应用和优势。
CATIA运动仿真DMU空间分析的原理是基于动力学理论和计算机仿真技术。
首先,使用CATIA软件建立机械系统的三维模型,并设定系统的运动参数,如速度、加速度等。
然后,根据模型和参数,通过解析学方法求解系统的运动方程。
最后,利用计算机仿真技术,将求解得到的运动方程转化为计算机程序,进行数字仿真。
CATIA运动仿真DMU空间分析具有广泛的应用领域。
在机械设计中,可以对机械系统的运动性能进行分析,如运动轨迹、速度、加速度等,从而优化系统设计。
在工程实施中,可以模拟和分析机械系统的各种运动情况,如工作过程中的振动、冲击等,从而预防事故和故障。
在产品制造中,可以预测机械系统的运动性能,如工件在加工过程中的变形、修正等。
另外,还可以应用于各种教育和培训活动中,提高学生和工程师的运动分析和仿真能力。
CATIA运动仿真DMU空间分析有以下几个优势。
首先,它具有较高的准确性和可靠性,能够在很大程度上预测和模拟机械系统的运动行为。
其次,它具有较高的灵活性和适用性,可以应用于不同类型的机械系统和运动场景。
再次,它具有较高的效率和便捷性,能够快速分析系统的运动性能,并给出相应的结果。
最后,它具有较高的可视化和交互性,能够直观地展示系统的运动轨迹和性能,并支持用户交互操作。
综上所述,CATIA运动仿真DMU空间分析是一种基于CATIA软件平台进行的运动分析和仿真技术,可以帮助设计人员更好地理解机械系统的运动行为,并找出系统中可能存在的问题。
它具有广泛的应用领域和较高的优势,对于机械设计、工程实施、产品制造和教育培训等方面都具有积极的促进作用。
CATIADMU运动分析1 产品介绍DMU机构运动分析(Kin)是专门做DMU装配运动仿真的模块。
针对⼤型产品如整车、飞机、轮船等的机构运动状态进⾏评价。
2 图标功能介绍(基本概念、基本界⾯介绍)2.1DMU运动仿真(DMU Simulation)⼯具条命令驱动仿真(Simulating with Commands)规则驱动仿真(Simulating With Laws)机构修饰(Mechanism Dressup)创建固定副(Fixed Part)装配约束转换(Assembly Constraints Conver)测量速度和加速度(Speeds and Accelerations)机构分析(Mechanism Analysis)2.2DMU运动副创建⼯具条(Kinematics Joints)创建转动副(Creating Revolute Joints)创建滑动副(Creating Prismatic Joints)创建同轴副(Creating Cylindrical Joints)创建球铰连接(Creating Spherical Joints)创建平动副(Creating Planar Joints)创建刚性副(Rigid Joints)点-线副(Point Curve Joints)曲线滑动副(Slide Curve Joints)点-⾯副(Point Surface Joints)万向节(Universal Joints)CV连接(CV Joints)创建齿轮副(Gear Joints)滑动-转动复合运动副(Rack Joints)滑动-滑动复合运动副(Cable Joints)⽤坐标系法建⽴运动副(Creating Joints Using Axis Systems)2.3DMU Generic Animation创建运动仿真记录(Simulation)⽣成重放⽂件(Generate Replay)重放(Replay)仿真播放器(Simulation Player)编辑序列(Edit Sequence)包络体(Swept Volume)⽣成轨迹线(Trace)2.4机构刷新(DMU Kinematics Update)机构位置刷新(Update)输⼊⼦机构(Import Sub-Mechanisms)重设位置(Reset Positions)2.5⼲涉检查模式⼯具条(Clash Mode)关闭⼲涉检查(C lash Detection(Off))打开⼲涉检查(C lash Detection(On))遇到⼲涉停⽌(C lash Detection(Stop))2.6DMU 空间分析(DMU Space Analysis)⼲涉检查(Clash)距离和距离带分析(Distance and band analysis)3 功能详细介绍3.1DMU运动仿真(DMU Simulation)⼯具条3.1.1⽤命令驱动仿真(Simulating with Commands)是⽤命令驱动的⽅式对已创建的机构进⾏运动仿真,这种⽅法⽐较直接、简便,但不能记录下来。
1产品介绍DMU机构运动分析(Kin)是专门做DMU装配运动仿真的模块。
针对大型产品如整车、飞机、轮船等的机构运动状态进行评价。
2图标功能介绍(基本概念、基本界面介绍)2.1DMU运动仿真(DMU Simulation)工具条命令驱动仿真(Simulating with Commands)规则驱动仿真(Simulating With Laws)机构修饰(Mechanism Dressup)创建固定副(Fixed Part)装配约束转换(Assembly Constraints Conver)测量速度和加速度(Speeds and Accelerations)机构分析(Mechanism Analysis)2.2DMU运动副创建工具条(Kinematics Joints)创建转动副(Creating Revolute Joints)创建滑动副(Creating Prismatic Joints)创建同轴副(Creating Cylindrical Joints)创建球铰连接(Creating Spherical Joints)创建平动副(Creating Planar Joints)创建刚性副(Rigid Joints)点-线副(Point Curve Joints)曲线滑动副(Slide Curve Joints)点-面副(Point Surface Joints)万向节(Universal Joints)CV连接(CV Joints)创建齿轮副(Gear Joints)滑动-转动复合运动副(Rack Joints)滑动-滑动复合运动副(Cable Joints)用坐标系法建立运动副(Creating Joints Using Axis Systems)2.3DMU Generic Animation创建运动仿真记录(Simulation)生成重放文件(Generate Replay)重放(Replay)仿真播放器(Simulation Player)编辑序列(Edit Sequence)包络体(Swept Volume)生成轨迹线(Trace)2.4机构刷新(DMU Kinematics Update)机构位置刷新(Update)输入子机构(Import Sub-Mechanisms)重设位置(Reset Positions)2.5干涉检查模式工具条(Clash Mode)关闭干涉检查(C lash Detection(Off))打开干涉检查(C lash Detection(On))遇到干涉停止(C lash Detection(Stop))2.6DMU 空间分析(DMU Space Analysis)干涉检查(Clash)距离和距离带分析(Distance and band analysis)3功能详细介绍3.1DMU运动仿真(DMU Simulation)工具条3.1.1用命令驱动仿真(Simulating with Commands)是用命令驱动的方式对已创建的机构进行运动仿真,这种方法比较直接、简便,但不能记录下来。
CATIA设计之DMU空间分析DMU空间分析是指通过虚拟模型进行关键部件的空间排布和碰撞检测,以确保设计的可行性。
在设计过程中,很多产品都需要各个部件之间的合理排布和保证彼此之间不会发生碰撞。
如果没有DMU空间分析,设计师只能通过二维图纸和实物模型进行判断,工作效率低下,而且可能会出现设计错误,增加制造成本。
在CATIA中进行DMU空间分析的过程如下:首先,需要建立虚拟模型,包括各个部件的CAD数据。
CATIA支持导入各种不同格式的CAD数据,如STEP、IGES、JT等。
设计师可以在CATIA中对导入的数据进行修改和组装,以获得完整的虚拟模型。
然后,设计师可以使用CATIA提供的DMU空间分析工具进行排布和碰撞检测。
CATIA提供了多种不同的功能模块,如DMU Space Analysis、DMU Clash Detection等。
设计师可以根据实际需要选择适合的模块进行使用。
在DMU Space Analysis模块中,设计师可以对各个部件进行空间排布和布局。
CATIA提供了多种布局方式,如随机布局、网格布局等。
设计师可以根据实际需要进行选择。
同时,设计师还可以设置约束条件,如水平对齐、垂直对齐等,以确保部件的相对位置符合要求。
在DMU Clash Detection模块中,设计师可以进行碰撞检测。
CATIA会自动检测各个部件之间的碰撞,并给出警告信息。
设计师可以根据警告信息进行调整和修改,以避免碰撞。
通过DMU空间分析,设计师可以在虚拟环境中快速有效地进行排布和碰撞检测,以确保设计的可行性。
与传统的二维图纸和实物模型相比,DMU空间分析更加直观和高效,可以节约大量的时间和成本。
总之,CATIA的DMU空间分析是一个非常重要的工具,它可以帮助设计师在设计过程中进行关键部件的空间排布和碰撞检测,以确保设计的可行性。
通过虚拟模型和CATIA提供的功能模块,设计师可以在虚拟环境中进行快速有效的排布和碰撞检测,提高工作效率,减少错误,节约成本。
CATIA的DMU空间分析模块可以进行设计的有效性评价。
它提供丰富的空间分析手段,包括产品干涉检查、剖面分析和3D几何尺寸比较等。
它可以进行碰撞、间隙及接触等计算,并得到更为复杂和详尽的分析结果。
它能够处理电子样机审核及产品总成过程中经常遇到的问题,能够对产品的整个生命周期(从设计到维护)进行考察。
DMU空间分析能够处理任何规模的电子样车,它适用于从日用工具到重型机械行业的各种企业。
X.1 相关的图标菜单CATIA V5的空间分析模块由一个图标菜单组成:空间分析(DMU Space Analysis)Clash: 干涉检查Sectioning: 剖面观察器Distance and Band Analysis: 距离与自定义区域分析Compare Products: 产品比较Measure Between: 测量距离和角度Measure Item: 单项测量Arc through Three Points: 测量过三点的圆弧Measure Inertia: 测量惯量3D Annotation: 三维注释Create an Annotated View: 建立注释视图Managing Annotated Views: 管理注释视图Groups: 定义产品组x.2 空间分析模块的环境参数设定在开始使用CATIA V5的空间分析模块前,我们可以根据自身的习惯特点,合理地设定其环境参数。
在菜单栏中使用下拉菜单ToolsàOptionàDigital Mockup打开DMU Spac e Analysis的环境参数设定界面,在此窗口中有六个标签,分别对应不同的参数设定。
x.2.1 干涉检查设置(DMU Clash)该设置针对Clash命令,允许设置以下内容:Retrieve Information:得到干涉的结果From previous computation:从前一个计算得到分析结果From PDM(UNIX only with ENOVIAVPM):从PDM中得到分析结果(在UNIX系统下是ENOVIA VPM)None:(缺省)无比较Results Window /Automatically open:当进行干涉检查时自动打开结果显示窗口Display in Results box:设置缺省的显示条目list by conflict:冲突列表list by product:产品列表First line automatically selected:(缺省)自动选择冲突列表或产品列表的第一行Type of Computation:设置冲突的缺省类型和缺省的安全距离During Initial Computation:计算并显示所有冲突的深度和最小距离x.2.2 干涉检查细节设置(DMU Clash – Detailed Computation)该设置针对Clash命令,允许设置以下内容:Level of Detail:设置细节的级别Element:(缺省)让用户全面地工作于产品级别,直到查明有关的元素。