CATIA实用DMU运动仿真小教程-2016
- 格式:ppt
- 大小:71.44 MB
- 文档页数:26

第五章DMU 机构运动分析1 第五章CATIA V5 DMU 机构运动分析目录1产品介绍 (4)2图标功能介绍(基本概念、基本界面介绍) (4)2.1DMU运动仿真(DMU Simulation)工具条 (4)2.2DMU运动副创建工具条(Kinematics Joints) (4)2.3DMU Generic Animation (5)2.4机构刷新(DMU Kinematics Update) (6)2.5干涉检查模式工具条(Clash Mode) (6)2.6DMU 空间分析(DMU Space Analysis) (6)3功能详细介绍 (7)3.1DMU运动仿真(DMU Simulation)工具条 (7)3.1.1用命令驱动仿真(Simulating with Commands) (7)3.1.2用规则驱动仿真(Simulating With Laws) (9)3.1.3仿真感应器(Sensors) (10)3.1.4机构修饰(Mechanism Dressup) (12)3.1.5创建固定副(Fixed Part) (12)3.1.6装配约束转换(Assembly Constraints Conver) (13)3.1.7测量速度和加速度(Speeds and Accelerations) (15)3.1.8机构分析(Mechanism Analysis) (17)3.2DMU运动副创建工具条(Kinematics Joints) (19)3.2.1创建转动副(Creating Revolute Joints)点击 (19)3.2.2创建滑动副(Creating Prismatic Joints) (20)3.2.3同轴副(Creating Cylindrical Joints) (21)3.2.4创建球铰连接(Creating Spherical Joints) (22)3.2.5创建平动副(Creating Planar Joints) (23)3.2.6创建刚性副(Rigid Joints) (24)3.2.7点-线副(Point Curve Joints) (24)3.2.8曲线滑动副(Slide Curve Joints) (25)3.2.9点-面副(Point Surface Joints) (26)3.2.10万向节(Universal Joints) (26)3.2.11C V连接(CV Joints) (27)3.2.12创建齿轮副(Gear Joints) (28)2 第五章CATIA V5 DMU 机构运动分析3.2.13滑动-转动复合运动副(Rack Joints) (30)3.2.14滑动-滑动复合运动副(Cable Joints) (32)3.2.15用坐标系法建立运动副(Creating Joints Using Axis Systems) (32)3.3DMU Generic Animation工具条 (34)3.3.1创建运动仿真记录(Simulation) (34)3.3.2生成重放文件(Generate Replay) (36)3.3.3重放(Replay) (37)3.3.4仿真播放器(Simulation Player) (37)3.3.5编辑序列(Edit Sequence) (37)3.3.6包络体(Swept Volume) (37)3.3.7生成轨迹线(Trace) (37)3.4机构刷新(DMU Kinematics Update) (38)3.4.1机构位置刷新(Update) (38)3.4.2输入子机构(Import Sub-Mechanisms) (38)3.4.3重设位置(Reset Positions ) (39)3.5干涉检查模式工具条(Clash Mode) (40)3.5.1关闭干涉检查(Clash Detection(Off) (40)3.5.2打开干涉检查(Clash Detection(On) (40)3.5.3遇到干涉停止(Clash Detection(Stop) (40)3.6DMU 空间分析(DMU Space Analysis) (40)3.6.1干涉检查(Clash) (40)3.6.2距离和距离带分析(Distance and band analysis) (40)3.7示例 (41)3 第五章CATIA V5 DMU 机构运动分析1 产品介绍DMU机构运动分析(Kin )是专门做DMU装配运动仿真的模块。


CATIA运动仿真DMU空间分析
一、CATIA关于动态仿真的介绍
CATIA动态仿真是一款非常先进和强大的模拟软件,它提供了强大的
模拟技术,它使用创建复杂机械组件和机械系统的过程变得简单,更快捷,更安全。
它提供强大的模拟技术,可以模拟机械系统的运动,尤其是双向
模拟,它可以将机械系统的运动还原到任何位置,从而更好地模拟机械系
统的运动,便于确定机械系统的建模参数,如型号,装配参数等,对于机
械模型的仿真来说,这是一个非常重要的工具,可以处理多种复杂的机械
设计任务,更好地模拟机械系统的行为,进行有效的实验验证。
二、CATIA动态仿真的功能
1、CATIA动态仿真功能:支持动画功能,可以在动画模式下模拟机
械系统的运动,准确演示机械系统的设计方案,帮助机械设计者完成机械
系统的设计;
2、双向模拟:可以模拟机械系统的双向运动,可以从模型驱动,也
可以从轨迹驱动,在复杂的机械系统中,可以模拟机械系统的双向运动,
实现机械系统动态特性的曲线和表达式,结合运动模拟可以实现选择性的
光滑动画效果;
3、空间分析:可以支持复杂机械系统的空间分析。

CATIADMU机构运动分析CATIA DMU(Digital Mock-Up)机构运动分析是一种在CATIA软件平台上进行的数字化样机的运动分析方法。
通过对机构的运动进行模拟和分析,可以评估设计的有效性、发现潜在问题,并优化设计方案。
1.建立机构模型:首先需要在CATIA软件中建立机构的几何模型,包括各个部件的几何形状、尺寸和位置关系等信息。
可以通过绘制二维草图、拖拉特定形状的线条等方式进行模型的绘制。
2.定义机构间的运动关系:在建立机构模型后,需要定义各个部件之间的运动关系。
可以通过定义关节、连杆、驱动器等方式,将不同部件之间的运动关系设定为特定的线性或非线性关系。
3.设置运动分析条件:在进行机构运动分析前,需要设置一些分析条件,比如加载条件、边界条件等。
可以根据实际情况设定机构的振动频率、加载力的大小和方向等。
4.进行机构运动分析:在设置好运动分析条件后,即可开始进行机构运动分析。
CATIA软件会根据设定的运动关系和加载条件,模拟机构的运动情况,并输出相应的运动结果。
可以对机构的运动速度、加速度、位移等参数进行分析,评估机构设计的合理性和稳定性。
5.优化机构设计:通过对机构的运动分析结果进行评估,可以发现机构设计中存在的问题,比如各个部件之间的干涉、运动范围受限等。
可以根据分析结果对机构进行优化设计,改进设计方案,提高机构的性能和可靠性。
CATIADMU机构运动分析的应用领域广泛,主要用于机械工程、航空航天工程、汽车工程等领域。
通过该方法可以在设计阶段对机构进行全面而准确的分析,减少实际制造中的试错成本和时间。
同时,还可以对机构的运动性能和可靠性进行预测和评估,为设计师提供决策支持。
在实际应用中,CATIADMU机构运动分析还可与其他分析方法相结合,比如有限元分析、流体力学分析等,以实现多学科的综合分析。
这样可以对机构的运动、结构、热力等方面进行全面分析,帮助设计师制定更合理、更优化的设计方案。

CATIA DMU运动分析1.1 曲轴连杆运动分析四缸发动机曲轴、连杆和活塞的运动分析是较复杂的机械运动。
曲轴做旋转运动,连杆左做平动,活塞是直线往复运动。
在用CATIA作曲轴、连杆和活塞的运动分析的步骤如下所示。
(1)设置曲轴、连杆、活塞及活塞销的运动连接。
(2)创建简易缸套机座。
(3)设置曲轴与机座、活塞与活塞缸套之间的运动连接。
(4)模拟仿真。
(5)运动分析。
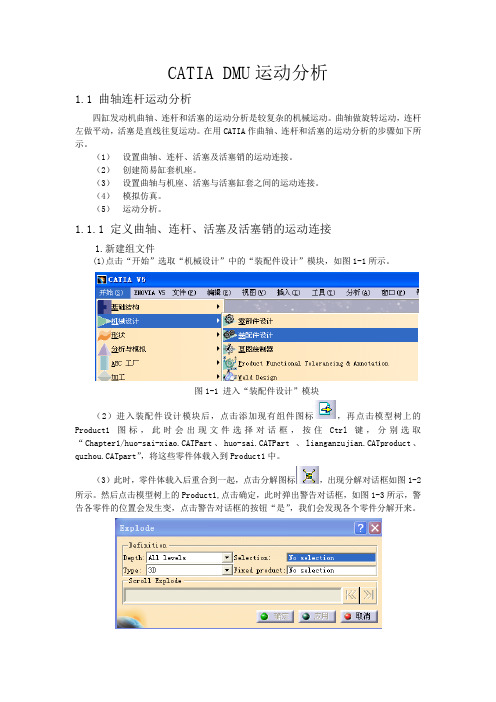
1.1.1 定义曲轴、连杆、活塞及活塞销的运动连接1.新建组文件(1)点击“开始”选取“机械设计”中的“装配件设计”模块,如图1-1所示。
图1-1 进入“装配件设计”模块(2)进入装配件设计模块后,点击添加现有组件图标,再点击模型树上的Product1图标,此时会出现文件选择对话框,按住Ctrl键,分别选取“Chapter1/huo-sai-xiao.CATPart、huo-sai.CATPart 、lianganzujian.CATproduct、quzhou.CATpart”,将这些零件体载入到Product1中。
(3)此时,零件体载入后重合到一起,点击分解图标,出现分解对话框如图1-2所示。
然后点击模型树上的Product1,点击确定,此时弹出警告对话框,如图1-3所示,警告各零件的位置会发生变,点击警告对话框的按钮“是”,我们会发现各个零件分解开来。
图1-2 分解对话框图1-3 警告对话框(3)由于连杆体零件是装配体,各部分之间存在约束,点击“全部更新”按钮,我们会发现连杆体组件恢复装配后的样子。
(4)点击“约束”工具栏中的“相合约束”图标,分别选择活塞销中心线及活塞孔中心线,如图1-4所示。
然后点击“约束”工具栏中的“偏移约束”图标,选择活塞销的一个端面及活塞孔一侧的凹下去细环端面,如图1-5所示,此时出现“约束属性”对话框,如图1-6所示。
将对话框中的“偏移”一栏改为“3.75mm”,点击“确定”按钮,完成活塞销端面和活塞内凹孔细环端面之间的偏移约束关系。