catia-第8讲 运动机构模拟
- 格式:ppt
- 大小:1.58 MB
- 文档页数:45
CATIA软件装配中的运动模拟教程CATIA(Computer-Aided Three-dimensional Interactive Application)是一款功能强大的三维建模软件,广泛应用于机械设计、装配与运动仿真等领域。
本教程将为您介绍CATIA软件在装配过程中的运动模拟功能,帮助您更好地理解和应用这一功能。
第一步:打开CATIA软件并创建装配文件在开始之前,首先确保您已经正确安装了CATIA软件。
打开软件后,选择“新建”,然后在弹出的对话框中选择“装配设计”。
第二步:导入零部件文件在装配过程中,我们需要导入零部件文件以进行后续的装配和运动模拟操作。
点击“导入”按钮,选择待导入的零部件文件,并将其添加到装配设计中。
第三步:创建关系在装配文件中,我们需要为不同零部件之间创建适当的关系,以确保它们按照预期方式进行运动。
选择“约束”工具,在零部件之间创建合适的约束关系,例如定位、配合等。
第四步:设置运动学属性在进行运动模拟之前,我们需要为每个零部件设置相应的运动学属性。
选择“属性”工具,为每个零部件设置正确的运动学类型,如旋转、平移等。
第五步:创建运动学关系运动学关系用于定义零部件之间的运动方式,将其连接起来形成一个整体模型。
选择“运动学”工具,在零部件之间创建适当的运动学关系,如齿轮、凸轮等。
第六步:设置运动规则在第五步中创建了运动学关系后,我们需要为整个装配定义运动规则。
选择“运动规则”工具,设置适当的约束和限制条件,以确保装配在运动模拟中的行为符合真实情况。
第七步:进行运动仿真完成以上准备工作后,我们可以开始进行运动仿真了。
选择“运动仿真”工具,在CATIA软件中模拟装配的运动过程,并观察各个零部件的运动轨迹、速度和加速度等参数。
第八步:分析运动仿真结果当运动仿真完成后,我们可以对仿真结果进行分析和评估。
CATIA 软件提供了丰富的可视化和数据分析工具,帮助我们深入了解装配过程中的运动性能和互动关系。

产品研发一部底盘室:马学超题目:CATIA的DMU运动机构模块功能介绍CATIA—DMU运动机构CATIA DMU 运动机构•对于产品的数字模型而言,进行准确的机构运动及状态分析,是十分基本并且重要的功能。
在DMU运动机构系统中,我们可以依照运十分基本并且重要的功能在运动机构系统中我们可以依照运动学的原理,通过约束自由度的方式建立机构,并且分析机构的运动状态与移动轨迹;态与轨•本文主要提供几种基本的结合,使我们建立机构运动,并且可以本文主要提供几种基本的结合使我们建立机构运动并且可以进行动态仿真,记录运动情形,制作成影片播放;CATIA DMU运动机构CATIA—DMU 运动机构•模块简介:CATIA—DMU运动机构CATIA DMU 运动机构•功能键一览:功能键览CATIA DMU 运动机构CATIA—DMU运动机构•过程:—————将装配件导入DMU模块建立机械装置分析运动结合类型—建立运动结合——约束固定件——设置驱动形式——(两种做法运动仿真):运动仿真)1、使用命令进行模拟(可编辑传感器,导出数据,并绘制图形);2、模拟(可生成自动播放动画,也可编辑传感器)——可通过编译模拟,生成重放,——生成包络体;CATIA DMU 运动机构CATIA—DMU运动机构•运动结合点:运动结合点从左至右结合类型依次为::旋转结合;:棱形结合;:圆柱结合;:螺钉结合;:球面结合:平面结合;:刚性结合;:点线结合;:滑动曲线结合;:滚动曲线结合;:点面结合;:通用结合;:CV结合;:齿轮结合;:架子结合;:电缆结合;:基于轴的结合;CATIA—DMU 运动机构CATIA DMU 运动机构•:旋转结合1、点击按钮,弹出右图1窗口;图12、点击右上角“新机械装置”,弹出图2窗口;图23、单击“确定”按钮,弹出图1窗口图3CATIA DMU 运动机构CATIA—DMU运动机构4、图中“直线1”、“直线2”、“平面1”、“平面2”依次选取螺栓轴线、螺母轴线、螺栓垂直轴线平面、螺母垂直轴线平面,螺栓一垂直轴线平面、螺母一垂直轴线平面,并点击“偏移”与“驱动角度”按钮,如右图4显示,并单击“确定”图4CATIA DMU 运动机构CATIA—DMU运动机构5、单击中的按钮,弹出右图所示窗口,然后直接左键单击螺弹出右图所示窗然后直接左键单击螺栓part,这时系统会出现“可以模拟机械装置”提示,点击确定CATIA—DMU运动机构CATIA DMU 运动机构6、在左侧树中双击图中高亮显示的旋转结合,在左侧树中双击图中高亮显示的“旋转”结合,便会弹出如右图5所示窗口,在窗口‐360deg和+360deg处可修改角度范围,修改完点击确定;(注意此时机械装置自由度=0,若不为0是不能仿真的,此项尤为重要,下述每个结合均是如此,不再反复强调)图5CATIA—DMU运动机构CATIA DMU 运动机构点中使用7、点击中的(使用命令进行模拟)按钮,弹出右图6所示窗口,点击“模拟”下的“立刻”按钮,便可拖动上面的游标随意旋转;也可使用“按需要”命令,修改一下右上角数字框中的数据,就可点击下方的箭头标示,使构件自行转动;图6箭头标示使构件自行转动CATIA—DMU运动机构CATIA DMU 运动机构•:棱形结合棱形结合1、单击(棱形结合)按钮,弹出如右图1所示窗口单击(棱形结合)按钮弹出如右图图12、点击右上角“新机械装置”按钮,弹出图2所示窗口图2 3、单击确定按钮,图1窗口变为图3所示窗口,图3CATIA—DMU运动机构CATIA DMU 运动机构4、窗口中“直线1”、“直线2”、“平面1”、“平面2”、分别选择螺栓轴线、螺母轴线、螺栓中的zx平面、螺母中的zx平面(所选平面必须与所选直线平行),并点选“驱动长度”按钮,如右图4所示,并单击确定;图4CATIA DMU 运动机构CATIA—DMU运动机构5、单击中的按钮,弹出右图所示窗口,然后直接左键单击螺弹出右图所示窗然后直接左键单击螺栓part,这时系统会出现“可以模拟机械装置”提示,点击确定CATIA—DMU 运动机构CATIA DMU 运动机构6、在左侧树中双击图中高亮显示的“棱形”结合,所示窗在窗便会弹出如右图5所示窗口,在窗口‐100mm 和100mm 处可修改长度范围,修改完点击确定;图5CATIA—DMU运动机构CATIA DMU 运动机构点中使用7、点击中的(使用命令进行模拟)按钮,弹出右图6所示窗口,点击“模拟”下的“立刻”按钮,便可拖动上面的游标随意移动;也可使用“按需要”命令,修改一下右上角数字框中的数据,就可点击下方的箭头标示,使构件自行移动;图6箭头标示使构件自行移动CATIA—DMU 运动机构CATIA DMU 运动机构•圆柱结合单击(圆柱结合)按钮弹出如右图图11、单击(圆柱结合)按钮,弹出如右图1所示窗口图22、点击右上角“新机械装置”按钮,弹出图2所示窗口3、单击确定按钮,图1窗口变为图3所示窗口,图3CATIA—DMU 运动机构CATIADMU 运动机构线、螺母轴线,并点选“驱动角度”、“驱动长度”按钮如右图所示并单击确定圆长度”按钮,如右图4所示,并单击确定;(圆图4柱)结合从动件既可沿轴向转动,也可同时沿轴向移动);CATIA DMU 运动机构CATIA—DMU运动机构5、单击中的按钮,弹出右图所示窗口,然后直接左键单击螺弹出右图所示窗然后直接左键单击螺栓part,这时系统会出现“可以模拟机械装置”提示,点击确定CATIA DMU 运动机构CATIA—DMU运动机构6、在左侧树中双击图中高亮显示的“圆柱面”结合,便会弹出如右图5所示窗口,在窗口‐100mm和所示窗在窗100mm处可修改长度范围,在窗口‐360deg和360deg处可修改角度范围,修改完点击确定;图5CATIA—DMU运动机构CATIA DMU 运动机构点中使用7、点击中的(使用命令进行模拟)按钮,弹出右图6所示窗口,点击“模拟”下的“立刻”按钮,便可拖动上面的游标随意移动和转动;也可使用“按需要”命令,修改一下右上角数字框中的数据,就可点击下方的箭头标示,使构件自行移动和转动;图6据就可点击下方的箭头标示使构件自行移动和转动CATIA—DMU 运动机构CATIA DMU 运动机构•螺钉结合单击(螺钉结合)按钮弹出如右图图11、单击(螺钉结合)按钮,弹出如右图1所示窗口图22、点击右上角“新机械装置”按钮,弹出图2所示窗口3、单击确定按钮,图1窗口变为图3所示窗口,图3CATIA—DMU运动机构CATIA DMU 运动机构4、窗口中“直线1”、“直线2”分别选择螺栓轴线、螺母轴线,并点选“驱动角度”、或“驱动长度”按钮,如右图4所示,并单击确定;(螺钉结合可通过驱动角度和螺距的设置控制运动,也可通过驱动长度的设置控制运动);动也可通过驱动长度的设置控制运动)图4CATIA—DMU运动机构CATIA DMU 运动机构5、单击中的按钮,单击弹出右图所示窗口,然后直接左键单击螺栓part,这时系统会出现“可以模拟机械装提示点击确定;装置”提示,点击确定;CATIA DMU 运动机构CATIA—DMU运动机构6、在左侧树中双击图中高亮显示的“螺钉”结合,便会弹出如右图5所示窗口,在窗口“螺距”处所示窗在窗“螺距”处可修改螺栓螺母的螺距,在窗口‐360deg和360deg处可修改角度范围,修改完点击确定;图5CATIA—DMU运动机构CATIA DMU 运动机构点中使用7、点击中的(使用命令进行模拟)按钮,弹出右图6所示窗口,点击“模拟”下的“立刻”按钮,便可拖动上面的游标随意移动和转动;也可使用“按需要”命令,修改一下右上角数字框中的数据,就可点击下方的箭头标示,使构件自行移动和转动;图6据就可点击下方的箭头标示使构件自行移动和转动CATIA—DMU 运动机构CATIA DMU 运动机构•球面结合(球头连接)单击(螺钉结合)按钮弹出如右图图11、单击(螺钉结合)按钮,弹出如右图1所示窗口图22、点击右上角“新机械装置”按钮,弹出图2所示窗口3、单击确定按钮,图1窗口变为图3所示窗口,图3CATIA—DMU 运动机构CATIA DMU 运动机构4、在窗口中,点1点选球头面,自动识别球心;在窗口中,点点2点选球套面,自动识别球心位置,如右图所示可先在p中建球点4所示,也可先在part 中建立球心点,前后然后点选时只需直接选取点就行,选选取完之后点击确定,点击确定之后,两球心会相合在一起;4图CATIA DMU 运动机构CATIA—DMU运动机构5、单击中的按钮,此时系统并未自动弹出“可以模拟机械装置”窗口,在树中打开“机械装置”,发现此时的自由度=3,并不等于0,所以只有球面结合和固定件的情况下,是“球面结合”和“固定件”的情况下是不能进行仿真的,“球面结合”必须和其他带有驱动性质的结合一起使用;CATIA DMU 运动机构CATIA—DMU运动机构•平面结合平面结合和球面结合的步骤基本一样,并且只是约束平面结合和固定件的话机械装置的自由度也不为0,需要和别需要和别的带有驱动性质的结合在一起使用;的带有驱动性质的结合在起使用CATIA—DMU运动机构CATIA DMU 运动机构•刚性结合刚性结指将零件具有动式零件刚性结合是指将零件与已经具有运动形式的零件固定在一起,与其做相同的运动,或是与固定件绑定在一起不做运动;窗口中的“零件1”选择已经具有运动形式零件,“零件2”选择要与之刚性结合的零件;CATIA—DMU运动机构CATIA DMU 运动机构•点曲线结合点曲线结合是指一个part以本身的一个点与另外一各part点曲线结合是指个t以本身的个点与另外各t 中的一条曲线连接点沿着曲线方向移动中的一条曲线连接,点沿着曲线方向移动;CATIA—DMU运动机构CATIA DMU 运动机构将曲线固定后,这时系统并不会提示“可以模拟机械装置”,如右图所示,机械装置的自由度=3,并不为0,因为点所在的part并没限制本身的旋转自由度,所以点曲面结合也需要与其他具有驱动特性的结合配合使用;CATIA DMU 运动机构CATIA—DMU运动机构•滑动曲线结合滑动曲线结合,顾名思义就是一条曲线沿着另一条曲线滑动,但仅仅曲线沿着另一条曲线滑动但仅仅约束滑动结合,机械装置的自由度还不为0,必须要与其他形式的结合配合使用;CATIA DMU 运动机构CATIA—DMU运动机构•滚动曲线结合滚动曲线结合,顾名思义就是一条曲线沿着另一条曲线滚动,但仅仅曲线沿着另一条曲线滚动但仅仅约束滚动结合,机械装置的自由度还不为0,必须要与其他形式的结合配合使用;CATIA DMU 运动机构CATIA—DMU运动机构•点曲面结合点曲面结合,顾名思义就是一个点在一个曲面上运动,但这是远远不够的,无论是方向还是转动的自由度都没有约束完全,方向还是转动的自由度都没有约束完全所以是不能够模拟仿真,也需要与其他形式的结合一起使用;CATIA DMU 运动机构CATIA—DMU运动机构•通用结合通用结合是两个旋转结合的复合,将第一个旋转结合进行驱动的设置,第二个旋转不用设置驱动,通过通用结合,就是将第二个旋转结合的旋转零件的轴线与第个旋转结合的旋转零件的轴线连接起来,成为第个旋转件的轴线与第一个旋转结合的旋转零件的轴线连接起来成为第一个旋转零件的从动件;具体操作如下:CATIA DMU 运动机构CATIA—DMU运动机构1、在蓝色零件和灰色零件之间建立旋转结合,命名为“旋转1”,并设置“驱动角度”;CATIA DMU 运动机构CATIA—DMU运动机构2、分别在绿色零件与灰色零件、浅蓝色零件和灰色零件之间建立旋转分别在绿色零件与灰色零件浅蓝色零件和灰色零件之间建立旋转结合,分别命名为“旋转2”、“旋转3”,这两个旋转都不设置“驱动角度”,并将灰色零件设置为固定件;旋转2旋转3CATIA DMU 运动机构CATIA—DMU运动机构3、点击(通用结合)按钮,出现如下图所示窗口,“旋转1”处选择蓝色零件轴线,“旋转2”处选择绿色零件轴线,“十字销轴线方向”选择“垂直于旋转2”,点击确定;CATIA DMU 运动机构CATIA—DMU运动机构4、重复使用通用结合,如下图所示:“旋转1”选择绿色零件轴线,“旋”选择浅蓝色零件“十字销轴线”选择“垂直于旋转”点击确转2选择浅蓝色零件,十字销轴线选择垂直于旋转1,点击确定之后,系统便会提示“可以模拟机械装置”;CATIA—DMU运动机构CATIA DMU 运动机构操作完成后,具体树的情况见右图,图中两个U形接合右图,图中两个“形接合”便是通用结合;CATIA DMU 运动机构CATIA—DMU运动机构•CV结合CV结合与通用结合一样,CV结合只是可以同时识别连接三个旋转结合,并且也是只需第一个旋转结合设置驱动角度就行,后两个旋转结合都是随动件;CATIA DMU 运动机构CATIA—DMU运动机构展开左边的树可以发现展开左边的树,可以发现,cv结合就是两个通用结合的复合,而通用结合就是两个旋转结合的复合;CATIA DMU 运动机构CATIA—DMU运动机构•齿轮结合齿轮结合也是复合结合,也要识别两个旋转结合,所以首先要在两个齿轮和支座之间建立旋转结合;CATIA—DMU运动机构CATIA DMU 运动机构点击齿轮结合,窗口中的旋转结合1、口中的“旋转结合”“旋转结合2”分别要在树中选取;比率填写小齿轮与大齿轮的分度圆直径比;旋转方向,紧挨着的两个齿轮方向相反,若两齿轮间默认有中间齿轮话,则方向相同;驱动角度依据具体情况选取主从动关系;CATIA—DMU运动机构CATIA DMU 运动机构•架子结合架子结指就轮架子结合指的就是齿轮齿条的运动结合,也是复合结合,首先要在齿条和支座之间建立棱形结合,在齿轮和支座之间建立旋转结合,建立完成之后,如右图树中所示;CATIA DMU 运动机构CATIA—DMU运动机构点击架子结合,弹出右上图,“棱形结合”处在树中选择“棱形.1”,“旋转结合”选择“旋转.2”;比率处选择定义,弹出右中图所示窗口,“半径”处选取齿轮分度圆直径,窗口会自动生成比率,点击确定,会转至右图下所示窗口;驱动方式的地方,根据具体情况选取“棱形的驱动长度”或是“旋转示窗口驱动方式的地方根据具体情况选取“棱形的驱动长度”或是“旋转的驱动角度”,点击确定完成,即可模拟仿真;CATIA—DMU运动机构CATIA DMU 运动机构•电缆结合电缆结合是指将两个滑块用虚拟滑轮通过虚拟滑轮连接起来,所以要先在绿色滑块与支撑座、蓝色滑块与支撑座之间建立棱形结合,并在“棱形1”结合中设置驱动长度,将支撑座设置为固定件;CATIA DMU 运动机构CATIA—DMU运动机构点击按钮,弹出如右上图所示窗口,图中“棱形结合1”在左边树中选取“棱形.1”,“棱形结合2”在树中选取“棱形.2”,比率根据实际数据进行填写,驱动方式选取“棱形1的”驱动长度,设置完之后点击确定,会提示“可驱动长度设置完之后点击确定会提示“可以模拟机械装置”;。

CATIA DMU模块在悬架和转向系统中的应用1.前悬架和转向系统的装配模块本文前悬架为麦弗逊悬架,转向机为齿轮齿条转向机,悬架和转向系统的运动仿真DMU共分为18个part,包括副车架、左右下摆臂、左右转向节、左右滑柱、转向机、左右转向拉杆、左右传动轴、左右举升台、左右横向稳定杆拉杆、左右横向稳定杆。
为满足运动仿真要求,其中横向稳定杆被分为左、右两个part,以实现横向稳定杆不同方向的扭转;增加了左右举升台,模拟不平路面时车轮的上下跳动。
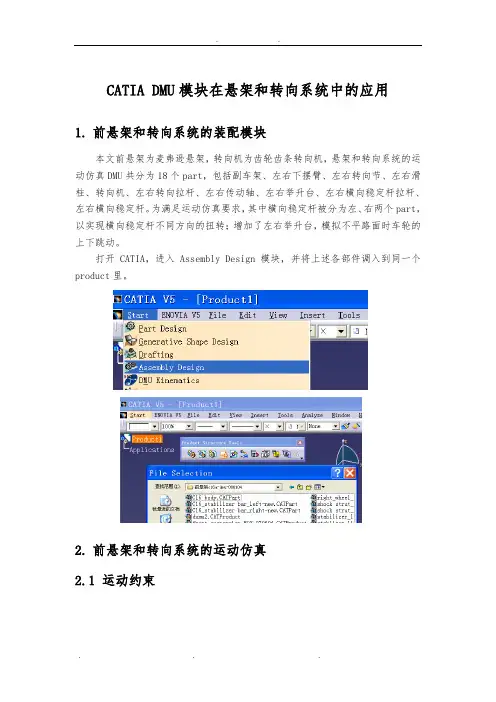
打开CATIA,进入Assembly Design模块,并将上述各部件调入到同一个product里。
2.前悬架和转向系统的运动仿真2.1 运动约束进入CATIA 的DUM Kinematics 模块,添加运动约束,具体步骤如下: ➢ 首先将固定副车架固定Fixed ,并在副车架上做出滑柱上点,下摆臂转动轴线,转向机中心线。
➢ 左下摆臂与副车架连接为revolute ,限制5个自由度,系统还有1个独立自由度运动约束工具条(点击revolute 下拉菜单弹出)Fixed revolute sphericalu jointprismaticCylindrical point surfacepoint curveRevolute joint➢左下摆臂与左转向节连接为spherical,限制3个自由度,系统还有4个独立自由度Spherical joint➢左转向节与左转向拉杆连接为spherical,限制3个自由度,系统还有7个独立自由度➢左转向拉杆与转向机连接为u joint,限制4个自由度,系统还有9个独立自由度物体1(副车架)上的旋转轴线物体2(下摆臂)上的旋转轴线物体1上的参考平面物体1上的参考平面两参考平面间距离关系物体1上的球心物体2上的球心Universal joint➢转向机与副车架连接为prismatic ,限制5个自由度,系统还有4个独立自由度Prismatic joint➢左滑柱与左转向节连接为Cylindrical,限制4个自由度,系统还有6个独立自由度物体1上的绕转轴物体2的绕转轴物体1上的滑行方向(直线)物体2上的滑行方向(直线,与1的直线重合)物体1上的平面物体2上的平面(与1的平面贴合)Cylindrical joint➢左滑柱与副车架连接为u joint,限制4个自由度,系统还有2个独立自由度➢左举升台与左转向节连接为point surface,限制1个自由度,系统还有7个独立自由度Point surface➢左举升台与副车架连接为Prismatic,限制5个自由度,系统还有2个独立自由度➢横向稳定杆(左)与副车架连接为revolute,限制5个自由度,系统还有3个独立自由度➢左横向稳定杆拉杆与横向稳定杆(左)连接为u joint,限制4个自由度,系统还有5个独立自由度➢左转向节与左横向稳定杆拉杆连接为Spherical,限制3个自由度,系统还有2个独立自由度➢右下摆臂与副车架连接为revolute,限制5个自由度,系统还有3个独立自由度物体1上的旋转轴线物体2上的旋转轴线➢右下摆臂与右转向节连接为spherical,限制3个自由度,系统还有6个独立自由度➢右转向节与右转向拉杆连接为spherical,限制3个自由度,系统还有9个独立自由度➢右转向拉杆与转向机连接为u joint,限制4个自由度,系统还有5个独立自由度➢右滑柱与右转向节连接为Cylindrical,限制4个自由度,系统还有7个独立自由度➢右滑柱与副车架连接为u joint,限制4个自由度,系统还有3个独立自由度➢右举升台与右转向节连接为point surface,限制1个自由度,系统还有8个独立自由度➢右举升台与副车架连接为Prismatic,限制5个自由度,系统还有3个独立自由度➢横向稳定杆(右)与副车架连接为revolute,限制5个自由度,系统还有4个独立自由度➢右横向稳定杆拉杆与横向稳定杆(右)连接为u joint,限制4个自由度,系统还有6个独立自由度➢右转向节与右横向稳定杆拉杆连接为Spherical,限制3个自由度,系统还有3个独立自由度➢左传动轴与左转向节连接为u joint,限制4个自由度,系统还有5个独立自由度➢左传动轴与副车架连接为point curve,限制2个自由度,系统还有3个独立自由度Point curve➢右传动轴与右转向节连接为u joint,限制4个自由度,系统还有5个独立自由度➢右传动轴与副车架连接为point curve,限制2个自由度,系统还有3个独立自由度注:系统此时的自由度数=各个约束限制的自由度数的和+当时系统的独立自由度数。

CATIA数字样机仿真机构分析CATIA数字样机仿真机构分析 (1)绪论 (2)细节分析 (3)运动仿真的流程 (4)相关概念 (5)重点一一理解各运动副的概念和创建要素 (7)基本运行与位置调整 (10)基于运动函数的模拟 (10)综合模拟 (11)序列编辑与重放 (13)基于运动仿真的数字样机分析 (14)运动副运动规律的查看与保存 (15)运动参数测量 (15)机构运动轨迹分析 (16)扫掠包络体 (17)空间分析 (18)绪论相对于物理样机,数字样机的优点不言而喻,在很大程度上可以代替物理样机的作用,随着数字样机技术的发展和日益成熟,今后会在更大的程度和更多的方面取代物理样机,提高产品的研发效率和技术水平。
学习Catia数字样机需要掌握主要几大块内容:1、工作窗口的构成和功能2、运动仿真流程的掌握3、各种运动副的运用4、基本运动学原理的掌握5、仿真机构的运行与重放6、基于运动仿真的数字样机分析技术细节分析该模块位置:CATIL Digital Mock Up — DMU kin ematicsDMU Generk Animation DMU-般动画各工具按钮的作用需要在实践操作中一步步掌握和数字, 非一朝一夕 的功夫可以消化,其基本功能都是相对简单的,但是要综合运用,必 须勤加练习细细领悟。
运动仿真的流程工具栏主要:有DMU 运动机构Kinematics运动机构更新 四大块。
以及DMI 空间分析3D数字模型—数字样机准备—静态装配(包括全面静态装配后删除限制运动的约束后自动创建运动副、全面静态装配后通过对话框利用相关约束手动创建运动副)或者直接手动创建运动副—所有必要基础运动副创建完成—分析是否需要建立关联运动副并创建—定于仿真过程中的固定件(机械装置自由度DOF变为1)—施加驱动&制定运动法则(直到机械装置自由度DOF为0)—运动模拟与分析。
相关概念1、完整的静态约束:具有装配关系的两个零部件间有3个能够限制或者规定其3D空间全部自由度的约束,保证数字样机上每一个零部件均具有空间中的唯一位置。
