船舶电动三速锚机电气线路图逆向分析法
- 格式:docx
- 大小:16.58 KB
- 文档页数:5

文献综述船舶电动锚机的控制摘要:锚机是船舶中不可缺少的部件,锚机电动机能否实现可靠的控制,是保证船舶能否安全航行的重要措施.在分析船用交流三速锚机控制系统的性能要求基础上,对继电器控制的锚机用较先进的PLC进行改进,使船舶锚机控制更加完善关键词:三速锚机;PLC 控制;系统设计1引言目前船舶电力设备电动锚机仍然以交流三速锚机在船舶上的应用较为广泛,但大多采用继电器接触器控制,系统中的活动触点多,线路复杂,主令控制器工作电流较大,可靠性差,需经常维护保养。
为了克服继电控制系统的缺陷,采用PLC可编程控制器对交流三速锚机控制线路进行改造,使控制系统的能耗和可靠性都得到进一步提高。
2船舶电动锚机的介绍船舶锚机可分为:汽动、电动、电动- 液压和内燃机驱动等几种,目前以电动锚机应用最为广泛。
虽然船舶上现在推广应用微机控制系统,但由于电动锚机所需电流和消耗功率大(功率约1000KW以上) ,其控制系统仍然多为时间继电器- 接触器系统。
电动锚机由于有可动部分和触点,故障率较高。
三速电动锚机是利用凸轮控制器控制辅电路中接触器、继电器电磁线圈电路,同时利用接触器的常开触头的吸合来控制主电路中电动机的正反、低速、中速和高速运转。
3 PLC技术的介绍可编程控制器(Programmable Controller)是计算机家族中的一员,是为工业控制应用而设计制造的。
早期的可编程控制器称作可编程逻辑控制器(Programmable Logic Controller),简称PLC,它主要用来代替继电器实现逻辑控制。
随着技术的发展,这种装置的功能已经大大超过了逻辑控制的范围,因此,今天这种装置称作可编程控制器,简称PC。
但是为了避免与个人计算机(Personal Computer)的简称混淆,所以将可编程控制器简称PLC。
4 PLC的工作原理当PLC投入运行后,其工作过程一般分为三个阶段,即输入采样、用户程序执行和输出刷新三个阶段。

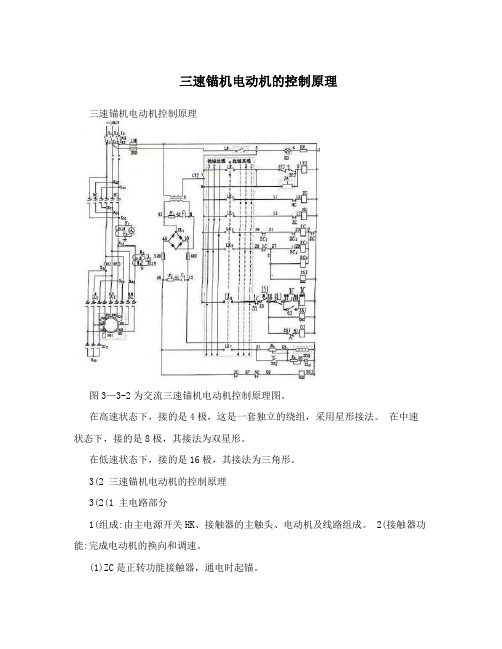
三速锚机电动机的控制原理三速锚机电动机控制原理图3—3-2为交流三速锚机电动机控制原理图。
在高速状态下,接的是4极,这是一套独立的绕组,采用星形接法。
在中速状态下,接的是8极,其接法为双星形。
在低速状态下,接的是16极,其接法为三角形。
3(2 三速锚机电动机的控制原理3(2(1 主电路部分1(组成:由主电源开关HK、接触器的主触头、电动机及线路组成。
2(接触器功能:完成电动机的换向和调速。
(1)ZC是正转功能接触器,通电时起锚。
(2)FC是反转功能接触器,通电时抛锚。
(3)1C是低速状态接触器,通电时电动机处于低速状态,3C失电。
同时联锁触头使2C(4)2C是中速状态接触器,通电时2C,、4C,得电,使电动机处于双星形接法下运行,同时其联锁触头使1C和3C失电。
(5)3C是高速状态接触器,通电时使4极独立绕组得电,电动机在高速状态下运行,同时,其联锁触头使1C、2C失电。
3(常见故障:各接触器通断状态正常而锚机工作不正常,可重点检查:接触器主触头闭合是否良好:电动机工作是否正常,重点检查绕组接线是否正常。
3(2(2 零压保护功能如果锚机在运行过程中突然失电,然后又恢复电源,没有保护功能时会使锚机突然动作,这不仅危及人身安全,也可能会损坏锚机设备,为此设有零压保护功能。
失电后只有将手柄打到0位,锚机才能重新起动。
该功能由零压继电器1J实现。
失电后,1J失电,使串接在控制电源变压器原边线路中的触头(04和06 03和09)断开,切断控制电源。
重新起动后,若主令控制器不在零位,则1J仍不能得电,处于失电状态。
只有把手柄挪到零位,才会使1J通电,1 J通电后使04和06 03和09接通,接通控制电源。
注意:零压继电器在电源接通后它总是吸合的,否则会使锚机不能工作。
3(2(3 制动功能1(锚机采用直流电磁机械制动,且为失电抱闸。
制动功能由制动电源ZL1,线圈ZDQ和相应的电路实现制动。
2(制动电源由变压器BK、整流桥ZL1,组成,通过4RD、5RD两个保险输出直流制动电源。
最常用的三速电机接线
原理图
Modified by JACK on the afternoon of December 26, 2020
最常用的三速电机接线原理图
发现很多人对于抽头调速的电机绕组比较陌生,为此特意分享一个调速绕组接线图给大家
简要说明,上图黑线表示副绕组,绿线表示主绕组,红线表示调速绕组,下图是接线原理图
该绕组的主绕组和普通电机没什么区别,显极接法。
富绕组和调速绕组同槽嵌放,各占1/2,副绕组也是显极接法,但调速绕组是每不相邻两组按庶极接法然后串联起来中间引一个抽头作为中速档,最后把调速绕组串接与主副绕组之间,接主绕组那里引出在座位高速档,接副绕组那引出作为低速档
图中1,2,3分别表示高中低三个速度,a是公共端,M是电容端,电容接到a 和M之间。
此绕组结构相对简单,线圈数量较其他形式的绕组要少,且调速性能较好。
是三速电机应用最多的一种绕组形式。

船舶电动三速锚机电气线路图逆向分析法船舶电动三速锚机电气线路图逆向分析法从锚机实际工作状况,推想“主电路”的结构船舶锚机是船舶必备的甲板机械,用于船舶安全停泊在水面上。
它的实际工作状况就是抛锚、起锚,并且有三速的选择,对锚机电动机方向控制而言就是正反转的控制。
由于锚机工作过程中,负载转矩是变化的,则电动机的转速就不能采用单一速度。
控制电动机,就是通过控制方向的接触器的主触点和控制速度的接触器的主触点的通断来实现。
选择好方向、速度,电动机就可以工作。
就电机的速度调节原理,变极调速的方法是:三速电机备有三套“极对数”P1、P2、P3供选择的独立定子绕组,对应电机就有三个速度n1、n2、n3,锚机电动机实际定子绕组有两套独立绕组组成,其中一套绕组由“三角形连接”换接成“双星型连接”,变化前后对应两个速度——低速(三角形)n1、中速(双星型)n2;另一套绕组固定接成“单星型连接”实现高速n3。
这样一来控制方向的二只接触器KM1、KM2和控制速度的四只接触器KM3、KM4-1、KM4-2、KM5(KM3对应低速,KM4-2完成把“三角形”转接成“双星行”,KM4-1负责双星行绕组接电源对应中速,KM5对应高速)一共有六只接触器,从电动机机电保护来看,有主保险、热继电器,这样一来“主电路”的构成就非常清楚。
从锚机的“主电路”组成,可推想出“控制电路”组成电动机的起动、运行、制动停止、正反转、多速度的控制是通过接触器的主触点的通断来实现,而接触器的主触点的动作是受接触器中线圈控制的,线圈有电或无电是受控制元件(按钮或主令开关)、接触器副触点、各种继电器的触点共同决定的。
对于控制电动机单一功能的控制线路,一般用按钮操作,而对于控制电动机多种功能组合的操作,采用主令开关就显得简单、方便、可靠。
锚机电路就是采用主令开关,采用主令开关操作的好处:(1)主令开关中的所有开关都是受单一手柄操作带动同轴旋转而一起变化的,操作一次可同时完成方向的确定,速度的选择。
三相异步电动机正反转接线图_三相异步电动机正反转把握电路原理图解 - 电动机为了使电动机能够正转和反转,可接受两只接触器KM1、KM2换接电动机三相电源的相序,但两个接触器不能吸合,假犹如时吸合将造成电源的短路事故,为了防止这种事故,在电路中应实行牢靠的互锁,上图为接受按钮和接触器双重互锁的电动机正、反两方向运行的把握电路。
线路分析如下:一、正向启动:1、合上空气开关QF接通三相电源2、按下正向启动按钮SB3,KM1通电吸合并自锁,主触头闭合接通电动机,电动机这时的相序是L1、L2、L3,即正向运行。
二、反向启动:1、合上空气开关QF接通三相电源2、按下反向启动按钮SB2,KM2通电吸合并通过帮助触点自锁,常开主触头闭合换接了电动机三相的电源相序,这时电动机的相序是L3、L2、L1,即反向运行。
三、互锁环节:具有禁止功能在线路中起平安爱护作用1、接触器互锁:KM1线圈回路串入KM2的常闭帮助触点,KM2线圈回路串入KM1的常闭触点。
当正转接触器KM1线圈通电动作后,KM1的帮助常闭触点断开了KM2线圈回路,若使KM1得电吸合,必需先使KM2断电释放,其帮助常闭触头复位,这就防止了KM1、KM2同时吸合造成相间短路,这一线路环节称为互锁环节。
2、按钮互锁:在电路中接受了把握按钮操作的正反传把握电路,按钮SB2、SB3都具有一对常开触点,一对常闭触点,这两个触点分别与KM1、KM2线圈回路连接。
例如按钮SB2的常开触点与接触器KM2线圈串联,而常闭触点与接触器KM1线圈回路串联。
按钮SB3的常开触点与接触器KM1线圈串联,而常闭触点压KM2线圈回路串联。
这样当按下SB2时只能有接触器KM2的线圈可以通电而KM1断电,按下SB3时只能有接触器KM1的线圈可以通电而KM2断电,假犹如时按下SB2和SB3则两只接触器线圈都不能通电。
这样就起到了互锁的作用。
四、电动机正向(或反向)启动运转后,不必先按停止按钮使电动机停止,可以直接按反向(或正向)启动按钮,使电动机变为反方向运行。
三速异步电动机正反转的电气实物连线图详解下面对三速异步电动机正反转的实物连线图进行详解:下面对线的颜色进行讲解:黄色(粗)代表三相电R,绿色(粗)代表三相电S,红色(粗)代表三相电T,黑色(粗)代表零线。
下面讲解控制回路:其中SB1、KM1控制电动机△接法下低速运转;SB2、KM2控制电动机Y接法下中速运转;SB3、KM3控制电动机YY接法下高速运转。
线路工作原理如下:先合上电源空开QF。
首先将转换开关打到正转方向。
低速启动运转按下SB1→接触器KM1和接触器KM4线圈得电一KM1辅助触头动作→电动机M第一套定子绕组出线端U1、V1W1(U3通过KM1常开触头与W1并接)与三相电源接通一>电动机M接成△低速正转运转。
低速转为中速运转先按下停止按钮SB4→KM1线圈失电一→KM1辅助触头复位一>电动机M失电一→再按下SB2→接触器KM2和接触器KM4 线圈得电→KM2辅助触头动作一>电动机M第二套定子绕组出线端U4、V4、W4与三相电源接通一→电动机M接成Y形,中速正转运转。
中速转为高速运转先按下SB4→KM2线圈失电→KM2辅助触头复位→电动机M失电一→再按下SB3一→接触器KM3和接触器KM4线圈得电一→KM3触头动作→电动机M第一套定子绕组出线端U2、V2、W2与三项电源接通(U1、V1、W1、U3则通过KM3的三对常开辅助触头并接)→电动机M接成YY型高速正转运转。
如果想要电机反转运转,首先将转换开关打到反转方向。
低速启动运转按下SB1→接触器KM1和接触器KM5线圈得电一KM1辅助触头动作→电动机M第一套定子绕组出线端U1、V1W1(U3通过KM1常开触头与W1并接)与三相电源接通一>电动机M接成△低速反转运转。
低速转为中速运转先按下停止按钮SB4→KM1线圈失电一→KM1辅助触头复位一>电动机M失电一→再按下SB2→接触器KM2和接触器KM5 线圈得电→KM2辅助触头动作一>电动机M第二套定子绕组出线端U4、V4、W4与三相电源接通一→电动机M接成Y形,中速反转运转。
船舶电动三速锚机电气线路图逆向分析法从锚机实际工作状况,推想“主电路”的结构
船舶锚机是船舶必备的甲板机械,用于船舶安全停泊在水面上。
它的实际工作状况就是抛锚、起锚,并且有三速的选择,对锚机电动机方向控制而言就是正反转的控制。
由于锚机工作过程中,负载转矩是变化的,则电动机的转速就不能采用单一速度。
控制电动机,就是通过控制方向的接触器的主触点和控制速度的接触器的主触点的通断来实现。
选择好方向、速度,电动机就可以工作。
就电机的速度调节原理,变极调速的方法是:三速电机备有三套“极对数”P1、P2、P3供选择的独立定子绕组,对应电机就有三个速度n1、n2、n3,锚机电动机实际定子绕组有两套独立绕组组成,其中一套绕组由“三角形连接”换接成“双星型连接”,变化前后对应两个速度——低速(三角形)n1、中速(双星型)n2;另一套绕组固定接成“单星型连接”实现高速n3。
这样一来控制方向的二只接触器KM1、KM2和控制速度的四只接触器KM3、KM4-1、KM4-2、KM5(KM3对应低速,KM4-2完成把“三角形”转接成“双星行”,KM4-1负责双星行绕组接电源对应中速,KM5对应高速)一共有六只接触器,从电动机机电保护来看,有主保险、热继电器,这样一来“主电路”的构成就非常清楚。
从锚机的“主电路”组成,可推想出“控制电路”组成
电动机的起动、运行、制动停止、正反转、多速度的控制是通过接触器的主触点的通断来实现,而接触器的主触点的动作是受接触器中线圈控制的,线圈有电或无电是受控制元件(按钮或主令开关)、
接触器副触点、各种继电器的触点共同决定的。
对于控制电动机单一功能的控制线路,一般用按钮操作,而对于控制电动机多种功能组合的操作,采用主令开关就显得简单、方便、可靠。
锚机电路就是采用主令开关,采用主令开关操作的好处:(1)主令开关中的所有开关都是受单一手柄操作带动同轴旋转而一起变化的,操作一次可同时完成方向的确定,速度的选择。
(2)主令开关中各个开关的通断随手柄操作是确定的,且对称有规律的,开关自身实现机械自锁,这样可简化电路;开关之间存在着固定的互锁关系,即机械互锁,为电路工作的可靠性提供重要保证,如果再加设常闭电气互锁,就构成了双重互锁,确保工作的准确无误。
(3)用主令开关的线路接线比用按钮的接线少,简化了接线,使得线路检查,故障判断也变得容易。
要想分析由主令开关操作的控制线路,必须对主令开关有透彻的理解,从结构、符号、开关的通断状况。
锚机中主令开关有正转三档、中间零位档、反转三档。
主令开关的符号如图2。
锚机的控制线路要求,主令手柄必须从“零位档”开始,目的实现零压保护,主令开关中选用SA1连接“零压继电器”线圈来实现。
两个方向不能同时选,则选用两个“机械互锁”的开关SA2连接正方向接触器KM1的线圈,SA3连接反方向接触器KM2的线圈,两个方向之间同时采用“电气互锁”。
锚机电动机的三个速度也不能同时选,则选SA4连接低速接触器KM3的线圈,SA5连接中速接触器KM4-1和KM4-2的线圈,中、低速之间通过SA4、SA5的“机械互锁”和“电气互锁”来实现。
低、高速之间的互锁是通过SA4和SA6的“机械互锁”和“电气互锁”来实现。
锚机操作可
以从“零位档”直接扳到“高速档”,按时间原则逐级自起动,防止“高速档”大的起动电流给电机带来冲击。
实际是通过“中速档”先启动电机,然后按时间切换到“高速档”;并且当“高速档”出现过流时,能自行从“高速档”退回“中速档”,这样一来,控制中速接触器的开关SA5和控制高速接触器开关SA6就不能有“机械互锁”,但可用“电气互锁”保证中速和高速之间的互锁。
中、低速档正常工作电流较小,一般用热保护;高速档最易出现过电流,故高速档可采用过电流保护。
为了躲开高速档电机的起动电流,在起动瞬间,过流继电器线圈要被短接,避开起动电流。
锚机的制动要求迅速灵敏,有电气制动和机械制动相配合,电气制动保证抛锚为等速抛锚;机械制动采用电磁刹车系统,即由可动衔铁、刹车片、电磁线圈、反力弹簧来构成。
交流电磁铁,电源方便,但有几个缺点,一般采用直流电磁铁。
这样一来,用桥式整流获取直流电源、直流电磁铁的特点:(1)线圈电流与空气隙无关,只要电压一定,电流就一定。
如果种种原因吸合时间长,电磁线圈不会因为电流大而烧坏线圈。
(2)电磁吸力与间隙有关,间隙大吸力小,间隙小吸力大。
故一旦吸合后,可串接经济电阻减小线圈电流,减小线圈发热,保护线圈,延长寿命。
(3)直流电磁铁由于电流不变,铁芯可采用整块软钢制成,铁芯可防止发热。
由于在“零位档”不能松开刹车,只有在正、反转三档才能松开刹车,所以选用SA7控制KM6来实现。
松开刹车前为保证电磁线圈加全电压,应短接经济电阻,吸合后维持应串接经济电阻。
对于继电保护,如过流、过载、欠压,一定要弄清继电器的保护原理,即继电器的电
气参数整定与其触点的动作的关系。
把上述这些分析综合起来理解,控制线路的基本框架就基本构成,分析起来条理非常清晰。
控制线路的分析本身有它的规律性,多分析、多思考就会形成相对固定的分析模式,对一个陌生的电路分析也会有指导意义,对控制线路的组成、动作就有了更深刻的掌握和理解。
故障的分析与排除
只有能熟练分析电路图,才能在理论指导下快速分析、排除故障,确保船舶的安全和正常营运。
以下用两个故障实例来说明。
锚机主令手柄操作正转一档时,电机发出嗡嗡声,但不能起动运转
原理分析:当主令开关手柄置于正转一档时,SA2和SA4分别接通KM1和KM3的线圈通电,KM1和KM3同时吸合,它们的相应三常开主触点均闭合,其他也正常时,电机应该起动运转。
故障分析:电机能发出嗡嗡声,说明有电送入电机,但电机无法起动,说明电机缺相起动,故障肯定在主电路,副电路正常。
可能的故障是:(1) 电源本身缺一相;(2) KM1或KM3的主触点中有一个吸合不好;(3)热继电器FR1的某一发热元件烧断;(4)连接接线排和电机的电缆断一根线或某一线脱落。
排除方法:首先把电机从电源中拆下,防止带电检修时,缺相电源使电机烧坏。
然后,通电操作主令手柄到反转一档,如果电机能正常运转,说明KM1的主触点有问题。
停电,修复不通的某一主触点。
如果电机仍然不转,用万用表的交流500V档带电检测线电压,正常
都为380V,测试KM1和KM3的主触点的出线端两两之间的电压,如有问题,修复问题主触点;否则再测试热继电器FR1发热元件的出线端的电压是否正常。
如有问题,断电用欧姆档测试发热元件的电阻,判断是否烧断。
主电路的故障比较好找。
真实故障:最终发现问题出在热继电器FR1发热元件烧断一个造成电源缺相,使电机无法起动。
锚机主令手柄在0位,通电发现零压继电器有电吸合,但实际操作任一档,没反应,电机不转
原理分析:手柄在零档,SA1通,FR1和FR2触点常闭,零压继电器有电吸合,其常开触点闭合,实现自锁。
故障分析:既然零位时,零压继电器有电吸合,说明SA1和FR1、FR2均没问题,问题可能出在其自锁触点和其连线上。
排除方法:用导线短接其“自锁触点”两端,再操作主令开关,若一切正常,则故障排除;否则拆开两端联线,用万用表欧姆档分别测“触点”两端和SA1两端是否通。
真实故障:零压继电器常开“自锁触点”无法接通,动触点移位,无法和两静触点同时通。