船舶操纵11
- 格式:ppt
- 大小:232.50 KB
- 文档页数:29
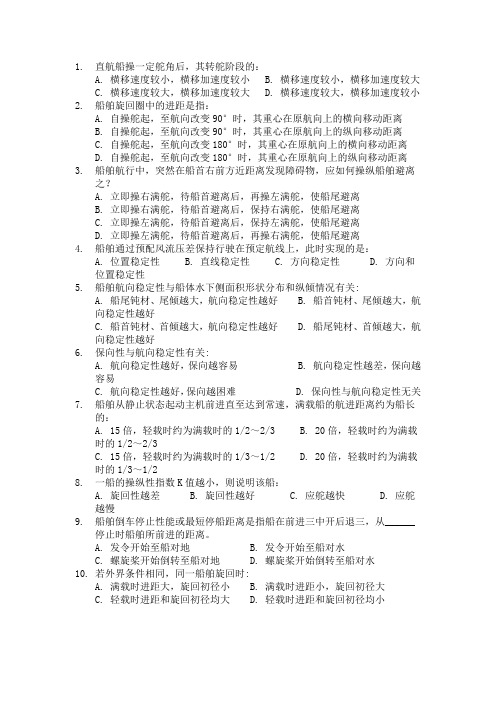
1. 直航船操一定舵角后,其转舵阶段的:A. 横移速度较小,横移加速度较小B. 横移速度较小,横移加速度较大C. 横移速度较大,横移加速度较大D. 横移速度较大,横移加速度较小2. 船舶旋回圈中的进距是指:A. 自操舵起,至航向改变90°时,其重心在原航向上的横向移动距离B. 自操舵起,至航向改变90°时,其重心在原航向上的纵向移动距离C. 自操舵起,至航向改变180°时,其重心在原航向上的横向移动距离D. 自操舵起,至航向改变180°时,其重心在原航向上的纵向移动距离3. 船舶航行中,突然在船首右前方近距离发现障碍物,应如何操纵船舶避离之?A. 立即操右满舵,待船首避离后,再操左满舵,使船尾避离B. 立即操右满舵,待船首避离后,保持右满舵,使船尾避离C. 立即操左满舵,待船首避离后,保持左满舵,使船尾避离D. 立即操左满舵,待船首避离后,再操右满舵,使船尾避离4. 船舶通过预配风流压差保持行驶在预定航线上,此时实现的是:A. 位置稳定性B. 直线稳定性C. 方向稳定性D. 方向和位置稳定性5. 船舶航向稳定性与船体水下侧面积形状分布和纵倾情况有关:A. 船尾钝材、尾倾越大,航向稳定性越好B. 船首钝材、尾倾越大,航向稳定性越好C. 船首钝材、首倾越大,航向稳定性越好D. 船尾钝材、首倾越大,航向稳定性越好6. 保向性与航向稳定性有关:A. 航向稳定性越好,保向越容易B. 航向稳定性越差,保向越容易C. 航向稳定性越好,保向越困难D. 保向性与航向稳定性无关7. 船舶从静止状态起动主机前进直至达到常速,满载船的航进距离约为船长的:A. 15倍,轻载时约为满载时的1/2~2/3B. 20倍,轻载时约为满载时的1/2~2/3C. 15倍,轻载时约为满载时的1/3~1/2D. 20倍,轻载时约为满载时的1/3~1/28. 一船的操纵性指数K值越小,则说明该船:A. 旋回性越差B. 旋回性越好C. 应舵越快D. 应舵越慢9. 船舶倒车停止性能或最短停船距离是指船在前进三中开后退三,从______停止时船舶所前进的距离。

科目:船舶操纵(一类三副10)中华人民共和国海事局适任培训大纲熟悉训练1.船舶顺浪航行时,主要危害是:() [单选题] *A.拍底B.甲板上浪C.螺旋浆打空车D.尾淹(正确答案)2在航行中发现舵机突然失灵,可采取的措施是:I .减速或停车;Il .使用应急舵;III.立即抛锚。
() [单选题] *A. I、II(正确答案)B.II、IIIC.I、IIID.I、II 、III3.船舶碰撞发生后,当破损部位确定后,应立即___,采取堵漏措施,并通知机舱排水。
() [单选题] *A.搁浅B.掉头C.弃船D.关闭邻近舱室的水密门窗(正确答案)4.影响船舶航向稳定性的因素包括,①纵倾②舵工的操舵技能③船型④舵角。
()[单选题] *A. 1234B.13(正确答案)C.23D. 2345.内河船舶驶靠码头,尾缆的主要作用是防止船舶() [单选题] *A.前移(正确答案)B.后移C.外移D.内移6.船舶在风中的偏转方向取决于() [单选题] *A.风动力中心、船舶重心、水动力中心的相对位置(正确答案)B.风动力中心的位置C.船舶重心的位置D.水动力中心的位置7.船舶在航道宽阔水域掉头,采用哪种方法经济合理() [单选题] *A.连续进车掉头(正确答案)B.正倒车掉头C.进、退车掉头D.抛锚掉头8.对同一船舶,在其它条件相同时,各种锚泊方式下的偏荡从大到小的排列顺序为() [单选题] *A.八字锚、平行错、单锚B.单锚、平行锚、八字锚(正确答案)C.平行锚、单锚、八字锚D.平行锚、八字锚、单锚9.船舶在横倾状态下低速航行,向高舷一侧用舵、舵效__。
() [单选题] *A.好B.差(正确答案)C.不变D.不能确定10.前进中的双车船,采取下列何种操纵方法,才能使船舶向右旋回圈最小?()[单选题] *A.右满舵,左车和右车全速进车B.右满能,右车停车,左车全速进车C右满能,左车全速倒车,右车全速进车D.右满能,右车全速倒车,左车全速进车(正确答案)11.有关图中船舶掉头的说法,正确的是:①掉头前,船舶应先向掉头的相反方向操舵,拉大档子,腾出水域;②船首转向90°时,即位置4时,应停车,控制船舶冲程,然后开倒车;③船舶处于位置3~4开倒车后,在后退中会出现“船尾找风”的现象。



船舶操纵1、试述船舶静止,前进,后退中的风致偏转规律。
1)船舶在静止中或船速接近于零时,船舶将顺风偏转至接近风舷角100度左右向下风飘移2)船舶在前进中,正横前来风,慢速,空船,尾倾,船首受风面积较大的船舶,船首顺风偏转;前进速度较大的船舶或满载或半载,首倾,船尾受风面积较大的船舶,船首将迎风偏转;正横后来风,船舶将呈现极强的迎风偏转性。
3)船舶在后退中,在一定风速下并有一定的退速时,船舶迎风偏转。
这就是通常的尾找风现象,正横前来风比正横后来风显著,左舷来风比右舷来风显著;退速降低时,船舶的偏转与静止时的情况相同,并受倒车横向力的影响。
船尾不一定迎风。
2、船舶在静止中的风致漂移速度与哪些因素有关?大型船舶风致漂移速度的经验值多少?静止时风致漂移速度有关因素:风速,船体水线上下侧面积,水深与吃水比3、何为船舶的风中保向界限?船舶在风中的保向界限与哪些因素有关?能够用舵保持航向的风速界限,称为保向界限。
保向界限和风速与航速之比及相对风向角有关4、风对船舶操纵的影响船型一定时,风压力中心的位置随风舷角的增大逐渐向后移动,当风舷角小于90度时,风压中心位置在船中之前,正横来风时,风压中心位于船中附近,风舷角大于90度时,风压中心位置在船中之后。
除横风外,一般风压力作用中心不在船中处,故风压力的横向分量不但改变了船舶的横向运动状态,它还会时船舶产生力矩,该力矩称为风压力矩。
它使船舶产生角加速度,进而使船舶转动角速度发生变化。
风压力系数和风压力矩系数统称为风压系数。
风压力矩与相对风舷角在关,相对风舷角与风压力系数有关。
对于同一类船型,风压力系数取决于风舷角的大小,当风舷角为0度或180度时,风压力系数横向分量为0,纵向不为0,即顶风或顺风时仅对船速有影响。
当风舷角为90度时,风压系数纵向分量为0,横向为最大,对船速没影响,对横向运动状态影响最大。
当相对风舷角为30或160度时,纵向风压系数分量为最大,横向不为0。
4.4 船舶操纵控制船舶操纵是指船舶驾驶员根据船舶操纵性能和风、浪、流等客观条件,按照有关法规要求,正确运用操纵设备,使船舶按照驾驶员的意图保持或改变船舶水平运动状态的操作。
下面介绍现代船舶航向控制和船舶主机遥控操纵。
4.4.1 船舶操纵基本原理船舶操纵是一个大系统,由人、船舶和操船环境三个小系统构成,如图4–24所示。
该系统中,船舶驾引人员是主要组成部分,他们通过掌握和处理大量信息,将操船指令输人船舶,使船舶保持或改变运动状态而达到预期的目的。
图4–25为船舶驾引人员操纵船舶流程。
图中信息A 为本船运动状态,信息B为自然环境,信息C 为航行环境,信息D 为操船手册。
操纵船舶运动的机构,主要有舵和推进动力装置。
舵是船舶操纵的重要设备,操舵者通过操舵可以使船舶保持或改变其航向,达到控制船舶方向的目的。
推进器是指把主机发出的功率转换为推船运动的专用装置或系统,目前应用最广泛的推进器是螺旋桨。
螺旋桨分为等螺距螺旋桨、变螺距螺旋桨、固定螺距螺旋桨(FPP )和可调螺距螺旋桨(CPP )等不同类型。
20世纪50年代以来,船舶自动化经历了单元自动化、机舱集中监测与控制以及主机驾驶室遥控等几个阶段。
随后,由于计算机技术和自动化技术在实船上的应用,以及空间技术和通信技术的发展,使得船舶自动化由机舱自动化朝综合自动化和智能化方向发展。
螺旋桨转速舵 角锚的使用缆的使用拖船的使用图4–25 船舶操纵流程图4.4.2 船舶航向控制船舶航向控制的主要任务有二:一是保持航向;二是航向跟踪。
航向操纵部分——自动操舵系统自1922年自动操舵仪(也称自动舵)问世到今天,已经历了机械式自动舵、PID 自动舵和自适应自动舵三个发展阶段,目前正处于第四个研究发展阶段——智能自动舵。
1. 自动操舵系统1) 常规PID 自动舵在航海自动化系统中,船舶是系统的调节对象,若略去动力装置的影响,船舶运动状态的调节,将由舵来实现,并从船首方向表现出来。
4.4 船舶操纵控制船舶操纵是指船舶驾驶员根据船舶操纵性能和风、浪、流等客观条件,按照有关法规要求,正确运用操纵设备,使船舶按照驾驶员的意图保持或改变船舶水平运动状态的操作。
下面介绍现代船舶航向控制和船舶主机遥控操纵。
4.4.1 船舶操纵基本原理船舶操纵是一个大系统,由人、船舶和操船环境三个小系统构成,如图4–24所示。
该系统中,船舶驾引人员是主要组成部分,他们通过掌握和处理大量信息,将操船指令输人船舶,使船舶保持或改变运动状态而达到预期的目的。
图4–25为船舶驾引人员操纵船舶流程。
图中信息A 为本船运动状态,信息B为自然环境,信息C 为航行环境,信息D 为操船手册。
操纵船舶运动的机构,主要有舵和推进动力装置。
舵是船舶操纵的重要设备,操舵者通过操舵可以使船舶保持或改变其航向,达到控制船舶方向的目的。
推进器是指把主机发出的功率转换为推船运动的专用装置或系统,目前应用最广泛的推进器是螺旋桨。
螺旋桨分为等螺距螺旋桨、变螺距螺旋桨、固定螺距螺旋桨(FPP )和可调螺距螺旋桨(CPP )等不同类型。
20世纪50年代以来,船舶自动化经历了单元自动化、机舱集中监测与控制以及主机驾驶室遥控等几个阶段。
随后,由于计算机技术和自动化技术在实船上的应用,以及空间技术和通信技术的发展,使得船舶自动化由机舱自动化朝综合自动化和智能化方向发展。
目标设定预测模型操船信息模型设定正确得到必要信息决定优先顺序指令N N Y Y Y N 螺旋桨转速舵 角锚的使用缆的使用拖船的使用A B C D图4–25 船舶操纵流程图4.4.2 船舶航向控制船舶航向控制的主要任务有二:一是保持航向;二是航向跟踪。
航向操纵部分——自动操舵系统自1922年自动操舵仪(也称自动舵)问世到今天,已经历了机械式自动舵、PID 自动舵和自适应自动舵三个发展阶段,目前正处于第四个研究发展阶段——智能自动舵。
1. 自动操舵系统人 船操纵环境 图4–24 船舶操纵系统 图4–25 船舶操纵流程图 A B C D N NN Y Y Y 目标设定 预 测 模 型 操船信息 模型设定正确 得到必要信息决定优先系列 预 测 模 型1) 常规PID 自动舵在航海自动化系统中,船舶是系统的调节对象,若略去动力装置的影响,船舶运动状态的调节,将由舵来实现,并从船首方向表现出来。