视觉测量流程及原理
- 格式:doc
- 大小:12.23 KB
- 文档页数:1
视觉测量原理与方法嘿,朋友们!今天咱来聊聊视觉测量原理与方法,这可真是个有意思的事儿呢!你想想看啊,咱的眼睛每天都在帮咱看世界,那这其中到底藏着啥奥秘呀?视觉测量就像是给眼睛装上了超级大脑,让它能更精准、更厉害地去感知和测量各种东西。
比如说吧,咱平时拍照,那相机不就是在进行一种视觉测量嘛!它通过镜头捕捉到的画面,把现实中的物体转化成图像信息。
这就好比是一个神奇的魔法,把三维的东西变成了二维的画面。
那它是怎么做到准确测量的呢?这就得说到那些复杂又巧妙的原理啦。
就好像咱走路一样,咱得知道自己走了多远,往哪个方向走。
视觉测量也是这样,它要确定物体的位置、大小、形状等等。
这里面涉及到好多知识呢,像什么光学原理啦,图像处理啦。
咱可以把眼睛想象成一个超级侦探,它能在一瞬间捕捉到无数的细节。
然后通过大脑这个智慧的总部,对这些信息进行分析和处理。
是不是很神奇呀?那视觉测量方法呢,就像是侦探的各种破案技巧。
有的方法就像是拿着放大镜仔细观察,不放过任何一个小细节;有的呢,则像是从不同角度去观察一个物体,这样就能更全面地了解它啦。
而且这些方法还在不断发展和进步呢,就像咱的科技一样,越来越厉害。
你说要是没有视觉测量,那咱的生活得少多少乐趣和便利呀!没有精准的测量,那些高楼大厦怎么能建得那么稳稳当当?那些漂亮的设计图怎么能变成实实在在的东西?还有啊,咱平时用的各种电子产品,不也都离不开视觉测量嘛。
所以啊,可别小看了这视觉测量原理与方法,它可是在背后默默地为我们的生活贡献着力量呢!它就像是一个无声的英雄,让我们的世界变得更加精彩和美好。
咱得好好了解它,说不定哪天咱自己也能用上这些知识,做出点了不起的事情呢!反正我是觉得这玩意儿特别有意思,特别值得我们去探索和研究。
你呢,是不是也这么觉得呀?。
视功能检查流程详解视功能检查是指通过专业仪器设备对人的视觉功能进行全面评估和量化分析的过程。
主要通过对视力、调节能力、眼球运动、眼位、立体视觉等方面的检测,以了解人眼的健康状况和各种视觉问题的性质和程度。
视功能检查的目的是为了帮助人们解决视觉问题,并提供相应的治疗方案和辅助措施。
1.病史询问和初步评估:检查前首先对患者进行病史询问,了解患者的过敏史、眼镜佩戴情况、以前的视觉问题等。
同时,医生会对患者的眼镜进行初步测量,评估是否需要进一步的视功能检查。
2.视力测量:视力测量是视功能检查的基本内容。
常见的视力测量方法包括使用近、远视力表对患者的视力进行评估。
通过测量患者的视力,可以初步判断患者有无近视、远视、散光等问题。
3.调节能力检查:调节能力检查主要是对患者的调节功能进行评估。
通过使用调节仪器,医生可以对患者的近距离调节、远距离调节、眼轴调节等功能进行测量和分析。
同时,医生还会检查患者的调节灵敏度和调节幅度,以判断患者的调节能力是否正常。
4.眼球运动检查:眼球运动检查是对患者眼球运动功能的评估。
医生会通过让患者追随移动物体的运动或让患者进行眼球运动训练,来观察患者的外眼肌运动情况。
此外,通过眼电图等仪器的使用,还可以测量和记录患者的眼球运动数据,如眼球位置、眼震等。
5.眼位检查:眼位检查是对患者眼球位置的评估。
医生会通过观察患者的眼球位置、眼球相对位置和移动方向等,来判断患者是否有斜视、偏视等问题。
同时,医生还会对患者的眼位进行定量测量,以了解患者眼球位置的具体偏移程度。
6.立体视觉检查:立体视觉检查是对患者立体视觉功能的评估。
常见的立体视觉检查方法包括立体视觉图形测量、立体视觉颜色测量等。
通过这些检测方法,医生可以评估患者的立体视觉能力,如立体视觉敏感度、立体视觉深度等。
7.结果分析和诊断:医生在完成视功能检查后,会对检查结果进行分析和评估。
通过比较患者的检查结果和正常值,医生可以判断患者是否存在视功能异常或视觉问题,并给出相应的诊断和治疗建议。
视觉测量原理与方法视觉测量是一种利用摄影测量技术和计算机图像处理技术进行测量的方法,它具有高效、快速、非接触、高精度等特点,在工程测量、地理信息系统、遥感、地质勘探等领域有着广泛的应用。
视觉测量的原理和方法是视觉测量技术的核心内容,下面将对视觉测量的原理和方法进行介绍。
一、视觉测量的原理。
视觉测量的原理是利用相机成像原理和三角测量原理进行测量。
相机成像原理是指当物体通过透镜成像到感光元件上时,形成的影像与实际物体具有一定的对应关系。
三角测量原理是指通过三角形的相似性原理,利用影像上的特征点与实际物体上的特征点之间的对应关系,可以确定物体在空间中的位置和姿态。
二、视觉测量的方法。
1. 相机标定。
相机标定是视觉测量的第一步,它是确定相机内参数和外参数的过程。
相机内参数包括焦距、主点坐标、畸变参数等,而外参数包括相机的位置和姿态。
通过相机标定,可以建立相机成像与实际物体之间的准确对应关系。
2. 特征点提取。
在进行视觉测量时,需要从影像中提取出能够对应到实际物体上的特征点。
特征点可以是角点、边缘点、纹理点等。
通过特征点的提取,可以建立影像上的坐标与实际物体上的坐标之间的对应关系。
3. 三角测量。
三角测量是视觉测量的核心内容,它是利用影像上的特征点与实际物体上的特征点之间的对应关系,通过三角形的相似性原理计算出物体在空间中的位置和姿态。
三角测量的精度和稳定性对视觉测量的结果具有重要影响。
4. 数据处理。
在完成三角测量后,需要对测量得到的数据进行处理,包括坐标转换、坐标变换、误差分析等。
数据处理的目的是提高视觉测量的精度和稳定性,保证测量结果的可靠性和准确性。
5. 应用领域。
视觉测量技术在工程测量、地理信息系统、遥感、地质勘探等领域有着广泛的应用。
在工程测量中,可以利用视觉测量技术对建筑物、道路、桥梁等进行形状和尺寸的测量;在地理信息系统中,可以利用视觉测量技术对地形、地貌、土地利用等进行监测和分析;在遥感领域中,可以利用视觉测量技术对地球表面进行高精度的测量和监测;在地质勘探中,可以利用视觉测量技术对地下资源进行勘探和评估。
视力检测原理视力检测是指通过一系列的测试,来评估人眼对物体的清晰度和对细节的分辨能力。
视力检测是眼科医生常用的一种检查方法,也是人们常见的健康检查项目之一。
视力检测的原理是基于人眼对光线的感知和对物体的成像能力,通过不同的测试方法来测量人眼的视觉功能。
下面将介绍视力检测的原理及常见的检测方法。
首先,我们来了解一下人眼的结构。
人眼主要由角膜、晶状体、虹膜、视网膜等部分组成。
光线首先通过角膜进入眼内,然后经过晶状体的折射,最终在视网膜上形成倒立的实物像。
视网膜上的感光细胞将光信号转化为神经信号,再通过视神经传输到大脑皮层,形成我们所看到的图像。
视力检测的原理是利用不同的测试图形和距离,来评估人眼对物体的清晰度和对细节的分辨能力。
常见的视力检测方法包括远视力和近视力测试、散光测试、眼位测试等。
远视力测试是通过让被检测者分辨远处图像的清晰度来评估人眼对远处物体的分辨能力。
常用的测试图形是E字表或者Landolt C图。
被检测者需要通过观察测试图形的方向来判断其清晰度,从而得出视力水平。
近视力测试则是通过让被检测者分辨近处图像的清晰度来评估人眼对近处物体的分辨能力。
常用的测试图形是Jaeger字表或者视力表。
被检测者需要通过观察测试图形的大小和清晰度来判断其视力水平。
散光测试是用来评估人眼对光线的聚焦能力的测试方法。
通过让被检测者观察散光测试图形的清晰度和形状,来判断其眼睛是否存在散光问题。
眼位测试是用来评估人眼的调节能力和眼球运动协调性的测试方法。
通过让被检测者进行眼球运动和调节动作,来评估其眼位的正常与否。
除了以上介绍的常见的视力检测方法外,还有一些特殊的视力检测方法,如色觉测试、暗适应测试等,用来评估人眼的其他视觉功能。
总的来说,视力检测的原理是基于人眼对光线的感知和对物体的成像能力,通过不同的测试方法来测量人眼的视觉功能。
视力检测是眼科医生常用的一种检查方法,也是人们常见的健康检查项目之一。
希望通过本文的介绍,能够让大家对视力检测有更深入的了解。
机器视觉测距的原理和方法
机器视觉测距是利用图像处理和计算机视觉技术来实现测量目标物体与相机之间的距离。
其原理和方法可以分为以下几种:
1. 三角测距原理:利用视差(相邻图像上同一物体的位置差异)来计算物体的距离。
通过相机的双目或多目成像系统获取多个视角的图像,从而得到图像中目标物体的视差信息,通过视差与相机的基线长度之间的关系,可以计算出距离。
2. 结构光测距原理:结构光测距是利用投射特定结构的光斑模式,通过相机观测光斑的形变来计算物体距离的一种方法。
常见的结构光测距方法有二维结构光和三维结构光。
通过对物体投射结构光,然后用相机观测结构光形变的方式,计算出物体的距离。
3. 时间-of-flight(TOF)原理:TOF测距是利用物体反射光的时间延迟来计算物体的距离。
该方法通过在相机上安装一个发射器和一个接收器,发射器发射红外激光脉冲,接收器接收到反射回来的激光脉冲。
通过测量激光脉冲的时间延迟,可以计算出物体的距离。
4. 激光三角法原理:激光测距是利用激光束在空气中传播速度恒定的特性,通过测量激光束的反射时间或相位差来计算物体的距离。
该方法通过向物体发射一个脉冲激光束,然后用相机或接收器接收反射回来的激光束,通过测量激光束的时间或相位差,可以计算出物体的距离。
综上所述,机器视觉测距的原理和方法多样化,可以根据具体应用需求选择合适的测距方法。
一、教学目标1. 让学生了解视觉测量的基本原理和常用方法。
2. 培养学生运用视觉测量技术解决实际问题的能力。
3. 增强学生的团队合作意识和创新精神。
二、教学重点与难点1. 教学重点:视觉测量的基本原理、常用方法及其在实际中的应用。
2. 教学难点:视觉测量技术在复杂环境下的应用和优化。
三、教学过程(一)导入1. 结合实际案例,介绍视觉测量技术在工业、科研、医疗等领域的应用。
2. 引导学生思考:如何利用视觉测量技术解决实际问题?(二)新课讲授1. 讲解视觉测量的基本原理,包括图像采集、图像处理、特征提取等环节。
2. 介绍常用的视觉测量方法,如特征匹配、边缘检测、轮廓提取等。
3. 分析视觉测量技术在实际应用中的优势和局限性。
(三)案例分析1. 分析典型案例,如机器视觉、工业自动化、三维测量等。
2. 引导学生思考:如何根据实际需求选择合适的视觉测量方法?(四)实践操作1. 学生分组,利用视觉测量设备进行实际操作。
2. 教师巡回指导,解答学生疑问。
(五)总结与反思1. 总结本节课所学内容,强调视觉测量的基本原理和方法。
2. 引导学生反思:如何将所学知识应用于实际项目中?四、课后作业1. 查阅资料,了解视觉测量技术在其他领域的应用。
2. 分析一个实际案例,提出改进方案。
教案范文:一、教学目标1. 让学生了解视觉测量的基本原理和常用方法。
2. 培养学生运用视觉测量技术解决实际问题的能力。
3. 增强学生的团队合作意识和创新精神。
二、教学重点与难点1. 教学重点:视觉测量的基本原理、常用方法及其在实际中的应用。
2. 教学难点:视觉测量技术在复杂环境下的应用和优化。
三、教学过程(一)导入1. 结合实际案例,介绍视觉测量技术在工业、科研、医疗等领域的应用。
例如:展示机器人焊接、自动化生产线等场景,让学生了解视觉测量在工业自动化中的应用。
(二)新课讲授1. 讲解视觉测量的基本原理,包括图像采集、图像处理、特征提取等环节。
视觉反应时间测量视觉反应时间是指从刺激物出现到个体做出反应的时间。
它是衡量个体对外界刺激做出反应速度的重要指标,也是心理学和神经科学研究中常用的实验手段之一。
在本文中,我们将介绍一种常用的视觉反应时间测量方法——反应时间测验,以及其在实验研究和应用中的意义和局限性。
一、反应时间测验的基本原理反应时间测验是通过记录个体对刺激物做出反应的时间来间接评估个体的认知加工速度和神经反应速度。
一般而言,反应时间测验包括以下几个步骤:首先,个体需要对刺激物进行观察和判断;然后,个体需要根据判断结果做出相应的反应,例如按下按钮或者给出特定的回答;最后,记录个体从刺激物出现到做出反应的时间差,即反应时间。
二、反应时间测验的应用领域1. 心理学实验研究:反应时间测验被广泛应用于心理学实验研究中,用于探究不同刺激条件下个体的认知加工速度和反应特征。
比如,在注意力研究中,可以通过比较在不同注意条件下的反应时间来了解外界刺激对个体注意力的影响。
2. 神经科学研究:反应时间测验常被用于神经科学研究中,以研究个体大脑在特定任务下的神经反应过程。
通过记录个体的反应时间,结合脑电图(EEG)和功能磁共振成像(fMRI)等技术,可以对大脑的认知加工和信息处理机制进行深入研究。
3. 心理评估和康复训练:反应时间测验也广泛应用于心理评估和康复训练领域。
例如,在注意缺陷多动障碍(ADHD)的评估中,可以通过测量患者的反应时间来评估其注意力功能的异常。
三、反应时间测验的局限性虽然反应时间测验在实验研究和应用中具有重要意义,但也存在一定的局限性。
首先,反应时间受到多种因素的影响,如个体的情绪状态、注意力水平、意愿和动机等,这些因素可能导致反应时间的变异。
其次,反应时间测验仅能间接评估个体的认知加工速度和神经反应速度,不能提供信息加工的具体过程。
最后,反应时间测验对个体的工作记忆和执行功能要求较高,可能存在部分个体由于认知能力限制而导致测量结果的不准确性。
3D机器视觉技术测量原理有哪些3D机器视觉技术是一种通过摄像机、传感器和计算机算法来获取并分析三维物体形状和结构信息的技术。
它在工业自动化、计算机辅助设计、医疗领域等各个领域都具有广泛的应用。
以下是几种常见的3D机器视觉技术测量原理。
1. 立体视觉(Stereo Vision)立体视觉是最常见也是最直观的一种3D测量技术。
它通过两个或多个摄像机同时拍摄同一场景的不同角度图像,然后通过计算机算法对图像进行处理,推算出物体的深度信息。
这种方法适用于静态场景,可以测量物体的尺寸、形状和位置等。
2. 相位测量(Phase Measurement)相位测量是一种基于物体表面的纹理或结构的光学变化来获取物体三维形状的方法。
它通过光源照射物体,使用相机记录物体表面的相位变化,然后根据相位变化来推算物体的高度信息。
这种方法精度较高,通常用于测量物体表面的细节特征,比如凹凸不平的物体表面。
3. 结构光投影(Structured Light Projection)结构光投影是一种利用投影仪投射特定的光纹或光斑到物体表面上,通过相机记录被投射光纹或光斑的畸变情况,进而推算物体的三维形状的方法。
这种方法常见的有线条结构光和格雷代码结构光。
它适用于不同尺寸和形状的物体,测量速度较快且精度较高。
4. 飞行时间法(Time-of-Flight)飞行时间法是一种通过计算光线从光源到物体表面再反射回相机所需的时间来推算物体的距离的方法。
它通过发送一个短脉冲光束,记录光束与物体表面的相互作用时间,然后根据光的速度推算出物体的距离。
这种方法在测量远距离和大尺寸物体上具有优势,但由于光传播速度受环境和表面材料的影响,精度相对较低。
以上是几种常见的3D机器视觉技术测量原理。
根据不同的应用需求和实际场景,可以选择合适的测量原理来获取物体的三维形状和结构信息。
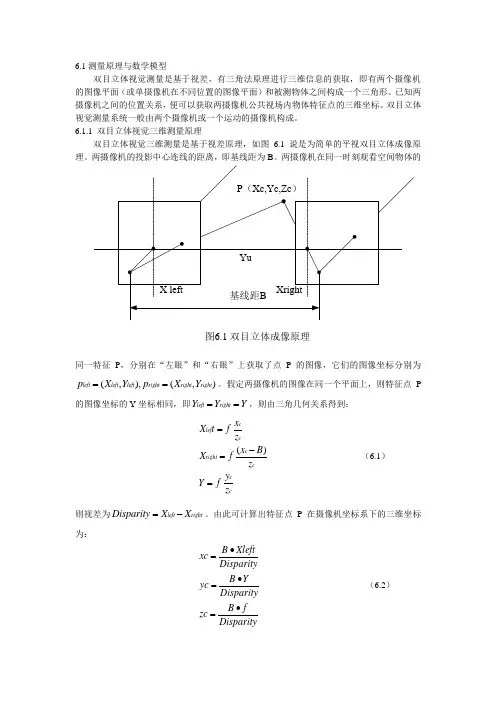
6.1测量原理与数学模型双目立体视觉测量是基于视差,有三角法原理进行三维信息的获取,即有两个摄像机的图像平面(或单摄像机在不同位置的图像平面)和被测物体之间构成一个三角形。
已知两摄像机之间的位置关系,便可以获取两摄像机公共视场内物体特征点的三维坐标。
双目立体视觉测量系统一般由两个摄像机或一个运动的摄像机构成。
6.1.1 双目立体视觉三维测量原理双目立体视觉三维测量是基于视差原理,如图6.1说是为简单的平视双目立体成像原理。
两摄像机的投影中心连线的距离,即基线距为B 。
两摄像机在同一时刻观看空间物体的图6.1 双目立体成像原理同一特征P ,分别在“左眼”和“右眼”上获取了点P 的图像,它们的图像坐标分别为(,),(,)left left left right right right p X Y p X Y ==。
假定两摄像机的图像在同一个平面上,则特征点P的图像坐标的Y 坐标相同,即left right Y Y Y ==,则由三角几何关系得到:()c lef cc right ccc x X t fz x B X f z y Y fz =-== (6.1)则视差为left right Disparity X X =-。
由此可计算出特征点P 在摄像机坐标系下的三维坐标为:B Xleft xc Disparity B Y yc Disparity B f zc Disparity •=•=•=(6.2)因此,左摄像机像面上的任意一点只要能在右摄像机像面上找到对应的匹配点(二者是空间同一点在左、右摄像机像面上的点),就可以确定出该点的三维坐标。
这种方法是点对点的运算,像面上所有点只要存在相应的匹配点,就可以参与上述运算,从而获取其对应的三维坐标。
6.1.2 双目立体视觉测量数学模型在分析了最简单的平视双目立体视觉三维测量原理基础上,现在考虑一般情况,对两个摄像机的摆放位置不做特别要求。
如图6.2所示:O图6.2 双目立体视觉测量中空间点三维重建设左摄像机O-xyz 位于世界坐标系的原点处且无旋转,图像坐标系为O 1-X 1Y 1,有效焦距为f 1;右摄像机坐标系为O r -x r y r z r ,图像坐标系为O r -X r Y r ,有效焦距为f r ,由摄像机透视变换模型有:11111000100100001001r r r r r r r r X f x s Y f y z X f x s Y f y z ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(6.3)(6.4)O-xyz 坐标系与O r -x r y r z r 坐标系之间的相互位置关系可通过空间转换矩阵M 1r 表示为:[]12314561789,11r x r r y r r z x x x r r r t y y y M r r r t M R T z z z r r r t ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦(6.5)其中,123456789,x y z r r r t R r r r T t r r r t ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦分别为O-xyz 坐标系与O r -x r y r z r 坐标系之间的旋转矩阵和原点之间的平移变换矢量。
老视验光的原理及基本流程
老视验光是一种通过测试和测量,确定人眼视力问题的方法,包括远视、近视、散光等。
以下是老视验光的原理和基本流程:
原理:
1. 光线折射:光线在进入眼睛时会发生折射,经过角膜、晶状体等组织的折射作用来聚焦在视网膜上。
2. 屈光度:视觉清晰度与眼球的屈光度有关,屈光度是用来衡量光线折射程度的单位。
基本流程:
1. 病史询问:医生会询问您的视力问题、眼部症状、用眼习惯和家族遗传情况等。
2. 视力测试:通常使用视力表进行视力测试,根据您可以看到的不同距离和大小的字母或形状,确定您的远视、近视或正常视力。
3. 自动验光:使用自动验光仪器,通过向眼睛发射光线来测量其折射情况,确定您的屈光度。
4. 看远近物体:医生会要求您观察远处和近处的物体,以评估您的视觉清晰度和调整力。
5. 散光测试:散光测试通过调整特殊的柱面透镜来检测和度量眼球的散光情况。
6. 眼底检查:使用眼底镜检查眼底的健康状况,检查视网膜、视神经和其他眼部结构是否正常。
7. 诊断和处方:根据检查结果,医生将给出准确的诊断,并开具验光处方来解决您的视力问题。
请注意,老视验光流程可能因医生或验光师的实践和设备的不同而有所差异。
强烈建议您在需要验光时咨询专业医生。
体视测量方法
体视测量是一种通过使用双目视觉系统或者体视镜来测量物体的三维尺寸的方法。
这种测量方法基于视差原理,即通过观察物体在不同角度下的位置变化来计算物体的深度信息。
以下是体视测量的基本步骤:
1. 准备双目视觉系统或体视镜:双目视觉系统通常包括两个摄像头和一个显示器,而体视镜则是一个特殊的镜子,可以将物体反射到两个不同的角度。
2. 标定系统:在开始测量之前,需要对双目视觉系统或体视镜进行标定,以确保测量结果的准确性。
这一步通常涉及到拍摄一系列标定图像或标定板,并使用算法来计算相机的内部和外部参数。
3. 采集图像:使用双目视觉系统或体视镜采集物体的图像,这些图像将包含物体在不同角度下的视差信息。
4. 图像处理:对采集到的图像进行处理,包括噪声去除、图像增强、特征提取等步骤,以便更好地识别和测量物体。
5. 计算深度信息:基于视差原理,通过比较同一物体在不同角度下的位置变化,可以计算出物体的深度信息。
这一步通常涉及到复杂的计算机视觉算法和数学计算。
6. 生成三维模型:根据计算出的深度信息,可以重建物体的三维模型,并进行后续的分析和测量。
体视测量的应用非常广泛,包括机器视觉、三维重建、工业检测、医疗诊断等领域。
这种测量方法具有非接触、高精度、高效率等优点,但也存在一定的局限性,例如对光照条件和物体表面的纹理要求较高。
第1篇一、实验目的本次实验旨在通过机器视觉技术,了解和掌握机器视觉测量系统的基本原理和操作方法,掌握图像采集、图像处理、特征提取和尺寸测量的过程。
通过实验,加深对机器视觉技术在工业生产中的应用的理解。
二、实验设备1. 机器视觉测量系统:包括工业相机、光源、图像采集卡、控制计算机等。
2. 实验样品:不同尺寸和形状的工件。
3. 图像处理软件:如MATLAB、OpenCV等。
三、实验原理机器视觉测量系统通过图像采集设备获取物体的图像,然后利用图像处理技术对图像进行处理,提取出物体的特征信息,进而实现对物体尺寸的测量。
实验中主要涉及以下原理:1. 图像采集:通过工业相机获取物体的图像,图像采集过程中需要注意曝光时间、分辨率等因素。
2. 图像处理:对采集到的图像进行预处理,如灰度化、滤波、二值化等,以去除噪声和干扰。
3. 特征提取:从处理后的图像中提取出物体的特征信息,如边缘、角点、形状等。
4. 尺寸测量:根据提取的特征信息,利用几何关系计算出物体的尺寸。
四、实验步骤1. 样品准备:将不同尺寸和形状的工件放置在实验平台上,确保样品与相机平行。
2. 光源设置:根据样品的特性选择合适的光源,如背光、侧光等,以提高图像质量。
3. 图像采集:通过工业相机获取样品的图像,并将图像传输到控制计算机。
4. 图像处理:对采集到的图像进行预处理,如灰度化、滤波、二值化等。
5. 特征提取:从处理后的图像中提取出物体的特征信息,如边缘、角点、形状等。
6. 尺寸测量:根据提取的特征信息,利用几何关系计算出物体的尺寸。
7. 结果分析:对测量结果进行分析,评估机器视觉测量系统的精度和稳定性。
五、实验结果与分析1. 图像采集:实验中使用了不同曝光时间的图像,通过对比发现,曝光时间适中时,图像质量较好,噪声较少。
2. 图像处理:通过灰度化、滤波、二值化等处理,可以有效去除噪声和干扰,提高图像质量。
3. 特征提取:通过边缘检测、角点检测等算法,可以提取出物体的特征信息,为尺寸测量提供依据。
机器视觉测量的原理机器视觉测量的原理主要包括图像获取、图像处理和信息提取三个方面。
首先是图像获取,通过相机等设备获取目标的图像信息。
然后是图像处理,将所获得的图像信息进行处理和分析,提取出目标的特征。
最后是信息提取,根据所提取的信息对目标进行测量和检测。
图像获取是机器视觉测量的第一步,它是通过相机等设备对目标进行拍摄,获得目标的图像信息。
在图像获取过程中,需要考虑光照条件、相机参数、目标的形状和表面特性等因素。
光照条件对图像质量有着重要影响,合适的光照条件可以提高图像的清晰度,而不适当的光照条件会影响测量的准确性。
相机参数包括焦距、曝光时间、光圈大小等,这些参数对图像的分辨率、对比度、色彩饱和度等有着重要影响。
目标的形状和表面特性也会影响图像的质量,例如反光、遮挡等都会影响测量的准确性。
图像处理是机器视觉测量的核心环节,它是通过图像处理和分析技术对图像信息进行处理,提取出目标的特征。
图像处理包括图像预处理、特征提取、特征匹配等步骤。
图像预处理是对图像进行去噪、增强、边缘检测等处理,以提高图像的质量和清晰度。
特征提取是从图像中提取出目标的特征,如边缘、角点、纹理等。
特征匹配是将提取的特征与事先建立的特征模型进行匹配,从而获得目标的位置、形状、尺寸等信息。
图像处理技术包括数字图像处理、模式识别、计算机视觉等方面的知识,是机器视觉测量的关键技术之一。
信息提取是机器视觉测量的最后一步,它是根据所提取的图像特征对目标进行测量和检测。
信息提取包括测量算法、数据分析、结果判定等步骤。
测量算法是根据所获得的图像特征对目标进行测量,常见的测量算法包括边缘提取算法、角点检测算法、模式匹配算法等。
数据分析是对所获得的测量数据进行统计分析和处理,以获得更为准确的测量结果。
结果判定是根据测量结果对目标进行判定,如尺寸是否合格、缺陷是否存在等。
信息提取是机器视觉测量的关键环节,它直接影响着测量的准确性和可靠性。
机器视觉测量的原理涉及到图像获取、图像处理和信息提取三个方面,是一种利用计算机和相机等设备进行测量的技术。
三维测量技术的原理及应用一、引言三维测量技术是指通过测量目标对象各个方向上的空间坐标信息,实现对目标对象外形、尺寸或位置的精确测量的一种技术。
三维测量技术在许多领域都有广泛的应用,例如工业制造、建筑工程、机械设计等。
本文将介绍三维测量技术的原理及其在实际应用中的各个方面。
二、三维测量技术的原理三维测量技术的原理主要包括以下几个方面:1. 视觉测量原理视觉测量是通过相机获取目标对象的图像信息,然后通过图像处理和计算,推导出目标对象的三维坐标信息。
视觉测量常用的方法包括立体视觉测量、结构光测量和投影仪测量等。
2. 激光测距原理激光测距是利用激光束发射器发射的激光束,通过测量激光束发射和接收的时间差,计算出目标对象与激光测距仪之间的距离。
激光测距技术精度高,适用于近距离和远距离测量。
3. 光干涉测量原理光干涉测量是利用光的波动性,在目标对象与光源之间形成干涉条纹,通过测量条纹的变化来计算目标对象的三维形状和尺寸。
光干涉测量常用的方法有干涉比较法、光栅投影法和激光条纹投影法等。
4. 三角测量原理三角测量是通过测量目标对象与测量仪器之间的几何关系来计算目标对象的空间位置信息。
三角测量常用的方法有空间三角测量法、光束平差法和三角测距法等。
三、三维测量技术的应用三维测量技术在各个领域都有广泛的应用,以下列举了部分常见的应用领域:1. 工业制造三维测量技术在工业制造领域中广泛应用于产品质量检测、尺寸测量和装配精度控制等。
例如,在汽车制造过程中,三维测量技术可用于检测车身外形的偏差、零部件的尺寸精度以及车身与零部件之间的装配精度。
2. 建筑工程在建筑工程中,三维测量技术可用于土地测量、建筑物测量和结构变形监测等。
通过三维测量技术,可以准确获取土地的地形、地貌信息,帮助设计师进行合理的土地开发规划;同时,在建筑物的测量和监测中,三维测量技术也起到了重要的作用,可以保证建筑物的安全性。
3. 机械设计在机械设计领域中,三维测量技术被广泛应用于机械零部件的测量和装配。
视觉测量流程及原理
视觉测量是一种基于计算机视觉技术的高精度测量方法,可以在不接触被测对象的情况下实现对其尺寸、形状、位置等参数的测量。
视觉测量在制造、质检、医疗、安防等领域具有广泛应用。
视觉测量的流程主要包括图像采集、图像处理、特征提取、测量计算等步骤。
首先通过相机将被测对象的图像采集下来,然后进行图像处理,包括去噪、增强、分割等步骤,以便更好地提取出被测对象的特征。
接下来进行特征提取,通过算法提取出被测对象的边缘、角点、圆心等特征点。
最后进行测量计算,将提取到的特征点输入到测量算法中,计算出被测对象的尺寸、形状、位置等参数。
视觉测量的原理主要是利用相机成像原理和数字图像处理技术。
相机拍摄被测对象的图像,将图像转换成数字信号,传输到计算机上进行处理。
通过数字图像处理技术对图像进行预处理、特征提取和测量计算,实现了对被测对象的高精度测量。
总之,视觉测量是一种高精度、无接触的测量方法,具有广泛的应用前景。
了解视觉测量的流程和原理,可以更好地应用该技术,提高测量效率和精度。
- 1 -。