房价会跌到2016年 跌去60%都有可能
- 格式:doc
- 大小:14.50 KB
- 文档页数:3

六、计算题(共15分,第1题3分,第4小题各2分,第23小题,每小题5分)1.一件货物长11米,重48吨,货物重心距离货物一端的距离为7米。
选用N16型(车长13米,销距l=9.3米)平车装运,是确定: (1)当货物重心的投影偏离货车横中心线0.5米时,是否符合装载条件?(2)计算货物重心偏离货车横重心线的最大容许位移量。
解:(1)车辆转向架承受重量:RA=Q (0.5+a/l )=48(0.5+0.5/9.3)=26.58(吨) RB=Q -RA=48-26.58=21.42(吨) RA - RB=26.58-21.42=5.61(吨)结论:承受重量大的转向架所承受货物重量未超过货车标记载重的1/2;两转向架承受重量之差未超过10吨,所以符合装载条件。
(2)货物重心在车辆纵向最大容许位移量 P 标-Q=60-48=12(吨)>10吨 因此a=5l/Q=5×9.3/48=0.97米所以货物重心在车辆纵向位移最大容许位移量为0.97米。
2.箱装均重货物一件,重46t ,15.4m, 宽3.05 m 高1.2 m 。
现有N16型平车三辆。
试分析确定最佳装载方案。
(N16标重60t ,车长L=13000mm ,车宽3000mm ,销距l=9300mm,保留整数。
) 解: 方案1:货物重心投影落在车辆中央,货物两端均突出端梁1200mm ,需要使用两辆游车,并使用符合规定的横垫木。
(该方案合理) 2分 方案2:货物一端与承重车一端平齐,另一端突出车端2400mm ,使用一辆游车。
α实= L 货2 - L 车2 =154002 - 130002 =1200(mm) 1分计算货物重心纵向最大容许偏离量α容 P 容-Q=60-46=14t>10t 1分α容= 5Q ×l= 546 ×9300 =1011(mm) 1分计算结果表明:α实>α容,即1200>1011,所以该方案不合理。


1比16锥度计算公式【实用版】目录1.引言2.锥度定义和分类3.1 比 16 锥度计算公式推导4.1 比 16 锥度计算实例5.总结正文1.引言锥度是机械加工中常见的一种几何形状,广泛应用于螺纹、齿轮等零件的加工。
在锥度加工中,1 比 16 锥度是最常用的一种。
本文将为大家介绍如何计算 1 比 16 锥度,并举例说明其应用。
2.锥度定义和分类锥度是指锥形零件的底圆直径与顶圆直径之比。
根据底圆直径和顶圆直径的大小关系,锥度可以分为正锥度和负锥度。
正锥度的底圆直径大于顶圆直径,负锥度的底圆直径小于顶圆直径。
在机械加工中,1 比 16 锥度指的是底圆直径是顶圆直径的 1/16。
3.1 比 16 锥度计算公式推导假设锥形零件的底圆直径为 d1,顶圆直径为 d2,锥度为 1 比 16,即 d1 = 16d2。
我们需要求解的是锥形零件的高度 h。
根据相似三角形原理,可以得到以下等式:(d1/2)^2 + h^2 = (d2/2)^2将 d1 = 16d2 代入,得到:(8d2/2)^2 + h^2 = (d2/2)^2化简后得到:64d2^2 + 4h^2 = d2^2进一步化简,得到:h^2 = 63d2^2所以,1 比 16 锥度的计算公式为:h = sqrt(63) * d24.1 比 16 锥度计算实例假设我们需要加工一个底圆直径为 100mm,顶圆直径为 6.25mm 的 1 比 16 锥度零件,根据公式计算其高度:h = sqrt(63) * 6.25 = 8.66mm因此,该零件的高度为 8.66mm。
5.总结本文介绍了 1 比 16 锥度的定义、计算公式及其应用。
在实际加工中,通过正确计算锥度,可以保证零件的加工精度和装配性能。
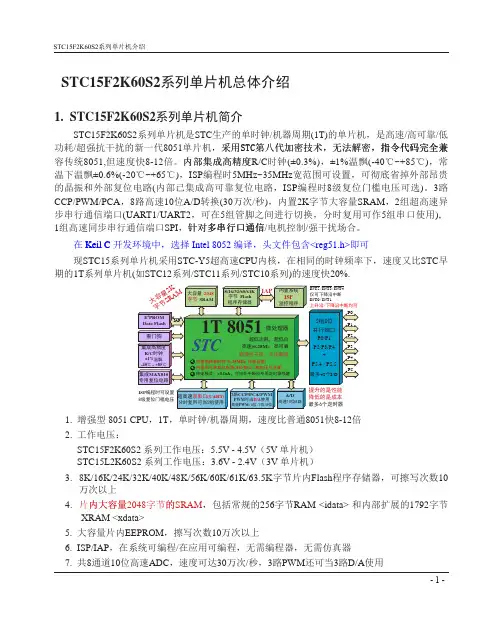
STC15F2K60S2系列单片机总体介绍1.STC15F2K60S2系列单片机简介STC15F2K60S2系列单片机是STC 生产的单时钟/机器周期(1T)的单片机,是高速/高可靠/低功耗/超强抗干扰的新一代8051单片机,�������代��技术,����,指�代�����������代��技术,����,指�代����指�代����容传统8051,但速度快8-12倍。
����高�度����高�度R/C 时钟(±0.3%),±1%温飘(-40℃~+85℃),常温下温飘±0.6%(-20℃~+65℃),ISP 编程时5MHz~35MHz 宽范围可设置,可彻底省掉外�昂贵的晶振和外�复位电路(��已��高可靠复位电路,ISP 编程时8级复位门槛电压可选)。
3路CCP/PWM/PCA ,8路高速10位A/D 转换(30万次/秒),�置2K 字节大容量SRAM ,2组超高速异步串行通信端口(UART1/UART2,可在5组管脚之间进行切换,分时复�可作5组串口使�),1组高速同步串行通信端口SPI ,���串行口通信���串行口通信�串行口通信/电机控制/强干扰场合。
在 Ke�lC Ke�l C 开发环境中,选择 Intel 8052 编译,头文件包含<reg51.h>即可现STC15系列单片机��STC-Y5超高速CPU �核,在相同的时钟频率下,速度又比STC 早期的1T 系列单片机(如STC12系列/STC11系列/STC10系列)的速度快20%.1.增强型 8051 CPU ,1T ,单时钟/机器周期,速度比普通8051快8-12倍2.工作电压:STC15F2K60S2 系列工作电压:5.5V - 4.5V (5V 单片机)STC15L2K60S2 系列工作电压:3.6V - 2.4V (3V 单片机)3.8K/16K/24K/32K/40K/48K/56K/60K/61K/63.5K 字节片�Flash 程序存储器,可擦写次数10万次以上4.片�大容量�大容量2048字节的的SRAM ,包括常规的256字节RAM <�data> 和��扩展的1792字节XRAM <xdata>5.大容量片�EEPROM ,擦写次数10万次以上6.ISP/IAP ,在系统可编程/在应�可编程,�需编程器,�需仿真器7.共8通道10位高速ADC ,速度可达30万次/秒,3路PWM 还可当3路D/A 使�8.共3通道捕获/比较单元(CCP/PWM/PCA)----也可�来再实现3个定时器或3个外�中断(支持上升沿/下降沿中断)或3路D/A9.利�CCP/PCA高速脉冲输出功能可实现3路9 ~ 16位PWM (每通道占�系统时间小于0.6%)10.利�定时器T0、T1或T2的时钟输出功能可实现高�度的8 ~ 16位PWM (占�系统时间小于0.4%)11.��高可靠复位,ISP编程时8级复位门槛电压可选,可彻底省掉外�复位电路12.工作频率范围:0MHz ~ 28MHz,相当于普通8051的0MHz~336MHz13.��高�度R/C时钟(±0.3%),±1%温飘(-40℃~+85℃),常温下温飘±0.6%(-20℃~+65℃),ISP编程时��时钟从5MHz~28MHz可设(5.5296MHz / 11.0592MHz / 22.1184MHz)14.不需外�晶振和外�复位,还可�外输出时钟和低电平复位信号15.两组超高速异步串行通信端口(可同时使�),可在5组管脚之间进行切换,分时复�可当5组串口使�:串口1(RxD/P3.0, TxD/P3.1)可以切换到(RxD_2/P3.6, TxD_2/P3.7),还可以切换到(RxD_3/P1.6, TxD_3/P1.7);串口2(RxD2/P1.0, TxD2/P1.1)可以切换到(RxD2_2/P4.6, TxD2_2/P4.7)注意:建议�户将串口1放在 P3.6/P3.7 或 P1.6/ P1.7 (P3.0/P3.1 作下载/仿真�);若�户不想切换,坚持使� P3.0/P3.1 或作为串口1进行通信,则务必在下载程序时,在软件上勾选“下次冷启动时,P3.2/P3.3为0/0时才可以下载程序”。

调心滚子轴承
角 接 触 球 轴 承
推 力 及 推 力 调 心 滚 子 轴 承◆推力圆柱滚子轴承
◆推力调心滚子轴承
◆推力圆锥滚子轴承
推 力 及 推 力 角 接 触 球 轴 承◆单向推力球轴承
◆推力角接触球轴承(Angular Contact Thrust Ball Bearing)
圆 锥 滚 子 轴 承◆单列圆锥滚子轴承
◆双列圆锥滚子轴承
◆四列圆锥滚子轴承
转 盘 轴 承四点接触球转盘轴承
◆四点接触球转盘轴承(无齿式)
◆四点接触球转盘轴承(外齿式)
◆四点接触球转盘轴承(内齿式)
双排球转盘轴承
◆双排球转盘轴承
◆交叉滚子转盘轴承
◆交叉滚子转盘轴承(无齿式)
◆交叉滚子转盘轴承(外齿式)
◆交叉滚子转盘轴承(内齿式)
◆三排组合滚子转盘轴承
◆三排组合滚子转盘轴承。
■警告及注意事項:警告y不可在送電中,實施配線工作。
y輸入電源切離後,伺服驅動器之狀態顯示CHARGE LED未熄滅前,請勿觸摸電路或更換零件。
y伺服驅動器的輸出端U、V、W,絕不可接到AC電源。
! 注意y當伺服驅動器安裝於控制盤內,若周溫過高時,請加裝散熱風扇。
y不可對伺服驅動器作耐壓測試。
y機械開始運轉前,確認是否可以隨時啟動緊急開關停機。
y機械開始運轉前,須配合機械來改變使用者參數設定值。
未調整到相符的正確設定值,可能會導致機械失去控制或發生故障。
y機械開始運轉前,務必確認參數Cn030:系列化機種設定,需選取正確的驅動器和馬達匹配組合!■安全注意事項:在安裝、運轉、保養、點檢前,請詳閱本說明書。
另外,唯有具備專業資格的人員才可進行裝配線工作。
說明書中安全注意事項區分為「警告」與「注意」兩項。
:表示可能的危險情況,如忽略會造成人員死亡或重大損傷。
警告! 注意:表示可能的危險情況,如未排除會造成人員較小或輕微的損傷及機器設備的損壞。
所以應詳閱本技術手冊再使用此伺服驅動器。
i首先,感謝您採用東元精電伺服驅動器TST A系列(以下簡稱TST A)和伺服馬達。
TST A可由數位面板操作器或透過P C人機程式來操作,提供多樣化的機能,使產品更能符合客戶各種不同的應用需求。
在使用TST A前,請先閱讀本技術手冊,本說明書主要內容包括:y y y y y 伺服系統的檢查、安裝及配線步驟。
數位面板操作器的操作步驟、狀態顯示、異常警報及處理對策說明。
伺服系統控制機能、試運轉及調整步驟。
伺服驅動器所有參數一覽說明。
標準機種的額定規格。
為了方便作日常的檢查、維護及瞭解異常發生之原因及處理對策,請妥善保管本說明書在安全的地點,以便隨時參閱。
註:請將此說明書交給最終之使用者,以使伺服驅動器發揮最大效用。
ii目錄第一章產品檢查及安裝1-1產品檢查............................................................................................................................1-1 1-1-1伺服驅動器機種確認.................................................................................................1-1 1-1-2伺服馬達機種確認.....................................................................................................1-2 1-1-3伺服驅動器與伺服馬達搭配對照表.........................................................................1-3 1-2伺服驅動器外觀及面板說明............................................................................................1-7 1-3伺服驅動器操作模式簡介................................................................................................1-8 1-4伺服驅動器安裝環境條件與方法....................................................................................1-9 1-4-1安裝環境條件.............................................................................................................1-9 1-4-2安裝方向及間隔.......................................................................................................1-10 1-5伺服馬達安裝環境條件與方法......................................................................................1-11 1-5-1安裝環境條件...........................................................................................................1-11 1-5-2安裝方式...................................................................................................................1-11 1-5-3其他注意事項...........................................................................................................1-12第二章配線準備2-1系統組成及配線................................................................................................................2-1 2-1-1伺服驅動器電源及週邊裝置配線圖.........................................................................2-1 2-1-2伺服驅動器配線說明.................................................................................................2-2 2-1-3電線規格.....................................................................................................................2-3 2-1-4馬達端出線.................................................................................................................2-4 2-1-5馬達及電源標準接線圖.............................................................................................2-6 2-1-6 TB端子說明..............................................................................................................2-7 2-1-7馬達附機械式剎車(BR A K E)接線說明....................................................................2-7 2-2I/O信號端子說明...............................................................................................................2-8 2-2-1 CN1控制信號端子說明............................................................................................2-9iii2-2-2 CN2編碼器信號端子說明......................................................................................2-21 2-3控制信號標準接線圖......................................................................................................2-23 2-3-1位置控制(Pe Mode)接線圖(L ine Dr ive r)................................................................2-23 2-3-2位置控制(Pe Mode)接線圖(Open Col l ec to r)..........................................................2-24 2-3-3位置控制(P i Mode)接線圖......................................................................................2-25 2-3-4速度控制(S Mode)接線圖.......................................................................................2-26 2-3-5轉矩控制(T Mode)接線圖.......................................................................................2-27第三章面板操作說明3-1驅動器面板操作說明........................................................................................................3-1 3-2面板顯示訊息說明............................................................................................................3-8 3-2-1狀態顯示功能說明.....................................................................................................3-8 3-2-2診斷功能說明.............................................................................................................3-9第四章試運轉操作說明4-1無負載伺服馬達試運轉....................................................................................................4-2 4-2無負載伺服馬達搭配上位控制器試運轉........................................................................4-5 4-3連接負載伺服馬達搭配上位控制器試運轉.....................................................................4-8第五章控制機能5-1控制模式選擇....................................................................................................................5-1 5-2轉矩模式............................................................................................................................5-2 5-2-1類比轉矩命令比例器.................................................................................................5-2 5-2-2類比轉矩命令偏移調整.............................................................................................5-3 5-2-3轉矩命令直線加減速.................................................................................................5-4 5-2-4轉矩輸出方向定義.....................................................................................................5-5 5-2-5內部轉矩限制設定.....................................................................................................5-6 5-2-6轉矩模式的速度限制.................................................................................................5-6 5-2-7其他轉矩控制機能.....................................................................................................5-8iv5-3速度模式............................................................................................................................5-9 5-3-1選擇速度命令...........................................................................................................5-10 5-3-2類比速度命令比例器...............................................................................................5-11 5-3-3類比速度命令偏移調整...........................................................................................5-11 5-3-4類比速度命令限制...................................................................................................5-12 5-3-5編碼器信號分周輸出...............................................................................................5-12 5-3-6速度命令平滑化.......................................................................................................5-14 5-3-7速度旋轉方向定義...................................................................................................5-17 5-3-8速度迴路增益...........................................................................................................5-18 5-3-9共振抑制濾波器(Notch F i l t e r).................................................................................5-19 5-3-10速度模式的轉矩限制............................................................................................5-21 5-3-11增益切換機能........................................................................................................5-22 5-3-12其他速度控制機能................................................................................................5-29 5-4位置模式..........................................................................................................................5-32 5-4-1外部脈波命令模式...................................................................................................5-33 5-4-2內部位置命令模式...................................................................................................5-35 5-4-3電子齒輪比...............................................................................................................5-40 5-4-4位置命令一次平滑加減速.......................................................................................5-45 5-4-5位置命令方向定義...................................................................................................5-46 5-4-6位置迴路增益調整...................................................................................................5-46 5-4-7脈波誤差量清除.......................................................................................................5-47 5-4-8原點復歸...................................................................................................................5-48 5-4-9其他位置控制機能...................................................................................................5-56 5-5伺服增益調整..................................................................................................................5-57 5-5-1自動增益調整...........................................................................................................5-61 5-5-2手動增益調整...........................................................................................................5-64 5-5-3改善響應特性...........................................................................................................5-65 5-6其他機能..........................................................................................................................5-66 5-6-1輸入/輸出接點機能規劃.........................................................................................5-66v5-6-2控制模式切換...........................................................................................................5-69 5-6-3接點輔助機能...........................................................................................................5-69 5-6-4剎車模式...................................................................................................................5-70 5-6-5機械剎車時序...........................................................................................................5-70 5-6-6 C W/C C W驅動禁止方式.........................................................................................5-72 5-6-7外部回生電阻的選用...............................................................................................5-72 5-6-8風扇運轉設定...........................................................................................................5-77 5-6-9類比監視...................................................................................................................5-77 5-6-10參數重置................................................................................................................5-78第六章參數機能6-1參數群組說明...................................................................................................................6-1 6-2參數機能表.......................................................................................................................6-2第七章通訊機能7-1通訊機能(RS-232 & RS-485).......................................................................................7-1 7-1-1通訊接線.....................................................................................................................7-1 7-1-2 RS-232通訊協定及格式...........................................................................................7-2 7-1-3 RS-485通訊協定及格式...........................................................................................7-5 7-2各參數相對應之通訊位址..............................................................................................7-16第八章異常警報排除8-1異常警報說明.....................................................................................................................8-1 8-2異常排除對策.....................................................................................................................8-3vi第一章產品檢查及安裝1-1 產品檢查本伺服產品在出廠前均做過完整之功能測試,為防止產品運送過程中之疏忽導致產品不正常,拆封後請詳細檢查下列事項:y 檢查伺服驅動器與伺服馬達型號是否與訂購的機型相同。
1比16锥度计算公式
【原创版】
目录
1.锥度定义与计算公式
2.1 比 16 锥度的含义
3.1 比 16 锥度计算方法
4.应用实例
正文
一、锥度定义与计算公式
锥度是机械加工中常见的一种几何形状,它是指圆锥的底面直径与锥高之比。
在机械制造中,锥度常常用来连接两个轴,以实现传递扭矩和运动的功能。
锥度的计算公式为:锥度=(底面直径 - 顶面直径)/锥高。
二、1 比 16 锥度的含义
1 比 16 锥度是指锥度的底面直径与锥高之比为 1:16。
换句话说,如果锥度的底面直径为 1,那么锥高就是 16。
1 比 16 锥度在机械加工中应用广泛,尤其是在螺纹连接和轴承安装等方面。
三、1 比 16 锥度计算方法
要计算 1 比 16 锥度,可以按照以下步骤进行:
1.确定底面直径和高。
例如,底面直径为 d,高为 h。
2.计算锥度。
锥度=(d-0)/h,其中 0 表示顶面直径,因为锥度是底面直径与顶面直径之差。
3.计算 1 比 16 锥度。
1 比 16 锥度=锥度×16。
四、应用实例
在实际应用中,1 比 16 锥度常常用于螺纹连接。
例如,M12 的螺纹底孔直径为 12mm,根据 1 比 16 锥度,可以计算出锥形螺纹的长度为192mm。
在轴承安装中,1 比 16 锥度也常常用来确定轴承外圈与轴的配合尺寸,以保证轴承能够紧密地安装在轴上。
牛刀:房价会跌到2016年跌去60%都有可能
中国经济已经开始进入通缩
所谓通缩,是指通货紧缩。
从2010年10月,央行第一次加息开始,中国就开始进入通货紧缩。
在经济形态上来讲,进入通货紧缩的第一年,是通货膨胀的高峰,什么商品都涨;第二年第三年是滞胀,也就是经济增长已经减速而通胀没有消除;第四年通胀得到消除,经济进入调整和衰退。
按照规律,货币紧缩效应传导到市场上的效应是一至两年,只要货币处在通缩状态下,房价就会一直下跌。
到今年10月,是通缩的第二年,中国处在滞胀年代。
写字楼空置率不断攀高
摩天大楼指数是经济学上普遍关注的一大指数。
1999年,德意志银行证券驻香港分析师安德鲁.劳伦斯首度提出「摩天大楼指数」(Skyscraper Index)的概念,因为他发现到经济衰退或股市萧条往往都发生在新高楼落成的前后。
宽松的政府政策及对经济乐观的态度,经常会鼓励大型工程的兴建。
然而,当过度投资与投机心理而起的泡沫即将危及经济时,政策也会转为紧缩以因应危机,使得摩天大楼的完工成为政策与经济转变的先声。
这一惊人发现被称为“百年病态关联”:大厦建成,经济衰退。
故此,“摩天大楼指数”也被称为“劳伦斯魔咒”。
在中国也没有逃脱这种魔咒。
不久前,我去上海陆家嘴,陪同一位朋友到环球金融中心[最新消息价格户型点评][最新消息价格户型点评]。
这里的去年的空置率只有35%,已经偏高,而今年已经到达45%,真正的出租率只有55%,还有许多跨国公司和金融机构(包括公募基金和私募基金)正在准备撤出。
在50多层100左右平方米的写字楼,环球金融中心的租金和物业费一个月需要4万人民币,而在北外滩的宝矿大厦20多层同样的写字楼只需不到2万元。
尽管宝矿大厦租金有优势,空置率同样不断攀高,也同样面临很多公司正在搬走。
高档写字楼出现空置率不断攀高,说明一个经济现象,那就是经济已经在衰退。
珠三角风光不再
这次去深圳,深圳的老同事老朋友和香港财经传媒的朋友都聊起经济,自然谈起了深圳出口贸易首次出现负增长,珠三角中小企业一批一批的关闭和迁走。
东莞、惠州,甚至河源,再也找不到当年那种到处都是灯火辉煌的景象了。
自去年9月份以来,深圳单月出口增幅进入个位数,尤其是对美欧两大传统市场出口连续5个月单月出口负增长。
今年1-2月,深圳进出口562.9亿美元,同比下降3.5%,增速分别低于广东省和全国4.6和10.8个百分点,其中出口327亿美元,同比下降6%,增速分别低于广东省和全国6.7和12.9个百分点。
在2012年前两个月,深圳规模工业增加值为720.65亿元,比上年同期减少3.0%;规模以上工业销售产值为2754.43亿元,比上年同期减少5.4%;工业产品销售率为100.2%,比上年同期减少了0.1个百分点;出口总额327亿美元,比上年同期减少了6个百分点。
和深圳一样,整个广东省,经济都处在衰退状态。
长三角危机
去年去给南京工业大学学生讲讲中国经济时,是我第一次坐高铁去南京。
从上海出发,一直到南京,沿途经过昆山、苏州、无锡、镇江到南京,江南水乡的影子都不见了,高铁沿线的两边全都是成片成片的幢幢楼房。
长三角经济已经陷入了深度衰退之中。
原本是中国最重要的工业基地,有着许多悠久的历史品牌,这些年再也没有新的品牌诞生,相反,是一些品牌的不断消失。
中国科技的创新能力基本谈不上,就连科技的应用水平都处在底端。
要改变这一切,没有一个好的经济和人文环境根本谈不上。
至于京沪穗财政负增长说明政府正在让利于民。
一切都说明中国正在面临大转型阶段。
转型期间,我们要对经济暂时减速所产生的问题,有个充分的准备。
货币紧缩问题
市场上一直有一种声音,要求放松货币,其实是不可能的。
我们来分析一下原因:
首先我们要知道,人民币正处在国际化的关键时期,目前从货币当局高层传出的时间表是这样的,今年实行利率自由浮动波幅加大到0.5%,明年有可能扩大到1%,后年将要实行利率自由浮动与国际化接轨;在2016年之前,人民币将要实行自由兑换,那时,我们中小投资人才可以真正投资全球。
现在中国经济是否能真正走向全球,取决于人民币的国际化进程速度。
换一句话来说,2016年前,货币不可能宽松。
具体原因,我就不一一细说。
其次,房地产和金融业已经蚕食了中小企业的所有利润,不可能持续下去。
我们要实行经济的转型,现在的生产成本和生活成本无法进行下去,企业无法生存。
讲一个小故事,几年前我常去一家湘菜馆小吃,与老板很熟。
2010年通胀爆发时,正恰逢赶上他的租约到期,房东要求他加租金,他算了一笔帐,如果提高租金,他将要面临亏损或者完全不赚钱,和房东谈过几次,未能达成协议,他只得转租离现在800米远的一处地铺,那里显然没有现在这里旺,但是,租金要低得多。
他搬走后,房东便在两个月后,将此地重新租出,也开的是一家家乡菜馆。
不到一年半,这家家乡菜馆就关门,至今还没有人接手。
他跟我说起此事,他算得很准,就这么多人吃饭,一年就赚这些钱,多交了租金就赚不了钱。
地价上涨,影响了所有中小企业的生存,是个不争的事实。
如果我们容忍地价无限上涨,就不可能有什么内需。
再来看看房价
外资已经逃离房地产,27家央企非房地产公司已经退出房地产,权贵资本全部出逃。
接下来一个主要时间节点提请市场注意:一个是6月份,一个是12月份,开发商面临两个偿债高峰,都是房价大跌的时间节点。
有开发商能支撑到2016年吗?我想没有。
房地产是一项资金密集型行业,除非贷款无限循环上涨,否则,不降价出货谁也无法生存。
只要注意M2是否处在13%左右运行就行了。
如果M2一直在13%左右运行,那说明货币一直处在紧缩状态,房价就会一直下跌,这个逻辑是谁都懂的。
所以,房价一直会跌到2016年。
在新的一轮经济增长周期到来之前,房价都不可能上涨。
很多楼盘可能不仅仅只是跌去50%,甚
至跌去60%都有可能。
泡沫彻底破了。
至于各地均价和国家统计局的数据,有可能到处都是五折卖楼的时候,而国家统计局的数据房价均价只下降只有1.5%。