坐标转换之计算公式+7参+四参模型
- 格式:doc
- 大小:191.50 KB
- 文档页数:3
七参数四参数的坐标转换与应用七参数和四参数是地理坐标转换中常用的参数化模型,用于描述不同坐标系之间的转换关系。
在地理信息系统(GIS)和测量工程中,由于地球本身的形状和椭球体模型的差异,不同坐标系之间存在一定的差异,因此需要进行坐标转换。
七参数转换模型包括三个平移参数、三个旋转参数和一个比例因子参数。
平移参数用于描述两个坐标系之间的原点平移关系,旋转参数用于描述坐标系之间的旋转关系,比例因子参数用于描述坐标系之间的尺度差异。
四参数转换模型只包括三个平移参数和一个比例因子参数,没有旋转参数。
这种模型适用于转换关系中不考虑旋转的情况,一般用于小范围地理坐标转换。
在坐标转换中,七参数和四参数通常需要通过观测数据进行估计。
观测数据可以采用全球定位系统(GPS)进行测量,或者使用已知控制点进行引线测量。
通过观测数据的处理和分析,可以得到最优的转换参数。
七参数和四参数的应用非常广泛。
一方面,它们可以用于不同地理坐标系之间的转换,例如WGS84坐标系和北京54坐标系之间的转换。
另一方面,它们可以用于地形变形分析和大地测量中的坐标转换,例如地震监测和地质断层研究。
此外,七参数和四参数还可以在地图投影中使用,用于不同投影坐标系之间的转换。
总的来说,七参数和四参数是地理坐标转换中常用的参数化模型。
它们的应用涵盖了地理信息系统、测量工程、地形变形分析、大地测量和地图投影等领域。
通过准确的坐标转换,可以实现不同坐标系之间的数据交互和集成,为地理空间信息的有效应用提供技术支持。
坐标转换程序:(1)四参数和七参数的计算
个人想分享一些在大学中编写的一些程序,在进行坐标转换的时候,我们经常涉及到四参数与七参数的计算,在文章中,采用C#语言来进行编程,方便计算。
(1)四参数的计算:
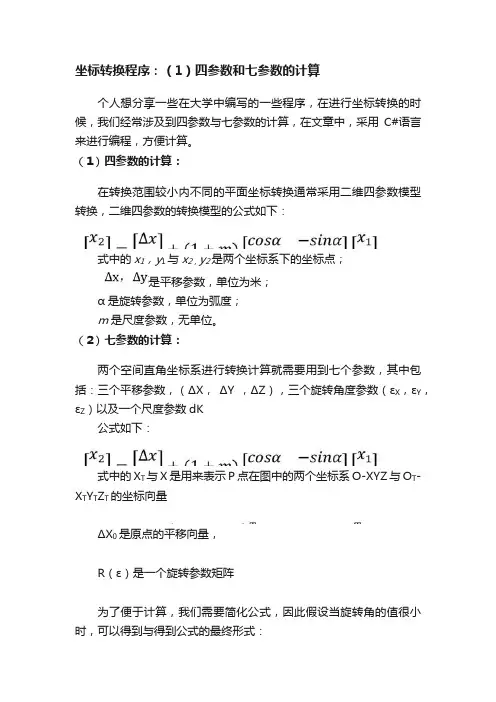
在转换范围较小内不同的平面坐标转换通常采用二维四参数模型转换,二维四参数的转换模型的公式如下:
式中的x1,y1与x2,y2是两个坐标系下的坐标点;
是平移参数,单位为米;
α是旋转参数,单位为弧度;
m是尺度参数,无单位。
(2)七参数的计算:
两个空间直角坐标系进行转换计算就需要用到七个参数,其中包括:三个平移参数,(ΔX,ΔY ,ΔZ),三个旋转角度参数(εX,εY,εZ)以及一个尺度参数dK
公式如下:
式中的X T与X是用来表示P点在图中的两个坐标系O-XYZ与O T-X T Y T Z T的坐标向量
∆X0是原点的平移向量,
R(ε)是一个旋转参数矩阵
为了便于计算,我们需要简化公式,因此假设当旋转角的值很小时,可以得到与得到公式的最终形式:
(3)四参数转换主要代码:
(4)七参数转换主要代码:。
三参数、四参数、七参数等坐标系转换参数求解-回复在地理信息系统(GIS)和空间数据处理中,经常需要进行不同坐标系之间的转换。
常见的坐标系转换方法包括三参数、四参数和七参数等。
本文将一步一步地讲解这些坐标系转换参数的求解方法。
1. 三参数坐标系转换参数求解三参数坐标系转换是一种基本的坐标系转换方法,适用于同一地区内的小范围转换。
这种方法使用三个参数来描述转换,分别是平移参数(delta X 和delta Y)和旋转参数(delta Z)。
其数学模型可以表示为:X_new = X_old + delta X + delta Z * Y_oldY_new = Y_old + delta Y - delta Z * X_oldZ_new = Z_old要求解这三个参数,通常需要至少三对已知的坐标点。
已知的坐标点可以是在两个不同坐标系中测量得到的。
下面是求解三参数坐标系转换参数的步骤:步骤1:选择至少三对已知的坐标点,并在两个不同坐标系中用坐标系A 和坐标系B表示。
步骤2:通过观察坐标系A和坐标系B之间的关系,将数学模型中的公式改写为总体误差最小的形式。
步骤3:将已知坐标点的坐标值代入改写后的数学模型,得到带有未知参数的方程组。
步骤4:通过数学方法求解方程组,得到三个参数的近似解。
步骤5:对参数的近似解进行迭代计算,直到满足预设的误差限度。
2. 四参数坐标系转换参数求解四参数坐标系转换是在三参数的基础上增加了一个尺度参数(scale factor)。
尺度参数描述了坐标系统之间的比例差异,通常用ppm(百万分之一)表示。
其数学模型可以表示为:X_new = X_old + delta X + ppm * Y_oldY_new = Y_old + delta Y - ppm * X_oldZ_new = Z_old与三参数的求解类似,四参数的求解也需要至少三对已知的坐标点。
下面是求解四参数坐标系转换参数的步骤:步骤1:选择至少三对已知的坐标点,并在两个不同坐标系中用坐标系A 和坐标系B表示。
七参数四参数转化七参数和四参数是地图投影参数的两种主要形式。
七参数转化为四参数意味着从包含更多参数的转换模型向包含更少参数的模型转换。
下面将详细介绍七参数和四参数的概念以及它们之间的转换方法。
1.七参数转换模型:七参数是指地图投影转换过程中需要考虑的七个参数,它们分别是平移X、平移Y、平移Z、旋转角度α、β、γ和尺度因子k。
这些参数用来描述两个坐标系之间的平移、旋转和尺度变换关系。
七参数转换模型的数学表达形式为:X' = X + tx + (-rz * Y) + (ry * Z) + dxY' = Y + rz * X + (-tx * Z) + dyZ' = Z + (-ry * X) + (tx * Y) + dz其中,(X', Y', Z')为转换坐标系中的坐标,在这个坐标系中,X轴指向东方,Y轴指向北方,Z轴指向上方。
而(X, Y, Z)为原始坐标系中的坐标,原始坐标系的坐标轴方向可能与转换坐标系不一致。
tx、ty、tz 为平移参数,表示坐标系之间的平移关系。
rx、ry、rz为旋转参数,表示坐标系之间的旋转关系。
dx、dy、dz为尺度参数,表示坐标系之间的尺度变换关系。
2.四参数转换模型:四参数是指地图投影转换过程中只需考虑的四个参数,它们分别是平移dx、dy、旋转角度θ和尺度因子m。
这些参数也用于描述两个坐标系之间的平移、旋转和尺度变换关系。
四参数转换模型的数学表达形式为:X' = m * (X * cosθ - Y * sinθ) + dxY' = m * (X * sinθ + Y * cosθ) + dy其中,(X', Y')为转换坐标系中的坐标,在这个坐标系中,X轴指向东方,Y轴指向北方。
而(X, Y)为原始坐标系中的坐标,原始坐标系的坐标轴方向可能与转换坐标系不一致。
dx、dy为平移参数,表示坐标系之间的平移关系。
七参数四参数转化七参数和四参数是用来描述地球上任意两个坐标系之间的转换关系的参数模型。
七参数包括三个平移参数、三个旋转参数和一个尺度参数,而四参数则只包括三个平移参数和一个尺度参数。
七参数和四参数转化的目的是将一个坐标系中的坐标点转换到另一个坐标系中。
七参数转化可以通过四参数转化实现,只需将三个旋转参数置零即可。
而四参数转化无法通过七参数转化实现,因为缺少了旋转参数,因此只能适用于坐标系之间没有发生旋转的情况。
七参数转化的计算主要包括以下步骤:1.确定至少三个在不同坐标系下已知的控制点,记录它们在两个坐标系下的坐标。
2.根据所选的转换模型,建立转换方程组。
四参数模型的转换方程组包含三个平移参数和一个尺度参数,七参数模型的转换方程组还包含三个旋转参数。
3.根据转换方程组,利用已知控制点在两个坐标系下的坐标,求解出转换关系的参数。
四参数转化的计算相对简单,只需要进行平移和尺度的转换。
计算步骤如下:1.确定至少两个在两个坐标系下已知的控制点,记录它们在两个坐标系下的坐标。
2.假设两个坐标系之间的转换方程为:X' = s * X + dxY' = s * Y + dy其中,X和Y是原坐标系下的坐标,X'和Y'是目标坐标系下的坐标,s是尺度参数,dx和dy是平移参数。
3. 利用已知的两个控制点,可以得到两个以上的方程组,进行求解即可得到平移参数dx、dy和尺度参数s。
需要注意的是,七参数和四参数转化是近似转化,转换结果可能会有一定的误差存在。
因此,在进行坐标转化时应该尽量选择准确可靠的控制点,并使用合适的转换模型,以提高计算结果的精度。
总之,七参数和四参数转化是地理信息领域中常用的坐标转换方法,主要用于将不同坐标系下的坐标点进行转换。
通过确定关键的控制点,并利用已知的坐标点以及转换模型的方程,可以计算出转换关系的参数,实现坐标的转化。
常⽤的七参数转换法和四参数转换法以及涉及到的基本测量学知识原⽂:1.背景在了解这两种转换⽅法时,我们有必要先了解⼀些与此相关的基本知识。
我们有三种常⽤的⽅式来表⽰空间坐标,分别是:经纬度和⾼层、平⾯坐标和⾼层以及空间直⾓坐标。
2.经纬度坐标系(⼤地坐标系)这⾥我⾸先要强调:天⽂坐标表⽰的经纬度和⼤地坐标系表⽰的经纬度是不同的。
所以,同⼀个经纬度数值,在BJ54和WGS84下表⽰的是不同的位置,⽽以下我说的经纬度均指⼤地坐标系下的经纬度。
⼤地坐标系是⼤地测量中以参考椭球⾯为基准⾯建⽴起来的坐标系。
下⾯我跟⼤家⼤致谈谈其中涉及到的两个重要概念。
2.1⼤地⽔准⾯和⼤地球体地球表⾯本⾝是⼀个起伏不平、⼗分不规则的表⾯,这些⾼低不平的表⾯⽆法⽤数学公式表达,也⽆法进⾏运算,所以在量测和制图时,我们必须找⼀个规则的曲⾯来代替地球的⾃然表⾯。
当海洋静⽌时,它的⾃由⽔⾯必定与该⾯上各点的重⼒⽅向(铅垂直⽅向)成正交,我们把这个⾯叫做⽔准⾯。
但是,地球上的⽔准⾯有⽆数个,我们把其中与静⽌的平均海⽔⾯相重合的⽔准⾯设想成⼀个可以将地球进⾏包裹的闭合曲⾯,这个⽔准⾯就是⼤地⽔准⾯。
⽽被⼤地⽔准⾯包裹所形成的球体即为⼤地球体。
2.2地球椭球体由于地球体内部质量分布的不均匀,引起重⼒⽅向的变化,这个处处与重⼒⽅向成正交的⼤地⽔准⾯边成为了⼀个⼗分不规则的也不能⽤数学来表⽰的曲⾯。
不过虽然⼤地⽔准⾯的形状⼗分的不规则,但它已经是⼀个很接近于绕⾃转轴(短轴)旋转的椭球体了。
所以在测量和制图中就⽤旋转椭球来代替⼤地球体,这个旋转球体通常称地球椭球体,简称椭球体。
2.3常⽤⼤地坐标系不同坐标系,其椭球体的长半径,短半径和扁率是不同的。
⽐如我们常⽤的四种坐标系所对应的椭球体,它们的椭球体参数就各不相同:BJ54坐标系:属参⼼坐标系,长轴6378245m,短轴6356863,扁率1/298.3。
XIAN80坐标系:属参⼼坐标系,长轴6378140m,短轴6356755,扁率1/298.25722101。
坐标转换的应用浙江省地质调查院 浙江 萧山 王雪春 fidream@王解先1,2,施一民31 同济大学测量系,上海(200092)2 现代工程测量国家测绘局重点实验室,上海(200092)摘要:GPS定位技术已经被广泛应用,但由于GPS观测量是基于以地球质心为原点的空间直角坐标系,而对于采用 5 4北京坐标或者其他地方坐标而言,就需要解决如何将WGS84坐标转换为 5 4北京坐标或者其他地方坐标的转换问题。
关键词:换带计算,坐标转换,七参数,四参数,Coord前言我们在测绘,地质工作中,常常会遇到不同坐标系统间,坐标转换的问题。
目前国内常见的转换有以下3种:1,大地坐标(BLH)对平面直角坐标(XYZ)的转换;2,北京54对西安80及WGS84坐标系的相互转换;3,北京54对地方坐标的转换。
常用的方法有三参数法、四参数法和七参数法。
本文结合坐标转换软件COORD对上述三种情况和转换方法做详细的描述!1,大地坐标(BLH)对平面直角坐标(XYZ)的转换该类型的转换常用于坐标换带计算!对于这种转换应先确定转换参数,即椭球参数、分带标准(3度,6度)和中央子午线的经度。
椭球参数就是指平面直角坐标系采用什么样的椭球基准,对应有不同的长短轴及扁率。
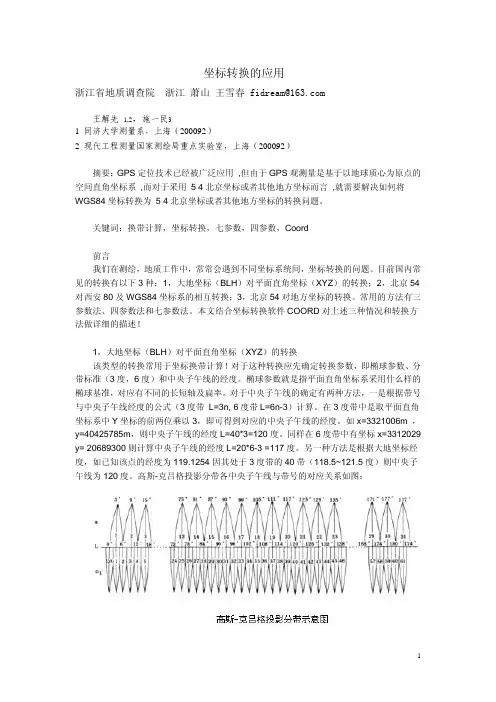
对于中央子午线的确定有两种方法,一是根据带号与中央子午线经度的公式(3度带 L=3n, 6度带L=6n-3)计算。
在3度带中是取平面直角坐标系中Y坐标的前两位乘以3,即可得到对应的中央子午线的经度。
如x=3321006m ,y=40425785m,则中央子午线的经度L=40*3=120度。
同样在6度带中有坐标x=3312029 y= 20689300则计算中央子午线的经度L=20*6-3 =117度。
另一种方法是根据大地坐标经度,如已知该点的经度为119.1254因其处于3度带的40带(118.5~121.5度)则中央子午线为120度。
高斯-克吕格投影分带各中央子午线与带号的对应关系如图:确定参数之后,可以用软件进行转换,以下以坐标转换软件COORD GM说明如何将一组6度带的XYZ坐标转化为当前坐标系统下的(BLH)及3度带的(XYZ)坐标。
坐标转换七参数和四参数哎呀,今天咱们聊聊坐标转换,七参数和四参数这些小东西。
听起来有点复杂,但其实就像做饭,配料多了也能变出美味的菜来。
先说说四参数,顾名思义,就是四个参数。
简单说,四参数主要是用来描述平面坐标系统之间的转换,简单易懂,不像那数学书里那么死板。
你可以把它想象成换了一个口味的披萨,底儿是一样的,配料换了几样,味道就完全不同了。
四参数包括平移、旋转,还有尺度变化,就像把你家附近的路换成了另一种风格,周围的建筑可能长得不一样,但你还是能找到回家的路。
再来说说七参数,这可就有点意思了。
七参数的转换主要应用在更复杂的空间里,比如说地理坐标的转换。
这可比四参数复杂多了,像是煮一锅大杂烩,里头的材料五花八门,想要和谐共处可不是那么简单。
七参数除了包含四参数的那些家伙,还加上了三个额外的角度,听上去就像是加了几道菜,整个丰盛了不少。
这几个参数帮助我们在三维空间中完成更精细的调整。
想象一下,走在大街上,看到的每一栋楼、每一条街,都是通过这些参数精确定位的。
你瞧,坐标转换就像在地图上划了一道神奇的线,帮你找到最短的路。
做坐标转换就像解一道谜题,参数越多,谜底就越复杂。
但一旦你摸清了这套规则,恭喜你,基本上就可以轻松驾驭各种坐标系统了。
就好比你掌握了几种不同的方言,随时都能和不同地方的朋友畅聊。
听起来是不是觉得有点意思?每一个参数都在默默地为你服务,像个看不见的助手,真的是太酷了。
说到这里,很多小伙伴可能会觉得这不就是数学吗?不,我想说,坐标转换其实也可以很有趣。
想象一下,咱们在地图上标记自己的位置,突然发现自己在一个新地方,心里那种既紧张又兴奋的感觉,就像打开了一扇新世界的大门。
转换坐标的过程,就像是在探索未知的旅程,虽然有时候会迷路,但每一次迷路都是一次成长的机会。
这就像人生,曲折而精彩,没错吧。
四参数和七参数之间的选择,跟你在超市挑水果似的。
想要更简单快捷的,就选四参数;要是想要更加精准复杂的,那七参数就是你的不二之选。
利用七参数进行坐标转换公式
坐标转换是指将一种坐标系中的坐标转换为另一种坐标系中的
坐标。
在测量、地图制图和地理信息系统等领域中,常常需要进行坐标转换。
常用的坐标转换方法有七参数法、四参数法和三参数法等。
七参数法是较为精确的坐标转换方法,适用于大范围、大量数据的坐标转换。
七参数法基于地球的旋转和形状变化,通过旋转角、旋转轴、比例因子和三个方向的平移量来描述坐标系之间的差异。
假设已知两种坐标系的某一点的坐标(X,Y,Z),且已知它们之间的七参数,可以通过以下公式进行坐标转换:
X1 = s*(X - Z*y + Y*z) + Tx
Y1 = s*(Y + Z*x - X*z) + Ty
Z1 = s*(Z - Y*x + X*y) + Tz
其中,s为比例因子,Tx、Ty、Tz分别为三个方向的平移量,x、y、z为旋转轴的方向余弦值。
需要注意的是,七参数法所描述的坐标系之间的差异是三维的,因此在进行坐标转换时,需要考虑高程的变化。
如果只需要进行水平坐标的转换,可以采用四参数法或三参数法。
总之,选择合适的坐标转换方法和参数,可以提高坐标转换的精度和效率,为地理空间信息的采集、存储和处理提供基础支撑。
- 1 -。
坐标转换之计算公式一、参心大地坐标与参心空间直角坐标转换1名词解释:A :参心空间直角坐标系:a) 以参心0为坐标原点;b) Z 轴与参考椭球的短轴(旋转轴)相重合;c) X 轴与起始子午面和赤道的交线重合;d) Y 轴在赤道面上与X 轴垂直,构成右手直角坐标系0-XYZ ;e) 地面点P 的点位用(X ,Y ,Z )表示;B :参心大地坐标系:a) 以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合;b) 大地纬度B :以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B ;c) 大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L ;d) 大地高H :地面点沿椭球法线至椭球面的距离为大地高H ;e) 地面点的点位用(B ,L ,H )表示。
2 参心大地坐标转换为参心空间直角坐标:⎪⎭⎪⎬⎫+-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2公式中,N 为椭球面卯酉圈的曲率半径,e 为椭球的第一偏心率,a 、b 椭球的长短半径,f 椭球扁率,W 为第一辅助系数ab a e 22-= 或 f f e 1*2-= W a N BW e =-=22sin *1(3 参心空间直角坐标转换参心大地坐标[]N BY X H H e N Y X H N Z B XY L -+=+-++==cos ))1(**)()(*arctan()arctan(22222 二 高斯投影及高斯直角坐标系1、高斯投影概述高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关,与方向无关;3. 离中央子午线越远变形越大为控制投影后的长度变形,采用分带投影的方法。
常用3度带或6度带分带,城市或工程控制网坐标可采用不按3度带中央子午线的任意带。
2、高斯投影正算公式:522242532236425442232)5814185(cos 120)1(cos 6cos )5861(cos sin 720 495(cos sin 24cos sin 2l t t t B N l t B N Bl N y l t t B B N l t B B N Bl B N X x ηηηηη-++-++-+=+-+++-++=)3、高斯投影反算公式:()()()⎥⎥⎦⎤⎪⎪⎭⎫ ⎝⎛+++⎪⎪⎭⎫ ⎝⎛⎢⎣⎡-++-⎪⎪⎭⎫ ⎝⎛-=⎥⎥⎥⎥⎦⎤⎪⎪⎭⎫ ⎝⎛+++++⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛++-⎪⎪⎭⎫ ⎝⎛=442222224222422224590613601 9351211286242851201 )21(611cos 1f f f f f f f f f f f f f f f f f f f f f f f N y t t N y t t N y y M t B B N y t t t N y t N y B l ηηηηη四参数模型:。
七参数四参数转化七参数和四参数转化是在大地测量中常用的两种经纬度转换方法,用于将不同坐标参考系下的坐标相互转换。
下面将详细介绍七参数和四参数转化的原理和应用。
1.七参数转化七参数转化是一种常用的大地测量中的坐标转换方法,其基本原理是通过七个参数来描述两个坐标参考系的空间相对关系。
这七个参数包括三个平移参数(dx, dy, dz),三个旋转参数(rx, ry, rz),以及一个尺度因子(s)。
假设我们有一个已知坐标参考系A,以及一个需要转换到的目标坐标参考系B,我们可以通过测量的方式获得A到B之间的七个参数,并利用这些参数将A坐标系下的点转换到B坐标系下的点。
七参数转化的公式如下:Xb = s(Rx * Xa - Ry * Za + Rz * Ya) + dxYb = s(Ry * Xa + Rx * Za - Rz * Xa) + dyZb = s(Rz * Xa + Rx * Ya + Ry * Xa) + dz其中(Xa,Ya,Za)是坐标参考系A中的点的坐标,(Xb,Yb,Zb)是坐标参考系B中的点的坐标。
七参数转化广泛应用于地理信息系统(GIS)、大地测量、导航等领域。
通过七参数转化,可以将不同坐标系统下的点转换到同一坐标系统下,实现数据融合和统一管理。
四参数转化是七参数转化的一种特殊情况,即在七参数转化中忽略了旋转和尺度因子的影响。
四参数转化只考虑了平移因子,即通过三个平移参数(dx, dy, dz)来描述两个坐标参考系的空间相对关系。
四参数转化的公式如下:Xb = Xa + dxYb = Ya + dyZb = Za + dz其中(Xa,Ya,Za)是坐标参考系A中的点的坐标,(Xb,Yb,Zb)是坐标参考系B中的点的坐标。
四参数转化通常应用于简单的坐标系转换,适用于小区域的坐标变换问题。
总结:七参数和四参数转化是大地测量中常用的坐标转换方法,用于将不同坐标参考系下的点的空间位置相互转换。
七参数四参数的坐标转换与应用坐标转换是指将一个坐标系下的坐标转换为另一个坐标系下的坐标。
在地理信息系统(GIS)和测绘工程中,常用的坐标转换方法有七参数和四参数。
七参数坐标转换是指将一个坐标系的三维坐标(X、Y和Z)通过七个参数转换为另一个坐标系的三维坐标。
这七个参数分别是平移参数(ΔX,ΔY,ΔZ)、三个旋转参数(α,β,γ)和刻度因子(k)。
平移参数表示两个坐标系之间的平面位移,旋转参数表示两个坐标系之间的旋转角度,刻度因子表示两个坐标系之间的尺度差异。
四参数坐标转换是指将一个二维平面坐标(X和Y)通过四个参数转换为另一个二维平面坐标。
这四个参数分别是平移参数(ΔX,ΔY)、旋转参数(θ)和刻度因子(k)。
与七参数不同,四参数只考虑了平面的平移、旋转和尺度变换,而没有考虑高程的变换。
七参数和四参数坐标转换可以应用于许多领域。
在测绘工程中,坐标转换可以将原始观测数据转换为标准坐标系下的坐标,从而实现数据的一致性和比对。
在地理信息系统中,坐标转换可以将不同坐标系下的地理数据进行叠加分析,实现数据的整合和可视化。
此外,坐标转换还可以用于导航和定位系统,将不同坐标系下的位置坐标转换为标准地理坐标,实现位置的准确定位。
七参数和四参数坐标转换的实现通常需要借助于配准控制点。
配准控制点是指在两个坐标系中都可以测量得到的地物点,其坐标可以作为转换参数的计算依据。
通过测量一组配准控制点的坐标,并在两个坐标系中确定它们的对应关系,可以计算出七个或四个参数的数值。
然而,坐标转换可能存在一定的误差。
这是由于地球的形状、椭球体模型、大地水准面等因素的复杂性所决定的。
因此,在进行坐标转换时,需要考虑误差的传递和累积,并采取相应的精度控制措施。
总之,七参数和四参数的坐标转换是地理信息系统和测绘工程中的常用技术,可以实现不同坐标系下的坐标数据的转换和使用。
通过准确的坐标转换,可以实现不同坐标系下的数据的一致性和比对,为应用提供准确的位置信息和空间分析基础。
一、引言在地图制图、地理信息系统、导航定位等领域,常常需要进行不同坐标系之间的转换,以实现不同数据之间的对接和整合。
而在坐标系转换中,三参数、四参数、七参数等方法是常用的参数化转换模型。
本文将从理论和实践两个层面,对这些坐标系转换参数的求解进行探讨。
二、三参数坐标系转换参数求解三参数坐标系转换是指通过平移、旋转和尺度变换来实现两个坐标系之间的转换。
求解三参数的过程可以分为以下几个步骤:1. 收集数据:首先需要获取两个坐标系之间的对应点对,这些点对可以是地面控制点、地理标志物等。
2. 建立转换模型:利用对应点对,建立三参数转换模型,通常表示为:ΔX = ΔX0 + aΔX1 - bΔY1ΔY = ΔY0 + bΔX1 + aΔY1ΔZ = ΔZ0 + c(ΔX + ΔY)3. 求解参数:通过最小二乘法等数学方法,求解出a、b、c三个参数的值,从而得到三参数转换模型。
4. 参数验证:对求解出的参数进行验证和调整,以确保转换模型的精度和稳定性。
三、四参数坐标系转换参数求解四参数坐标系转换相比于三参数,增加了一个尺度参数,其求解过程类似于三参数,不同之处在于模型的建立和参数的求解方式:1. 模型建立:四参数转换模型可以表示为:ΔX = ΔX0 + aΔX1 - bΔY1 + mΔZ1ΔY = ΔY0 + bΔX1 + aΔY1 + nΔZ1ΔZ = ΔZ0 + c(ΔX + ΔY)2. 参数求解:通过对应点对,利用最小二乘法等数学方法,求解出a、b、c和m、n四个参数的值。
3. 参数验证:同样需要对求解出的四个参数进行验证和调整,保证转换模型的准确性和可靠性。
四、七参数坐标系转换参数求解七参数坐标系转换是在四参数的基础上,增加了三个旋转参数,其求解过程相对复杂,主要包括以下步骤:1. 建立转换模型:七参数转换模型可以表示为:ΔX = ΔX0 + (1 + l)ΔX1 - mΔY1 + nΔZ1 + TxΔY = ΔY0 + mΔX1 + (1 + l)ΔY1 - nΔZ1 + TyΔZ = ΔZ0 - nΔX1 + mΔY1 + (1 + l)ΔZ1 + Tz2. 参数求解:通过对应点对,运用复杂的数学方法,求解出l、m、n和Tx、Ty、Tz六个参数的值。
测绘里面的四参数和七参数原理测绘是指以测量为基础,利用现代科学技术手段,对地球表面的地貌、地壳变动、地理位置、建筑物等进行测量、绘制、分析和管理的工作。
在测绘领域,常常需要通过对地球表面位置关系的变换和转换进行精确的计算和模型建立。
这就涉及到了四参数和七参数原理。
四参数原理是指平面直角坐标系变换时所需考虑的平移(TX、TY)、旋转(θ)和比例(K)四个参数。
当需要将一个坐标系中的数据转换到另一个坐标系中时,四参数原理可以有效地模拟和计算坐标系之间的变换。
这种变换通常发生在不同的测量任务中,或者不同的国家或地区使用的坐标系存在差异时。
假设有一个基准坐标系A和一个待转换的坐标系B,两者之间的差异可以用四个参数来表示。
平移参数(Tx、Ty)用来表示坐标系B相对于坐标系A在水平和垂直方向上的平移量;旋转参数(θ)用来表示坐标系B相对于坐标系A的旋转角度;比例因子(K)用来表示坐标系B相对于坐标系A的尺度变换。
通过这四个参数的计算和转换,可以将坐标系B的数据转换到坐标系A中。
七参数原理是在四参数的基础上引入了三个地壳形变参数,用来描述大地的形变和变形场。
除了平移、旋转和比例因子外,七参数还考虑了地壳动力学的影响。
这些参数是:高程差(TZ)、地壳伸长率(M)、地轴偏移(DX)、地球自转速率变化(DY)和椭球面参数改变(DZ)。
七参数原理主要应用于大规模的地质测量和地球动力学研究中。
这些问题通常涉及到较长的时间跨度和地理空间范围,需要考虑地球表面的长期形变和变形。
七参数原理可以更准确地描述地壳形变的变化和动力学过程,为地球科学研究和应用提供有效的数据基础。
总结起来,四参数和七参数原理是测绘中用于坐标系变换和地壳形变分析的重要原理和方法。
四参数主要考虑了平移、旋转和比例变换,适用于一般的坐标系转换;而七参数除了这些基本变换参数外,还考虑了地球形变的影响,适用于较大范围和长时间跨度的测绘和地质测量。
这些原理和方法的应用,推动了测绘技术的发展和测绘数据的精度提升,为地理信息系统、地图制图、地质研究等领域提供了重要支持。
四参数法和七参数法坐标转换的比较_宫文学四参数法是一种简化的坐标转换方法,它假设了坐标系之间的平移关系。
四参数法的转换公式为X'=X+DXY'=Y+DY其中,(X',Y')是目标坐标系中的坐标,(X,Y)是原始坐标系中的坐标,(DX,DY)是平移参数。
四参数法适用于只有平移变化的坐标系转换,例如在局部区域内进行地理测量时,由于尺度变化较小,只考虑平移关系可以近似得到较好的结果。
七参数法是一种更为综合的坐标转换方法,它考虑了坐标系之间的平移、旋转和尺度变化关系。
七参数法的转换公式为X' = X * s - Y * rz + Z * ry + DXY' = X * rz + Y * s - Z * rx + DYZ' = -X * ry + Y * rx + Z * s + DZ其中,(X', Y', Z')是目标坐标系中的坐标,(X, Y, Z)是原始坐标系中的坐标,(DX, DY, DZ)是平移参数,(rx, ry, rz)是旋转参数,s是尺度参数。
七参数法适用于大范围的地理测量,可以更准确地考虑到平移、旋转和尺度变化等因素。
在实际应用中,我们需要根据具体的需求选择合适的坐标转换方法。
如果只需要进行简单的平移变换,四参数法是一个较好的选择。
如果需要考虑到旋转和尺度变化等因素,七参数法更为适用。
同时,我们还需要考虑到数据的准确性和精度需求,以选择合适的坐标转换方法。
总的来说,四参数法和七参数法是常用的地理坐标转换方法,在不同的应用场景中各有优劣。
选择合适的转换方法需要综合考虑测量范围、精度要求和计算效率等因素,以得到最准确、最适用的转换结果。
坐标转换之计算公式+7 参+四参模型坐标转换之计算公式、参心大地坐标与参心空间直角坐标转换1名词解释:A :参心空间直角坐标系:a)以参心0为坐标原点;b)Z轴与参考椭球的短轴(旋转轴)相重合;c)X轴与起始子午面和赤道的交线重合;d)丫轴在赤道面上与X轴垂直,构成右手直角坐标系 0-XYZ ;e)地面点P的点位用(X,丫,Z)表示;B:参心大地坐标系:a)以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合;b)大地纬度B:以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B;c)大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L ;d)大地高H :地面点沿椭球法线至椭球面的距离为大地高H ;e)地面点的点位用(B,L,H)表示。
2参心大地坐标转换为参心空间直角坐标:X (N H)*cosB*cosLY (N H )* cosB* sinL2Z [N * (1 e ) H]*sinB公式中,N为椭球面卯酉圈的曲率半径,e为椭球的第一偏心率,a、b椭球的长短半径,f椭球扁率,W为第一辅助系数三或e Qa f(1 g * sin2BaW3参心空间直角坐标转换参心大地坐标arcta narcta n&.(X2Y2)* N*(1X2Y2NcosB咼斯投影及咼斯直角坐标系1、高斯投影概述高斯-克吕格投影的条件:1.是正形投影;2.中央子午线不变形高斯投影的性质:1.投影后角度不变;2.长度比与点位有关,与方向无为控制投影后的长度变形,采用分带投影的方法。
常用 3度带或6度带分带,城市或工程控制网坐标可采用不按 3度带中央子午线的任意带2、高斯投影正算公式:Z*(N H)e2) H)关; 3. 离中央子午线越远变形越大N2N3 2X sin B cos Blsin Bcos B(5 t4N5sinBcos B(61 58t 72 03、高斯投影反算公式:1 _ y . 2t 222) y f 丿 N f cosB f N f '6V ,15 28t 224t 46 28篙y 120N f利 vrm — <rr 土何、扌:HK/y rn ru^TTij ME Jr 土 MJ n n TFI u - Mf r zr m亀7参数的数学模里是,d )式中上局Qh'AA 为3个平移参数心心心 为3个 旋转参数”rn %尺度变化参数,共计了牛转换参数刁为求得这7个转换参数•至少需要3个公共点,当多于:!个公共■点时•可按 最小二乘法求得7个参数的眾或鄭道,2. 2.2 7参数的求鯉N cos Bl N 3 2石cos B(112)|3N 5cos 120B(5 18t 「t 1422 2558t )l4 4)t 4)l 6fy 丄2M f N f 12 3t 22t22_y_ N f1360 61 90t 245t 4N f四参数模型:粋幕『餘番師条卜的牢标转理到他万半你条,阻卿国砧—标输尺基淮站作苗基>1以下转换儿:疋平移常数岭:F平移常数Scdk(K);尺度比Row«(«)【族转角其数学令聲如卜:pV* = [A o-rain(n)]JC"、[片+ (后g(门-打n(F))]A (门(I)式中,戈』为投影后的貢角坐标t x\r为变换后的地方坐标集中的坐标。
坐标转换之计算公式
一、参心大地坐标与参心空间直角坐标转换
1名词解释:
A :参心空间直角坐标系:
a) 以参心0为坐标原点;
b) Z 轴与参考椭球的短轴(旋转轴)相重合;
c) X 轴与起始子午面和赤道的交线重合;
d) Y 轴在赤道面上与X 轴垂直,构成右手直角坐标系0-XYZ ;
e) 地面点P 的点位用(X ,Y ,Z )表示;
B :参心大地坐标系:
a) 以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合;
b) 大地纬度B :以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B ;
c) 大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L ;
d) 大地高H :地面点沿椭球法线至椭球面的距离为大地高H ;
e) 地面点的点位用(B ,L ,H )表示。
2 参心大地坐标转换为参心空间直角坐标:
⎪⎭
⎪⎬⎫+-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2
公式中,N 为椭球面卯酉圈的曲率半径,e 为椭球的第一偏心率,a 、b 椭球的长短半
径,f 椭球扁率,W 为第一辅助系数
a
b a e 2
2-= 或 f f e 1*2-= W a N B
W e =-=22sin *1(
3 参心空间直角坐标转换参心大地坐标
[
]N B
Y X H H e N Y X H N Z B X
Y L -+=+-++==cos ))1(**)()(*arctan(
)arctan(2
2222 二 高斯投影及高斯直角坐标系 1、高斯投影概述 高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形
高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关,与方向无关;
3. 离中央子午线越远变形越大
为控制投影后的长度变形,采用分带投影的方法。
常用3度带或6度带分带,城市或工
程控制网坐标可采用不按3度带中央子午线的任意带。
2、高斯投影正算公式:
5
2224253
2236
4254
42232)5814185(cos 120
)1(cos 6
cos )5861(cos sin 720 495(cos sin 24
cos sin 2l t t t B N l t B N Bl N y l t t B B N l t B B N Bl B N X x ηηηηη-++-++-+=+-+++-++=) 3、高斯投影反算公式:
()(
)()
⎥⎥⎦⎤⎪⎪⎭⎫ ⎝⎛+++⎪⎪⎭⎫ ⎝⎛⎢⎣⎡-++-⎪⎪⎭⎫ ⎝⎛-=⎥⎥⎥⎥⎦⎤⎪⎪⎭⎫ ⎝⎛+++++⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛++-⎪⎪⎭⎫ ⎝⎛=4422
22224222422
224590613601 9351211286242851201 )21(611cos 1f f f f
f f f f f f f f f
f f f f f f f f f f N y t t N y t t N y y M t B B N y t t t N y t N y B l ηηηηη
四参数模型:。