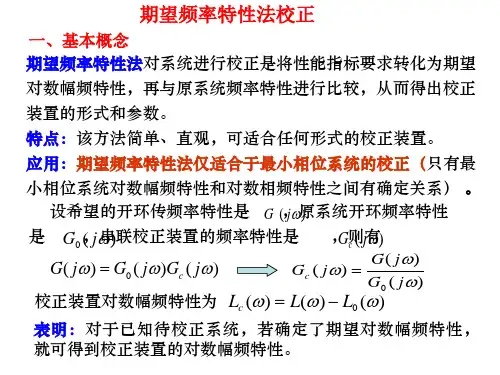
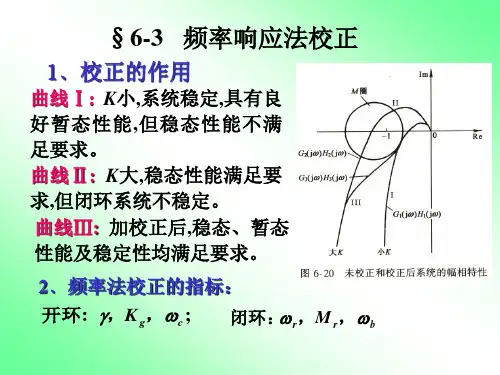
频率法校正
- 格式:doc
- 大小:435.00 KB
- 文档页数:9



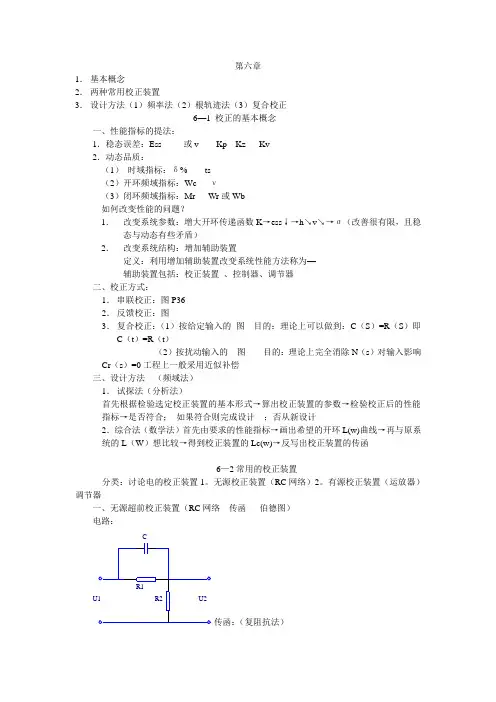
第六章1. 基本概念2. 两种常用校正装置3. 设计方法(1)频率法(2)根轨迹法(3)复合校正 6—1 校正的基本概念一、性能指标的提法:1.稳态误差:Ess 或v Kp Kz Kv 2.动态品质:(1) 时域指标:δ% ts (2)开环频域指标:Wc ν(3)闭环频域指标:Mr Wr 或Wb 如何改变性能的问题?1. 改变系统参数:增大开环传递函数K →ess ↓→h ↘v ↘→σ(改善很有限,且稳态与动态有些矛盾)2. 改变系统结构:增加辅助装置定义:利用增加辅助装置改变系统性能方法称为— 辅助装置包括:校正装置 、控制器、调节器二、校正方式:1. 串联校正:图P36 2. 反馈校正:图 3. 复合校正:(1)按给定输入的 图 目的:理论上可以做到:C (S )=R (S )即C (t )=R (t )(2)按扰动输入的 图 目的:理论上完全消除N (s )对输入影响Cr (s )=0工程上一般采用近似补偿 三、设计方法 (频域法) 1. 试探法(分析法)首先根据检验选定校正装置的基本形式→算出校正装置的参数→检验校正后的性能指标→是否符合; 如果符合则完成设计 ;否从新设计2.综合法(数学法)首先由要求的性能指标→画出希望的开环L(w)曲线→再与原系统的L (W )想比较→得到校正装置的Lc(w)→反写出校正装置的传函6—2常用的校正装置分类:讨论电的校正装置1。
无源校正装置(RC 网络)2。
有源校正装置(运放器)调节器一、无源超前校正装置(RC 网络 传函 伯德图) 电路:U2U1CR2R1传函:(复阻抗法)Gc(s)=1+Tas/a(1+Ts) a 衰减系数 T 时间常数必须补偿a 的衰减:把原K 增加a 倍或再串一个放大器(a 倍) 补偿后:aGc(s)=1+TaS/1+TS (a>1) 二、无源迟后校正装置 电路;6—3一、超前校正问题的提出 例:系统如图所示,要求1. 在单位斜坡输入下稳态误差ess<0.1;2. 开环剪切频率3. 相角裕度 幅值裕度问是否需要校正,怎样校正?解:首先进行稳态计算K=10可以满足稳态误差要求。

根轨迹法和频率响应法校正根轨迹法和频率响应法是两种常用的控制系统校正方法。
这篇文章将围绕这两种方法进行阐述。
首先,我们来介绍根轨迹法。
根轨迹法是一种基于根轨迹的控制系统校正方法。
它通过绘制开环传递函数的根轨迹图来设计合适的控制器。
开环传递函数是未加上控制器后的传递函数,根轨迹图则反映了系统闭环极点的变化情况。
根据根轨迹图,我们可以确定控制器的增益和相位来实现系统的稳定和响应速度的要求。
接下来,让我们介绍频率响应法。
频率响应法是一种基于系统的频率响应特性来设计控制器的方法。
它通常使用幅频特性曲线和相频特性曲线来描述系统的频率响应特性。
在幅频特性曲线上,我们可以看到系统对不同频率输入的响应幅值,从而可以根据需求来设计合适的增益。
而在相频特性曲线上,我们可以看到系统对不同频率输入的相位差,从而可以根据需求来设计合适的相位。
以上是根轨迹法和频率响应法的简要介绍。
接下来,让我们来分析它们的优缺点和适用场景。
首先,根轨迹法适用于线性系统和单输入单输出变量的情况。
这种方法可以提供极点位置信息,而且具有直观性和易于理解的特点。
缺点是需要在整个频率范围内进行分析并找到关键频率点,需要较高的数学功底和计算能力。
其次,频率响应法适用于多变量系统和非线性系统的情况。
这种方法可以提供系统的幅度和相位特性,而且可以在局部频率范围内进行分析。
缺点是对系统的稳态误差和非线性特性无法进行考虑,需要对系统进行模型化。
在实际应用中,我们可以根据系统的特性来选择合适的方法。
如果系统较为简单且线性,可以选择根轨迹法;如果系统较为复杂或存在非线性特性,可以选择频率响应法。
当然,也可以将两种方法结合使用,以获取更好的校正效果。
总之,根轨迹法和频率响应法是两种常用的控制系统校正方法。
了解它们的优缺点和适用场景有助于我们在实际应用中做出合适的决策。
晶振振荡频率校正方法
1.调整电容分量:校准晶振频率的一种简单方法是通过调整
电容分量来实现。
晶振通常由一个谐振回路组成,包括晶体、
电感和电容。
通过增加或减少电容的值,可以改变晶振的频率。
可以通过更换电容或添加并联或串联电容来实现频率校正。
2.调整晶体附近的电路:晶振频率还可以通过调整晶体附近
的电路来进行校正。
晶振周围的电路包括负载电容、终端电阻、滤波电路等。
通过调整这些电路的参数,可以对晶振的频率进
行微调。
3.温度补偿:晶振频率会受到温度的影响,因此温度补偿也
是一种常见的频率校正方法。
通过在晶振电路中添加温度传感器,并根据温度变化对晶振频率进行自动校正,可以提高晶振
的稳定性和准确性。
4.预调电路:预调电路是一种通过调整晶振电路中的电路参
数来实现频率校正的方法。
该电路会对晶振的频率进行粗略调整,通过监测晶振输出的频率,再进行微调,以达到所需的频率。
5.软件校正:对于一些数字电路,可以通过在程序中进行软
件校正来调整晶振频率。
通过微调时钟的频率和相位,可以达
到对晶振频率进行校正的目的。
《自动控制原理》仿真实验报告
学年学期: 2014-2015学年第1学期
实验内容:频率法校正
姓名:王建宙
班级: 12电4 指导教师:田晴
分数:
一.实验目的:
1. 学习结构图编程,掌握结构图simulink 文件的设计方法;
2. 对给定的控制系统,设计满足频域性能指标的校正环节,并通过仿真结果验证设计的准确性。
二.实验内容
内容1:
已知单位反馈系统,开环传递函数 10(s)(0.2s 1)(0.5s 1)
o G s =++ 1. 对给定系统,建立m 文件,确定其伯德图以及相位裕量、穿越频率,闭环系统单位阶跃响应。
2. 要求串联校正后,相位裕量()45c γω>o ,增益裕量6dB GM ≥,设计串联校正环节(分别采用超前、滞后两种方法)
3. 在上述m 文件,编写控制器程序。
将控制器、校正后系统伯德图与原系统伯德图绘制在同一figure 中。
校正后系统与原系统阶跃响应绘制在同一figure 中。
4. 在SIMULINK 环境下,搭建系统的结构框图,进行原系统与校正后系统的阶跃响应仿真
1)问题分析:
本设计中选取滞后校正方法,其原理是观察原系统在穿越频率附近相位迅速衰减,适合采取滞后校正的方法。
所谓滞后校正,就是通过采取适当的滞后校正装置,降低穿越频率w ,使相位裕量提高。
不过降低穿越频率会造成暂态响应时间增大。
2)问题解决:
问题一:
用MATLAB 建立校正前系统的开环传递函数,确定其相位裕量、穿越频率,伯德图,和闭环系统单位阶跃响应。
程序及说明如下:
num=10; %系统K 取10
den=conv([0.5 1],conv([0.2 1],[1 0]));
G=tf(num,den);
[gm,pm,wcg,wcp]=margin(G);
disp(['相位裕量=',num2str(pm)]) %校正前系统相位裕量
disp(['穿越频率=',num2str(wcp)]) %校正前系统穿越频率
disp(['增益裕量=',num2str(gm)]) %校正前系统增益裕量
sys=feedback(G,1); % 校正前系统闭环传函
margin(G) %校正前系统bode 图
step(sys) %校正前系统阶跃响应图
grid on
运行结果:
相位裕量=-8.8865
穿越频率=3.7565
增益裕量=0.7
可见原系统相位裕量小于零,是不稳定的,且增益裕量=0.7。
其bode图见下图一
图一校正前系统bode图
其阶跃响应图见下图二
图二校正前系统阶跃响应
问题二:
设计滞后校正网络,程序及说明如下
syms a %定义变量a
w=vpa(solve(deg2rad(90)-atan(0.2*a)-atan(0.5*a)==deg2rad(53),a)); %确定校正后的w根据相位裕量要求在增加8°,相位裕量取53
h=20*log10(10/w); %计算出原系统在w处的幅值h
gama=10^(h/20); %确定gama
w2=w/6; %确定w2,w1,T取6
w1=w2/gama;
Wc=tf([1/double(w2) 1],[1/double(w1) 1]); %校正装置传递函数
Wk=Wc*G; %校正后系统传递函数
[gm,pm,wcg,wcp]=margin(Wk);
disp(['校正后系统相位裕量=',num2str(pm)]) %校正后系统相位裕量disp(['校正后系统穿越频率=',num2str(wcp)]) %校正后系统穿越频率disp(['校正后系统增益裕量=',num2str(gm)]) %校正后系统增益裕量
sys2=feedback(Wk,1); %校正后系统闭环传函程序运行结果:
校正后系统相位裕量=46.5821
校正后系统穿越频率=0.89057
校正后系统增益裕量=6.4443
可见本设计满足相位裕量
()45
c
γω>o,增益裕量6dB
GM≥的要求
问题三:
%画图
figure('name','原系统伯德图') %两个图片可以共用同一个坐标系,故可以用hold on 建立同一坐标下
margin(G) %校正前系统bode图
hold on
margin(Wk) %校正后系统bode图
hold off
grid on %显示网格线
figure('name','闭环系统单位阶跃响应')
step(sys,sys2,[0:0.2:10])
grid on
校正后系统伯德图与原系统伯德图见下图三,校正后系统与原系统阶跃响应见下图四
图四校正前后系统伯德图
图五校正前后系统阶跃响应
结果分析:
校正前校正后暂态峰值时间发散震荡约3.86s 相位裕量-8.8865 46.5821
增益裕量0.7 6.4443
穿越频率 3.7565 0.89057
满足题中要求。
这正是滞后校正的特点,通过穿越频率减小来增大相位裕量。
通过滞后控制器,相位裕量、增益裕量增大,系统由不稳定变为稳定。
问题四:
建立题中MATLAB的simulink仿真采用MUX模块可以使两个系统中的波形在同一示波器中显示,见下图六
图六simulink仿真
校正前后系统阶跃响应显示结果见下图七
图七校正前后系统阶跃响应
在响应曲线上可读出校正后系统输出峰值为x cm=1.25,超调量为25% 调节时间ts(5%)=5.5s。
内容2:
已知对象模型为
2
3 (s)
(s1)
s o
e
G
-
=
+
1.搭建SIMULINK仿真模型,进行单位反馈系统的阶跃响应仿真。
2.设计PID控制器,在SIMULINK环境下,自行搭建,建立子系统,封装。
3.将设计好的PID控制器串联到原系统中,调节PID参数,得到控制系统的良
好性能。
建立SIMULINK仿真模型见下图八
图八SIMULINK仿真模型
通过放大环节,积分环节,微分环节组成PID控制器,见下图九
图九PID控制器组成
用PID控制器前后显示结果见下图十
图十PID控制器显示结果
当取K=1,Td=1,Ti=0时,有上图所示结果,各指标如下表二
原系统PID控制器后峰值0.568 0.542 峰值时间 5.2s 3.2s
调节时间10s 8s
经过对PID的调节可明白:
在PID调节作用下,对误差信号分别进行比例、积分、微分运算,三个作用量之和作为控制信号输出给被控对象。
PID控制是通过三个参量K、Ti、Td起作用的。
这三个参量取值的大小不同,就是比例、积分、微分作用的强弱变化。
经过适当调节,可以使原系统获得较好的改正。