液压支架同步升降系统设计
- 格式:doc
- 大小:28.00 KB
- 文档页数:7

液压支架液压系统设计1. 引言液压支架是一种常见的起重设备,采用液压系统作为动力来源,实现起重、下降和平衡等功能。
本文将介绍液压支架液压系统的设计。
2. 液压系统的工作原理液压支架液压系统由液压油箱、液压泵、液压缸、液压阀和控制系统等组成。
其工作原理如下:1.液压油箱:储存液压油,并通过滤油器保证液压油的清洁。
2.液压泵:将液压油从油箱中抽取出来,并提供所需的压力。
3.液压缸:接受由液压泵提供的液压力,产生线性位移或力。
4.液压阀:通过控制液压油的流通,实现液压系统的各种功能。
5.控制系统:根据需要,控制液压阀的开关,从而控制液压缸的运动。
3. 液压系统的设计要点在设计液压支架液压系统时,需要考虑以下几个要点:3.1. 压力需求液压系统根据使用场景的需要,确定所需的最大工作压力。
根据工作压力来选择液压泵和液压缸的类型和规格。
3.2. 流量需求根据液压系统所需的最大流量来确定液压泵的流量大小。
同时,也需要考虑液压管路的直径和长度,以保证流量传输的顺畅。
3.3. 控制方式液压支架液压系统可以采用手动控制或自动控制方式。
手动控制需要人工操作控制阀,而自动控制可以通过传感器和控制器实现。
3.4. 安全考虑在设计液压系统时,需要考虑安全因素,例如应采用双重液压回路设计,避免单点故障导致系统失效;选择具有过载保护功能的液压阀,以保护系统和操作人员的安全。
4. 液压系统的组成部分液压支架液压系统由以下几个组成部分构成:4.1. 液压油箱液压油箱用于储存液压油,具有适当的容量和良好的密封性能。
油箱上还需设置油面高度计和油温计等监测装置,方便操作人员了解液压系统的工作状态。
4.2. 液压泵液压泵负责将液压油从油箱中抽取出来,并提供所需的压力。
常见的液压泵有齿轮泵、叶片泵和柱塞泵等,选择时需考虑流量、压力和效率等因素。
4.3. 液压缸液压缸接受液压泵提供的液压力,产生线性位移或力。
液压缸的规格取决于所需的工作压力、位移和力大小。
本论文要紧论述了一样掩护式液压支架的设计进程。
设计内容包括:选架型、整体设计、要紧零部件的设计、要紧零部件的校核和液压系统的设计。
支架采纳正四连杆机构,以改善支架受力状况。
顶梁、掩护梁均做成箱体结构;立柱采纳双伸缩作用液压缸,以增加工作行程来知足支架调高范围的需要。
推移千斤顶采纳框架结构,以减少推溜力和增大移架力。
为了提高移架速度,确保对顶板的及时支护,采纳锥阀液压系统。
The article mainly elaborated the general shield type hydraulic pressure support design process. The design content includes: Chooses, the system design, the main spare part design, the main spare part examination and the hydraulic system design.The support uses the four link motion gear, improves the support stress condition. The top-beam, caving shield, the foundation makes the packed in a box body structure; The column uses the double expansion and contraction function hydraulic cylinder, increases the power stroke to satisfy the support to adjust the high scope the need. Passes the hoisting jack to use the portal frame construction, reduces pushes slides the strength and increases moves a strength. In order to enhance moves a speed, guarantees is prompt to the roof support, uses the mushroom valve hydraulic system.目录1概述 (4)液压支架的组成和分类 (4)液压支架的工作原理 (7)支架选型的大体参数 (8)2整体设计 (10)液压支架大体参数的确信 (10)四连杆机构设计 (12)立柱及柱窝位置的确信 (14)平稳千斤顶位置的确信 (33)其它千斤顶位置的确信 (36)3支架的受力计算 (39)液压支架受力分析 (39)确信支架的支护强度 (40)底座接触比压计算 (40)支架支护效率 (40)4液压支架的要紧部件的设计 (42)前梁 (43)主顶梁 (43)掩护梁 (44)前、后连杆 (45)底座 (45)立柱 (46)千斤顶 (47)5要紧零、部件的强度校核 (49)校核的大体要求 (49)前梁的校核 (50)主顶梁的校核 (52)掩护梁的强度校核 (55)底座强度校核 (57)销轴和耳座的强度校核 (59)立柱强度校核 (62)6液压系统设计 (68)液压支架的液压系统的简介 (68)液压支架的液压系统拟订 (69)液压元件的选取 (71)液压操纵系统 (72)终止语 (76)参考文献 (77)1 概述液压支架的组成和分类、液压支架的组成液压支架的种类很多,但其大体功能是相同的。
液压升降机的设计液压升降机是一种常用的升降设备,广泛应用于工业和商业领域中。
液压升降机通过液压系统来传递力量,实现物体的升降。
它具有结构简单、运行平稳、安全可靠等特点,因此在许多场合中被广泛使用。
下面将详细介绍液压升降机的设计。
一、结构设计液压升降机的结构设计是整个升降机设计的基础。
结构设计需要考虑到升降机的使用条件和要求,以及物体的重量和规模。
一般来说,液压升降机由底座、液压缸、平台等部分组成。
底座是升降机的支撑结构,需要具备足够的强度和稳定性。
液压缸是升降机的核心部件,通过液压油来提供动力,驱动平台升降。
平台是升降物体的支撑部分,需要具备足够的承载能力和稳定性。
二、液压系统设计液压系统设计是液压升降机设计的关键部分。
液压系统包括液压油箱、液压泵、液压缸、控制阀等组成部分。
液压油箱存放液压油,提供液压系统所需的液压油量。
液压泵负责将液压油从油箱中吸入,然后通过压力生成器提供高压力的液体。
液压缸将压力液推动,实现升降机的动力。
控制阀用于控制液压油的流动方向和流量,实现升降机的升降和停止。
三、安全系统设计液压升降机的安全系统设计是保证升降机安全可靠运行的关键。
安全系统一般包括液压防爆阀、液压缓冲器、液压启动器等。
液压防爆阀用于防止液压系统失控时产生冲击和液压泄漏。
液压缓冲器用于控制升降机的运行速度,防止运行过程中产生冲击力。
液压启动器用于控制液压油的流动,实现升降机的启动和停止。
四、电气系统设计液压升降机的电气系统设计是液压升降机设计中的一部分。
电气系统一般包括电机、电源、电控柜等组成部分。
电机用于提供动力,驱动液压泵和液压油泵。
电源用于提供电能,保证电气系统正常工作。
电控柜用于控制电气系统的运行,实现升降机的控制和调试。
总之,液压升降机的设计是一个复杂的过程,需要考虑到结构、液压系统、安全系统和电气系统等多个方面。
在设计过程中,需要根据实际情况和需求,选择适当的结构和技术方案,以确保液压升降机的安全可靠运行。
液压支架的控制系统设计摘要在采煤工作面的煤炭生产过程中,为了防止顶板冒落,维持一定的工作空间,保证工人安全和各项作业正常进行,必须对顶板进行支护。
而液压支架是以高压液体为动力,由液压元件与金属构件组成的支护和控制顶板的设备,它能实现支撑、切顶、移架和推移输送机等一整套工序。
实践表明液压支架具有支护性能好、强度高、移架速度快、安全可靠等优点。
液压支架与可弯曲输送机和采煤机组成综合机械化采煤设备,它的应用对增加采煤工作面产量、提高劳动生产率、降低成本、减轻工人劳动和保证安全生产是不可缺少的有效措施。
因此,液压支架是技术上先进、经济上合理、安全上可靠,是实现采煤综合机械化和自动化不可缺少的主要设备。
关键词:液压支架、控制系统、支护第一章液压支架的技术现状一、国内外液压支架技术的差距目前,我国国产液压支架的控制方式仍然停留在跟机手把单向邻架控制或本架控制水平。
这种控制方式,虽然具有控制系统简单、制造容易、造价较低和对煤层地质条件变化适应性较强的优点,但它存在严重缺点:1)工人劳动条件差,安全性差;2)移架速度慢,影响采煤机效率的发挥;3)通风条件差,支架故障率高;4)支架支护效能的发挥程度与操作人员的经验多少和技能高低有密切关系。
综采比例低,与世界产煤大国的地位极不相称。
世界主要产煤国家的综采比例都是全国煤炭井工生产的比例。
波兰是92.5%,俄罗斯是85.7%,乌克兰是76.4%,而美国、德国、英国、日本都是99%以上。
我国1998年统计,国有重点煤矿回采产量3.67亿吨,只有1.87亿吨是综采生产,占49.32%。
而国有地方煤矿的综采比例远低于此数,乡镇地方煤矿则基本是空白。
据初步估计,按全国井工生产的煤炭来算,综采比例只有23%左右。
在支架材料、加工工艺、性能和使用寿命等方面与世界先进国家相比还有很大差距。
支架液压系统的阀类,用的是乳化油,防锈蚀要求很高,国外一直使用铜合金阀壳和高强度不锈钢阀芯,我国是45号钢加表面防腐处理。
需要根据拆卸和维修过程的顺序和系统体系结构,主发电机,必须暂停在液压升降平台,使负载绝缘升降平台,以抵消严重的重心的中心。
而且,在这个过程中的检修作业解体组装,拆卸的组件,负载重心位置可能发生变化。
如此大范围的部分负荷和重心变化,液压升降平台,以确保精度和刚度的同步运动,造成了很多的困难。
在吊装过程中,由于同步所造成的柴油发电机组这个怪物的倾斜,摇摆和起伏的维修工人在心理上造成恐惧,严重的甚至会影响安全生产的问题。
同步准确度成为关键指标来衡量液压升降平台的性能评估。
液压升降平台同步若干次选择,测试,修改,经过多年的不懈研究,最终找到一个更好的解决方案的问题的解决方案。
一个液压升降平台同步方案通过安装测试,发现系统最大的优势是简单的,经济的,但有三个问题。
1,同步精度不高,或同步刚性不足。
当外部载荷施加器,平台也常常出现歪斜现象,它是很难保持水平。
移除平台钢结构,每个气缸的无约束负载测试。
事实证明,分流阀流量分流器精度太低,会导致显着的下降。
同样是真实的,当将电流收集。
设置流量控制阀的油流速度从零到一个稳定的值根据数据分析,分流阀不起同步作用,在这个动态的过程,它只能保证执行器的静态速度同步。
因此,每个液压缸中的起始时刻是不一致的速度。
2,同步误差的累积影响液压升降平台的实用性。
液压缸的每个去的上部和下部的死点,可以窜油通过阀孔中,从而使活塞死消除后累积误差。
但是,在电梯的实际工作是很困难的事,往往需要留在旅途中或退货的方式。
液压缸每次启动时,通过分流和集流流,产生一个错误,最终导致同步误差的积累,影响设备的正常工作。
3,发现在测试系统中存在的另一个问题是:下降的升降平台超载测试,系统稳定性差,管道振动和噪音。
检查分析,因为活塞下行过程中,由于油压力损失控制,液控单向阀的控制油压力建立起来后关闭的关闭,重新打开活塞向下,如此循环活塞的下降间歇性管道激烈振荡。
改善后的一系列单向节流阀背压平衡是有限的,但下降的速度控制系统的设计是不理想的。
液压系统升降机的设计液压系统升降机是一种通过流体传输能量来驱动升降机运动的装置。
液压系统升降机具有结构简单、运行平稳、载重能力大等特点,被广泛应用于各个领域。
在设计液压系统升降机时,需要考虑以下几个方面:升降机的结构设计、液压系统的选择、液压系统的布置和控制系统的设计。
升降机的结构设计是整个升降机设计的基础。
在选择结构设计时,需要考虑升降机的使用环境、升降高度、载重能力等因素。
一般来说,升降机的结构设计可以分为单柱式、双柱式和四柱式等不同结构形式。
单柱式结构设计简单,适用于小型升降机;双柱式结构设计稳定,适用于中型升降机;四柱式结构设计稳定性更好,适用于大型升降机。
液压系统是升降机运行的核心,其选择需要考虑升降机的使用要求和实际情况。
常见的液压系统包括单作用液压系统和双作用液压系统。
单作用液压系统只有一个液压缸,液压油只能在其中一个方向上流动,适用于升降机只需要单向运动的场合;双作用液压系统有两个液压缸,液压油可以在两个方向上流动,适用于升降机需要双向运动的场合。
液压系统的布置是升降机设计中一个重要的环节。
在液压系统的布置中,需要考虑液压泵、液压缸、油箱和管道等组件的摆放位置。
液压泵负责提供液压系统所需的液压能量,通常位于油箱下方。
液压缸是升降机运动的驱动装置,放置在升降机的柱子上。
油箱用于储存液压油,并且应该位于液压泵的上方,以便液压油可以自然流向液压泵。
控制系统的设计是升降机设计中的另一个关键环节。
在控制系统的设计中,需要考虑如何控制液压系统以实现升降机的运动。
一般来说,控制系统可以采用手动、自动或遥控等不同的方式。
手动控制方式可以通过操纵杆或按钮来控制升降机的升降;自动控制方式可以通过传感器和电气元件来实现对升降机的控制;遥控方式可以通过无线遥控装置来远程控制升降机的升降。
总之,液压系统升降机的设计需要综合考虑结构设计、液压系统的选择、液压系统的布置和控制系统的设计等因素。
正确的设计能够确保升降机的稳定运行和安全使用。
液压同步顶升系统原理嘿,朋友们!今天咱来聊聊液压同步顶升系统原理。
这玩意儿啊,就像是一群齐心协力的大力士,能把重物稳稳地举起来。
你看啊,液压同步顶升系统就像是一个超级团队。
液压泵就好比是这个团队的老大,源源不断地给大家提供动力,让大家有劲儿干活儿。
那些液压缸呢,就是一个个强壮的队员,听从老大的指挥,一起用力把东西顶起来。
想象一下,要是这些液压缸有的用力大,有的用力小,那岂不是乱套啦?所以啊,这里面就有个很关键的东西,叫做同步阀。
它就像是个公平的裁判,让每个液压缸都能使一样的力气,这样才能保证顶升得稳稳当当的。
再说说液压油,这可是整个系统的“血液”啊!它在管道里跑来跑去,把动力从液压泵传到液压缸。
要是这“血液”出了问题,那整个系统不就瘫痪啦?咱平时生活中也有类似的情况呀。
比如说大家一起抬桌子,要是有人使的劲儿不一样,桌子不就歪了嘛。
这液压同步顶升系统也是一样的道理,得让大家劲儿往一处使。
你知道吗,液压同步顶升系统在很多地方都大显身手呢!比如在建筑工地上,要把大型的构件顶升到位,没有它可不行。
还有在桥梁维修的时候,它能把桥梁稳稳地顶起来,方便工人进行维修。
这可真是个了不起的发明啊!它就像是一个默默无闻的英雄,在背后为我们的生活提供着便利。
虽然我们平时可能不太注意到它,但它却一直在那里发挥着重要的作用。
而且啊,这个液压同步顶升系统还特别可靠。
只要你好好维护它,它就能一直为你效力。
就像一个忠诚的朋友,只要你对它好,它就绝对不会掉链子。
你说神奇不神奇?这么一个看似简单的系统,里面却蕴含着这么多的奥秘和智慧。
咱不得不佩服那些发明它的人,真是太有才了!所以啊,朋友们,下次再看到那些大型机械在工作的时候,不妨想想里面是不是有液压同步顶升系统在默默地工作呢。
它可是为我们的生活做出了很大的贡献呢!。
摘要本文主要介绍了在汽车维修行业中,为了提高汽车维修的效率,对其所用到的液压同步升降平台系统的研究和设计。
该设计主要通过理论设计的研究进行液压同步系统的设计、升降平台机械结构的设计以及液压升降平台的电气控制部分的设计。
为了满足升降平台在汽车维修中所能够实现的同步精度和实现两前轮、两后轮、两左轮、两右轮及汽车整体分别实现同步升降一定的功能要求,该系统在液压系统的设计采用的是电液比例方向阀,通过位移检测,利用西门子PLC的PID控制,稳定快速的消除升降缸的位移差值来控制电液比例阀的开口大小,并通过一定的液压系统和机械系统实现升降平台四缸的相应功能和同步精度。
为了保证液压升降系统的特殊功能,液压系统还采用了分流集流阀的特殊忧点,来实现一定精度的两缸同步升降。
本次设计的机械结构完全采用的是Pro/E三维软件进行建模,通过三维机械结构造型的设计,体现了三维设计建模的优点,使得机械结构更为直观。
液压系统部分通过重力的动力提供,在下降时是通过蓄能器提供的压力,使得液控单向阀接通油路,直接利用重力实现平台的下降,实现了节能的效果。
关键词:液压同步升降平台;Pro/E三维建模;电液比例控制;PLCAbstractIn this paper, in order to improve the efficiency of vehicle maintenance in the automotive repair industry, the use of its hydraulic system of synchronous lifting platform and design. The design is mainly conducted through the theoretical design of the hydraulic synchronization system design, mechanical structure design of lifting platform and hydraulic lift platform, electrical control design. In order to meet the lifting platform in the automotive repair can be achieved in the realization of synchronization accuracy and the two front, two rear, two revolvers, two-wheel vehicles and the right to synchronize the whole were down certain functional requirements, the system used in the hydraulic system design the electro-hydraulic proportional directional control valve, through the displacement detection, the use of Siemens PLC, PID control, a steady and rapid elimination of the difference between lifting cylinder displacement hydraulic proportional valve to control the size of the opening, and through some of the hydraulic system and mechanical systems to achieve lift The corresponding four-cylinder platform features and sync accuracy. In order to ensure that the special features of hydraulic lift system, hydraulic system also uses a shunt valve set point of the special concern to achieve a certain precision of synchronized movements of the two cylinders. The design of the mechanical structure is fully implemented Pro / E three-dimensional software for modeling, through modeling three-dimensional mechanical structure design, modeling shows the advantages of three-dimensional design, making the mechanical structure is more intuitive. Hydraulic system to provide some momentum by gravity, in the fall when provided by accumulator pressure, making the oil check valve connected directly to the decline in the use of gravity to achieve platform to achieve the energy saving effect.Key Words:Hydraulic synchronous lifting platform;Pro / E three-dimensional modeling;Electro-hydraulic proportional control;PLC目录摘要 (I)Abstract (II)1 绪论 (1)1.1 汽车维修液压升降平台的概述 (1)1.1.1 液压升降平台在汽车维修的应用发展 (2)1.2 课题设计的主要内容和设计方法 (3)1.2.1 液压升降平台设计的主要内容 (3)1.2.2 液压升降平台设计的主要方法 (3)2 液压升降同步系统的液压系统方案设计 (5)2.1 液压系统要求的总体简述 (5)2.2 液压同步升降平台的液压系统原理图设计 (6)3 液压系统元件的计算与选取 (11)3.1 液压平台的运动与负载分析 (11)3.2 四柱内液压缸的设计计算与选取 (11)3.2.1 四柱内液压缸设计参数的确定 (11)3.2.2 四柱升降时液压平台的运动与负载分析 (11)3.2.3 四柱中四个液压缸的设计计算与选取 (11)3.3 平板上两个液压缸的设计计算与选取 ....................... 错误!未定义书签。
摘要本课题主要阐述了液压支架的设计过程。
设计内容包括:选架型、总体设计、主要零部件的设计、主要零部件的校核和液压系统的设计。
由于设计煤层适中,选用掩护式液压支架。
煤层厚度介于2.5~3.8m 之间,煤层厚度变化较大,选用调高范围大且抗水平推力强且带护帮装置的掩护式支架。
支架采用正四连杆机构,以改善支架的受力状况。
顶梁、掩护梁、底座均做成箱体结构;立柱采用单伸缩液压缸,前端带有加长杆,以满足支架最低及最高位置时的高度要求。
由于某些原因,没有上传完整的毕业设计(完整的应包括毕业设计说明书、相关图纸CAD/PROE、中英文文献及翻译等),此文档也稍微删除了一部分内容(目录及某些关键内容)如需要的朋友,请联系我的叩扣:2215891151在研制液压支架时,需要对支架进行生产试验和分析研究,确定合理的液压支架受力参数、运动参数和结构参数,以及选定液压支架最佳方案等方面综合性的科学技术问题。
关键词:液压支架;顶梁;底座;立柱;结构设计ABSTRACTThis paper mainly describes the design process of hydraulic support. Design elements include : chooses, overall design, main spare part design, the main spare part examination and the hydraulic system design.Due to the design of coal seam is moderate, selection of shield type hydraulic support. Coal seam thickness between 2.5~3.8m, coal seam thickness change is bigger, selection of high and wide range of horizontal thrust is strong and the slope protecting device of shield support. The support uses the four bar linkage mechanism, improves the support stress condition. Top beam, a shield beam, a base are made into a box body structure; the column uses the single telescopic hydraulic cylinder, front end with a lengthened rod, to meet the minimum and maximum position bracket height requirements.In the research of hydraulic support, the need for support for production testing and analysis, to determine a reasonable hydraulic support force parameters, motion parameters and structure parameters, and selected the best scheme of hydraulic support and other aspects of comprehensive science and technology issues.Keyword: Hydraulic pressure support;Top beam;Cradle一前言随着工业技术的不断发展,国民经济对煤炭需要量的日益增加,煤矿开采,特别是采煤工作面的生产技术面貌发生了巨大的变化。
液压同步提升系统组成液压同步提升系统的核心是一套液压提升设备。
它主要由柔性钢绞线或刚性支架承重系统、电液比例液压控制系统、计算机实时控制系统及传感器检测系统组成,如图2-1所示。
被提升结构件的水平度、液压提升油缸的位置、系统压力及温度等参数,通过相应的高差、位置和压力传感器转换为电信号输入到电气控制系统,并经计算机和控制器处理、判断,发出相应的控制命令或一定的控制信号,以满足提升过程的精度和可靠性要求,最终完成给定的提升任务。
图2-1 液压同步提升系统的组成根据液压同步提升系统的结构及功能,可以看出它主要由承重系统、传感检测系统、电液比例液压控制和电气控制系统组成。
根据被提升对象的不同,承重系统又分为柔性钢绞线承重系统和刚性支架承重系统。
采用不同的承重系统其液压提升油缸的结构不同,但其提升原理是一致的。
故在以下的提升系统分析中,只就采用柔性钢绞线的承重系统进行分析,其结论也适用于刚性支架承重系统。
一、承载系统由于提升结构具有大吨位、超高空的施工要求,就使得承重系统不但要有足够大的承载能力,而且要有足够长的承重索具。
为此,采用抗拉强度大、单根制作长度较长的柔性钢绞线作为承重索具;采用承载能力大、自重轻、结构紧凑的液压提升器作为提升机具。
这样承重系统可按一定的方式组合使用钢绞线和提升器集群,可使得承重系统的提升重量及高度不受限制。
1)提升机具液压提升器的结构如图2-2所示。
它是由提升主油缸4和位于两端的锚具3和5构成。
锚具3和5因提升器直立放置,分别简称为上锚具和下锚具。
当提升器倒立放置时,上锚具和下锚具与现在所指锚具的位置正好相反。
锚具由楔形夹具和一个控制夹具动作的锚具油缸组成。
它们通过楔形夹具的单向自锁作用夹紧钢绞线,而松开锚具则要通过提升主油缸和锚具油缸的配合才能打开。
承重系统提升力是通过提升器主油缸大腔进油产生的。
工作时,钢绞线穿过上锚、活塞杆空心部分和下锚,通过锚具的切换和主油缸的伸缩来完成提升动作。
液压支架同步升降系统设计
摘要:本文分析了液压同步系统的研究现状及存在的问题,并据此设计出运用电液比例伺服阀实现四缸同步的液压控制系统,建立了升降同步控制系统的解析模型,在分析模型时作了一些假设,并忽略了某些参数的影响,进而从分析简化的数学模型得出了优化系统静,动态特性的条件。
针对建模结果存在的同步误差,分析了误差产生的原因,提出了减小误差的方法。
关键词:同步控制电液伺服机构PID控制
0 引言
随着液压技术在工程领域中的广泛采用,不同液压机构之间的同步问题日益得到重视。
由于每一套液压机构负载存在差异、元件性能不同以及制造误差,损耗等使得多执行机构在同步运动中会产生误差。
电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统,通过使用电液伺服阀,将小功率的电信号转换为大功率的液压动力,从而可实现一些重型大功率机械设备的伺服控制,具有结构简单、控制精度高、易于实现自动控制等特点。
本文以阀控非对称缸形式的电液伺服机构为研究对象,采用计算机控制技术,在提高控制精度的同时,降低同步误差。
1同步升降系统简介
液压支架同步升降系统为周边四位结构,四个液压缸处于四个支点处。
整个系统要求在升降过程中速度平稳一致,防止梁体扭曲变形。
一般多点同步升降电液伺服系统具有两种形式:阀控和泵控方式。
阀控式由集中泵站提供动力源,压力油通过控制阀组的分配进入液压缸,系统通过各路阀件通断控制流量,从而实现同步;泵控式的动力源为分散形式,每个缸体由独立油泵驱动,油泵为变频调速电机驱动,通过调节油泵电机转速来调节各路流量,实现同步控制。
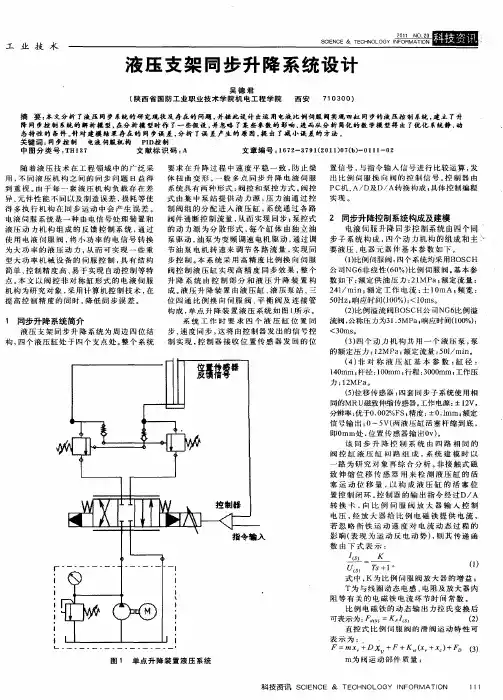
本系统采用高精度比例换向伺服阀控制液压缸实现高精度同步效果,整个升降系统由控制部分和液压升降装置构成。
液压升降装置由液压缸、液压泵站、三位四通比例换向伺服阀、平衡阀及连接管构成,单点升降装置液压系统如图1所示。
系统工作时要求四个液压缸位置同步、速度同步,这将由控制器发出的信号控制实现,控制器接收位置传感器发回的位置信号,与指令输入信号进行比较运算,发出比例伺服换向阀的控制信号。
控制器由PC机、A/D及D/A转换构成;具体控制编程实现。
2同步升降控制系统构成及建模
电液伺服升降同步控制系统由四个同步子系统构成,四个动力机构的组成和主要液压、电器元器件基本参数如下:
(1)比例伺服阀:四个系统均采用BOSCH公司NG6非线性(60%)比例伺服阀。
基本参数如下:额定供油压力:21Mpa;额定流量:24L/min;额定工作电流:士10mA;频宽:50Hz;响应时间(100%):<10ms
(2)比例溢流阀BOSCH公司NG6比例溢流阀,公称压力为31.5MPa;响应时间(100%):<30ms
(3)四个动力机构共用一个液压泵,泵的额定压力:12MPa;额定流量:50L/min。
(4)非对称液压缸基本参数:缸径:140mm;杆径:100mm;行程:3000mm;工作压力:12MPa
(5)位移传感器:四套同步子系统使用相同的MRU磁致伸缩传感器。
工作电源:士12V,分辨率:优于0.002%FS;精度:士0.lmm;额定信号输出:0-5V(两液压缸活塞杆缩到底,即0mm处,位置传感器输出0V)
该同步升降控制系统由四路相同的阀控缸液压缸回路组成,系统建模时以一路为研究对象再综合分析。
非接触式磁致伸缩位移传感器用来检测液压缸的活塞运动位移量,以构成液压缸的活塞位置控制闭环。
控制器的输出指令经过D/A转换卡,向比例伺服阀放大器输入控制电压,经放大器给比例电磁铁提供电流,若忽略衔铁运动速度对电流动态过程的影响(表现为运动反电动势),则其传递函数由下式表
示:
根据阀控液压缸的三个基本方程推导得出阀控液压缸同步控制系统的误差传递函数数学模型。
传递函数中流量增益K;的值会随着比例伺服阀的阀口压差的变化而变化,公式中的部分参数值也会随着液压系统油温、压力等参数的变化而变化。
因此系统控制策略的研究和选择,对于获得良好的控制性能显得尤为重要。
3阀控液压缸式位置系统中PID控制器研究
3.1PID控制概述
PID控制是比例积分微分控制的简称。
PID控制是在工业过程中历史最久、生命应用最广泛的基本控制算法。
PID控制的优点是原理简单,使用方便,鲁棒性较强。
也就是说,其控制品质对特性变化灵敏度比较低,调节器参数调整比较容易;具有无余差能力,精度较高;可用于各类工业过程控制,并已商品化。
计算机过程控制的基本算法也仍然是PID控制,据估计工业控制中PID应用占90%以上。
3.2控制算法在计算机中的实现
3.2.1信号输入
采用计算机(包括微型计算机)来实现离散PID控制时,一台计算机往往要控制多个回路。
输入信号须经过多路开关采样,送往放大器及A/D转换器,然后由CPU进行运算。
输入信号必须经过模拟和数字滤波。
计算机控制多个控制回路必须按顺序进行。
不同物理量的采样时间可以不同。
对于每一个控制回路,每巡回一次完成输入采样、PID运算和输出三个步骤。
输入信号除模拟量外,还有开关量和脉冲量,他们不需要A/D转换。
3.2.2信一号的量化
在计算机中是用二进制代码进行运算的,因此,输入的测量值和设定值都必须经量化变为数字量。
3.2.3信号的非线性化处理
有许多变送器输出的标准信号与被控量之间关系不是线性的,为使它们的关系线性化,需对代表流量的差压变送器输出进行开方;对流量进行温度、压力补偿;对代表温度的热电偶输出的电势进行分段线性化,可采用下式计算
3.2.4 输出
信号非线性处理后经过圆整误差、抑制噪声后进行输出。
计算机输出有模拟量、脉冲量和开关量三种。
数字计算机运算结果经过D/A 转换后就是模拟输出,它经电器转换后可操纵调解阀。
在采样间隔必须采用保持器进行保持。
脉冲量输出可以直接驱动步进电机,这时采样算法应采用增量型。
步进电机带动电位器,转换成电流信号,再经电器转换来操纵调解阀。
开关量输出用来控制阀门的开闭或电动机的启停,常用于连锁保护或程序(顺序)控制。
4 结论
系统分成两步进行了测试。
在工控机进行同步控制系统控制软件和电模拟试验。
其主要准备工作是采购位移传感器、工控机、PCI接口板卡、高精度的伺服电源等。
主要是调试控制软件的运行质量,验证其可行性,同事对各传感器进行测试,试验其位移反馈信号能否与工控机的容量和运算速度相互匹配。
是否能够满足整个同步控制系统的精度要求。
然后对液压支架试验台的液压系统进行调试,确保PLC 能够正确读入和输出控制信号,逻辑程序准备无误的情况下,在一定的时间间隔下测得四个液压缸的实际位置数值,通过对数据的处理,验证所选控制策略的控制效果良好。
参考文献
[1] 刘金馄等. 先进PID控制及其MATLAB仿真,北京:电子工业出版社,2003
[2]刘春芳,吴伟. 双电液伺服系统同步模糊控制研究[M].北京:机械工业出版社. .2005
[3]王积伟、陆一心、吴振顺. 现代控制理论与工程[M]. 北京:高等教育出版社2003
[4] 路角祥. 液压气动技术手册[M].北京:机械工业出版社.2002
[5] 吴根茂、邱敏秀、王庆丰. 新编实用电液比例技术[M].杭州:浙江大学出版社. 2006。