弹塑性力学第四章
- 格式:ppt
- 大小:4.01 MB
- 文档页数:73
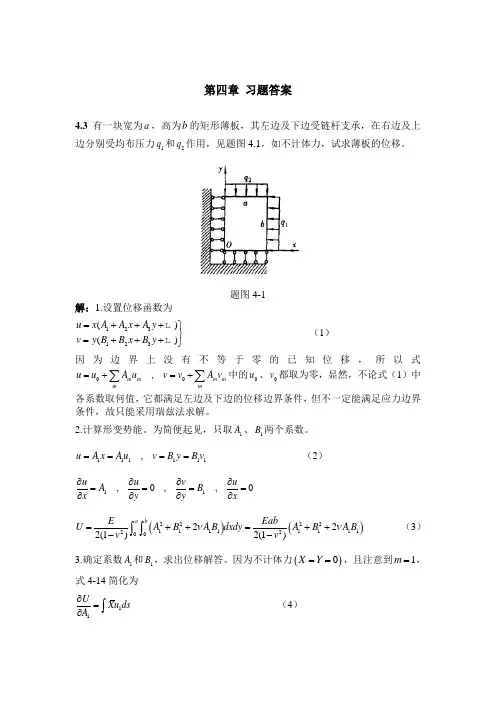
第四章 习题答案4.3有一块宽为a ,高为b 的矩形薄板,其左边及下边受链杆支承,在右边及上边分别受均布压力1q 和2q 作用,见题图4.1,如不计体力,试求薄板的位移。
题图4-1解:1.设置位移函数为123123()()u x A A x A y v y B B x B y =+++⎫⎬=+++⎭(1)因为边界上没有不等于零的已知位移,所以式00,m m m m mmu u A u v v A v =+=+∑∑中的0u 、0v 都取为零,显然,不论式(1)中各系数取何值,它都满足左边及下边的位移边界条件,但不一定能满足应力边界条件,故只能采用瑞兹法求解。
2.计算形变势能。
为简便起见,只取1A 、1B 两个系数。
111111,u A x Au v B y B v ==== (2) 11,0,,0uuvu A B x yyx∂∂∂∂====∂∂∂∂ ()()2222111111112200222(1)2(1)a b E Eab U A B A B dxdy A B A B v v νν=++=++--⎰⎰ (3) 3.确定系数1A 和1B ,求出位移解答。
因为不计体力()0X Y ==,且注意到1m =,式4-14简化为11UXu ds A ∂=∂⎰ (4)11UYv ds B ∂=∂⎰ (5) 对式(4)右端积分时,在薄板的上下边和左边,不是0X =,就是10u =,故积分值为零。
在右边界上有11,,X q u x a ds dy =-===()111bXu ds q ady q ab =-=-⎰⎰ (6)同理,式(5)右端的积分只需在薄板的上边界进行,()1220aYv ds q bdx q ab =-=-⎰⎰ (7)将式(3)、式(6)、式(7)分别代入式(4)、式(5)可解出1A 和1B :()1112222(1)EabA B q ab v ν+=---()1122222(1)EabB A q ab v ν+=--- 121q q A E ν-=-, 211q q B E ν-=- (8) 122111,q q q q u A x x v B y y E Eνν--==-==- (9)4.分析:把式(8)代入几何和物理方程可求出应力分量,不难验证这些应力分量可以满足平衡微分方程和应力边界条件,即式(8)所示位移为精确解答。
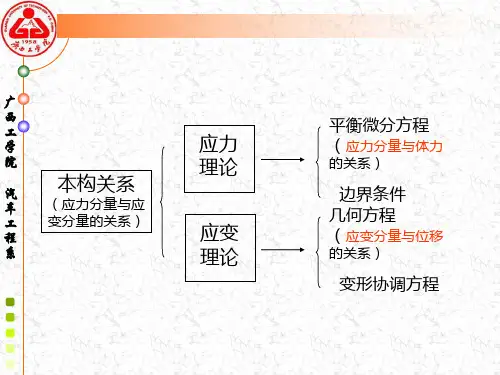
第四章本构方程在前面的章节中,已经建立了变形体的平衡微分方程和几何方程,分别是从静力学方面和从几何学方面考察了变形体的受力和变形。
但是只有这些方程还不足以解决变形体内的应力和变形问题。
对于变形体,未知变量包括6个应力分量,6个应变分量和3个位移分量,一共有15个未知函数,而平衡方程和几何方程一共是9个,未知函数的个数多于方程数。
因此还必须研究物体的物理性质,即应力与应变之间的关系。
通常称这种关系为变形体的本构方程,或称为物性方程。
塑性本构包括三个方面:1、屈服条件,2、流动法则,3、硬化关系;其中屈服条件:判断何时达到屈服,流动法则:屈服后塑性应变增量的方向,也即各分量的比值,硬化规律:决定给定的应力增量引起的塑性应变增量大小。
以上构成塑性本构关系。
4.1弹性应变能函数变形固体的平衡问题不仅需要运动微分方程、应变—位移方程(即变形几何方程)还需要将应变分量和应力张量分量联系起来,方能给定物体的材料抵抗各种形式变形的规律。
该规律的理论解释需要对分子间力的本质有深入的认识,该分子力力图使固体粒子间保持—定的距离,也就是需要对固体中应力分量和应变分量有深入的认识。
这种作用机理在非常接近稳定状态的气体中己弄清楚,但对于弹性体情况,目前科学技术发展水平还不能解决这一难题。
如要通过实验探求物体内部的应力和应变的关系,则总是从一些量的测量来推理得到,在一般情况下,这些量并非应力或应变的分量(例如平均应变、体积压缩、物体表面一线元的伸长等等).因此,在现时应力与应变关系主要是通过直接实验建立。
然而该关系中的某些固有的一般特性可以在理沦上加以说朋,如能量守恒定律为应力-应变关系的理论研究提供了基础。
1.1应变能密度假设变形的过程是绝热的,也就是在变形过程中系统没有热的损失,而且假设物体中任意无穷小单元改变其体积和形状所消耗的功与其从未变形状态到最终变形状态的转换方式无关。
这个条件是弹性的另一种定义。
换句话说,就是假设物体粒子互相作用过程中的耗散(非保守)力的作用与保守力的作用相比是可以忽略的。