图的矩阵表示(1)
- 格式:ppt
- 大小:691.50 KB
- 文档页数:15
第一章概论1、按图像的明暗程度和空间坐标的连续性,可以分为数字图像和模拟图像。
数字图像:可用计算机存储和处理,空间坐标和灰度均不连续。
模拟图像:计算机无法直接处理,空间坐标和明暗程度连续变化。
2遥感数字图像中的像素值称为亮度值(灰度值/DN值),它的高低由传感器所探测到的地物电磁波的辐射强度决定。
2、遥感数字图像处理的主要内容包括以下三个方面:图像增强、图像校正、信息提取。
1)图像增强:用来改善图像的对比度,突出感兴趣的地物信息,提高图像大的目视解译效果,它包括灰度拉伸、平滑、锐化、滤波、变换(K—L/K—T)、彩色合成、代数运算、融合等。
图像显示:为了理解数字图像中的内容,或对处理结果进行对比。
图像拉伸:为了提高图像的对比度(亮度的最大值与最小值的比值),改善图像的显示效果。
2)图像校正(恢复/复原):为了去除和压抑成像过程中由各种因素影响而导致的图像失真。
注意:图像校正包括辐射和几何校正,前者通过辐射定标和大气校正等处理将像素值由灰度级改变为辐照度或反射率,后者利用已有的参照系修改像素坐标,使得图像能够与地图匹配或多景图像之间可以相互匹配。
3)信息提取:从校正后的遥感数据中提取各种有用的地物信息。
包括图像分割、分类等。
图像分割:用于从背景中分割出感兴趣的地物目标。
分割的结果可作为监督分类的训练区。
图像分类:按照特定的分类系统对图像中像素的归属类别进行划分。
3、遥感数字图像处理系统:硬件系统(输入、存储、处理、显示、输出),软件系统。
4、数字图像处理的两种观点:离散方法(空间域)、连续方法(频率域)2.遥感图像的获取和存储1、遥感是遥感信息的获取、传输、处理以及分析判读和应用的过程。
遥感的实施依赖于遥感系统2、遥感系统是一个从地面到空中乃至整个空间,从信息收集、储存、传输、处理到分析、判读、应用的技术体系,主要包括遥感试验、信息获取(传感器、遥感平台)、信息传输、信息处理、信息应用等5个部分。


§4 线性变换的矩阵表示引言:数域P 上线性空间V 上的所有线性变换组成的集合—L (V )是数域P 的线性空间。
若V 是n 维线性空间,那么L (V )的维数是多少呢?L (V )与n n P ⨯之间具有什么关系?为此,我们先研究一下线性变换的矩阵表示。
一、线性变换在一组基下的矩阵表示:设n εεε,,,21 是数域P 上的n 维线性空间V 的一组基,A 是V 上的一个线性变换,对V ∈∀α,则有n n k k k εεεα+++= 2211 )()()(11n n A k A k A εεα++=∴又),1()(n i VA i =∈ε则有:)()()()(22112222112212211111*⎪⎪⎩⎪⎪⎨⎧+++=+++=+++=n nn n n n nn nn a a a A a a a A a a a A εεεεεεεεεεεε用矩阵形式表述(*)有⎪⎪⎪⎪⎪⎭⎫⎝⎛=nn n n n n n n a a a a a a a a a A A A 2122221112112121),,())(),(),((εεεεεε习惯上记上式左边为:),(21n A εεε,,则有:A A n n ),(),(2121εεεεεε,,,, =;这就有了下面的定义:1.Df 1.若A A n n ),(),(2121εεεεεε,,,, =则称A 为线性变换A 在基n εεε,,,21 下的矩阵,且可逆若V ∈α在n εεε,,,21 下的坐标为⎪⎪⎪⎭⎫⎝⎛n k k 1,那么)(αA 在基n εεε,,,21 下的坐标又如何呢?⎪⎪⎪⎭⎫ ⎝⎛=++=n n n n k k A A A A k A k A 12111))(),(),(()()()(εεεεεα⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛=n n n n k k A k k A 121121),,,(),,(εεεεεε可见,)(αA 在基n εεε,,,21 下的坐标是由A 与α在n εεε,,,21 下的坐标来确定的。
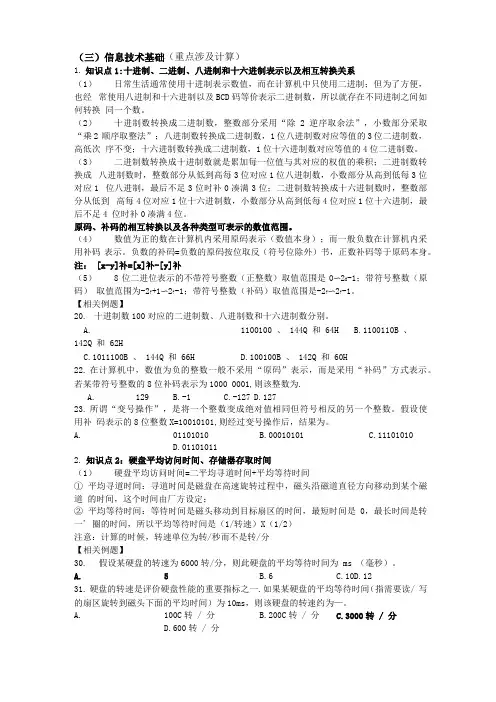
(三)信息技术基础(重点涉及计算)1.知识点1:十进制、二进制、八进制和十六进制表示以及相互转换关系(1)日常生活通常使用十进制表示数值,而在计算机中只使用二进制;但为了方便,也经常使用八进制和十六进制以及BCD码等价表示二进制数,所以就存在不同进制之间如何转换同一个数。
(2)十进制数转换成二进制数,整数部分采用“除2逆序取余法”,小数部分采取“乘2 顺序取整法”;八进制数转换成二进制数,1位八进制数对应等值的3位二进制数,高低次序不变;十六进制数转换成二进制数,1位十六进制数对应等值的4位二进制数。
(3)二进制数转换成十进制数就是累加每一位值与其对应的权值的乘积;二进制数转换成八进制数时,整数部分从低到高每3位对应1位八进制数,小数部分从高到低每3位对应1 位八进制,最后不足3位时补0凑满3位;二进制数转换成十六进制数时,整数部分从低到高每4位对应1位十六进制数,小数部分从高到低每4位对应1位十六进制,最后不足4 位时补0凑满4位。
原码、补码的相互转换以及各种类型可表示的数值范围。
(4)数值为正的数在计算机内采用原码表示(数值本身);而一般负数在计算机内采用补码表示。
负数的补码=负数的原码按位取反(符号位除外)书,正数补码等于原码本身。
注: [x-y]补=[x]补-[y]补(5)8位二进位表示的不带符号整数(正整数)取值范围是0〜28-1;带符号整数(原码)取值范围为-27+1〜27-1;带符号整数(补码)取值范围是-27〜27-1。
【相关例题】20.十进制数100对应的二进制数、八进制数和十六进制数分别。
A.1100100 、 144Q 和 64HB.1100110B 、142Q 和 62HC.1011100B 、 144Q 和 66HD.100100B 、 142Q 和 60H22.在计算机中,数值为负的整数一般不采用“原码”表示,而是采用“补码”方式表示。
若某带符号整数的8位补码表示为1000 0001,则该整数为.A.129B.-1C.-127D.12723.所谓“变号操作”,是将一个整数变成绝对值相同但符号相反的另一个整数。
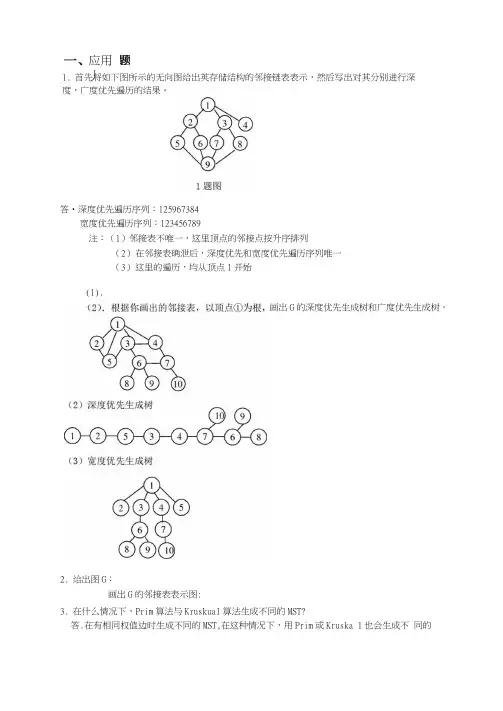
1. 首先将如下图所示的无向图给出英存储结构的邻接链表表示,然后写出对其分别进行深度,广度优先遍历的结果。
答•深度优先遍历序列:125967384宽度优先遍历序列:123456789注:(1)邻接表不唯一,这里顶点的邻接点按升序排列(2) 在邻接表确泄后,深度优先和宽度优先遍历序列唯一 (3) 这里的遍历,均从顶点1开始 2. 给出图G :画岀G 的邻接表表示图:3. 在什么情况下,Prim 算法与Kruskual 算法生成不同的MST?答.在有相同权值边时生成不同的MST,在这种情况下,用Prim 或Kruska 1也会生成不 同的应用丿 画出G 的深度优先生成树和广度优先生成树。
(1).HST4・已知一个无向图如下图所示,要求分别用Prim和Kruskal算法生成最小树(假设以①为起点,试画出构适过程)。
答.Prim算法构造最小生成树的步骤如24题所示,为节省篇幅,这里仅用Kruskal算法, 构造最小生成树过程如下:(下图也可选(2, 4)代替(3, 4), (5, 6〉代替⑴5))5.G=(V,E)是一个带有权的连通图,则:(1). ifi回答什么是G的最小生成树:(2). G为下图所示,请找出G的所有最小生成树。
答.(1)最小生成树的左义见上而26题(2)最小生成树有两棵。
邙艮于篇幅,下而的生成树只给岀顶点集合和边集合,边以三元组(Vi,Vj,W)形式),其中 W代表权值。
V (G) ={1, 2, 3, 4, 5} E1(G) = {(4, 5, 2), (2, 5, 4), (2, 3, 5), (1, 2,7) }:E2(G)={(4, 5, 2), (2, 4, 4), (2, 3, 5), (b 2、7) }6.请看下边的无向加权图。
(1).写出它的邻接矩阵。
(2).按Prim算法求其最小生成树, 并给出构造最小生成树过程中辅助数组的各分量值。
辅助数组各分量值:7.已知世界六大城市为:(Pe)、纽约(N)、巴黎(Pa).伦敦(L)、东京仃).墨西哥(M), 下表给泄了这六大城市之间的交通里程:世界六大城市交通里程表(单位:百公里)(1) .画岀这六大城市的交通网络图;(2) .画出该图的邻接表表示法;(3) .画岀该图按权值递增的顺序来构造的最小(代价)生成树.8.已知顶点1-6和输入边与权值的序列(如右图所示):每行三个数表示一条边的两个端点和貝权值,共11行。
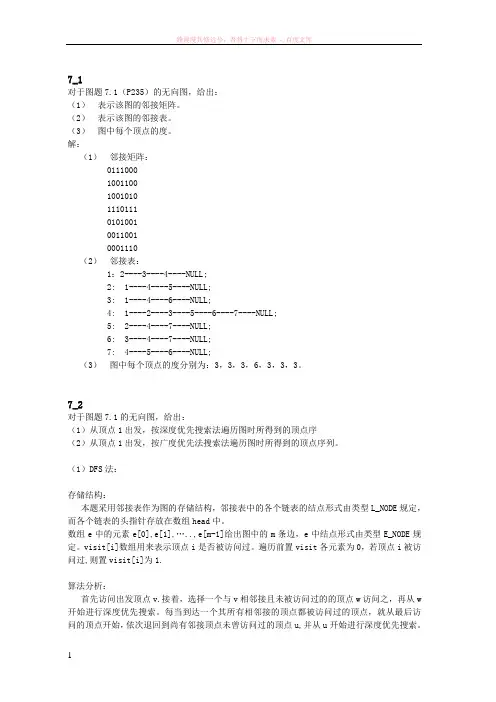
7_1对于图题7.1(P235)的无向图,给出:(1)表示该图的邻接矩阵。
(2)表示该图的邻接表。
(3)图中每个顶点的度。
解:(1)邻接矩阵:0111000100110010010101110111010100100110010001110(2)邻接表:1:2----3----4----NULL;2: 1----4----5----NULL;3: 1----4----6----NULL;4: 1----2----3----5----6----7----NULL;5: 2----4----7----NULL;6: 3----4----7----NULL;7: 4----5----6----NULL;(3)图中每个顶点的度分别为:3,3,3,6,3,3,3。
7_2对于图题7.1的无向图,给出:(1)从顶点1出发,按深度优先搜索法遍历图时所得到的顶点序(2)从顶点1出发,按广度优先法搜索法遍历图时所得到的顶点序列。
(1)DFS法:存储结构:本题采用邻接表作为图的存储结构,邻接表中的各个链表的结点形式由类型L_NODE规定,而各个链表的头指针存放在数组head中。
数组e中的元素e[0],e[1],…..,e[m-1]给出图中的m条边,e中结点形式由类型E_NODE规定。
visit[i]数组用来表示顶点i是否被访问过。
遍历前置visit各元素为0,若顶点i被访问过,则置visit[i]为1.算法分析:首先访问出发顶点v.接着,选择一个与v相邻接且未被访问过的的顶点w访问之,再从w 开始进行深度优先搜索。
每当到达一个其所有相邻接的顶点都被访问过的顶点,就从最后访问的顶点开始,依次退回到尚有邻接顶点未曾访问过的顶点u,并从u开始进行深度优先搜索。
这个过程进行到所有顶点都被访问过,或从任何一个已访问过的顶点出发,再也无法到达未曾访问过的顶点,则搜索过程就结束。
另一方面,先建立一个相应的具有n个顶点,m条边的无向图的邻接表。
数字图像处理课程复习大纲——————上大(11春季)已扩展第1章绪论要求:掌握《数字图像处理》理论及技术的基础性概念;掌握数字图像处理这门学科的基本理论及技术架构;熟悉其应用领域,硬件系统及设备1.1.数字图像及应用数字图像,各种电磁波谱及各种图像成像技术,以及图像处理在各种行业当中的应用,不同波段的图像,图像类型,图像应用领域1.信息是事物存在的一种形式,数据是信息的“符号”载体;2.图像:用各种观测系统①以不同的形式和手段观测世界②而获得的,可以直接或间接作用于人眼③并进而产生视知觉的实体④3.图像在计算机里的表示形式就是所谓的“数字图像”。
4.数字图像处理的应用主要有三方面的因素需要考虑:存储器的容量,计算速度,传输带宽。
5.图像的分类:按灰度分:二值图像和多灰度图像;按色彩分:单色图像和彩色图像;按运动分类:静态图像和动态图像;按时空分布分类:二维图像,三维图像和多维图像。
6.图像处理的基本内容:图像信息的获取,图像的存储,图像的传输,图像处理。
1.2.图像工程概述图像处理3层次,数字图像处理于其他学科的关系1.图像工程的三个层次:图像理解,图像分析,图像处理;2.图像:主要特点为由一系列的具有不同灰度值的像素所组成;图形:主要特点为由一组数学公式描述。
1.3.图像表示和显示图像与函数,像素,图像的矩阵表示,图像的解析表示,图像输出设备1.一幅图像一般可以用一个2-D函数f(x, y)来表示(计算机中为一个2-D数组)。
2.一幅图像可分解为许多个单元。
每个基本单元叫做图像元素,简称像素。
3.将一个区域分成3*3个单元以输出10种不同的灰度。
用“区域”来代替“像素”。
4.抖动技术:通过调节或变动图像的幅度值来改善量化过粗图像的显示质量。
1.4.数字图像存储格式存储器件,图像文件格式主题词:不同波段的图像,数字图像,数字图像处理系统,图像成像技术;3-D图像,彩色图像,多光谱图像,立体图像,序列图像,深度图像,纹理图像,投影重建图像,合成图像;图像处理,图像分析,图像理解;图像的矩阵表示,半调输出,抖动技术,BMP,GIF,TIFF,JPEG1.图像文件格式:一种是矢量形式,另一种是光栅形式。
1,1,1轴旋转的转动矩阵1.引言1.1 概述概述部分可以介绍本篇文章的主题和研究背景,以下是一种可能的写作方式:引言部分的概述旨在介绍本篇文章的主题以及相关的研究背景。
本文将探讨关于1,1,1轴旋转的转动矩阵的推导和定义。
转动矩阵是描述刚体在空间中旋转的重要工具,对于理解和分析物体在三维空间中的旋转运动具有重要意义。
在物理学和工程学领域,转动矩阵是描述物体三维旋转的数学工具,它能够以矩阵的形式表示,从而简化对旋转运动的描述和计算。
在实际应用中,转动矩阵在机器人学、飞行控制、计算机视觉等领域起着重要作用。
本文将特别关注1,1,1轴旋转的转动矩阵。
1,1,1轴旋转指的是绕过原点(0,0,0)的一个单位向量(1,1,1)进行旋转。
这种旋转在某些应用中有着特殊的意义和应用,例如在结构材料的弹性力学中。
在本文的2.1节,我们将首先介绍转动矩阵的定义,解释其基本概念和性质,为后续的推导提供必要的背景知识。
然后在2.2节,我们将详细推导1,1,1轴旋转的转动矩阵,并探讨其数学表达式和几何意义。
通过本文的研究,我们旨在提供关于1,1,1轴旋转的转动矩阵的深入理解,为相关领域的研究人员和工程师提供参考和指导。
深入研究转动矩阵的定义和推导将有助于我们对物体旋转运动的认识和应用,为实际问题的解决提供支持。
1.2文章结构1.2 文章结构本文将按照以下结构进行阐述:(1)引言:先对文章的主要内容进行概述,并说明文章的目的。
(2)正文:主要包括两个部分。
- 2.1 转动矩阵的定义:介绍转动矩阵的概念和基本性质,为后面的推导提供必要的背景知识。
- 2.2 1,1,1轴旋转的转动矩阵推导:详细推导得到1,1,1轴旋转的转动矩阵,并对其特性进行分析和讨论。
通过该推导,读者可以深入了解1,1,1轴旋转在三维空间中的变换规律。
(3)结论:对本文的主要内容进行总结,并得出结论。
同时,可以提出一些相关问题或者展望未来研究的方向。
通过以上的文章结构,读者可以逐步了解转动矩阵的定义、1,1,1轴旋转的转动矩阵的推导过程以及推导结果的意义和特性。