三角函数平移变换和周期变换
- 格式:ppt
- 大小:1.10 MB
- 文档页数:46
三角函数的变换与性质三角函数在数学中起着重要的作用,它们与三角学和几何学密切相关。
本文将探讨三角函数的变换与性质,包括平移、缩放和反射等变换,以及周期性、奇偶性和对称性等性质。
1. 平移变换三角函数的平移变换指的是在横轴或纵轴方向上对函数图像进行平移操作。
对于y = sin(x)来说,平移变换可以表示为y = sin(x - a)或y = sin(x + a),其中a表示平移的量。
当a大于0时,图像向右平移;当a小于0时,图像向左平移。
同样地,对于y = cos(x)和y = tan(x)等函数,也可以用相似的方式进行平移变换。
平移变换可以帮助我们理解函数图像的移动规律,对解决实际问题中的几何和物理相关问题具有重要意义。
2. 缩放变换三角函数的缩放变换是指改变函数图像在横轴或纵轴方向上的尺度。
对于y = sin(x)来说,缩放变换可以表示为y = a*sin(x)或y = sin(ax),其中a表示缩放的比例。
当a大于1时,函数的振幅增大,图像变窄;当a小于1时,函数的振幅减小,图像变宽。
类似地,对于y = cos(x)和y = tan(x)等函数,缩放变换也可以用类似的方式进行。
缩放变换可以帮助我们研究函数图像的形状和变化,对数学建模和图像处理等领域有着广泛应用。
3. 反射变换三角函数的反射变换是指改变函数图像关于横轴或纵轴的对称性。
对于y = sin(x)来说,反射变换可以表示为y = -sin(x)或y = sin(-x),其中负号表示对称性的改变。
经过纵轴反射后,图像关于纵轴对称;经过横轴反射后,图像关于横轴对称。
对于y = cos(x)和y = tan(x)等函数,也可以通过反射变换来改变图像的对称性。
反射变换有助于我们研究三角函数图像的特征和性质,对对称几何和信号处理等领域有一定的应用价值。
4. 周期性三角函数具有明显的周期性特征,即函数在一定区间内的值重复出现。
对于y = sin(x)来说,它的周期为2π,即在每个2π的区间内,函数的值会重复。
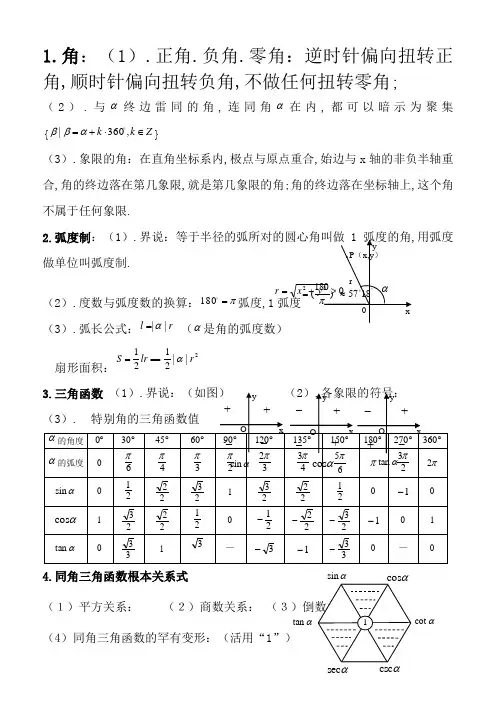
1.角:(1).正角.负角.零角:逆时针偏向扭转正角,顺时针偏向扭转负角,不做任何扭转零角;(2).与α终边雷同的角,连同角α在内,都可以暗示为聚集{Z k k ∈⋅+=,360|αββ} (3).象限的角:在直角坐标系内,极点与原点重合,始边与x 轴的非负半轴重合,角的终边落在第几象限,就是第几象限的角;角的终边落在坐标轴上,这个角不属于任何象限.2.弧度制:(1).用弧度做单位叫弧度制.(2).度数与弧度数的换算:π=180弧度,1(3).弧长公式:r l ||α= (α是角的弧度数) 扇形面积:2||2121r lr S α===4.同角三角函数根本关系式(1)平方关系: (2)商数关系: (4)同角三角函数的罕有变形:(活用“1”)=r αsecαsinαtan αcotcsc①.αα22cos 1sin -=, αα2cos 1sin -±=;αα22sin 1cos -=, αα2sin 1cos -±=;②θθθθθθθ2sin 2cos sin sin cos cot tan 22=+=+,αααααααθθ2cot 22sin 2cos 2cos sin sin cos tan cot 22==-=-③ααααα2sin 1cos sin 21)cos (sin 2±=±=±, |cos sin |2sin 1ααα±=± 5.引诱公式:(奇变偶不变,符号看象限)公式一: ααααααtan )360tan(cos )360cos(sin )360sin(=︒⋅+=︒⋅+=︒⋅+k k k公式二: 公式三: 公式四: 公式五:填补:ααπααπααπcot )2tan(sin )2cos(cos )2sin(=-=-=-ααπααπααπcot )2tan(sin )2cos(cos )2sin(-=+-=+=+ααπααπααπcot )23tan(sin )23cos(cos )23sin(=--=--=-ααπααπααπcot )23tan(sin )23cos(cos )23sin(-=+=+-=+6.两角和与差的正弦.余弦.正切7 .辅角公式⎪⎪⎭⎫ ⎝⎛++++=+x b a b x b a a b a x b x a cos sin cos sin 222222 (个中ϕ称为帮助角,ϕ的终边过点),(b a ,a b =ϕtan ) (多用于研讨性质)8.二倍角公式:(1).α2S : αααcos sin 22sin = (2).降次公式:(多用于研讨性质)α2C : ααα22sin cos 2cos -=ααα2sin 21cos sin =α2T :ααα2tan 1tan 22tan -=212cos 2122cos 1cos 2+=+=ααα (3).二倍角公式的经常运用变形:①.|sin |22cos 1αα=-,|cos |22cos 1αα=+;②.|sin |2cos 2121αα=-,|cos |2cos 2121αα=+③22sin 1cos sin 21cos sin 22244ααααα-=-=+; ααα2cos sin cos 44=-;④半角:2cos 12sinαα-±=,2cos 12cosαα+±=,αααcos 1cos 12tan+-±=ααααcos 1sin sin cos 1+=-=9.三角函数的图象性质(1).函数的周期性:①.界说:对于函数f (x ),若消失一个非零常数T,当x 取界说域内的每一个值时,都有:f (x +T )= f (x ),那么函数f (x )叫周期函数,非零常数T 叫这个函数的周期;②.假如函数f (x )的所有周期中消失一个最小的正数,这个最小的正数叫f (x )的最小正周期.(2).函数的奇偶性:①.界说:对于函数f (x )的界说域内的随意率性一个x ,都有:f (-x )= - f (x ),则称f (x )是奇函数,f (-x )= f (x ),则称f (x )是偶函数②.奇函数的图象关于原点对称,偶函数的图象关于y 轴对称;③.奇函数,偶函数的界说域关于原点对称;(3).正弦.余弦.正切函数的性质(Z k ∈)x y sin =图象的五个症结点:(0,0),(2π,1),(π,0),(23π,-1),(π2,0);x y cos =的对称中间为(,2ππ+k );对称轴是直线πk x =; )cos(ϕω+=x A y 的周期ωπ2=T ;x y tan =的对称中间为点(0,πk )和点(,2ππ+k ); )tan(ϕω+=x A y 的周期ωπ=T ;(4).函数)0,0)(sin(>>+=ωϕωA x A y 的相干概念:)sin(ϕω+=x A y 的图象与x y sin =的关系:①.振幅变换:x y sin =x A y sin = 当A 1>时,图象上各点的纵坐标伸长到本来的A 倍当<0A 1<时,图象上各点的纵坐标缩短到本来的A 倍当1>ω时,图象上各点的纵坐标缩短到本来的ω1倍当<01<ω时,图象上各点的纵坐标伸长到本来的1倍②.周期变换:x y sin =x y ωsin =③.相位变换:x y sin =)sin(ϕ+=x y ④.平移变换:x A y ωsin =)sin(ϕω+=x A y 常论述成:①.把x y sin =上的所有点向左(0>ϕ时)或向右(0<ϕ时)平移|ϕ|个单位得到)sin(ϕ+=x y ;②.再把)sin(ϕ+=x y 的所有点的横坐标缩短(1>ω)或伸长(<01<ω)到本来的ω1倍(纵坐标不变)得到)sin(ϕω+=x y ;③.再把)sin(ϕω+=x y 的所有点的纵坐标伸长(1>A )或缩短(<01<A )到本来的A 倍(横坐标不变)得到)sin(ϕω+=x A y 的图象.先平移后伸缩的论述偏向:)sin(ϕω+=x A y 先平移后伸缩的论述偏向: )](sin[)sin(ωϕωϕω+=+=x A x A y10.三角函数求值域(1)一次函数型:B x A y +=sin ,例:5)123sin(2+--=πx y ,x x y cos sin =用帮助角公式化为:=+=x b x a y cos sin )sin(22ϕ+⋅+x b a ,例:x x y cos 3sin 4-=(2)二次函数型:①.二倍角公式的运用:x x y 2cos sin += ②.代数代换:x x x x y cos sin cos sin ++= 第五章.平面向量1.空间向量:(1).界说:既有大小又有偏向的量叫做向量,向量都可用统一平面内的有向线段暗示.(2).零向量:长度为0的向量叫零向量,记作0;零向量的偏向是随意率性的. (3).单位向量:长度等于1个单位长度的向量叫单位向量;与向量a 平行的当0>ϕ时,图象上的各点向左平移ϕ个单位倍 当0<ϕ时,图象上的各点向右平移||ϕ个单位倍当0>ϕ时,图象上的各点向左平移ωϕ个单位倍 当0<ϕ时,图象上的各点向右平移||ωϕ个单位倍单位向量:||a a e =;(4).平行向量:偏向雷同或相反的非零向量叫平行向量也叫共线向量,记作b a //;划定0与任何向量平行;(5).相等向量:长度雷同且偏向雷同的向量叫相等向量,零向量与零向量相等;随意率性两个相等的非零向量,都可以用统一条有向线段来暗示,并且与有向线段的起点无关.2.向量的运算:(1).向量的加减法:aa λ; ;面内的任一贯量a ,有且只有一对实数21,λλ,使2211e e a λλ+=;不共线的向量21,e e 叫这个平面内所有向量的一组基向量,{21,e e }叫基底. 4.平面向量的坐标运算:(1).运算性质:()()a a a cb ac b a a b b a =+=+++=+++=+00,,(2).坐标运算:设()()2211,,,y x b y x a ==→→,则()2121,y y x x b a ±±=±→→设A.B 两点的坐标分离为(x 1,y 1),(x 2,y 2),则()1212,y y x x AB --=→.(3).实数与向量的积的运算律: 设()y x a ,=→,则λ()()y x y x a λλλ,,==→,(4).平面向量的数目积:①. 界说:⎪⎭⎫⎝⎛≤≤≠≠⋅=⋅→→→→→→→→001800,0,0cos θθb a b a b a , 00=⋅→→a .接①.平面向量的数目积的几何意义:向量a 的长度|a |与b 在a 的偏向上的投影|b |θcos 的乘积;③.坐标运算:设()()2211,,,y x b y x a ==→→,则2121y y x x b a +=⋅→→ ;向量a 的模|a |:a a a ⋅=2||22y x +=;模|a |22y x +=④.设θ是向量()()2211,,,y x b y x a ==→→的夹角,则222221212121cos y x y x y y x x +++=θ,a ⊥b 0=⋅⇔b a5.主要结论:(1).两个向量平行的充要前提: →→→→=⇔b a b a λ//)(R ∈λ设()()2211,,,y x b y x a ==→→,则⇔→→b a //01221=-y x y x(2).两个非零向量垂直的充要前提:0=⋅⇔⊥→→→→b a b a设 ()()2211,,,y x b y x a ==→→,则 02121=+⇔⊥→→y y x x b a(3).两点()()2211,,,y x B y x A 的距离:221221)()(||y y x x AB -+-=(4).P 分线段P 1P 2的:设P (x,y ) ,P 1(x 1,y 1) ,P 2(x 2,y 2) ,且→→=21PP P P λ ,(即||21PP P P =λ)则定比分点坐标公式⎪⎪⎩⎪⎪⎨⎧++=++=λλλλ112121y y y x x x , 中点坐标公式⎪⎪⎩⎪⎪⎨⎧+=+=222121y y y x x x (5).平移公式:假如点 P (x,y )按向量()k h a ,=→平移至P ′(x ′,y ′),则⎪⎩⎪⎨⎧+=+=.,''k y y h x x。
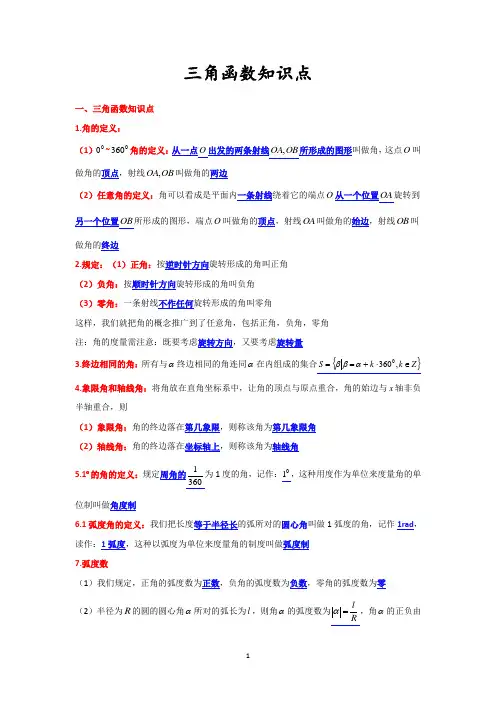
三角函数知识点一、三角函数知识点 1.角的定义:(1)00~0360角的定义:从一点O 出发的两条射线OB OA ,所形成的图形叫做角,这点O 叫做角的顶点,射线OB OA ,叫做角的两边(2)任意角的定义:角可以看成是平面内一条射线绕着它的端点从一个位置OA 旋转到另一个位置OB 所形成的图形,端点O 叫做角的顶点,射线OA 叫做角的始边,射线OB 叫做角的终边2.规定:(1)正角:按逆时针方向旋转形成的角叫正角 (2)负角:按顺时针方向旋转形成的角叫负角 (3)零角:一条射线不作任何旋转形成的角叫零角这样,我们就把角的概念推广到了任意角,包括正角,负角,零角 注:角的度量需注意:既要考虑旋转方向,又要考虑旋转量3.终边相同的角:所有与α终边相同的角连同α在内组成的集合{}Z k k S ∈⋅+==,3600αββ 4.象限角和轴线角:将角放在直角坐标系中,让角的顶点与原点重合,角的始边与x 轴非负半轴重合,则(1)象限角:角的终边落在第几象限,则称该角为第几象限角 (2)轴线角:角的终边落在坐标轴上,则称该角为轴线角 5.1º的角的定义:规定周角的3601为1度的角,记作:01,这种用度作为单位来度量角的单位制叫做角度制6.1弧度角的定义:我们把长度等于半径长的弧所对的圆心角叫做1弧度的角,记作1rad ,读作:1弧度,这种以弧度为单位来度量角的制度叫做弧度制7.弧度数(1)我们规定,正角的弧度数为正数,负角的弧度数为负数,零角的弧度数为零 (2)半径为R 的圆的圆心角α所对的弧长为l ,则角α的弧度数为Rl=α,角α的正负由α终边的旋转方向决定注:弧度制与角度制区别:(1)弧度制是以“弧度”为单位来度量角的单位制,角度制是以“度”为单位来度量角的单位制,1弧度≠1度(2)1弧度是弧长等于半径长的圆弧所对的圆心角的大小,而1度是周角的3601所对的圆心角的大小(3)弧度制是十进制,它的表示是用一个实数表示,而角度制是六十进制; (4)以弧度和度为单位的角,都是一个与半径无关的定值 8.弧度制与角度制的换算(1)弧度制与角度制下的一些特殊角①角度制下零度的角:00,弧度制下零度的角:0rad , 区别数值相同,单位不同 ②角度制下平角:0180,弧度制下平角:πrad ③角度制下周角:0360,弧度制下平角:2πrad (2)弧度制与角度制的换算①角度化成弧度:=0360 π2 ,0180 π2 ,01 01745.0 ②弧度化成角度:π2 0360 ,π 0180 ,rad 1 '01857 注:角度和弧度互化9.扇形的弧长公式和面积公式(1)角度制下扇形的弧长公式:180Rn l π=;扇形的面积公式:3602R n S π=(2)弧度制下扇形的弧长公式:R l α=;扇形的面积公式:Rl R S 21212==α10.角度制下和弧度制下轴线角和象限角的集合 (1)轴线角的集合①终边在x 轴的非负半轴上{}Z k k x x ∈⋅=,3600={}Z k k x x ∈=,2π②终边在x 轴的非正半轴上{}Z k k x x ∈+⋅=,18036000={}Z k k x x ∈+=,2ππ ③终边在x 轴上{}Z k k x x ∈⋅=,1800={}Z k k x x ∈=,π④终边在y 轴的非负半轴上{}Z k k x x ∈+⋅=,9036000={}Z k k x x ∈=,2π ⑤终边在y 轴的非正半轴上{}Z k k x x ∈-⋅=,9036000={}Z k k x x ∈+=,2ππ⑥终边在y 轴上{}Z k k x x ∈+⋅=,9018000=⎭⎬⎫⎩⎨⎧∈+=Z k k x x ,2ππ⑦终边在坐标轴上{}Z k k x x ∈⋅=,900=⎭⎬⎫⎩⎨⎧∈=Z k k x x ,2π (2)象限角的集合①第一象限角的集合{}Z k k x k x ∈+⋅<<⋅,90360360000=⎭⎬⎫⎩⎨⎧∈+<<Z k k x k x ,222πππ②第二象限角的集合{}Z k k x k x ∈+⋅<<+⋅,180360903600000=⎭⎬⎫⎩⎨⎧∈+<<+Z k k x k x ,222ππππ③第三象限角的集合{}Z k k x k x ∈+⋅<<+⋅,2703601803600000=⎭⎬⎫⎩⎨⎧∈+<<+Z k k x k x ,2322ππππ④第四象限角的集合{}Z k k x k x ∈+⋅<<+⋅,3603602703600000=⎭⎬⎫⎩⎨⎧∈+<<+Z k k x k x ,22232ππππ ={}Z k k x k x ∈⋅<<-⋅,36090360000=⎭⎬⎫⎩⎨⎧∈<<-Z k k x k x ,222πππ11.两角的终边对称结论(1)α与β的终边关于x 轴对称Z k k ∈=+,2πβα (2)α与β的终边关于y 轴对称Z k k ∈+=+,2ππβα (3)α与β的终边关于原点轴对称Z k k ∈++=,2ππβα (4)α与β的终边共线Z k k ∈+=,πβα(5)α与β的终边关于直线x y =对称Z k k ∈+=+,22ππβα(6)α与β的终边关于直线x y -=对称Z k k ∈+=+,232ππβα (7)α与β的终边互相垂直Z k k ∈++=,2ππβα12.三角函数定义:(1)任意角的三角函数定义1:设角α的顶点与原点重合,始边与x 轴的非负半轴重合,角α的终边上任意一点P 的坐标为),(y x ,它到原点的距离022>+=y x r ,则 ①比值r y 叫做角α的正弦,记作αsin ,即=αsin r y ②比值r x 叫做角α的余弦,记作αcos ,即=αcos r x ③比值x y 叫做角α的正切,记作αtan ,即=αtan x y ④比值y x 叫做角α的余切,记作αcot ,即=αcot yx (2)任意角的三角函数定义2:设角α的顶点与原点重合,始边与x 轴的非负半轴重合,角α的终边与单位圆的交点为P ),(y x ,则 ①=αsin y ②αcos x ③=αtan xy④=αcot y x三角函数都是以角为自变量,以比值为函数值的函数,又由于角与实数是一一对应的,所以三角函数也可以看作是以实数为自变量的函数13.三角函数的定义域和值域三角函数定义域值域αsin =yR ]1,1[- αcos =y R]1,1[-αtan =y⎭⎬⎫⎩⎨⎧∈+≠Z k k x x ,2ππR αcot =y{}Z k k x x ∈≠,πR14.三角函数值在各象限的符号αsin αcos αtan记法1:正弦上正,余弦右正,正切一三正 记法2:一全正,二正弦,三正切,四余弦 15.诱导公式:公式一:终边相同的角的同一三角函数值相等角度制下 弧度制下=+⋅)360sin(0αk αsin =+)2sin(απk αsin =+⋅)360cos(0αk αcos =+)2cos(απk αcos =+⋅)360tan(0αk αtan =+)2tan(απk αtan =+⋅)360cot(0αk αcot =+)2cot(απk αcot公式二:角度制下 弧度制下=+)180sin(0ααsin - =+)sin(απαsin - =+)180cos(0ααcos - =+)cos(απαcos - =+)180tan(0ααtan =+)tan(απαtan =+)180cot(0ααcot =+)cot(απαcot公式三:角度制下 弧度制下=-)180sin(0ααsin =-)sin(απαsin =-)180cos(0ααcos - =-)cos(απαcos - =-)180tan(0ααtan - =-)tan(απαtan - =-)180cot(0ααcot - =-)cot(απαcot -公式四:角度制下 弧度制下=-)sin(ααsin - =-)sin(ααsin - =-)cos(ααcos =-)cos(ααcos =-)tan(ααtan - =-)tan(ααtan - =-)cot(ααcot - =-)cot(ααcot -公式五:角度制下 弧度制下=-)90sin(0ααcos =-)2sin(απαcos=-)90cos(0ααsin =-)2cos(απαsin-)90tan(0ααcot =-)2tan(απαcot=-)90cot(0ααtan =-)2cot(απαtan公式六:角度制下 弧度制下=+)90sin(0ααcos =+)2sin(απαcos=+)90cos(0ααsin - =+)2cos(απαsin -=+)90tan(0ααtan - =+)2tan(απαtan -=+)90cot(0ααcot - =+)2cot(απαcot -公式七:角度制下 弧度制下=+)270sin(0ααcos - =+)23sin(απαcos -=+)270cos(0ααsin =+)23cos(απαsin=+)270tan(0ααcot - =+)23tan(απαcot -=+)270cot(0ααtan - =+)23cot(απαtan -公式八:角度制下 弧度制下=-)270sin(0ααcos - =-)23sin(απαcos -=-)270cos(0ααsin - =-)23cos(απαsin -=-)270tan(0ααcot =-)23tan(απαcot=-)270cot(0ααtan - =-)23cot(απαtan -记忆口诀:奇变偶不变符号看象限 16.部分特殊角的三角函数:αcos21 22 23 1αtan/3-1-33- 017.三角函数线:(1)有向线段:当角α的终边不在坐标轴上时,我们把MP 、OM 、AT 都看成带有方向的线段,这种带方向的线段叫有向线段规定:与坐标轴相同的方向为正方向(2)这几条与单位圆有关的有向线段MP 、OM 、AT 分别叫做角α的正弦线、余弦线、正切线,统称为三角函数线注:(1)正弦线、余弦线、正切线分别解释了正弦函数x y sin =,余弦函数x y cos =、正切函数x y tan =的几何意义(2)正弦线、余弦线、正切线的方向与坐标轴正方向相同时,对应的三角函数值为正,与坐标轴正方向相反时,对应的三角函数值为负 18.同角三角函数的关系:(1)平方关系:1cos sin 22=+αα (2)商数关系:=αtan ααcos sin 、=αcot ααsin cos (3)倒数关系:1cot tan =αα 注意公式的变形:(1)1cos sin 22=+x x ⇒x x 22cos 1sin -=、x x 22sin 1cos -= (2)⇒=αααcos sin tan =αsin ααcos tan 、⇒=αααsin cos cot =αcos ααsin cot (3)ααααααcos sin ,cos sin ,cos sin -+的关系:①=+2)cos (sin ααααcos sin 21+ ②=-2)cos (sin ααααcos sin 21- ③=-++22)cos (sin )cos (sin αααα219.正弦函数x y sin =、余弦函数x y cos =、正切函数x y tan =的图像和性质 函数x y sin = x y cos = x y tan =图形定义域 RR⎭⎬⎫⎩⎨⎧∈+≠Z k k x x ,2ππ值域]1,1[-]1,1[-R最值当Z k k x ∈+=,22ππ时,有最大值当Z k k x ∈-=,22ππ时,有最大值当Z k k x ∈=,2π时,有最大值当Z k k x ∈+=,22ππ时,有最大值无最大值无最小值单调性在Zk k k ∈+-],22,22[ππππ上递增在Zk k k ∈++],232,22[ππππ上递减在Z k k k ∈-],2,2[πππ上递增在Z k k k ∈+],2,2[πππ上递减在Zk k k ∈+-),2,2(ππππ上递增奇偶性 奇函数偶函数奇函数周期性π2=Tπ2=Tπ=T 对称性关于Z k k x ∈+=,2ππ对称关于点Z k k ∈),0,(π中心对称关于Z k k x ∈=,π对称 关于点Zk k ∈+),0,2(ππ中心对称关于点Z k k ∈),0,2(π中心对称20.三角函数周期结论(1)函数B x A y ++=)sin(ϕω(其中0,≠ωA )的周期=T ωπ2函数B x A y ++=)cos(ϕω(其中0,≠ωA )的周期=T ωπ2函数)tan(ϕω+=x A y (其中0,≠ωA )的周期=T ωπ (2)函数)sin(ϕω+=x A y (其中0,≠ωA )的周期=T ωπ 函数)cos(ϕω+=x A y (其中0,≠ωA )的周期=T ωπ 函数)tan(ϕω+=x A y (其中0,≠ωA )的周期=T ωπ (3)函数B x A y ++=)sin(ϕω(其中0,,≠B A ω)的周期=T ωπ2函数B x A y ++=)cos(ϕω(其中0,,≠B A ω)的周期=T ωπ221.函数B x A y ++=)sin(ϕω)0,0(>>ωA 的图像的作法(1)图像变换法:函数B x A y ++=)sin(ϕω的图像可由正弦函数x y sin =经过一系列的变换得到:①先平移变换,再周期变换:x y sin =———————————→)sin(ϕ+=x y —————————→)sin(ϕω+=x y——————————→)sin(ϕω+=x A y ——————————→B x A y ++=)sin(ϕω ②先周期变换,再平移变换:x y sin =———————————→)sin(x y ω=——————————→)sin(ϕω+=x y——————————→)sin(ϕω+=x A y ——————————→B x A y ++=)sin(ϕω (2)五点作图法:函数B x A y ++=)sin(ϕω的图像画法:一个周期内起关键作用的五个点的横坐标可由=+ϕωx ππππ2,23,,2,0得到 22.函数变换结论: (1)平移变换01左右平移:①将函数)(x f y =的图象向左移a 个单位得函数)(a x f y +=的图象 ②将函数)(x f y ω=的图象向左移a 个单位得函数))((a x f y +=ω的图象02上下平移:将函数)(x f y =的图象向上移b 个单位得函数b x f y +=)(的图象(2)伸缩变换①函数)(x f y ω=的图象可由函数)(x f y =的图象上每一点的纵坐标不变,横坐标变为原来的ω1倍得到 ②函数)(x Af y =的图象可由函数)(x f y =的图象上每一点的横坐标不变,纵坐标变为原来的A 倍得到 (3)翻折变换①函数)(x f y =的图象可将函数)(x f y =的图像y 轴右侧的图像保留,y 轴左侧的图像由y 轴右侧的图像沿y 轴翻折得到②函数)(x f y =的图象可将函数)(x f y =的图像在x 轴上方的图像保留,x 轴下方的图像沿x 轴翻折到x 轴上方得到 23.两个函数的对称性结论(1)函数)(x f y -=与)(x f y =的图象关于x 轴对称 (2)函数)(x f y -=与)(x f y =的图象关于y 轴对称 (3)函数)(x f y --=与)(x f y =的图象关于原点对称 (4)函数)(1x fy -=与)(x f y =的图象关于x y =对称(5)函数)2(x a f y -=与)(x f y =的图象关于a x =对称(6)函数)2(x a f y --=与)(x f y =的图象关于点)0,(a 对称24.函数)sin(ϕω+=x A y 和)cos(ϕω+=x A y )0,0(>>ωA 的奇偶性结论 (1)函数)sin(ϕω+=x A y 为奇函数⇔Z k k ∈=,πϕ(2)函数)sin(ϕω+=x A y 为偶函数⇔Z k k ∈+=,2ππϕ(3)函数)cos(ϕω+=x A y 为奇函数⇔Z k k ∈+=,2ππϕ(4)函数)cos(ϕω+=x A y 为偶函数⇔Z k k ∈=,πϕ 二、三角变换25.两角和与差的正弦余弦正切公式:(1)=+)sin(βαβαβαsin cos cos sin +,记作)(βα+ S (2)=-)sin(βαβαβαsin cos cos sin -,记作)(βα- S (3)=+)cos(βαβαβαsin sin cos cos -,记作)(βα+C (4)=-)cos(βαβαβαsin sin cos cos +,记作)(βα-C (5)=+)tan(βαβαβαtan tan 1tan tan -+,记作)(βα+T(6)=-)tan(βαβαβαtan tan 1tan tan +-,记作)(βα-T26.二倍角的正弦、余弦、正切公式 (1)=α2sin ααcos sin 2(2)=α2cos αα22sin cos -=1cos 22-α=α2sin 21-(3)=α2tan αα2tan 1tan 2- 注:二倍角公式的变形:(1)=+2)cos (sin ααααcos sin 21+;=-2)cos (sin ααααcos sin 21-(2)升幂缩角公式:=+αcos 12cos 22α;=-αcos 12sin 22α(3)降幂扩角公式:=α2sin 22cos 1α-;=α2cos 22cos 1α+ =α2sin 2α2cos 1-;=α2cos 2α2cos 1+27.半角公式:(1) =2sinα22cos 1α-±=2cosα22cos 1α+±=2tanααα2cos 12cos 1+-±(2)=2tanαααsin cos 1-=ααcos 1sin +28.辅助角公式: (1)=+θθcos sin b a )sin(22ϕ++x b a ,其中=ϕsin 22b a b +,=ϕcos 22b a a +(2)=+θθcos sin b a )cos(22ϕ-+x b a ,其中=ϕsin 22ba a +,=ϕcos 22ba b +29.万能公式=α2sin αα2tan 1tan 2+ =α2cos αα22tan 1tan 1+- =α2tan αα2tan 1tan 2- 30.积化和差公式=βαcos sin )]sin()[sin(21βαβα-++=βαsin cos )]sin()[sin(21βαβα--+ =βαcos cos )]cos()[cos(21βαβα-++ =βαsin sin )]cos()[cos(21βαβα--+-31.和差化积公式=+βαsin sin 2cos2sin2βαβα-+=-βαsin sin 2sin2cos2βαβα-+=+βαcos cos 2cos2cos2βαβα-+=-βαcos cos 2sin2sin2βαβα-+-。

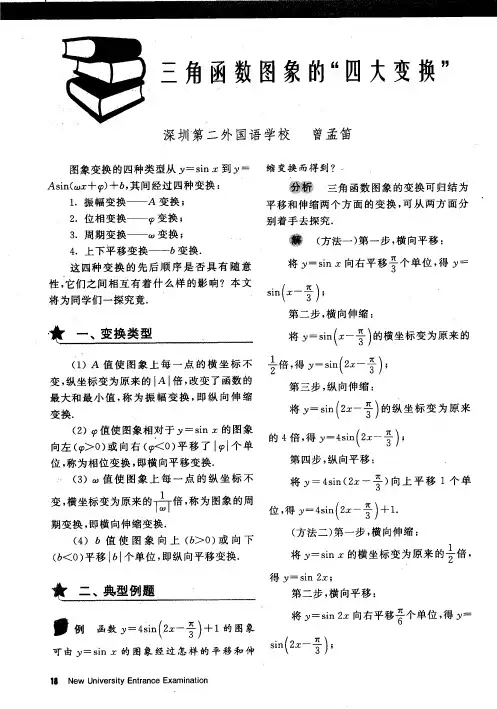
《图象变换的顺序寻根》题根研究一、图象变换的四种类型从函数y = f (x)到函数y = A f ( )+ m,其间经过 4 种变换:1.纵向平移——m 变换2.纵向伸缩—— A 变换3.横向平移——变换4.横向伸缩——变换一般说来,这 4 种变换谁先谁后都没关系,都能达到目标,只是在不同的变换顺序中,“变换量”可不尽相同,解题的“风险性”也不一样.以下以y = sin x 到y = Asin ( )+m 为例,讨论 4 种变换的顺序问题.【例1】函数的图象可由y = sin x 的图象经过怎样的平移和伸缩变换而得到?【解法1】第1 步,横向平移:将y = sin x 向右平移,得第2 步,横向伸缩:将的横坐标缩短倍,得第3 步:纵向伸缩:将的纵坐标扩大 3 倍,得第4 步:纵向平移:将向上平移1,得【解法2】第1 步,横向伸缩:将y = sin x 的横坐标缩短倍,得y = sin 2x第2 步,横向平移:将y = sin 2x 向右平移,得第3 步,纵向平移:将向上平移,得第4 步,纵向伸缩:将的纵坐标扩大 3 倍,得【说明】解法 1 的“变换量”(如右移)与参数值()对应,而解法 2 中有的变换量(如右移)与参数值()不对应,因此解法 1 的“可靠性”大,而解法 2 的“风险性”大.【质疑】对以上变换,提出如下疑问:(1)在两种不同的变换顺序中,为什么“伸缩量”不变,而“平移量”有变?(2)在横向平移和纵向平移中,为什么它们增减方向相反——如当<0 时对应右移(增方向),而m < 0 时对应下移(减方向)?(3)在横向伸缩和纵向伸缩中,为什么它们的缩扩方向相反——如| | > 1 时对应着“缩”,而| A | >1 时,对应着“扩”?【答疑】对于(2),(3)两道疑问的回答是:这是因为在函数表达式y = A f ( )+m 中x 和y 的地位在形式上“不平等”所至. 如果把函数式变为方程式(y+ ) = f ( ),则x、y 在形式上就“地位平等”了.如将例 1 中的变成它们的变换“方向”就“统一”了.对于疑问(1):在不同的变换顺序中,为什么“伸缩量不变”,而“平移量有变”?这是因为在“一次”替代:x→中,平移是对x 进行的.故先平移(x→)对后伸缩(→)没有影响;但先收缩(x→)对后平移(→)却存在着“平移”相关. 这就是为什么(在例 1 的解法 2 中)后平移时,有的原因.【说明】为了使得 4 种变换量与 4 个参数(A,,,m)对应,降低“解题风险”,在由sinx 变到Asin ( ) ( > 0) 的途中,采用如下顺序:(1)横向平移:x→(2)横向伸缩:x+ →(3)纵向伸缩:sin ( ) →Asin ( )(4)纵向平移:Asin ( ) →Asin ( ) + m这正是例 1 中解法 1 的顺序.二、正向变换与逆向变换如果把由sin x 到Asin ( )+m 的变换称作正向变换,那么反过来,由Asin ( )+m 到sin x 变换则称逆向变换.显然,逆向变换的“顺序”是正向变换的“逆”.因为正向变换的一般顺序是:(1)横向平移,(2)横向伸缩,(3)纵向伸缩,(4)纵向平移.所以逆向变换的一般顺序则是:(1)纵向平移,(2)纵向伸缩,(3)横向伸缩,(4)横向平移.如将函数y= 2sin (2 -) +1 的图像下移 1 个单位得y=2sin (2 x-),再将纵坐标缩小一半得y= sin(2 x-),再将横坐标扩大 2 倍得y= sin( x-),最后将图象左移得函数y= sinx.2 x.【例2】将y = f (x)·cos x 的图象向右平移, 再向上平移1, 所得的函数为y=2sin试求 f ( x)的表达式.【分析】这是图象变换的逆变换问题:已知函数的变换结果,求“原函数”. 我们考虑将“正向变换”的过程倒逆回去而得“逆向变换”的顺序.2【解析】将y = 2sin x下移1 个单位(与正向变换上移 1 个单位相反),得y = 2sin 2 2x-1,再将2sin x-1 左移(与正向变换右移相反)得令 f (x)·cos x = 2sin x cos x 得 f (x) = 2sin x2x,其逆【说明】由此得原函数为y=f(x)cosx=2 sin x cosx=sin2 x. 正向变换为s in 2x→2sin 2x→sin2x. 变换为2sin2sin2x=1+sin(2 x-),所以下移 1 个单位得sin(2 x-),左移得sin2 x.因为三、翻折变换使> 0.忽略平移变换x→是“对x 而言”,由于x过于简单而易被里x 的系数是+1. 千万不要误以为是由sin( - x)左移而得.强调一下,这于y 其实,x 或y 的系数变- 1,也对应着两种不同的图象变换:由x→- x 对应着关于x 轴的对称变换,即沿x 轴变换,即沿y 轴的翻折变换;由 f (x) →- f (x)对应着关轴的对称的翻折变换.【例3】求函数的单调减区间.【分析】先变换- 3x→3x,即沿y 轴的翻折变换.【解析1】,转化为求g(x)=sin(3 x-) 的增区间令≤≤≤x ≤(f(x)减区间主解),故函数f(x)减区间的通解为又函数的f(x)周期为≤x ≤【解析2】的减区间为≤≤即是≤x ≤,比较解析 1 和解析 2 可知,求f(x)的减区间,实际上分问题度看【说明】从图象变换的角两步进行:(1)先求得f(x)减区间的主解≤x ≤(2)再利用主解进行横向平移(的整数倍)即得f(x)减区间的通解.【思考】本解先将“正数化”,使>0 是本解成功的关键.否则,如果去解不等式组将会使你陷入歧途,不防试试!。
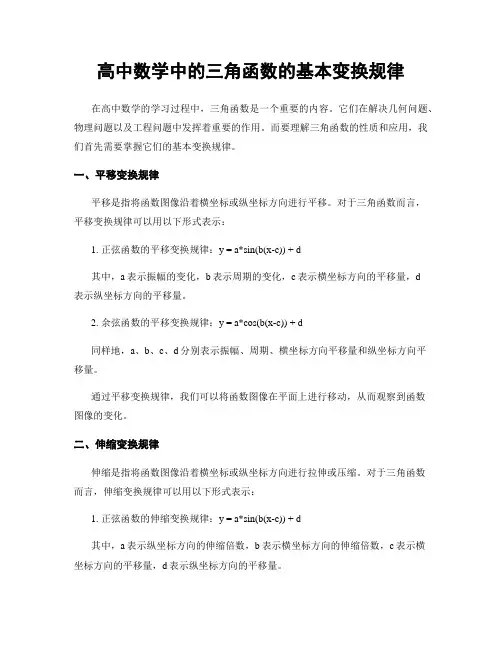
高中数学中的三角函数的基本变换规律在高中数学的学习过程中,三角函数是一个重要的内容。
它们在解决几何问题、物理问题以及工程问题中发挥着重要的作用。
而要理解三角函数的性质和应用,我们首先需要掌握它们的基本变换规律。
一、平移变换规律平移是指将函数图像沿着横坐标或纵坐标方向进行平移。
对于三角函数而言,平移变换规律可以用以下形式表示:1. 正弦函数的平移变换规律:y = a*sin(b(x-c)) + d其中,a表示振幅的变化,b表示周期的变化,c表示横坐标方向的平移量,d表示纵坐标方向的平移量。
2. 余弦函数的平移变换规律:y = a*cos(b(x-c)) + d同样地,a、b、c、d分别表示振幅、周期、横坐标方向平移量和纵坐标方向平移量。
通过平移变换规律,我们可以将函数图像在平面上进行移动,从而观察到函数图像的变化。
二、伸缩变换规律伸缩是指将函数图像沿着横坐标或纵坐标方向进行拉伸或压缩。
对于三角函数而言,伸缩变换规律可以用以下形式表示:1. 正弦函数的伸缩变换规律:y = a*sin(b(x-c)) + d其中,a表示纵坐标方向的伸缩倍数,b表示横坐标方向的伸缩倍数,c表示横坐标方向的平移量,d表示纵坐标方向的平移量。
2. 余弦函数的伸缩变换规律:y = a*cos(b(x-c)) + d同样地,a、b、c、d分别表示纵坐标方向的伸缩倍数、横坐标方向的伸缩倍数、横坐标方向平移量和纵坐标方向平移量。
通过伸缩变换规律,我们可以观察到函数图像在平面上的形状发生变化,从而更好地理解函数的性质。
三、反射变换规律反射是指将函数图像沿着横坐标或纵坐标方向进行镜像。
对于三角函数而言,反射变换规律可以用以下形式表示:1. 正弦函数的反射变换规律:y = -a*sin(b(x-c)) + d其中,a表示振幅的变化,b表示周期的变化,c表示横坐标方向的平移量,d表示纵坐标方向的平移量。
2. 余弦函数的反射变换规律:y = -a*cos(b(x-c)) + d同样地,a、b、c、d分别表示振幅、周期、横坐标方向平移量和纵坐标方向平移量。
三角函数变换公式三角函数是初等数学中的重要概念,在许多数学和科学领域中都有广泛的应用。
在三角函数中,最常见的函数包括正弦函数、余弦函数和正切函数,它们都具有周期性和较为规律的变化。
然而,在实际应用中,有时我们需要对三角函数进行一些变换,以适应特定的需求。
这些变换包括平移、伸缩和反转等操作,可以使得函数图像更加灵活和有用。
一、平移变换平移变换是指在函数图像中将其整个图像沿横轴或纵轴方向平移一定距离。
平移变换可以改变函数图像的位置,使其整体向左或向右移动,或者向上或向下移动。
1.横向平移:设函数f(x)的图像为y=f(x),将其沿横轴方向平移h个单位,得到函数g(x)=f(x-h)。
根据平移的定义,可知g(x)的图像在x轴上的任意点P(x,y)的坐标变为P(x+h,y)。
因此,横向平移后的函数g(x)相当于在f(x)的图像上每个点向右平移h个单位。
2.纵向平移:设函数f(x)的图像为y=f(x),将其沿纵轴方向平移k个单位,得到函数g(x)=f(x)+k。
根据平移的定义,可知g(x)的图像在y轴上的任意点P(x,y)的坐标变为P(x,y+k)。
因此,纵向平移后的函数g(x)相当于在f(x)的图像上每个点向上平移k个单位。
二、伸缩变换伸缩变换是指将函数图像在横轴或纵轴方向进行拉伸或压缩。
伸缩变换可以改变函数图像的形状和走向,使其更加符合实际情况或数学要求。
1.横向伸缩:设函数f(x)的图像为y=f(x),将其沿横轴方向进行伸缩,得到函数g(x)=f(kx)。
根据伸缩的定义,可知g(x)的图像在x轴上的任意点P(x, y)的坐标变为P(x/k, y)。
因此,横向伸缩后的函数g(x)相当于在f(x)的图像上每个点的横坐标缩小k倍。
2.纵向伸缩:设函数f(x)的图像为y=f(x),将其沿纵轴方向进行伸缩,得到函数g(x)=kf(x)。
根据伸缩的定义,可知g(x)的图像在y轴上的任意点P(x, y)的坐标变为P(x, ky)。
三角函数角的变换总结三角函数是数学中重要的一部分,它们能够描述直角三角形中的各种关系以及周期性现象。
三角函数角的变换是指将一个角按照一定的规律进行平移、伸缩、翻转等操作,得到新的角。
这些变换可以帮助我们更好地理解三角函数的性质、图像以及应用。
一、平移变换平移变换是指将角按照一定的规律在坐标平面上沿着横轴或者纵轴进行移动。
平移变换可以通过改变角的坐标来实现。
具体来说,设原始角为θ,平移后的角为θ+a。
对于三角函数来说,平移变换的规律如下:1. 正弦函数的平移变换:y = sin(θ+a) = sinθcosa + sinacosθ平移量a的正负方向决定了平移的方向,平移量a的大小决定了平移的距离。
2. 余弦函数的平移变换:y = cos(θ+a) = cosθcosa - sinasina平移量a的正负方向决定了平移的方向,平移量a的大小决定了平移的距离。
3. 正切函数的平移变换:y = tan(θ+a) = (tanθ + tana) / (1 - tanθtanα)平移量a的正负方向决定了平移的方向,平移量a的大小决定了平移的距离。
二、伸缩变换伸缩变换是指将角按照一定的规律进行拉伸或者收缩操作。
伸缩变换可以通过改变角度的系数来实现。
具体来说,设原始角为θ,伸缩后的角为kθ。
对于三角函数来说,伸缩变换的规律如下:1. 正弦函数的伸缩变换:y = sin(kθ) = sinθ / k伸缩系数k大于1时,表示角度增加,图像上下收缩;伸缩系数k小于1时,表示角度减小,图像上下拉伸。
2. 余弦函数的伸缩变换:y = cos(kθ) = cosθ / k伸缩系数k大于1时,表示角度增加,图像左右收缩;伸缩系数k小于1时,表示角度减小,图像左右拉伸。
3. 正切函数的伸缩变换:y = tan(kθ) = tanθ / k伸缩系数k大于1时,表示角度增加,图像上下收缩;伸缩系数k小于1时,表示角度减小,图像上下拉伸。
高二数学三角函数的平移与伸缩变换高二数学:三角函数的平移与伸缩变换三角函数是数学中重要的概念之一,掌握其基本性质,特别是平移与伸缩变换,对于解题和理解函数图像有着重要的作用。
本文将详细介绍高二数学中三角函数的平移与伸缩变换的相关知识。
一、平移变换平移变换是指将函数的图像整体移动到不同位置的操作。
以正弦函数为例,若将其向右平移c个单位,则函数的表示形式为y=sin(x-c)。
平移的基本原理是通过改变函数中自变量x的值,使得整个函数的图像沿x轴平移。
具体来说,若函数原本在点(x,y)上取值,在平移后,将在点(x+c,y)上取值。
平移变换的特点是不改变函数的周期,只改变其相位差。
在正弦函数中,相位差指的是函数图像与正弦曲线在x轴上的交点的水平距离。
通过平移变换,相位差可以通过改变c的值来调整。
二、伸缩变换伸缩变换是指将函数的图像进行纵向或横向的拉伸或压缩操作。
纵向伸缩的表示形式为y=a*sin(x),其中a为正实数。
当a>1时,函数图像纵向拉伸;当0<a<1时,函数图像纵向压缩。
横向伸缩的表示形式为y=sin(ax),其中a为正实数。
当a>1时,函数图像横向压缩;当0<a<1时,函数图像横向拉伸。
伸缩变换的基本原理是通过改变函数中自变量x的值,使得函数的周期发生改变。
在正弦函数中,周期指的是函数图像中两个相邻正弦波之间的最短距离。
通过伸缩变换,周期可以通过改变a的值来调整。
三、平移与伸缩的综合应用在实际问题中,平移与伸缩常常同时存在,需要综合应用这两种变换。
对于正弦函数来说,若先进行平移变换,再进行纵向伸缩变换,表示形式为y=a*sin(x-c)。
其中,a为正实数,表示纵向伸缩的参数;c为正实数,表示平移的距离。
对于横向伸缩来说,同样可以与平移变换综合使用。
表示形式为y=sin(ax-c)。
然而需要注意的是,此时的参数a与之前的表示方式不同,需要将其倒数代入,即a=1/b,其中b为正实数。
三角函数图像变换总结三角函数图像变换总结篇一:三角函数图像变换小结(修订版) ★三角函数图像变换小结★相位变换:①y?sinx?y?si n(x??)0? 将y?sinx图像沿x轴向左平移?个单位②y?s inx?y?sin(x??)0?将y?sinx图像沿x轴向右平移?个单位周期变换:①y?sinx?y?sinx(0??1)将y?sinx图像上所有点的纵坐标不变,横坐标伸长为原来的 1 倍②y?sinx?y?si nx(?1)将y?s inx图像上所有点的纵坐标不变,横坐标缩短为原来的 1 倍振幅变换:①y?sinx?y?A sinx的A倍②y?sinx?y?Asinx A倍?0?纵坐标缩短为原来A?1?将y?si nx图像上所有点的横坐标不变, ?A?1?将y?sinx图像上所有点的横坐标不变,纵坐标伸长为原来的【特别提醒】由y=sinx的图象变换出y =Asin(?x+?)的图象一般有两个途径,只有区别开这两个途径,才能灵活进行图象变换。
途径一:先平移变换再周期变换(伸缩变换) 先将y=sinx的图象向左(?>0)或向右(??0)平移|?|个单位,再将图象上各点的横坐标变为原来的途径二:先周期变换(伸缩变换)再平移变换先将y=sinx的图象上各点的横坐标变为原来的移 |?| 1? 倍(?>0),便得y=sin(ωx+?)的图象 1 ?倍(?>0),再沿x轴向左(?>0)或向0?右平 ?个单位,便得y=si n(?x+?)的图象 ?? |个单位【特别提醒】若由y?s in?x 得到y?si n??x的图象,则向左或向右平移应平移| 1 为了得到函数y?3sin?x? ?? ?? 5? ?的图像,只要把y?3sin?x? ? ? ?? ?上所有的点() 5? (A)向右平行移动(C)向右平行移动 ?52?5 个单位长度(B)向左平行移动个单位长度(D)向左平行移动 ? 52?5 个单位长度个单位长度(201X·朝阳期末)要得到函数y?sin(2x?(A)向左平移(C)向右平移 (09山东文)将函数y?sin2x的图象向左平移( ). ? 4 ?4 )的图象,只要将函数y?sin2x的图象 ( ) 单位(B)向右平移单位(D)向左平移 ?4 单位单位 ?8 ? 8 ? 4个单位, 再向上平移1个单位,所得图象的函数解析式是 A.y?2cs2x B. y?2sin2xC.y?1?sin(2x? 【方法总结】 ? 4 ) D.y?cs2x①将y?f?x?图像沿x轴向左平移a个单位 y?f?x??y?f(x?a)②将y?f(x)图像沿x轴向右平移a个单位 y?f?x??y?f(x?a) 为了得到函数y?3si n?2x? ?? ?? 5? ?的图像,只要把y?3sin?x? ? ? ???上所有的点()5? 1212 (A)横坐标伸长到原来的2倍,纵坐标不变(B)横坐标缩短到原来的(C)纵坐标伸长到原来的2倍,横坐标不变(D)纵坐标缩短到原来的(201X四川文)将函数y?s inx 的图像上所有的点向右平行移动 ?10 倍,纵坐标不变倍,横坐标不变个单位长度,再把所得各点的横坐标伸长到原来的2倍(纵坐标不变),所得图像的函数解析式是()(A)y?sin(2x?(C)y?sin( 2?10 ) (B)y?sin(2x?) (D)y?sin( 12 ? 5 )) 12 x? ? 10 x? ? 20 (201X·广州期末)若把函数y?f?x?的图象沿x轴向左平移 ? 4 个单位,沿y轴向下平移1个单位,然后再把图象上每个点的横坐标伸长到原来的2倍(纵坐标保持不变),得到函数y?sinx的图象,则y?f?x?的解析式为( ) A.y?sin?2x? ??? ???B.?1y?sin2x1 4?2?? C.y?s in?2x? 【方法总结】 ?? ???D.?1y?sin2x1 4?2?? 将y?f?x?图像上所有点的纵坐标不变,横坐标变为原来的y?f(x)?y?f?x 1 倍? (?0) 为了得到函数y?4sin?x? ?? ?? 5? ?的图像,只要把y?3sin?x?? ? ?? ?上所有的点() 5?34 (A)横坐标伸长到原来的(C)纵坐标伸长到原来的【方法总结】 4343倍,纵坐标不变(B)横坐标缩短到原来的倍,纵坐标不变 34倍,横坐标不变(D)纵坐标缩短到原来的倍,横坐标不变将y?f?x?图像上所有点的横坐标不变,横坐标变为原来的A倍y?f(x)?y?A f?x ? (A?0) 为了得到函数y?sin?2x? ???? ?的图像,可以将函数y?cs2x的图像() 6?A 向右平移 ? 6B 向右平移 ?3 C 向左平移?6 D向左平移?3 试述如何由y=sin(2x+ 31π3 )的图象得到y=sinx的图象3 函数y?Asin(?x??)表达式的确定:A由最值确定;?由周期确定;?由图象上的特殊点确定,(201X重庆理)(6)已知函数y?sin(?x??)(??0,??A. ?=1 ?= ? 6 ? 2 )的部分图象如题(6)图所示,则() ? 6 B. ?=1 ?= —C.?=2 ?= ? 6? 6 D. ?=2 ?= —(201X天津文)(8)右图是函数y?Asin(?x??)?A?0,??0,?? ?? ?? 2? ?在区间?? ? ??5?? 上的图像为?66?, 了得到这个函数的图象,只要将y?sinx(x?R)的图象上所有的点() (A)向左平移? 3 个单位长度,再把所得各点的横坐标缩短到原来的 12倍,纵坐标不变(B) 向左平移 ? 3个单位长度,再把所得各点的横坐标伸长到原来的2 倍,纵坐标不变 (C) 向左平移 ? 6 个单位长度,再把所得各点的横坐标缩短到原来的12 倍,纵坐标不变(D) 向左平移?6 个单位长度,再把所得各点的横坐标伸长到原来的2 倍,纵坐标不变【规律总结】 y?Asin(?x??)的图像(1)相邻的对称轴之间的距离为半个周期;(2)相邻对称中心间的距离是半个周期;(3)相邻的对称轴和对称中心之间的距离为14 个周期。
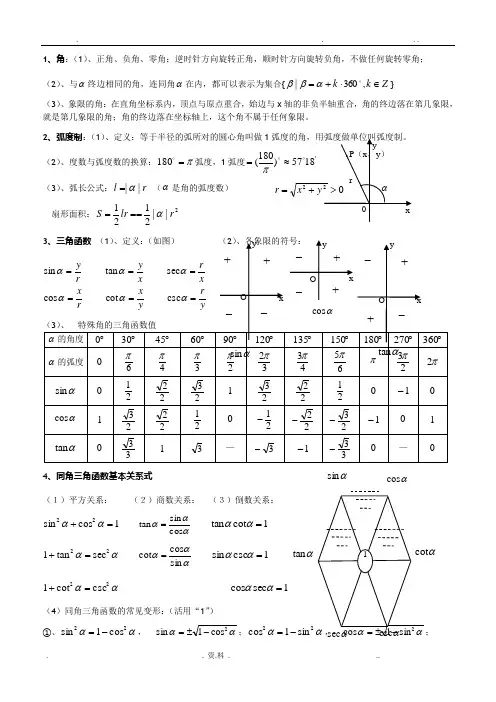
1、角:(1)、正角、负角、零角:逆时针方向旋转正角,顺时针方向旋转负角,不做任何旋转零角; (2)、与α终边相同的角,连同角α在内,都可以表示为集合{Z k k ∈⋅+=,360|αββ}(3)、象限的角:在直角坐标系内,顶点与原点重合,始边与x 轴的非负半轴重合,角的终边落在第几象限,就是第几象限的角;角的终边落在坐标轴上,这个角不属于任何象限。
2、弧度制:(1)、定义:等于半径的弧所对的圆心角叫做1(2)、度数与弧度数的换算:π= 180弧度,1弧度)180( =π(3)、弧长公式:r l ||α= (α是角的弧度数)扇形面积:2||2121r lr S α===4、同角三角函数基本关系式(1)平方关系: (2)商数关系: (3)倒数关系:1cos sin 22=+αα αααcos sin tan = 1cot tan =αα αα22sec tan 1=+ αααsin cos cot =1csc sin =αα αα22csc cot 1=+ 1sec cos =αα(4)同角三角函数的常见变形:(活用“1”) ①、αα22cos 1sin-=, αα2cos 1sin -±=;α22sin 1cos -= =r αsinαcosαtan α②θθθθθθθ2sin 2cos sin sin cos cot tan 22=+=+,αααααααθθ2cot 22sin 2cos 2cos sin sin cos tan cot 22==-=-③ααααα2sin 1cos sin 21)cos (sin 2±=±=±, |cos sin |2sin 1ααα±=± 5、诱导公式:(奇变偶不变,符号看象限)公式一: ααααααtan )360tan(cos )360cos(sin )360sin(=︒⋅+=︒⋅+=︒⋅+k k k 公式二: 公式三: 公式四: 公式五:ααααααtan )180tan(cos )180cos(sin )180sin(-=-︒-=-︒=-︒ ααααααtan )180tan(cos )180cos(sin )180sin(=+︒-=+︒-=+︒ ααααααtan )tan(cos )cos(sin )sin(-=-=--=- ααααααtan )360tan(cos )360cos(sin )360sin(-=-︒=-︒-=-︒ 补充:ααπααπααπcot )2tan(sin )2cos(cos )2sin(=-=-=- ααπααπααπcot )2tan(sin )2cos(cos )2sin(-=+-=+=+ ααπααπααπcot )23tan(sin )23cos(cos )23sin(=--=--=- ααπααπααπcot )23tan(sin )23cos(cos )23sin(-=+=+-=+6、两角和与差的正弦、余弦、正切 7 .辅角公式⎪⎪⎭⎫ ⎝⎛++++=+x b a b x b a a b a x b x a cos sin cos sin 222222 )sin()sin cos cos (sin 2222ϕϕϕ+⋅+=⋅+⋅+=x b a x x b a(其中ϕ称为辅助角,ϕ的终边过点),(b a ,ab =ϕtan ) (多用于研究性质) 8、二倍角公式:(1)、α2S : αααcos sin 22sin = (2)、降次公式:(多用于研究性质)α2C : ααα22sin cos 2cos -= ααα2sin 21cos sin =1cos 2sin2122-=-=αα 212cos 2122cos 1sin 2+-=-=ααα α2T : ααα2tan 1tan 22tan -= 212cos 2122cos 1cos 2+=+=ααα (3)、二倍角公式的常用变形:①、|sin |22cos 1αα=-, |cos |22cos 1αα=+;②、|sin |2cos 2121αα=-,|cos |2cos 2121αα=+ ③22sin 1cos sin 21cos sin 22244ααααα-=-=+; ααα2cos sin cos 44=-;④半角:2cos 12sin αα-±=,2cos 12cos αα+±=,αααcos 1cos 12tan +-±=ααααcos 1sin sin cos 1+=-=9、三角函数的图象性质(1)、函数的周期性:①、定义:对于函数f (x ),若存在一个非零常数T ,当x 取定义域内的每一个值时,都有:f (x +T )= f (x ),那么函数f (x )叫周期函数,非零常数T 叫这个函数的周期;②、如果函数f (x )的所有周期中存在一个最小的正数,这个最小的正数叫f (x )的最小正周期。
三角函数平移伸缩变换公式
三角函数是基本初等函数之一,是以角度为自变量,角度对应任意角终边与单位圆交点坐标或其比值为因变量的函数。
三角函数平移伸缩变换口诀:左加右减,上加下减。
左加右减
一个点作左右平移时,纵坐标不发生任何改变,而是横坐标在发生变化。
当点向右平移时,横坐标变大,当点向左平移时,横坐标变小,这就是平移的左加右减。
上加下减
一个点作上下平移时,横坐标不发生任何改变,而是纵坐标在发生变化。
当点向上平移时,纵坐标变大,当点向下平移时,纵坐标变小,这就是平移的上加下减。
1、角:(1)、正角、负角、零角:逆时针方向旋转正角,顺时针方向旋转负角,不做任何旋转零角; (2)、与α终边相同的角,连同角α在内,都可以表示为集合{Z k k ∈⋅+=,360|οαββ}(3)、象限的角:在直角坐标系内,顶点与原点重合,始边与x 轴的非负半轴重合,角的终边落在第几象限,就是第几象限的角;角的终边落在坐标轴上,这个角不属于任何象限。
2、弧度制:(1)、定义:等于半径的弧所对的圆心角叫做1弧度的角,用弧度做单位叫弧度制。
(2)、度数与弧度数的换算:π=ο180弧度,1弧度)180(ο=π(3)、弧长公式:r l ||α= (α是角的弧度数)扇形面积:2||2121r lr S α===3、三角函数 (1)、定义:(如图) (2)yry x r x xrx y r y ======ααααααcsc cot cos sec tan sin 4、同角三角函数基本关系式(1)平方关系: (2)商数关系: (3)倒数关系:1cos sin 22=+αα αααcos sin tan = 1cot tan =αα αα22sec tan 1=+ αααsin cos cot =1csc sin =αα αα22csc cot 1=+ 1sec cos =αα(4)同角三角函数的常见变形:(活用“1”)①、αα22cos 1sin -=, αα2cos 1sin -±=;αα22sin 1cos -=, αα2sin 1cos -±=;②θθθθθθθ2sin 2cos sin sin cos cot tan 22=+=+,αααααααθθ2cot 22sin 2cos 2cos sin sin cos tan cot 22==-=-xy+ + _ _O xy++__ Oαtanxy+ +__O=r αsec αsinαtan αcotαcsc③ααααα2sin 1cos sin 21)cos (sin 2±=±=±, |cos sin |2sin 1ααα±=± 5、诱导公式:(奇变偶不变,符号看象限)公式一: ααααααtan )360tan(cos )360cos(sin )360sin(=︒⋅+=︒⋅+=︒⋅+k k k公式二: 公式三: 公式四: 公式五:ααααααtan )180tan(cos )180cos(sin )180sin(-=-︒-=-︒=-︒ ααααααtan )180tan(cos )180cos(sin )180sin(=+︒-=+︒-=+︒ ααααααtan )tan(cos )cos(sin )sin(-=-=--=- ααααααtan )360tan(cos )360cos(sin )360sin(-=-︒=-︒-=-︒ 补充:ααπααπααπcot )2tan(sin )2cos(cos )2sin(=-=-=- ααπααπααπcot )2tan(sin )2cos(cos )2sin(-=+-=+=+ ααπααπααπcot )23tan(sin )23cos(cos )23sin(=--=--=- ααπααπααπcot )23tan(sin )23cos(cos )23sin(-=+=+-=+7 .辅角公式 ⎪⎪⎭⎫ ⎝⎛++++=+x b a b x b a a b a xb x a cos sin cos sin 222222 )sin()sin cos cos (sin 2222ϕϕϕ+⋅+=⋅+⋅+=x b a x x b a(其中ϕ称为辅助角,ϕ的终边过点),(b a ,ab =ϕtan ) (多用于研究性质) 8、二倍角公式:(1)、α2S : αααcos sin 22sin = (2)、降次公式:(多用于研究性质) α2C : ααα22sin cos2cos -= ααα2sin 21cos sin =1cos 2sin 2122-=-=αα 212cos 2122cos 1sin 2+-=-=ααα α2T : ααα2tan 1tan 22tan -= 212cos 2122cos 1cos 2+=+=ααα(3)、二倍角公式的常用变形:①、|sin |22cos 1αα=-, |cos |22cos 1αα=+;②、|sin |2cos 2121αα=-, |cos |2cos 2121αα=+③22sin 1cos sin 21cos sin 22244ααααα-=-=+; ααα2cos sin cos 44=-;④半角:2cos 12sin αα-±=,2cos 12cos αα+±=,αααcos 1cos 12tan +-±=ααααcos 1sin sin cos 1+=-=9、三角函数的图象性质 (1)、函数的周期性:①、定义:对于函数f (x ),若存在一个非零常数T ,当x 取定义域内的每一个值时,都有:f (x +T )= f (x ),那么函数f (x )叫周期函数,非零常数T 叫这个函数的周期;②、如果函数f (x )的所有周期中存在一个最小的正数,这个最小的正数叫f (x )的最小正周期。
函数y =A sin(ωx +φ)(A >0,ω>0)图象1用五点法做函数y =A sin(ωx +φ)(A >0,ω>0)的简图2.函数y =A sin(ωx +φ)(A >0,ω>0)图象变换 (1)振幅变换:y =f (x )―→ .y =sin x 的图象的纵坐标伸长 或缩短 到原来的 倍( 坐标不变)得到y =A sin x 的图象. (2)平移变换;y =f (x )―→y = .y =sin x 的图象向左 或向右 平移 个单位得到y =sin(x +φ) 的图象. (3)周期变换:y =f (x )―→ .y =sin x 的图象的 坐标伸长 或缩短到原来的1ω倍,( 坐标不变)得到y =sin ωx 的图象.(4)由y =sin x 的图象得到y =A sin(ωx +φ) 的图象. ①先平移后伸缩y =sin x ――――――→向左平移|φ|(φ>0)向右平移|φ|(φ<0)y =sin(x +φ)――→伸缩变换y =sin(ωx +φ)―→y =A sin(ωx +φ)2.先伸缩后平移3.当函数y =A sin(ωx +φ)(A >0,ω>0,x ∈(0,+∞))表示一个振动量时,A 叫做 ,T =2πω叫做 .f =1T 叫做 ,ωx +φ叫做 ,φ叫做 .4.解题经验1.注意y =A sin(ωx +φ)的图象形状,利用一个周期内起关键作用的五点.2.y =A sin(ωx +φ)的对称中心及对称轴可把ωx +φ看作“整体”.再利用y =sin x 的对称中心及对称轴来求.3.三角函数的单调性,往往把ωx +φ看作整体,运用复合函数的单调性解决.4.图象变换的两种途径的不同,先平移后伸缩是左右平移|φ|个单位,先伸缩后平移是左右平移|φω|个单位1.(2010·惠州二模)将函数y =sin x 的图象向左平移φ(0≤φ≤2π)个单位后,得到函数y =sin(x -π6)的图象,则φ等于( )A.π6B.7π6C.11π6D.5π62.(2010·四川,6)将函数y =sin x 的图象上所有的点向右平行移动π10个单位长度,再把所得各点的横坐标伸长到原来的2倍(纵坐标不变),所得图象的函数解析式是(A .y =sin ⎝ ⎛⎭⎪⎫2x -π10B .y =sin ⎝ ⎛⎭⎪⎫2x -π5C .y =sin ⎝⎛⎭⎪⎫12x -π10D .y =sin ⎝⎛⎭⎪⎫12x -π203.f (x )=1+sin x ,x ∈[0,2π]的图象与直线y =32有____________个交点.题型1:五点画法例1:已知函数y =3sin x 2+cos x2(x ∈R ). (1)用“五点法”画出它的图象; (2)求它的振幅、周期及初相;(3)说明该函数的图象可由y =sin x 的图象经过怎样的变换而得到?[点评与警示] 用“五点法”作图应抓住四条:①化为y =A sin(ωx +φ)(A >0,ω>0)或y =A cos(ωx +φ)(A >0,ω>0)的形式;②求出周期T =2πω;③求出振幅A ;④列出一个周期内的五个特殊点,当画出某指定区间上的图象时,应列出该区间内的特殊点.⑤图象的变换顺序有两种,一是先平移,后伸缩;二是先伸缩,后平移.两者平移量不同,前者横移|φ|个单位,后者是横移|φ|ω个单位.变形思考:将函数y =sin(x -π3)的图象上所有点的横坐标伸长到原来的2倍(纵坐标不变),再将所得的图象向左平移π3个单位,得到的图象对应的解析式是( )A .y =sin 12x B .y =sin(12x -π2) C .y =sin(12x -π6)D .y =sin(2x -π6)题型2:求函数的解析式例2:(2010·广东,16)已知函数f (x )=A sin(3x +φ)(A >0,x ∈(-∞,+∞),0<φ<π)在x =π12时取得最大值4.(1)求f (x )的最小正周期; (2)求f (x )的解析式; (3)若f ⎝ ⎛⎭⎪⎫23α+π12=125,求sin α.题型3:函数y =A sin(ωx +φ)(A >0,ω>0)图象与性质例3:已知f (x )=sin x cos x +3cos 2x +32cos2x +12sin2x -32.(1)求函数f (x )的最小正周期; (2)求函数f (x )的最大值及最小值; (3)写出函数f (x )的单调递增区间; (4)证明f (x )在[-π3,π12]上递增.例4:(2010·北京,15)已知函数f (x )=2cos 2x +sin 2x -4cos x .(1)求f ⎝ ⎛⎭⎪⎫π3的值;(2)求f (x )的最大值和最小值.一、选择题1.(2007·海南、宁夏卷)函数y =sin ⎝ ⎛⎭⎪⎫2x -π3在区间⎣⎢⎡⎦⎥⎤-π2,π的简图是( )2.(2008·全国Ⅰ)为得到函数y =cos(2x +π3)的图象,只需将函数y =sin2x 的图象( )A .向左平移5π12个长度单位 B .向右平移5π12个长度单位 C .向左平移5π6个长度单位D .向右平移5π6个长度单位3.函数f (x )=A sin(ωx +φ)(A >0、ω>0、|φ|<π2)的部分图象如右图所示,则将y =f (x )的图象向右平移π6个单位后,得到的图象解析式为( )A .y =sin2xB .y =cos2xC .y =sin(2x +2π3) D .y =sin(2x -π6)5.(2010·辽宁,5)设ω>0,函数y =sin ⎝ ⎛⎭⎪⎫w x +π3+2的图象向右平移4π3个单位后与原图象重合,则w 的最小值是( )A.23B.43C.32 D .36.(2009·安徽卷)已知函数f (x )=3sin ωx +cos ωx (ω>0),y =f (x )的图象与直线y =2的两个相邻交点的距离等于π,则f (x )的单调递增区间是( )A .[k π-π12,k π+5π12],k ∈Z B .[k π+5π12,k π+11π12],k ∈Z C .[k π-π3,k π+π6],k ∈Z D .[k π+π6,k π+2π3],k ∈Z 二、填空题7.(2008·江苏卷)f (x )=cos(ωx -π6)的最小正周期为π5,其中ω>0,则ω=________.8.设点P 是函数f (x )=sin ωx 的图象C 的一个对称中心,若点P 到图象C 的一条对称轴的距离的最小值π4,则f (x )的最小正周期是________.9.(2007·安徽卷)函数f (x )=3sin ⎝ ⎛⎭⎪⎫2x -π3的图象为C ,如下结论中正确的是________(写出所有正确结论的编号).①图象C 关于直线x =1112π对称; ②图象C 关于点⎝ ⎛⎭⎪⎫2π3,0对称;③函数f (x )在区间⎝ ⎛⎭⎪⎫-π12,5π12内是增函数;④由y=3sin2x的图象向右平移π3个单位长度可以得到图象C.10.(2009·辽宁卷)已知函数f(x)=sin(ωx+φ)(ω>0)的图象如图所示,则ω=________.三、解答题11.(2009·广州调研)已知f(x)=sin x+3cos x(x∈R).(1)求函数f(x)的最小正周期;(2)求函数f(x)的最大值,并指出此时x的值.12.(2009·山东卷)设函数f(x)=cos(2x+π3)+sin2x.(1)求函数f(x)的最大值和最小正周期;(2)设A,B,C为△ABC的三个内角,若cos B=13,f(c2)=-14,且c为锐角,求sin A.。