第1章机构的结构分析
- 格式:ppt
- 大小:1.47 MB
- 文档页数:33
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
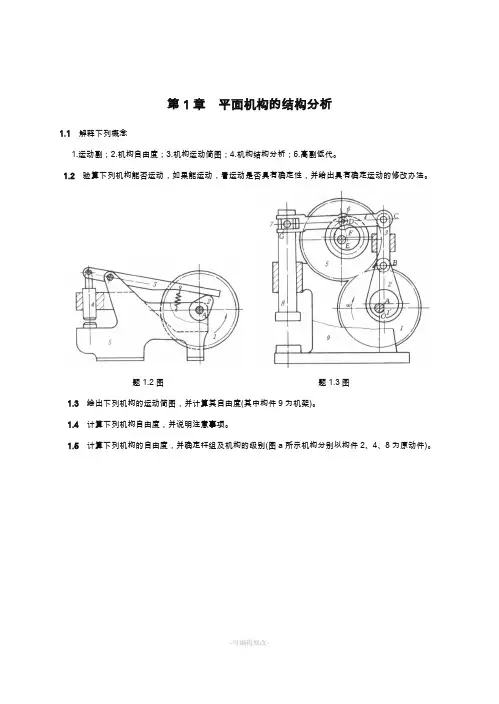
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE =120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
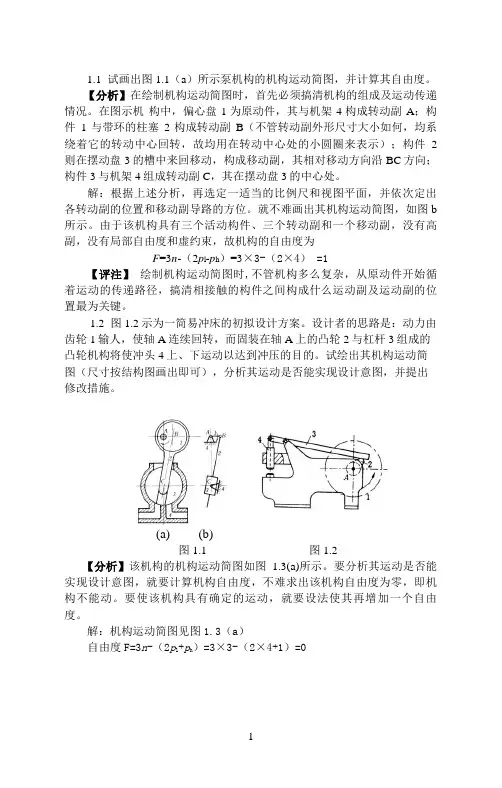
1.1 试画出图1.1(a)所示泵机构的机构运动简图,并计算其自由度。
【分析】在绘制机构运动简图时,首先必须搞清机构的组成及运动传递情况。
在图示机构中,偏心盘1为原动件,其与机架4构成转动副A;构件1与带环的柱塞2构成转动副B(不管转动副外形尺寸大小如何,均系绕着它的转动中心回转,故均用在转动中心处的小圆圈来表示);构件2则在摆动盘3的槽中来回移动,构成移动副,其相对移动方向沿BC方向;构件3与机架4组成转动副C,其在摆动盘3的中心处。
解:根据上述分析,再选定一适当的比例尺和视图平面,并依次定出各转动副的位置和移动副导路的方位。
就不难画出其机构运动简图,如图b 所示。
由于该机构具有三个活动构件、三个转动副和一个移动副,没有高副,没有局部自由度和虚约束,故机构的自由度为F=3n-(2p l-p h)=3×3-(2×4) =1【评注】绘制机构运动简图时,不管机构多么复杂,从原动件开始循着运动的传递路径,搞清相接触的构件之间构成什么运动副及运动副的位置最为关键。
1.2 图1.2示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输人,使轴A连续回转,而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上、下运动以达到冲压的目的。
试绘出其机构运动简图(尺寸按结构图画出即可),分析其运动是否能实现设计意图,并提出修改措施。
(a) (b)图1.1 图1.2【分析】该机构的机构运动简图如图1.3(a)所示。
要分析其运动是否能实现设计意图,就要计算机构自由度,不难求出该机构自由度为零,即机构不能动。
要使该机构具有确定的运动,就要设法使其再增加一个自由度。
解:机构运动简图见图1.3(a)自由度F=3n-(2p l+p h)=3×3-(2×4+1)=0图1.3该简易机床设计方案的机构不能运动。
修改措施:(1)在构件3、4之间加一连杆及一个转动副(图(b)示);(2)在构件3、4之间加一滑块及一个移动副(图(c)示);(3)在构件3、4之间加一局部自由度滚子及一个平面高副(图(d)示);修改措施还可以提出几种,如3杆可利用凸轮轮廓与推杆4接触推动4杆等。
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE=120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
第一章机构的结构分析基本要求:熟练掌握机构运动简图的绘制方法。
能够将实际机构或机构的结构图绘制成机构运动简图;能看懂各种复杂机构的机构运动简图;能用机构运动简图表达自己的设计构思。
掌握运动链成为机构的条件。
熟练掌握机构自由度的计算方法。
能自如地运用自由度计算公式计算机构自由度,尤其是平面机构的自由度。
能准确识别出机构中存在的复合铰链、局部自由度和虚约束,并作出正确处理。
掌握机构的组成原理和结构分析的方法。
了解高副低代的方法;会判断杆组、杆组的级别和机构的级别;学会根据机构组成原理,用基本杆组、原动件和机架创新构思新机构的方法;学会将Ⅱ级、Ⅲ级机构分解为机架、原动件和若干基本杆组的方法。
教学内容:1. 机构的组成2. 机构运动简图3. 运动链成为机构的条件4. 机构的组成原理和结构分析重点难点:机构运动简图的绘制、机构自由度的计算、判断运动链能否成为机构和机构的组成原理是本章学习的重点。
前面两个重点又是学习中的难点和必须正确熟练掌握的内容。
§1-1 研究机构结构的目的研究机构结构的目的:研究机构的组成及机构运动简图的画法;了解机构具有确定运动的条件;研究机构的组成原理及结构分类;按结构分类,建立运动分析和动力分析的一般方法;合理设计机构和创新新机构。
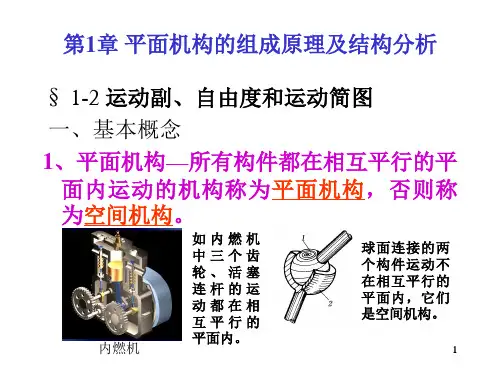
§1-2 平面运动副及其分类一、构件零件:从制造的观点分析机械时,零件是组成机械的最小单元体。
任何机械都由许多零件组合而成的。
如内燃机中的连杆由连杆体、连杆头、轴瓦、螺杆、螺母和轴套等零件组成。
内燃机中的连杆由连杆体、连杆头、轴瓦、螺栓、螺母和轴套等零件组成。
构件:从运动的观点分析机械时,构件是参加运动的最小单元体。
构件可以是一个零件,也可以是由多个零件组成的刚性系统。
二、运动副为了使多个构件组成一个系统后相互之间具有确定的运动,构件与构件需要一种既直接接触又有相对运动的联接,这种联接称为运动副。
运动副:两构件直接接触所形成的可动联接。