机构的结构分析和综合
- 格式:ppt
- 大小:9.10 MB
- 文档页数:79
爬楼越障机器人机构分析与综合研究一、本文概述Overview of this article随着科技的飞速发展和城市建设的日新月异,高楼大厦的维护、救援和侦察等任务对机器人的需求日益增加。
爬楼越障机器人作为一种新型移动机器人,具有在复杂环境中自主导航、越障和爬楼的能力,因此受到了广泛关注。
本文旨在对爬楼越障机器人的机构进行深入的分析与综合研究,以期为该类机器人的设计、优化和应用提供理论支持和实践指导。
With the rapid development of technology and the rapid progress of urban construction, the demand for robots in tasks such as maintenance, rescue, and reconnaissance of high-rise buildings is increasing. As a new type of mobile robot, the obstacle climbing robot has the ability to autonomously navigate, overcome obstacles, and climb buildings in complex environments, thus receiving widespread attention. This article aims to conduct in-depth analysis and comprehensive research on the mechanism of climbing and obstacle crossingrobots, in order to provide theoretical support and practical guidance for the design, optimization, and application of such robots.本文首先介绍了爬楼越障机器人的研究背景和意义,阐述了机器人在高楼维护、救援和侦察等领域的应用价值。
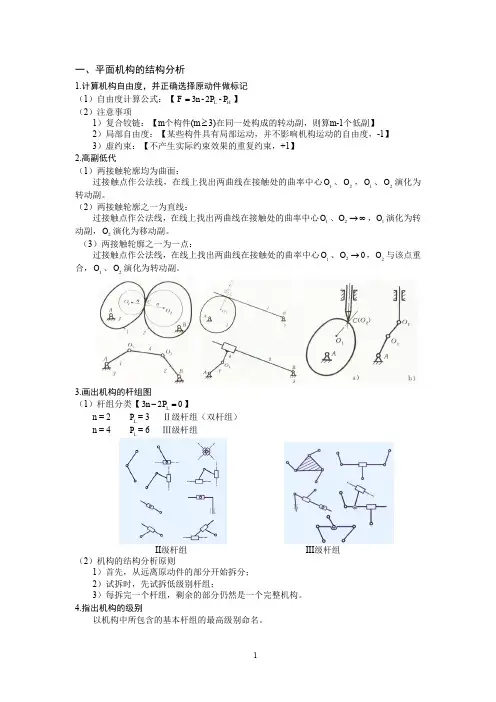
研究机构结构分析和综合的目的如下:(1)研究组成机构的要素及机构具有确定运动的条件,然后判断机构能否运动。
(2) 研究机构的组成原理,并根据结构特点对机构进行分类,以便于对其进行运动分析和力分析。
(3)研究机构运动简图的绘制方法,即研究如何用简单的图形表示机构的结构和运动状态。
(4)研究机构结构综合方法,即研究在满足预期运动及工作条件下,如何综合出机构可能的结构型式及其影响机构运动的结构参数。
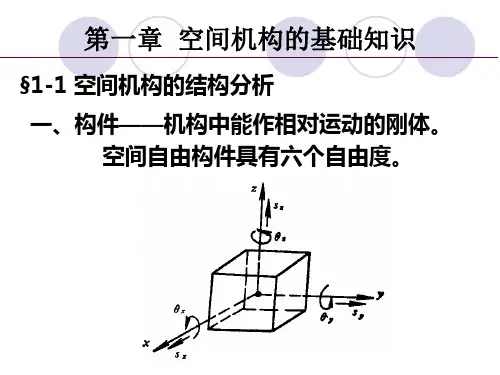
一、机构的组成要素(Main Elements of Composing a Mechanism)机构是具有相对运动的构件组合体,是由构件和运动副两个要素组成的。
1.构件(Member)所谓构件是指机器中独立的运动单元。
构件是运动的单元,零件是加工制造的单元。
下图所示齿轮轴构件是由齿轮、轴、键三个零件组成的。
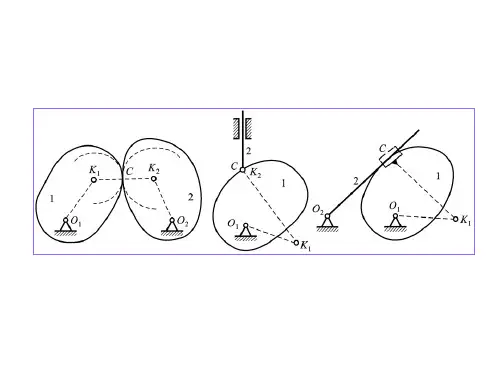
2.运动副(Kinematic Pair)两构件直接接触并能相互产生相对运动而组成的活动联接称为运动副。
两构件参与接触而构成运动副的部分称为运动副元素。
两构件间的运动副所起的作用是限制构件间的相对运动,使相对运动自由度的数目减少,这种限制作用称为约束,而仍具有的相对运动叫做自由度(见下面给出的常用运动副的三维动态图)。
3.运动链(Kinematic Chain )由若干个构件通过运动副联接组成相对可动的构件系统称为运动链。
如果运动链中的各构件构成首末封闭的系统则称为闭式链(如图2-3a),否则称为开式链(如图2-3b )。
在一般机构中,大多采用闭式链,而机器人机构中大多采用开式链。
图2-3a 图2-3b4.机构(Mechanism)如果运动链中的一个构件固定作为机架时则这种运动链称为机构。
二、运动副的分类(Classification of Kinematic Pairs )1. 根据运动副所引入的约束数分类。
把引入一个约束数的运动副称为I级副,引入两个约束数的运动副称为Ⅱ级副,依此类推。
2. 根据构成运动副的两构件的接触情况进行分类。
第一章 机构的结构分析与运动分析一、 考点提要(一)机构的结构分析1.机器与机构机器具有以下三大本质属性:(1)人为实物的组合体、(2)各实物(称为构件)间具有确定的相对运动,能够传递和变换运动。
(3)能对外完成有用的机械功或实现能量转换。
机器是由机构组成的,机构是具有各自特点的,能传递和变换运动的基本组合体。
机构只具有机器的前两个属性。
(1)从结构、运动方面看,机器、机构无区别,机构是机器的组成单元;机器可以有一个或多个机构组成。
(2)从功能方面看,机器、机构有区别。
机器实现能量转换或作机械功而机构是实现运动、动力的传递。
2.机械从结构和运动的角度看,机构和机器是相同的,一般统称为机械。
3.构件与零件构件是机构中的组成元件也是运动单元,零件是机械中的制造单元;构件是由一个或若干个零件固定连接组合而成的,各个零件间不能再有相对运动。
构件在图形表达上是用规定的最简单的线条或几何图形来表示的.但从运动学的角度看,构件又可视为任意大的平面刚体。
机构中的构件可分为三类:(1) 机架。
用来支承活动构件(运动构件)的构件,作为研宪机构运动时的参考坐标系。
每个机构都必须有机架,但尽管机构中的活动构件可以在多处和机架组成运动副,但每个机构仅有一个机架。
机架并不一定是固定不动的构件,而是我们选做静参考系的构件,在分析机构时看作是不动的。
(2) 原动件(主动件)。
输入运动的构件,也是运动规律已知的活动构件,即作用有驱动力的构件。
每个机构至少有一个原动件。
(3) 从动件。
其余随主动件的运动而运动的活动构件,其中至少有一个是运动输出的构件。
4.运动副运动副是两个构件组成的可动联接。
两构件上能够参加接触而构成运动副的表面称为运动副元素。
运动副是约束运动的,因而一个运动副至少引入一个约束,也至少保留一个自由度。
至于两构件组成运动副后还能产生哪些相对运动,则与运动别的类型有关。
运动副按其接触方式分为高副(点线接触)和低副(面接触),低副又可按相对运动形式分为转动副和移动副,判断依据是看两构件的相对运动轨迹是直线还是圆弧。

机构的机构分析范文机构分析是对一个机构的内部和外部环境进行综合评估和分析,以了解该机构的运作模式、竞争力和发展方向。
通过机构分析,可以帮助决策者制定更合理的战略和政策,并有效推动机构的发展。
本文将从以下几个方面对机构进行分析。
一、内部环境分析内部环境分析主要包括机构的组织结构、管理制度、人力资源、财务状况等方面。
1.组织结构:分析机构是否有清晰的组织结构,各部门之间的职责划分是否合理,是否存在管理层级过多或者信息流通不畅的问题。
2.管理制度:评估机构的管理制度是否完善,包括制度的执行情况、业务流程和管理流程的科学性和规范性等。
3.人力资源:分析机构的人才队伍是否稳定并具备相应的专业技能,是否有培训机制和激励措施,以及人员的流动情况等。
4.财务状况:研究机构的财务报表,包括资产负债表、利润表和现金流量表等,分析机构的盈利能力、偿债能力和运营状况。
二、外部环境分析外部环境分析主要包括市场环境、行业竞争和政策法规等方面。
1.市场环境:分析机构所处的市场规模、增长趋势、风险和机遇,以及市场的结构和特点等。
2.行业竞争:了解机构所在行业的竞争格局、竞争对手的实力和策略,并评估机构的竞争优势和劣势。
3.政策法规:分析政府相关政策和法规对机构运营的影响,尤其是对行业监管和准入条件的要求。
三、SWOT分析SWOT分析是机构分析的重要工具,通过评估机构的优势、劣势、机会和威胁,帮助机构制定发展战略。
1.机构的优势:分析机构在资源、技术、品牌等方面所具备的独特优势,以及机构内部的核心竞争力。
2.机构的劣势:识别机构可能存在的劣势,包括管理不善、技术水平不足、市场影响力较弱等问题。
3.机构的机会:发现机构所处环境的机会,包括市场需求的增长、政策支持的利好等。
4.机构的威胁:分析机构可能面临的威胁,包括市场竞争加剧、技术更新换代、政策变化等。
通过以上分析,可以为机构制定发展战略提供参考。
在制定战略时,机构应充分利用自身的优势,抓住市场的机会;同时,要解决自身的劣势,应对可能的威胁。
《机械原理》考试知识点第一篇基本机构及常用机构的运动学设计第一章绪论1.了解机械原理的研究对象及主要内容;2.了解机械原理的地位和作用;3.了解机械原理的学习目的和方法。
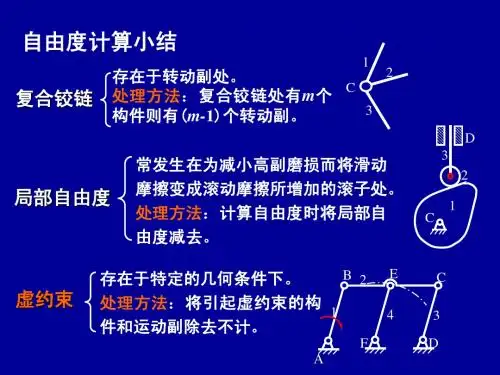
第二章机构的结构分析与综合1.掌握有关机构的概念,如构件、运动副、运动链、杆组等;2.掌握平面机构运动简图的绘制方法和步骤,能根据实际机械正确绘制机构运动简图;3.掌握机构具有确定运动的条件及平面机构自由度的计算,并注意复合铰链、局部自由度和虚约束等情况;4.掌握平面机构中高副低代的方法,要求代替前后,机构的自由度和机构的瞬时运动不变;5.掌握平面低副机构的结构分析和组成原理,能根据给定的机构运动简图进行拆杆组,进行机构的结构分析,并确定机构的级别。
第三章平面连杆机构及其设计1.了解平面连杆机构的类型、应用及其主要特点;2.掌握平面连杆机构特别是它的基本形式——平面铰链四杆机构的一些基本概念和基本知识及其演化方法和应用;3.掌握平面连杆机构的运动特性和传力特性:如有曲柄的条件、急回特性和行程速度变化系数、压力角与传动角、死点位置、运动连续性等;4.掌握等视角定理及几何法刚体导引机构的设计;5.掌握机构的刚化反转法及几何法函数生成机构的设计;6.掌握急回机构的设计;7.掌握用速度瞬心法作平面机构的速度分析方法;8.掌握用相对运动图解法进行机构的运动分析方法;9.掌握用复数矢量法进行机构的运动分析的方法。
第四章凸轮机构及其设计1.掌握凸轮机构的基本概念、凸轮机构的分类及应用;2.掌握从动件常用的运动规律及从动件运动规律的设计原则;3.掌握凸轮机构的反转法原理;4.掌握图解法设计平面凸轮轮廓曲线的设计方法;5.掌握解析法设计平面凸轮轮廓曲线的设计方法;6.掌握凸轮机构的压力角及基本尺寸的设计。
第五章齿轮机构及其设计1.了解齿轮机构的类型和应用;2.掌握齿廓啮合基本定律;3.掌握渐开线的形成及其性质;4.掌握渐开线标准直齿圆柱齿轮的基本参数和几何尺寸计算;5.掌握渐开线直齿圆柱齿轮的啮合传动特点,包括:1)定传动比;2)啮合线与啮合角;3)中心距的可分性;3)正确啮合条件;4)连续传动条件;5)标准中心距和安装中心距;6)无侧隙啮合条件等。