弹塑性力学讲义应力
- 格式:doc
- 大小:1.10 MB
- 文档页数:26

第1章 应 力1. 1 应力矢量物体受外力作用后,其内部将产生内力,即物体本身不同部分之间相互作用的力。
为了描述内力场,Chauchy 引进了应力的重要概念。
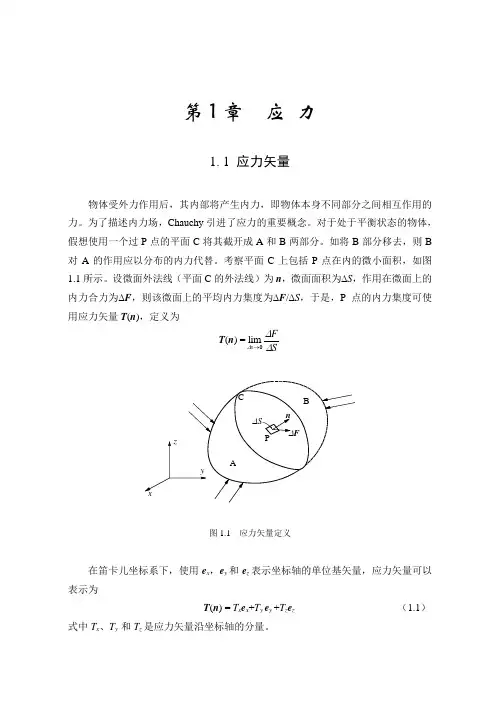
对于处于平衡状态的物体,假想使用一个过P 点的平面C 将其截开成A 和B 两部分。
如将B 部分移去,则B 对A 的作用应以分布的内力代替。
考察平面C 上包括P 点在内的微小面积,如图1.1所示。
设微面外法线(平面C 的外法线)为n ,微面面积为∆S ,作用在微面上的内力合力为∆F ,则该微面上的平均内力集度为∆F /∆S ,于是,P 点的内力集度可使用应力矢量T (n ),定义为T (n ) =SFs ∆∆∆0lim→B∆SACPn ∆Fxyz图1.1 应力矢量定义在笛卡儿坐标系下,使用e x ,e y 和e z 表示坐标轴的单位基矢量,应力矢量可以表示为T (n ) = T x e x +T y e y +T z e z(1.1)式中T x 、T y 和T z 是应力矢量沿坐标轴的分量。
上篇弹性力学第1章应力8除进行公式推导外,通常很少使用应力矢量的坐标分量T x、T y 和T z。
实际应用中,往往需要知道应力矢量沿微面法线方向和切线方向的分量,沿法线方向的应力分量称为正应力,沿切线方向的应力分量称为剪应力。
显而易见,应力矢量的大小和方向不仅取决于P点的空间位置,而且还与所取截面的法线方向n有关,即作用在同一点不同法线方向微面上的应力矢量不同。
所有这些应力矢量构成该点的应力状态。
由应力矢量的定义并结合作用力与反作用力定律,在同一点,外法线为-n微面上的应力矢量为:T(-n)= -T(n) (1.2)1.2 应力张量人们讨论问题常常是在笛卡儿坐标中进行,因此,我们使用六个与坐标面平行的平面从图1.1中P点的邻域截取一个微六面体,如图1.2所示。
在这个微六面体中,若微面的外法线方向与坐标正方向一致,则称为正面;若与坐标正方向相反,则称为负面。

弹塑性力学讲义弹塑性力学1 弹塑性的概念所谓弹塑性指的是物体在外力作用下发生变形而外力除去后变形不能完全恢复的性质。
变形中可回复的部分称为弹性变形,变形中不可回复的部分称为塑性变形。
塑性变形总是在外力的作用超过一定的限度后出现。
2 简单拉压状态下金属材料弹塑性行为及其数学模型(1)理想塑性材料的弹塑性行为σs主要特点:屈服后加载,表现出一种流动变形现象,材料失去进一步承载的能力;屈服后卸载,应力应变增量大致与弹性变形段相同。
卸载至零后再次加载,应力应变关系相当于原应力应变关系曲线在应变轴方向作了一个平移,平移量为残余塑性应变。
数学表达:Eε(0 ε εs)σ σ(ε)σ(ε ε)s s Eε( εs ε 0)σ σ(ε)(ε εs) σs(2)线性强化材料的弹塑性行为σσs主要特点:屈服后加载,材料仍有进一步承载的能力,但应力应变增量的比例较弹性段小;屈服后卸载,应力应变增量大致与弹性变形段相同。
卸载至零后再次加载,屈服应力为卸载前的应力值(较先前的屈服应力大),应力应变关系相当于原应力应变关系曲线在应变轴方向作了一个平移,平移量为残余塑性应变,同时应力轴伸长。
两种常用的强化模型数学表达:Eε(0 ε εs)σ σ(ε)σ E(ε ε)(ε ε)ss sEε( εs ε 0)σ σ(ε)σs E(ε εs)(ε εs)上述描述弹塑性材料应力应变关系的数学模型称为全量型本构关系。
显然不能代表弹塑性变形规律的全貌。
它描述了单调应力-应变过程。
为了描述弹塑性力学行为的“过程相依”,需要建立增量型本构关系。
记当前应力为σ0,应力增量为dσ,应变增量为dε,分析弹塑性行为可以得出相应的增量变形法则。
理想塑性材料的增量型弹塑性关系(1)由dσ决定dε当σs σ0 σs时,dε dσ/E 当σ0 σs时,dεdλσ0ifdσ 0 dσ/Eifdσ 0dλσ0ifdσ 0当σ0 σs时,dεdσ/Eifdσ 0(2)由dε决定dσ当σs σ0 σs时,dσ Edε0ifdε 0当σ0 σs时,dσEdεifdε 0当σ0 σs时,dσ0ifdε 0 Edεifdε 0例:已经测得某理想弹塑性材料的细杆所经受的轴向应变过程如图所示,试求此杆中的应力过程。
第1章 应 力1. 1 应力矢量物体受外力作用后,其内部将产生内力,即物体本身不同部分之间相互作用的力。
为了描述内力场,Chauchy 引进了应力的重要概念。
对于处于平衡状态的物体,假想使用一个过P 点的平面C 将其截开成A 和B 两部分。
如将B 部分移去,则B 对A 的作用应以分布的内力代替。
考察平面C 上包括P 点在内的微小面积,如图1.1所示。
设微面外法线(平面C 的外法线)为n ,微面面积为∆S ,作用在微面上的内力合力为∆F ,则该微面上的平均内力集度为∆F /∆S ,于是,P 点的内力集度可使用应力矢量T (n ),定义为T (n ) =SFs ∆∆∆0lim→B∆SACPn ∆Fxyz图1.1 应力矢量定义在笛卡儿坐标系下,使用e x ,e y 和e z 表示坐标轴的单位基矢量,应力矢量可以表示为T (n ) = T x e x +T y e y +T z e z(1.1)式中T x 、T y 和T z 是应力矢量沿坐标轴的分量。
上篇弹性力学第1章应力8除进行公式推导外,通常很少使用应力矢量的坐标分量T x、T y 和T z。
实际应用中,往往需要知道应力矢量沿微面法线方向和切线方向的分量,沿法线方向的应力分量称为正应力,沿切线方向的应力分量称为剪应力。
显而易见,应力矢量的大小和方向不仅取决于P点的空间位置,而且还与所取截面的法线方向n有关,即作用在同一点不同法线方向微面上的应力矢量不同。
所有这些应力矢量构成该点的应力状态。
由应力矢量的定义并结合作用力与反作用力定律,在同一点,外法线为-n微面上的应力矢量为:T(-n)= -T(n) (1.2)1.2 应力张量人们讨论问题常常是在笛卡儿坐标中进行,因此,我们使用六个与坐标面平行的平面从图1.1中P点的邻域截取一个微六面体,如图1.2所示。
在这个微六面体中,若微面的外法线方向与坐标正方向一致,则称为正面;若与坐标正方向相反,则称为负面。
因此有三个正面和三个负面。
图1.2 一点的应力状态上篇 弹性力学 第1章 应力9考察作用在法线为e x ,e y 和e z 三个正面上的应力矢量T (e x )、T (e y )和T (e z ),每个应力矢量沿空间坐标轴e x ,e y 和e z 有三个分量,其中一个分量垂直于作用面,是正应力,两个分量平行于作用面,是剪应力,于是 T (e x )=σx e x +τxy e y +τxz e z T (e y )=τyx e x +σy e y +τyz e z (1.3)T (e z )=τzx e x +τzy e y +σz e z三个应力矢量共9个分量,构成应力张量在笛卡儿坐标系下的9个分量⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡στττστττσz zyzx yz y yx xz xy x 对角上的元素是正应力,非对角上的元素是剪应力,剪应力有两个下标,前一个下标代表作用面的法线方向,后一下标代表力的作用方向。
在使用张量表述的教科书里,下标x 、y 、z 往往用1、2、3取代,九个应力分量常记为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡σσσσσσσσσ=σ333231232221131211 ij应力正、负号规定是:正面上的应力若指向坐标轴正方向为正,否则为负;负面的应力若指向坐标轴负方向为正,否则为负。
这个规定正好反映了作用力与反作用力定律。
图1.2中的应力均为正值。
式(1.3)使用张量可以表示为T (e i )=σik e k(1.3a )应当指出:物体内各点的应力状态,一般说来是不同的,为非均匀分布,即各点的应力分量应为空间坐标x 、y 、z 的函数。
所以,应力张量σij 与给定的空间位置有关,提及应力张量总是针对物体中的某一确定点而言的。
从下节中我们将知道,应力张量σij 完全确定了一点的应力状态。
1.3 Chauchy 公式(斜面应力公式)一点的应力状态中,若已知三个互相垂直面上的应力矢量,其它任意一斜面上上篇 弹性力学 第1章 应力10 的应力矢量可从该点的平衡条件中导出。
图1.3所示的微四面体由三个负面和一个斜面组成,设斜面的外法线单位矢量为n =l e x +m e y + n e z(1.3b )斜面∆ABC 的面积为dS ,则三个负面的面积分别是∆BOC = ldS ∆AOC = mdS ∆AOB = ndS四面体的体积为dV =31dh dS 式中dh 是四面体的高。
nT (-e )T (-e )T (-e )T (n )e xy e OABCzx z e yxyz图1.3 四面体上的应力矢量由微四面体的平衡条件得:T (n )dS +T (-e x )ldS + T (- e y )mdS + T (- e z )ndS +X31dh dS =0式中X 是单位体积力矢量,T (-e x )、T (-e y )和T (-e z )分别是法向为-e x ,-e y 和-e z 微面上的应力矢量。
上式中的最后一项是比前面项高一阶的小量,可忽略不计,考虑式(1.2),上式可表示为T ( n )=T (e x )l +T (e y )m +T (e z )n(1.4)这就是著名的Chauchy 公式,又称为斜截面应力公式,其实质是微四面体的平衡条上篇 弹性力学 第1章 应力11件。
将斜面应力矢量T ( n )沿坐标轴方向分解T ( n )=T x e x +T y e y +T z e z(1.5)注意:T x 、T y 、T z 是T (n )沿坐标轴方向的分量,一般不是斜截面上的正应力和剪应力。
将式(1.3)和式(1.5)代入式(1.4),则式(1.4)可用分量的形式表示为 T x =σx l +τyx m +τzx n T y =τxy l +σy m +τzy n (1.6)T z =τxz l +τyz m +σz n若下标x 、y 、z 用1、2、3取代,而l 、m 、n 用n 1、n 2、n 3代替,式(1.4)和式(1.6)的张量形式分别就是 T ( n )=n i T (e i ) (1.7a )T j = n i σij 或 T ( n )=n •σ(1.7b ) 式中“•”是张量点积符号,见附录1。
Chauchy 公式有两个重要的应用。
(1)求斜截面的各种应力。
斜截面上的正应力σn 是应力矢量T (n )沿其法线方向的投影,考虑到式(1.3a )和式(1.5),因此有σn =T (n )•n = T x l + T y m + T z n(1.8a )将式(1.6)(或式(1.7))代入式(1.8a )得:σn =σx l 2+σy m 2+σz n 2+2τxy lm +2τyz mn +2τzx nl=σij n i n j(1.8b )上式中使用了后面的剪应力互等定理式(1.11)利用式(1.5)可以算出斜截面应力矢量的大小,为222)(z y x T T T ++=n T斜截面上的剪应力分量是22)(n n n T σ-=τ(2)确定力边界条件(见1.5节)。
例1-1 在物体内的一点,应力张量是上篇 弹性力学 第1章 应力12 []⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=504030401ijσ求在321212121e e e n +-=面上的法向正应力和切向剪应力。
解: 利用式(1.7)求该斜面上应力矢量的三个坐标分量是3132121111σ+σ+σ=n n n T )4(21021121-⨯+⨯-⨯==2221-= 230213210213232221212-=⨯+⨯-⨯=σ+σ+σ=n n n T2252521021)4(213332321313+-=⨯+⨯--⨯=σ+σ+σ=n n n T 该斜面上的正应力为22272252212321)2221(21332211-=⎪⎪⎭⎫ ⎝⎛+-⨯+⎪⎭⎫ ⎝⎛-⨯--⨯=++=σn T n T n T N 该斜面上的剪应力为24827212332221+=σ=N -++T T T S1.4 平衡方程物体处在平衡状态,其内部的每一点都应处在平衡状态。
使用一个微六面体代表物体内的一点,则作用在该微六面体上的所有力应满足平衡条件,由此我们可推导平衡微分方程。
如图1.4所示的微六面体,取直角坐标系的坐标轴与边重合,各边的长度分别为dx 、dy 、dz 。
在微六面体x =0的面上,应力是σx 、τxy 、τxz ;在x=dx 面上的应力,根据应力函数的连续性并按Taylor 级数相对x =0的面展开,略去高阶项,它应是dx xdx x dx x ∂τ∂+τ∂τ∂+τ∂σ∂+σxz xz xy xy xx 、、上篇 弹性力学 第1章 应力13同理,可由y=0,z=0面上的应力表示y=dy ,z=dz 面上的应力。
最后,所有各面上的应力如图1.4所示。
图1.4 微单元体的平衡考虑微单元体沿x 方向的平衡,可得:dxdz dxdz dy y dydz dydz dx x yx yx yx x x x τ-⎪⎪⎭⎫ ⎝⎛∂τ∂+τ+σ-⎪⎭⎫⎝⎛∂σ∂+σ 0=+τ-⎪⎭⎫⎝⎛∂τ∂+τ+Xdxdydz dxdy dxdy dz z zx zx zx整理上式并除以微单元体的体积dxdydz ,得:0=+∂τ∂+∂τ∂+∂σ∂X zy x zxyx x (1.9a )同理,建立y 、z 方向的平衡条件,可得:0=+∂τ∂+∂σ∂+∂τ∂Y zyxzy y xy (1.9b )上篇 弹性力学 第1章 应力140=+∂σ∂+∂τ∂+∂τ∂Z zy x zyz xz (1.9c )式(1.9)就是弹性力学的平衡微分方程。
注意式(1.9)中X 、Y 、Z 是单位体积里的体积力矢量X 沿x 、y 、z 方向上的分量,即X =X e x +Y e y +Z e z(1.10)考虑图1.4中微单元体的力矩平衡。
对通过形心C 点平行于z 方向的轴取矩。
凡作用线通过C 点或方向与z 轴平行的应力和体力分量对该轴的力矩均为零,于是力矩平衡方程在略去高阶项后只剩两项(τxy dydz )dx -(τyx dxdz )dy =0由此可得:τxy =τyx(1.11a )同理,对沿x 和y 方向的形心轴取矩得: τyz =τzy τxz = τzx(1.11b )这就是剪应力双生互等定理。
这个定理以后将经常被使用,使用时不再单独说明。
下面从物体整体平衡的角度推导平衡微分方程。
从物体中任意截取一个脱离体Q ,它的边界为Γ,在Q 内部作用有体积力矢量X ,在边界Γ上作用有应力矢量T (n )。
脱离体静力平衡要求作用在它上面的合力应为零,即()0=+⎰⎰QX n T dQ d ΓΓ (1.12a )将式(1.4)代入上式,得:[]0)()()(=+++⎰⎰Qz y xX e T e T eT dQ d n m l ΓΓ(1.12b )使用散度定理式(A2.19),式(1.12b )可写成⎰⎥⎦⎤⎢⎣⎡+∂∂+∂∂+∂∂Q X e T e T e T dQ z y x z y x )()()(=0 由于脱离体Q 是任意的,因此上篇 弹性力学 第1章 应力15X e T e T e T +∂∂+∂∂+∂∂zy x z y x )()()(= 0 (1.12c )将式(1.3)和式(1.10)代入上式,我们有⎪⎪⎭⎫ ⎝⎛+∂τ∂+∂τ∂+∂σ∂X z y x zx yx x e x +⎪⎪⎭⎫ ⎝⎛+∂τ∂+∂σ∂+∂τ∂Y z y x zy y xy e y +⎪⎪⎭⎫⎝⎛+∂σ∂+∂τ∂+∂τ∂Z z y x z yz xz e z =0 上式就是平衡微分方程式(1.9)的矢量表示形式。