6连杆机构解析
- 格式:ppt
- 大小:2.74 MB
- 文档页数:83
六连杆压力机优化设计和分析1 绪论1.1 国内外压力机的发展概况机械压力机作为工程上广泛应用的一种锻压设备,在工业生产中的地位变的越来越重要[1]。
多连杆压力机的多连杆机构是现代机械压力内、外滑块普遍采用的工作机构。
多连杆驱动的出发点是:降低工作行程速度,加快空程速度,已达到提高生产率的目的。
使用多连杆驱动技术的机械压力机,不用改变压力机的工作行程速度,即可达到提高生产率、延长模具寿命并降低噪声的目的[2]。
目前国内的发展现状:进入21世纪以来,中国锻压机械行业通过技术引进,合作生产及合资等多种方式,已经快速地提高了我国的冲压设备整体水平,近年来设计制造的很多产品,其技术性能指标已经能够接近世界先进水平。
目前我国制造的多连杆压力机刚性好、精度高、具有良好的抗热变形能力和良好的平衡性,配备高速高精度的送料装置,采取良好的隔声降噪减振措施。
不仅能保证良好的性能、质量和可靠性,在设备的成套、生产线和数控化、自动化等方面也有了很大的发展,能开发、设计、制造大型精密高效的压力机。
近年来,随着电子技术、自动控制技术的发展和应用,我国多连杆压力机的自动化程度、安全性、可靠性、生产率、产品质量都得到了明显的改善,压力机的制造能力也不断提高。
但我国压力机的生产总体规模小,技术创新能力薄弱,数控化程度相对较差,管理水平落后,品总和规格不全,特别是大、高、精类还需国外的供应,另外,我国的锻压设备与发达国家相比结构陈旧,性能较差,机械化程度差。
因此,如何继续缩小与国外先进产品的距离仍是我国设备制造企业需要面对的挑战。
国外发展现状:国外的多连杆压力机的设计生产制造的专门化、自动化程度越来越高,朝着高速度、高精度的方向发展。
其产品的品种和规格齐全,结构新颖,性能,质量,机械化程度好,精度,可靠性高,各种设备的材料利用率、生产率都很高。
而且规模大,特别是数控化程度非常好,具有很高的创新水平。
加工时,实现了软接触和平稳成型,加工冲击小,故模具的寿命特别长,压力机的行程可以任意设定,曲轴的摆角可调,使其在某一需要的角度内摆动。
第八章打纬第一节打纬机构打纬机构沿织机前后摆动,而引纬沿织机的左右运动,这就要求打纬与引纬协调配合,打纬机构的摆动应为引纬运动留有足够的空间和时间。
常用的打纬机构按其结构型式的不同,可分为连杆式打纬机构、共轭凸轮打纬机构及圆筘片打纬机构。
打纬机构还可按其打纬动程变化与否分为恒定动程的打纬机构、变化动程的打纬机构。
目前常用的主要有连杆式打纬机构和共轭凸轮打纬机构,圆筘片打纬机构主要用于多梭口织机。
恒定动程的打纬机构主要用于普通织机,变化动程的打纬机构主要用于毛巾织机上。
一、连杆式打纬机构连杆式打纬机构是织机上使用最为广泛的打纬机构,常用的有四连杆打纬机构和六连杆打纬机构两种类型。
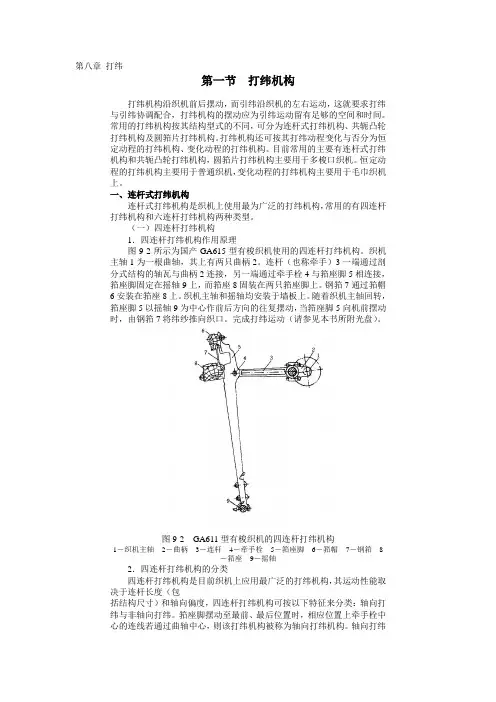
(一)四连杆打纬机构1.四连杆打纬机构作用原理图9-2所示为国产GA615型有梭织机使用的四连杆打纬机构。
织机主轴1为一根曲轴,其上有两只曲柄2。
连杆(也称牵手)3一端通过剖分式结构的轴瓦与曲柄2连接,另一端通过牵手栓4与筘座脚5相连接,筘座脚固定在摇轴9上,而筘座8固装在两只筘座脚上。
钢筘7通过筘帽6安装在筘座8上。
织机主轴和摇轴均安装于墙板上。
随着织机主轴回转,筘座脚5以摇轴9为中心作前后方向的往复摆动,当筘座脚5向机前摆动时,由钢筘7将纬纱推向织口。
完成打纬运动(请参见本书所附光盘)。
图9-2 GA611型有梭织机的四连杆打纬机构1-织机主轴2-曲柄3-连杆4-牵手栓5-筘座脚6-筘帽7-钢筘8-筘座9-摇轴2.四连杆打纬机构的分类四连杆打纬机构是目前织机上应用最广泛的打纬机构,其运动性能取决于连杆长度(包括结构尺寸)和轴向偏度,四连杆打纬机构可按以下特征来分类:轴向打纬与非轴向打纬。
筘座脚摆动至最前、最后位置时,相应位置上牵手栓中心的连线若通过曲轴中心,则该打纬机构被称为轴向打纬机构。
轴向打纬机构具有筘座脚向前摆动和向后摆动各占织机主轴180度,即平均速度相等的特性。
若筘座脚摆动至最前、最后位置时,相应位置上牵手栓中心的连线不通过曲轴中心,则该打纬机构被称为非轴向打纬机构。
牛头刨床的连杆机构运动分析0 前言机构运动分析的任务是对于结构型式及尺寸参数已定的具体机构,按主动件的位置、速度和加速度来确定从动件或从动件上指定点的位置、速度和加速度。
许多机械的运动学特性和运动参数直接关系到机械工艺动作的质量,运动参数又是机械动力学分析的依据,所以机构的运动分析是机械设计过程中必不可少的重要环节。
以计算机为手段的解析方法,由于解算速度快,精确度高,程序有一定的通用性,已成为机构运动分析的主要方法。
连杆机构作为在机械制造特别是在加工机械制造中主要用作传动的机构型式,同其他型式机构特别是凸轮机构相比具有很多优点。
连杆机构采用低副连接,结构简单,易于加工、安装并能保证精度要求。
连杆机构可以将主动件的运动通过连杆传递到与执行机构或辅助机构直接或间接相连的从动件,实现间歇运动,满足给定的运动要求,完成机器的工艺操作。
牛头刨床是一种利用工作台的横向运动和纵向往复运动来去除材料的一种切削加工机床。
工作台的纵向往复运动是机床的主运动,实现工件的切削。
工作台的横向运动即是进给运动,实现对切削精度的控制。
本文中只分析纵向运动的运动特性。
牛头刨床有很多机构组成,其中实现刨头切削运动的六连杆机构是一个关键机构。
刨床工作时,通过六杆机构驱动刨刀作往复移动。
刨刀右行时,当刨刀处于工作行程时;要求刨刀的速度较低且平稳,以减小原动机的容量和提高切削质量。
当刨刀处于返回行程时,刨刀不工作,称为空行程,此时要求刨刀的速度较高以提高生产率。
由此可见,牛头刨床的纵向运动特性对机床的性能有决定性的影响。
1 牛头刨床的六连杆机构牛头刨床有很多机构组成,其中实现刨头切削运动的六杆机构是一个关键机构。
图1所示的为一牛头刨床的六连杆机构。
杆1为原动件,刨刀装在C点上。
假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s沿着逆时针方向回转,要求分析各从动件的角位移、角速度和角加速度以及刨刀C点的位移、速度和加速度的变化情况。
机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:刘泽陆(********)陈柯宇(11071177)熊宇飞(11071174)张保开(11071183)班级:1107172013年6月10日摘要 (3)曲柄滑块机构简介 (4)曲柄滑块机构定义 (4)曲柄滑块机构的特性及应用 (4)曲柄滑块机构的分类 (8)偏心轮机构简介 (9)曲柄滑块的动力学特性 (10)曲柄滑块的运动学特性 (11)曲柄滑块机构运行中的振动与平衡 (14)参考文献 (15)组员分工 (15)摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
平面六杆机构的运动分析
1.确定机构的几何特性:首先,需要根据机构的构件和铰链的几何特
性确定机构的几何特性。
这包括确定构件的长度、铰链的位置和角度。
2.建立机构的运动方程:根据机构的几何特性,可以建立机构的运动
方程。
运动方程描述了机构各构件之间的运动关系,可以通过几何关系和
运动链法建立运动方程。
3.解决运动方程:通过求解运动方程,可以得到机构各构件的位置、
速度和加速度。
这可以通过数值方法或解析方法来完成。
4.分析机构的运动特性:根据机构的运动方程和解决的结果,可以分
析机构的运动特性。
这包括机构的平稳性、运动范围、速度和加速度的变
化等。
5.优化机构的设计:根据分析的结果,可以对机构的设计进行优化。
例如,可以调整构件的长度、角度和铰链的位置,以改善机构的运动性能。
总之,平面六杆机构的运动分析是研究和设计机械系统的重要步骤。
通过分析机构的运动特性,可以优化机构的设计,提高机械系统的性能和
效率。
因此,对平面六杆机构的运动分析有着重要的理论和实际意义。
六连杆压力机优化设计和分析1 绪论1.1 国内外压力机的发展概况机械压力机作为工程上广泛应用的一种锻压设备,在工业生产中的地位变的越来越重要[1]。
多连杆压力机的多连杆机构是现代机械压力内、外滑块普遍采用的工作机构。
多连杆驱动的出发点是:降低工作行程速度,加快空程速度,已达到提高生产率的目的。
使用多连杆驱动技术的机械压力机,不用改变压力机的工作行程速度,即可达到提高生产率、延长模具寿命并降低噪声的目的[2]。
目前国内的发展现状:进入21世纪以来,中国锻压机械行业通过技术引进,合作生产及合资等多种方式,已经快速地提高了我国的冲压设备整体水平,近年来设计制造的很多产品,其技术性能指标已经能够接近世界先进水平。
目前我国制造的多连杆压力机刚性好、精度高、具有良好的抗热变形能力和良好的平衡性,配备高速高精度的送料装置,采取良好的隔声降噪减振措施。
不仅能保证良好的性能、质量和可靠性,在设备的成套、生产线和数控化、自动化等方面也有了很大的发展,能开发、设计、制造大型精密高效的压力机。
近年来,随着电子技术、自动控制技术的发展和应用,我国多连杆压力机的自动化程度、安全性、可靠性、生产率、产品质量都得到了明显的改善,压力机的制造能力也不断提高。
但我国压力机的生产总体规模小,技术创新能力薄弱,数控化程度相对较差,管理水平落后,品总和规格不全,特别是大、高、精类还需国外的供应,另外,我国的锻压设备与发达国家相比结构陈旧,性能较差,机械化程度差。
因此,如何继续缩小与国外先进产品的距离仍是我国设备制造企业需要面对的挑战。
国外发展现状:国外的多连杆压力机的设计生产制造的专门化、自动化程度越来越高,朝着高速度、高精度的方向发展。
其产品的品种和规格齐全,结构新颖,性能,质量,机械化程度好,精度,可靠性高,各种设备的材料利用率、生产率都很高。
而且规模大,特别是数控化程度非常好,具有很高的创新水平。
加工时,实现了软接触和平稳成型,加工冲击小,故模具的寿命特别长,压力机的行程可以任意设定,曲轴的摆角可调,使其在某一需要的角度内摆动。
一、填空题:1.平面连杆机构是由一些刚性构件用低副连接组成的。
2.由四个构件通过低副联接而成的机构成为四杆机构。
3.在铰链四杆机构中,运动副全部是转动副。
4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。
5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。
6.在铰链四杆机构中,与连架杆相连的构件称为连杆。
7.某些平面连杆机构具有急回特性。
从动件的急回性质一般用行程速度变化系数表示。
8.对心曲柄滑快机构无急回特性。
9.偏置曲柄滑快机构有急回特性。
10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。
11.机构处于死点时,其传动角等于0。
12.机构的压力角越小对传动越有利。
13.曲柄滑快机构,当取滑块为原动件时,可能有死点。
14.机构处在死点时,其压力角等于90º。
15.平面连杆机构,至少需要4个构件。
二、判断题:1.平面连杆机构中,至少有一个连杆。
(√)2.平面连杆机构中,最少需要三个构件。
(×)3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。
(√)4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。
(√)5.有死点的机构不能产生运动。
(×)6.机构的压力角越大,传力越费劲,传动效率越低。
(√)7.曲柄摇杆机构中,曲柄为最短杆。
(√)8.双曲柄机构中,曲柄一定是最短杆。
(×)9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。
(√)10.平面连杆机构中,压力角的余角称为传动角。
(√)11.机构运转时,压力角是变化的。
(√)三、选择题:1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。
A <=;B >=;C > 。
2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。
机械原理6杆机构设计实例机械原理中的六杆机构是一种基本的机械结构,由六个连杆组成,可以实现特定的运动和转换功能。
本文将为您提供一个六杆机构的设计实例,以便更好地理解其工作原理和应用。
1. 设计目标:我们的设计目标是创建一个六杆机构,可以将旋转运动转换为直线运动。
该机构将用于驱动一个线性推进器,以实现物体在直线轴上的移动。
2. 机构设计:为了实现我们的设计目标,我们选择了一种常见的六杆机构类型,即双曲线传动机构。
该机构由两个相交的双曲线连杆和四个普通连杆组成。
其中两个普通连杆连接驱动轴和双曲线连杆,另外两个普通连杆连接双曲线连杆和线性推进器。
3. 工作原理:当驱动轴旋转时,通过连杆的连接,双曲线连杆也开始旋转。
由于双曲线曲面的特性,使得连接在其上的普通连杆产生复杂的运动轨迹。
这种运动轨迹可以被利用,使得线性推进器在直线轴上产生直线运动。
4. 应用:这种六杆机构设计可以广泛应用于需要将旋转运动转换为直线运动的场景中。
例如,在自动化生产线中,可以使用该机构实现工件的装配和定位。
另外,在机床中,该机构也可以用于驱动刀具进行直线切削操作。
5. 设计考虑:在进行六杆机构设计时,需要考虑以下几个因素:- 机构尺寸:根据特定应用的需求,确定机构的尺寸和比例。
- 运动平稳性:为了确保机构运动平稳,需要进行合理的连杆长度和角度的选择。
- 载荷承受能力:根据应用场景中的负载要求,设计机构以承受相应的载荷。
- 动力传递效率:通过减少摩擦和能量损失来提高机构的动力传递效率。
6. 结论:通过设计一个六杆机构,我们成功地实现了将旋转运动转换为直线运动的目标。
该机构可以在自动化生产线和机床等领域中发挥重要作用。
在设计过程中,我们需要考虑机构尺寸、运动平稳性、载荷承受能力和动力传递效率等因素。
这个设计实例展示了六杆机构在实际应用中的重要性和灵活性。
以上就是关于机械原理六杆机构设计的一个实例解释。
通过这个例子,我们可以更好地理解六杆机构的工作原理和应用,以及设计过程中需要考虑的因素。
第四章连杆机构平面连杆机构是将各构件用转动副或移动副联接而成的平面机构。
最简单的平面连杆机构是由四个构件组成的,简称平面四杆机构。
它的应用非常广泛,而且是组成多杆机构的基础。
4-1 铰链四杆机构的基本形式和特性全部用回转副组成的平面四杆机构称为铰链四杆机构,如图4-1所示。
机构的固定件4称为机架;与机架用回转副相联接的杆1和杆3称为连架杆;不与机架直接联接的杆2称为连杆。
能作整周转动的连架杆,称为曲柄。
仅能在某一角度摆动的连架杆,称为摇杆。
对于铰链四杆机构来说,机架和连杆总是存在的,因此可按照连架杆是曲柄还是摇杆,将铰链四杆机构分为三种基本型式:曲柄摇杆机构..................、双曲柄机构和双摇杆机构。
图4-1 铰链四杆机构一、曲柄摇杆机构在铰链四杆机构中,若两个连架杆中,一个为曲柄,另一个为摇杆,则此铰链四杆机构称为曲柄摇杆机构。
图4-2所示为调整雷达天线俯仰角的曲柄摇杆机构。
曲柄1缓慢地匀速转动,通过连杆2使摇杆3在一定的角度范围内摇动,从而调整天线俯仰角的大小。
图4-2 雷达天线俯仰角调整机构图4-3a所示为缝纫机的踏板机构,图b为其机构运动简图。
摇杆3(原动件)往复摆动,通过连杆2驱动曲柄1(从动件)作整周转动,再经过带传动使机头主轴转动。
图4-3 缝纫机的踏板机构下面详细讨论曲柄摇杆机构的一些主要特性:1.急回运动如图4-4所示为一曲柄摇杆机构,其曲柄AB在转动一周的过程中,有两次与连杆BC 共线。
在这两个位置,铰链中心A与C之间的距离AC1和AC2分别为最短和最长,因而摇杆CD的位置C1D和C2D分别为两个极限位置。
摇杆在两极限位置间的夹角ψ称为摇杆的摆角。
图4-4 曲柄摇杆机构的急回特性当曲柄由位置AB1顺时针转到位置AB2时,曲柄转角ϕ1=180+θ,这时摇杆由极限位置C1D摆到极限位置C2D,摇杆摆角为ψ;而当曲柄顺时针再转过角度ϕ2=180-θ时,摇杆由位置C2D摆回到位置C1D,其摆角仍然是ψ。
第2章平面连杆机构典型例题1.图示为两种夹紧机构,试问机构应处于何位置方是最佳夹紧位置?并说明原因。
687a)应转至FE、EC、CD杆的共线位置(作图略)。
此位置为机构的死点。
b)应转至DB、CB杆共线位置(作图略)。
此位置为机构死点。
2.试画出图示机构的传动角γ和压力角α,并判断哪些机构在图示位置正处于“死点”?696(1)、(3)机构正处死点位置。
3.在图示的各四杆机构中,已知各构件的尺寸(由图上量取,图中比例尺l 2µ=mm/mm ),杆AB 为主动件,转向如图所示。
现要求:1)是确定这三种机构有曲柄的条件和各机构的名称;2)机构有无急回运动?若有,试以作图法确定其极位夹角θ,并计算其行程速比系数K ;3)标出各机构在图示位置时的机构传动角γ和压力角α,求作最小传动角min γ和最小压力角min α,并说明机构的传动性能如何? 4)机构是否存在死点位置?4.试求图示各机构在图示位置时全部瞬心的位置(用符号ij P 直接标注在图上)。
5.在图示的齿轮-连杆组合机构中,试用瞬心法求齿轮1 与齿轮3的传动比13/ωω。
解:1) 计算此机构所有瞬心的数目(1)/26(61)/215K N N =−=−=2) 为了求传动比13/ωω需求出如下三个瞬心(填出下角标) 16P 、36P 、13P 。
3) 传动比13/ωω计算公式是3613131613P P DK P P AK ωω==由于构件1 、3在K 点的速度方向相同,从而知3ω与1ω同向。
6.图示为开关的分合闸机构。
已知l AB =150mm ,l BC =200mm ,l CD =200mm ,l AD =400 mm 。
(722)试回答:(1)该机构属于何种类型的机构;(2)AB 为主动件时,标出机构在虚线位置时的压力角α 和传动角γ;(3)分析机构在实线位置(合闸)时,在触头接合力Q 作用下机构会不会打开,为什么?(1)150400200200+>+,不满足有曲柄条件,该机构为双摇杆机构。