单元机组协调控制系统(讲稿)
- 格式:docx
- 大小:548.47 KB
- 文档页数:18
第十三章单元机组协调控制系统第一节概述一、单元机组控制在热力发电厂中,存在着母管制和单元制两种不同的热力系统。
在母管制系统中,每台锅炉的出口蒸汽管道都用蒸汽母管相互连通,汽轮机所需要的蒸汽是由一组锅炉产生,每台锅炉只承担一台汽轮机所需蒸汽的一部分,汽轮机与锅炉之间无一一对应关系,汽轮机负荷变化对每台锅炉影响较小。
在母管制热力系统中,汽轮机和锅炉的控制是各自独立的,汽轮机的控制系统通过改变调节阀的开度,调节汽轮机进汽量来满足负荷要求,锅炉的控制系统通过改变燃烧率来控制蒸汽压力。
单元制热力系统是一台汽轮机配一台锅炉,形成锅炉-汽轮机-发电机组成单元制运行方式。
单元制运行方式简化了热力系统,使蒸汽经过中间再热处理成为可能,提高了机组的热效率。
目前,大型机组都是采用单元制热力系统,单元机组是由锅炉、汽轮机和发电机联合起来共同适应电网的负荷要求,因此要求单元制机组具有变负荷运行能力,同时还具有一定的调频能力,此外,在机组发生某些局部故障的情况下,依然要维持机组运行。
在单元机组满足外部电网负荷要求时,同时还要求机组能够安全经济运行,其主要反映在内部运行参数(主蒸汽压力)稳定。
单元机组的输出电功率与电网负荷要求是否一致,反映着机组与外部电网之间能量供求的平衡关系,而主蒸汽压力反映了单元机组内的锅炉、汽轮机和发电机之间能量供求的平衡关系。
因此机组的输出电功率PE和主蒸汽压力pT是单元机组控制的两个主要参数。
就单元机组控制而言,锅炉、汽轮机和发电机是一个不可分割的整体,然而从内部来看,汽轮机、锅炉实际上又是相对独立的,通过相应的调节手段,如汽轮机调节阀开度、锅炉燃烧率,来满足电网负荷要求和保持主蒸汽压力稳定。
然而锅炉和汽轮机的动态特性存在很大差异,即汽轮机动态响应快,锅炉动态响应慢。
这一快一慢的控制对象组合一起,在实施单元机组控制时,必须协调好机、炉两侧的控制动作,在满足负荷响应的同时,兼顾内部运行参数稳定,既具有较快的负荷响应和一定调频能力,又保证主蒸汽压力偏差在允许范围之内,因此从单元机组整体考虑,构建一种单元机组协调控制系统(Coordination Control System,CCS)来协调机炉控制任务。
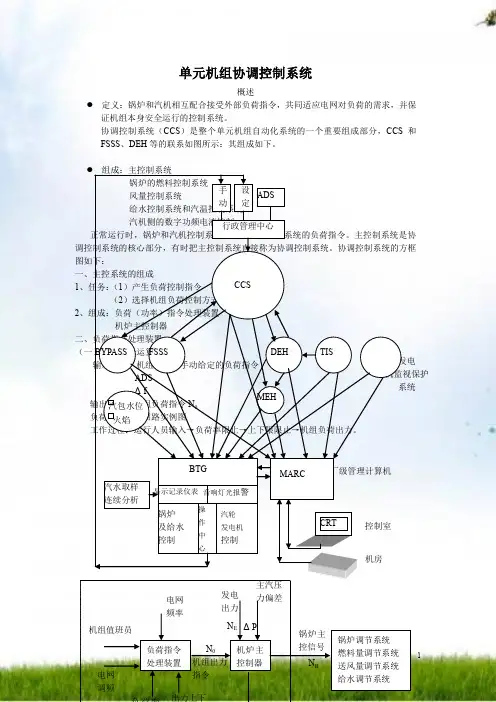
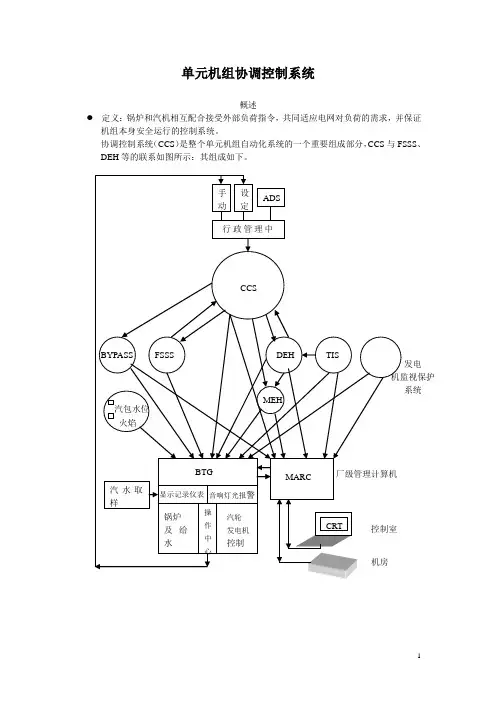
单元机组协调控制系统概述●定义:锅炉和汽机相互配合接受外部负荷指令,共同适应电网对负荷的需求,并保证机组本身安全运行的控制系统。
协调控制系统(CCS)是整个单元机组自动化系统的一个重要组成部分,CCS和FSSS、DEH等的联系如图所示:其组成如下。
(二)机组最大可能出力运算回路 ● 定义:考虑各种辅机的运行状况而计算出的机组出力。
● 机组最大可能出力运算回路原理图 (三)机组的允许最大负荷运算回路 ● 定义:考虑锅炉燃烧器等不可测故障时,使锅炉的实际出力达不到机组功率指令N 0的要求,而设置的机组负荷运算回路,简称返航回路。
● 返航回路的工作过程: (1)正常运行:N 允许=N 最大,4接通6 (2)大于5%的燃烧率,积分器2的输出为机组允许最大负荷信号。
运算过程示意图如下:图3 机组最大可能出力运算回路原理图图4 机组允许最大负荷运算过程示意图 U 2、U 3U 4、U 6分别为积分器2、反向器3、偏置器4和6的输出信号 τ0出现6%燃烧率偏差τ1监控器31动作时间,切换器5将燃烧率偏差信号直接送入偏置器4 τ2燃烧率偏差信号=1%,机组允许最大负荷信号停止下降,机组稳定 τ3、故障排除,燃烧率偏差信号<1%,积分器输入为正值,直至允许最大出力等于最大 (出力变化率限止) MW AM R .LMT ∑ ≯≮ ΔH/L f(x)P ± AM CPTR (计算机方式) (热应力控制) CPTR MW H/A 运行人员要求负荷指令 增 减 a a →跟踪方式c 负荷急 减警报 A B Δf(频率偏差) 增 减 出力下限值 出力上限值 机组负荷指令1、主控系统组成:负荷指令运算回路;机炉主控制器2、工作方式:7种● 基本方式(BASE )● 锅炉跟随1方式(BLR FLW1)● 锅炉跟随2方式(BLR FLW2)● 汽机跟随1方式(TURB FLW1)● 汽机跟随2方式(TURB FLW1) ● 以锅炉跟随为基础的协调控制方式(COORD BF )● 以汽机跟随为基础的协调控制方式(COORD TF ) (一)负荷指令运算回路(LDC(Load Demand Computer))结构原理1、功能:将各种负荷要求加工成机组实际可以接收的指令。
单元机组协调控制系统概述定义:锅炉和汽机相互配合接受外部负荷指令,共同适应电网对负荷的需求,并保证机组本身安全运行的控制系统。
协调控制系统(CCS)是整个单元机组自动化系统的一个重要组成部分,CCS与FSSS、DEH等的联系如图所示:其组成如下。
发电系统组成:主控制系统锅炉的燃料控制系统风量控制系统给水控制系统和汽温控制系统汽机侧的数字功频电液控制正常运行时,锅炉和汽机控制系统接受来自主控制系统的负荷指令。
主控制系统是协调控制系统的核心部分,有时把主控制系统直接称为协调控制系统。
协调控制系统的方框图如下:主控系统图1 单元机组协调控制系统方框图一、主控系统的组成1、任务:(1)产生负荷控制指令(2)选择机组负荷控制方式2、组成:负荷(功率)指令处理装置机炉主控制器二、负荷指令处理装置(一)负荷指令运算回路输入信号:机组值班员手动给定的负荷指令ADSΔf输出信号:机组负荷指令N0负荷指令处理回路实例图工作过程:运行人员输入→负荷率限止→上下限限止→机组负荷出力。
图2 负荷指令处理回路实例(二)机组最大可能出力运算回路● 定义:考虑各种辅机的运行状况而计算出的机组出力。
● 机组最大可能出力运算回路原理图 (三)机组的允许最大负荷运算回路● 定义:考虑锅炉燃烧器等不可测故障时,使锅炉的实际出力达不到机组功率指令N 0的要求,而设置的机组负荷运算回路,简称返航回路。
● 返航回路的工作过程:(1)正常运行:N 允许=N 最大,4接通6(2)大于5%的燃烧率,积分器2的输出为机组允许最大负荷信号。
运算过程示意图如下:(出力变化率限止)运行人员要求负荷指令负荷急 增 减图3 机组最大可能出力运算回路原理图图4 机组允许最大负荷运算过程示意图偏差信号 最大负荷时间τ燃烧率偏差,τ τ τ τ 0 0 0 0 0U 2U 3U 4U 603U 2、U 3、U 4、U 6分别为积分器2、反向器3、偏置器4和6的输出信号 τ0出现6%燃烧率偏差τ1监控器31动作时间,切换器5将燃烧率偏差信号直接送入偏置器4 τ2燃烧率偏差信号=1%,机组允许最大负荷信号停止下降,机组稳定τ3、故障排除,燃烧率偏差信号<1%,积分器输入为正值,直至允许最大出力等于最大可能出力。


一、单元机组协调控制系统(理论部分,仅供参考)1基本概念:1.1 协调控制系统:在单元机组控制系统的设计中,考虑锅炉和汽轮机的差异和特点,采取某些措施,让机炉同时按照电网负荷的要求变化,接受外部负荷的指令,根据主要运行参数的偏差,协调地进行控制,从而在满足电网负荷要求的同时,保持主要运行参数的稳定,这样的控制系统,称为协调控制系统。
1.2 协调控制系统是由负荷指令处理回路和机炉主控制回路这两部分组成。
负荷指令处理回路接受中央调度所指令、值班员指令和频率偏差信号,通过选择和运算,再根据机组的主辅机实际的运行情况,发出负荷指令。
机炉主控制回路除接受负荷指令信号外,还接受主蒸汽压力信号,根据这两个信号的偏差,改变汽轮机调节阀的开度和锅炉的燃烧率。
2协调控制协调的作用2.1负荷指令处理回路的作用:2.1.1该回路接受的外部指令是电网调度的负荷分配指令、机组运行人员改变负荷的指令、电网频率自动调整的指令。
根据机组运行状态和电网对机组的要求,选择一种或几种。
2.1.2限制负荷指令的变化率和起始变化幅度,根据机组变负荷的能力,规定对机组负荷要求指令的变化不超过一定速度,以及起始变化不超过一定幅度。
2.1.3限制机组最高和最低负荷。
2.1.4甩负荷保护,在机组辅机故障时,不管外部对机组的负荷要求如何,为保证机组继续运行,必须把负荷降到适当水平。
2.1.5根据机组的辅机运行状态,选择不同的运行工况。
2.2机炉主控制回路的作用:2.2.1经过处理得负荷指令Po,对锅炉调节系统和汽机调节系统发出协调的指挥信号锅炉指令Pb和汽机指令Pv2.2.2根据机组输出功率与负荷要求之间的偏差,决定不同的运行方式3协调控制系统的运行方式:3.1机炉协调控制方式:如下图所示,包括机组功率运算回路机组允许负荷能力运算回路功率限制回路:若负荷要求在机组所能承受的允许范围内,按负荷要求发出功率指令;否则,按机组允许负荷能力发出机组功率指令锅炉主控制器汽机主控制器3.2汽机跟随锅炉而汽机输出功率可调方式:这种调节方式,锅炉、汽机自动系统都投入,但不参加电网调频,调度所也不能直接改变机组的负荷。
单元机组协调控制系统概述定义:锅炉和汽机相互配合接受外部负荷指令,共同适应电网对负荷的需求,并保证机组本身安全运行的控制系统。
协调控制系统(CCS)是整个单元机组自动化系统的一个重要组成部分,CCS与FSSS、DEH等的联系如图所示:其组成如下。
组成:主控制系统锅炉的燃料控制系统风量控制系统给水控制系统和汽温控制系统汽机侧的数字功频电液控制正常运行时,锅炉和汽机控制系统接受来自主控制系统的负荷指令。
主控制系统是协调控制系统的核心部分,有时把主控制系统直接称为协调控制系统。
协调控制系统的方框图如下:主控系统图1 单元机组协调控制系统方框图一、主控系统的组成1、任务:(1)产生负荷控制指令(2)选择机组负荷控制方式2、组成:负荷(功率)指令处理装置机炉主控制器二、负荷指令处理装置(一)负荷指令运算回路输入信号:机组值班员手动给定的负荷指令ADSΔf输出信号:机组负荷指令N0负荷指令处理回路实例图工作过程:运行人员输入→负荷率限止→上下限限止→机组负荷出力。
图2 负荷指令处理回路实例(二)机组最大可能出力运算回路● 定义:考虑各种辅机的运行状况而计算出的机组出力。
● 机组最大可能出力运算回路原理图 (三)机组的允许最大负荷运算回路● 定义:考虑锅炉燃烧器等不可测故障时,使锅炉的实际出力达不到机组功率指令N 0的要求,而设置的机组负荷运算回路,简称返航回路。
● 返航回路的工作过程:(1)正常运行:N 允许=N 最大,4接通6(2)大于5%的燃烧率,积分器2的输出为机组允许最大负荷信号。
运算过程示意图如下:(出力变化率限止)运行人员要求负荷指令 负荷急 增 减图3 机组最大可能出力运算回路原理图图4 机组允许最大负荷运算过程示意图偏差信号 最大负荷时间τ燃烧率偏差,τ τ τ τ 0 0 0 0 0U 2U 3U 4U 603U 2、U 3、U 4、U 6分别为积分器2、反向器3、偏置器4和6的输出信号 τ0出现6%燃烧率偏差τ1监控器31动作时间,切换器5将燃烧率偏差信号直接送入偏置器4 τ2燃烧率偏差信号=1%,机组允许最大负荷信号停止下降,机组稳定τ3、故障排除,燃烧率偏差信号<1%,积分器输入为正值,直至允许最大出力等于最大可能出力。
单元机组协调控制系统第一节协调控制系统的基本概念随着电力工业的发展,高参数、大容量的火力发电机组在电网中所占的比例越来越大。
大容量机组的汽轮发电机和锅炉都是采用单元制运行方式。
所谓单元制就是由一台汽轮发电机组和一台锅炉所组成的相对独立的系统。
单元制运行方式与以往的母管制运行方式相比,机组的热力系统得到了简化,而且使蒸汽经过中间再热处理成为可能,从而提高了机组的热效率。
一、单元机组负荷控制的特点随着大容量机组在电网中的比例不断增大,以及因电网用电结构变化引起的负荷峰谷差逐步加大,大容量单元机组的运行方式也逐步发生了变化,过去常常只带固定负荷的大机组,现在也需求根据电网中心调度所的负荷需求指令和电网的频率偏差参与电网的调峰、调频,甚至在机组的某些主要辅机局部故障的情况下,仍然维持机组的运行。
在单元制运行方式中,锅炉和汽轮发电机既要共同保障外部负荷要求,也要共同维持内部运行参数(主要是主蒸汽压力)稳定。
单元机组输出的实际电功率与负荷要求是否一致,反映了机组与外部电网之间能量的供求平衡关系;而主蒸汽压力则反映了机组内部锅炉与汽轮发电机之间能量的供求平衡关系。
然而,锅炉和汽轮发电机的动态特性存在着很大差异,即汽轮发电机对负荷请求响应快,锅炉对负荷请求的响应慢,所以单元机组内外两个能量供求平衡关系相互间受到制约,外部负荷响应性能与内部运行参数稳定性之间存在着固有的矛盾,这是单元机组负荷控制中的一个最为主要的特点。
二、协调控制系统及其任务单元机组的协调控制系统(Coordinated Control Systen简称CCS)是根据单元机组的负荷控制特点,为解决负荷控制中的内外两个能量供求平衡关系而提出来的一种控制系统。
从广义上讲,这是单元机组的负荷控制系统。
它把锅炉和汽轮发电机作为一个整体进行综合控制,使其同时按照电网负荷需求指令和内部主要运行参数的偏差要求协调运行,即保证单元机组对外具有较快的功率响应和一定的调频能力,对内维持主蒸汽压力偏差在允许范围内。
单元机组协调控制系统概述定义:锅炉和汽机相互配合接受外部负荷指令,共同适应电网对负荷的需求,并保 证机组本身安全运行的控制系统。
协调控制系统(CCS 是整个单元机组自动化系统的一个重要组成部分,CCS 与 FSSSDEH 等的联系如图所示:其组成如下。
手设 动 定ADS行政管理中心逋 监视保护 系统汽包水位 汽水取样 连续分析I 示记录仪表音 亍响灯光报警锅炉 及给水 控制操 作 中 心汽轮发电机控制CCSPASS SSS TISDEH MEHMARC「级管理计算机火焰BTGCRT控制室机房组成:主控制系统锅炉的燃料控制系统风量控制系统给水控制系统和汽温控制系统汽机侧的数字功频电液控制正常运行时,锅炉和汽机控制系统接受来自主控制系统的负荷指令。
主控制系统是协调控制系统的核心部分,有时把主控制系统直接称为协调控制系统。
协调控制系统的方框图如下:主控系统图1单元机组协调控制系统方框图一、主控系统的组成1、任务:(1)产生负荷控制指令(2 )选择机组负荷控制方式2、组成:负荷(功率)指令处理装置机炉主控制器二、负荷指令处理装置(一)负荷指令运算回路输入信号:机组值班员手动给定的负荷指令ADS△ f输出信号:机组负荷指令NN负荷指令处理回路实例图工作过程:运行人员输入T负荷率限止T上下限限止T机组负荷出力。
增减(出力变化率限止)图2负荷指令处理回路实例(二) 机组最大可能出力运算回路定义:考虑各种辅机的运行状况而计算出的机组出力。
机组最大可能出力运算回路原理图(三) 机组的允许最大负荷运算回路定义:考虑锅炉燃烧器等不可测故障时,使锅炉的实际出力达不到机组功率指令 N o的要求,而设置的机组负荷运算回路,简称返航回路。
返航回路的工作过程:(1) 正常运行:N 允许=N 最大,4接通6(2) 大于5%勺燃烧率,积分器 2的输出为机组允许最大负荷信号。
运算过程示意图如下:运行人 员要求 负荷指 令减增I I-PR-I100% 24 n0% G21给水泵100%50%O 燃烧率偏差信号19 2364士A士A -1%-4%f回转式空气预热器100%13燃烧器221450%100%锅炉循环泵47%CU-33%Q25 凝结水泵0%310G100%dd50%■ <t -1LJ卓9—118G30%12机组最大可能出力1 "30 31AT允许最大负荷U、U3、U4、U6分别为积分器2、反向器3、偏置器4和6的输出信号T 0出现6%然烧率偏差T 1监控器31动作时间,切换器5将燃烧率偏差信号直接送入偏置器4T 2燃烧率偏差信号=1%机组允许最大负荷信号停止下降,机组稳定T 3、故障排除,燃烧率偏差信号V 1%积分器输入为正值,直至允许最大出力等于最大可能出力。
T 4监控器31将切换器5恢复到原位置,返航回路恢复原状态。
三、协调控制系统的基本类型1、以汽机跟随为基础的协调控制系统(1) 汽机跟随特点:功率响应慢,汽压波动小。
(2) 以汽机跟随为基础的协调控制的特点:设法利用锅炉蓄热,允许汽压在一定范围内波动。
(3) 系统原理图及方框图△p△ NW B(b)系统方框图图5 以汽机跟随为基础的协调控制系统2、以锅炉跟随为基础的协调控制系统(1)构成:在原有锅炉跟随控制系统基础上增加一个非线性元件而形成。
(2)系统原理图及方框图N o N E P o P TW T(a)系统原理图P o P TN o N EP o(b )系统方框图图6以锅炉跟随为基础的协调控制系统四、西屋机炉协调控制方案1、 主控系统组成:负荷指令运算回路;机炉主控制器2、 工作方式:7种基本方式(BASE锅炉跟随1方式(BLR FLW1 锅炉跟随2方式(BLR FLW2 汽机跟随1方式(TURB FLW1 汽机跟随2方式(TURB FLW1以锅炉跟随为基础的协调控制方式(COORD BF 以汽机跟随为基础的协调控制方式(COORD TFN oW B(a )系统原理图W TW BW TN E+二(一)负荷指令运算回路(LDC(Load Dema nd Computer))结构原理1、功能:将各种负荷要求加工成机组实际可以接收的指令。
负荷要求:运行人员设定的机组目标负荷;电网调度中心遥控目标负荷(ADS;机组异常工况对目标负荷的修正。
2、LDC原理框图(二)、机炉主控制器机炉主控制器是以协调控制原理为基础建立起来的单元机组主控制装置,它由锅炉控制回路和汽机控制回路组成,接受LDC送来的实际负荷指令LDC输出,经处理后发出要求机炉协调响应的锅炉主控指令 B. M和汽机主控指令T. M同时根据机组的运行状态,进行工作方式的自动或手动切换。
机炉主控制器原理框图如图11所示。
从图中可以看出,它接受的输入信号有:LDC输出指令、节流压力(机前压力或称主汽压力)设定信号TP. SP、节流压力(机前压力或称主汽压力)信号TP、电网频率校正信号Hk、机组总功率信号MW根据机组不同工况和运行要求,锅炉主控B、M和汽机主控T. M可具备不同的工作方式(共有7种工作方式),由此构成LDC不同的运行方式。
不同工作方式下的机炉主控制器结构由LDC输出、TP. SP及各个控制逻辑的状态确定,它们与工作方式的对应关系如表I。
表中给出的均是被选定工作方式在正常工作时的状态或数值,其中,LDC输出一栏中括号内的值ADS为远方工作方式(Remots Mode)时由负荷指令运算回路来的负荷指令;TP SP 一栏中括号内的值对应于滑压方式的情况;BMO 为锅炉主控制器输出(Boiler master Out nut ); VLVTP为汽机调节阀门开度VLV与TP SP汽机主控输岀图8基本方式下的机炉主控制器BASE BF TF 1 BF 2 TF 2 CC-BF CC-TF LDC 输出 MW VLVTP BMO Target (ADS) Target (ADS) Target (ADS) Target (ADS) TP.SP TPTarget (LDC) Target (LDC) Target (LDC) Target Target (LDC)TargetLDC 自动TrueTrue TrueTrue选择汽机跟踪 TrueTrueTrue选择汽机调整 TrueTrue选择锅炉跟踪 TrueTrueTrue选择锅炉调整TrueTrueTrueTrue固定和跟踪True值的乘积。
表1各种状态与工作方式的对应关系、各工作方式下的机炉主控制器1.基本方式(Base Mode )当锅炉主控和汽机主控均在手动控制方式时,机组处于基本工作方式,此时,信号和汽机主控信号跟踪其手动信号。
可以画出基本方式,机护主控制器的原理框图,如 图8所示:锅炉主控固定和跟踪汽机不在远控(T M )负荷参数(DEH 来的负荷基准)TP 、 SP=TPKMRELDC 输出'A/M 站 T4 Y2 •锅炉跟随方式(BF i)当锅炉主控自动和汽机主控手动时,机组将进入锅炉跟随1方式,此时,节流压力(机前压力)TP及其设定值TP.SP的偏差将送人锅炉节流压力控制器,控制器输出在加法器中与其功率前馈信号LDC输出相加,其输出经锅炉主控自动/手动站环节,得到锅炉主控信号BM汽机主控信号为LDC输出信号,这样由锅炉调节机前压力,汽机保证负荷要求。
可以画出锅炉跟随1方式下机炉主控制器的原理框图,如图9所示。
3、汽机跟随1方式(TF i)当锅炉主控手动和汽机主控自动时,机组处于汽机跟随1方式,此时,节流压力(机前压力)TP及其设定值TP.SP的偏差信号进入汽机节流压力控制器,LDC输出信号作为功率前馈信号,控制器输出经汽机主控自动/手动站环节,得到汽机主控信号T.M,锅炉主控信号为LDC输出信号,即由汽机调节机前压力,锅炉满足负荷要求。
可以画出汽机跟随1方式下机炉主控制器的原理框图,如图10所示。
TP、SP=TPLDC 输出4、锅炉跟随2方式(BF2)这种方式与BF方式类似,机前压力仍由锅炉控制器调节,LDC输出信号经电网频率偏差信号校正后作为其功率前馈信号,仍由汽机保证负荷要求,汽机主控信号为LDC输出信号。
可以画出锅炉跟随2方式下机炉主控制器的原理框图,如图11所示。
LDC 输岀 频率校正 TP 、 SP=TP5 •汽机跟随2方式(TF 2)TF 2方式由汽机调节机前压力,LDC 输出信号作为其功率前馈信号, 求,LDC 输出信号经电网频差信号校正后作为锅炉主控信号2方式下机炉主控制器的原理框图,由锅炉满足负荷要图12 TF2方式下的机炉主控制器可以画出汽机跟随如图12所示。
汽机主控输岀锅炉主控输岀6、以汽机跟随为基础的协调控制方式(CC-TF)CC- TF方式仍由汽机调节机前压力,LDC输出信号作为其前馈信号,由发电机来的实发功率信号MW与其设定值LDC输出信号比较后,偏差信号送入功率控制器,控制器输出与经电网频率偏差信号校正后的LDC输出信号相加,最后得到锅炉主控信号,即由锅炉控制回路调节功率变化,满足负荷要求。
可以画出以汽机跟随为基础的协调控制方式下机炉主控制器的原理图,如图13所示。
7、以锅炉跟随为基础的协调控制方式(CC- BF)这种方式由锅炉调节机前压力,LDC输出信号经电网频率偏差信号校正后作为其功率前馈信号,由汽机调节功率以满足负荷要求。
可以画出以锅炉跟随为基础的协调控制方式下机炉主控制器的原理框图,见图图14: CC-BF 方式下机炉主控制器上述BF 2、TF 2、CC-TF 、CC- BF 方式中,方案设计有一次调频功能,DEH 来的汽机转速信号经一函数环节 f (x ),得到频率校正信号与实际负荷指令LDC 输出相加,使机组参与电网一次调频,这样在电网二次调频之前就可以减小电网频率变化的幅度,提高机组的 负荷适应能力。
若机组处于远方(Remote ) ADS 方式,这种控制方式和就地方式( BF i 、TF i 、BF z 、TF 2、 CC-TF 、CC- BF 方式中任一种)一样操作,只是此时目标负荷由电网调度ADS 设定,负荷变化速率由ADS 增加/减少速率决定。
二、机护主控制器工作方式的切换根据机组状态和负荷要求,机组运行中可能要改变工作方式,即从一种工作方式转换到另一种工作方式,转换过程中必须避免不必要的扰动各种工作方式转换的关系工作方式的转换有两种,一种是运行人员手动切换,另一种是自动切换。
1、手动切换设计中还考虑了用于实现滑压/定压、远方/就地的方式转换请求按键; 锅炉主控自动/手动操作站“ BOILER MASTER // M STATION ;汽机主控自动/手动操作站“ TURBINEMASTERAMSTATION 。
工作方式转换的方向•根据手动切换关系,可以把7种工作方分为3个级,即低级方式,包括BASE 方式、BF 1方式和TF 方式;中级方式包括 BE 方式和TF 2方式;高级方式包 括CC- BF 方式和CC- TF 方式.在低级方式中,BASE 方式是最基本的工作方式。