机器人手部结构详解及大量结构图
- 格式:doc
- 大小:5.18 MB
- 文档页数:29
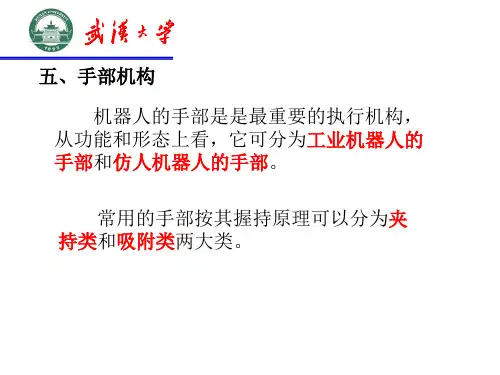
机器人机械手爪综述目录一、夹钳式手部设计的基本要求 (3)二、典型机械爪结构 (4)1)回转型 (4)2)移动型 (5)三、夹钳式手部的计算与分析 (9)1)夹紧力的计算 (9)2)夹紧缸驱动力计算 (11)3)计算步骤 (12)4)手爪的夹持误差分析与计算 (12)四、常用气爪 (17)1)气动手指气缸具有如下特点: (17)2)气动手指气缸主要类型与型号 (18)工业机器人的手部(亦称机械爪或抓取机构)是用来直接握持工件的部件,由于被握持工件的形状、尺寸大小、重量、材料性能、表面状况等的不同,所以工业机械手的手部结构是多种多样的,大部分的手部结构是根据特定的工件要求而设计的。
常用的手部,按其握持工件的原理,大致可分成夹持和吸附两大类。
夹持类常见的主要有夹钳式,此外还有钩托式和弹簧式。
夹持类手部按其手指夹持工件时的运动方式,可分为手指回转型和手指平移型两种,如图1所示。
吸附类中,有气吸式和磁吸式。
a)回转型内撑式b)回转型外夹式c)平移型外夹式d)钩托式e)弹簧式f)气吸式g)磁吸式图1 机械爪类型夹钳式手部是由手指、传动机构和驱动装置三部分组成的,它对抓取各种形状的工件具有较大的适应性,可以抓取轴、盘、套类零件。
一般情况下,多采用两个手指,少数采用三指或多指。
驱动装置为传动机构提供动力,驱动源有液压、气动和电动等几种形式。
常见的传动机构往往通过滑槽、斜楔、齿轮齿条、连杆机构实现夹紧或松开。
平移型手指的张开闭合靠手指的平行移动,适于夹持平板、方料。
在夹持直径不同的圆棒时,不会引起中心位置的偏移。
但这种手指结构比较复杂、体积大,要求加工精度高。
回转型手指的张开闭合靠手指根部(以枢轴支点为中心)的回转运动来完成。
枢轴支点为一个的,称为单支点回转型;为两个的,称为双支点回转型。
这种手指结构简单,形状小巧,但夹持不同工件会产生夹持定位偏差。
a)单支点回转型b)双支点回转型C)平移型(平直指)图2 回转型和平移型手指一、夹钳式手部设计的基本要求1. 应具有适当的夹紧力和驱动力。
回转型图例
平动型图例
用作图法分析当主动件左移才处于某个位置时,手指所处的位置。
平移型图例
⏹手指式:
⏹外夹式、内撑式、内外夹持式。
⏹平移式、平动式、旋转式。
⏹二指式、多指式。
⏹单关节式、多关节式。
⏹吸盘式:
⏹负压吸盘:真空式、喷气式、挤气式。
⏹磁力吸盘:永磁吸盘、电磁吸盘。
可用来吸附鸡蛋、锥颈瓶等物件。
扩大了真空吸盘在机器人上的应用。
回转动力源1和6驱动构件2和5顺时针或逆时针旋转,通过平行四边形机构带动手指3和4作平动,夹紧或释放工件。
手爪装有限位开关5和7。
在指爪4沿垂直方向接近工件6的过程中,限位开关检测手爪与工件的相对位置。
当工件接触限位开关时发信号,汽缸通过连杆3驱动指爪夹紧工件。