机器人手部结构详解及大量结构图
- 格式:doc
- 大小:5.21 MB
- 文档页数:29

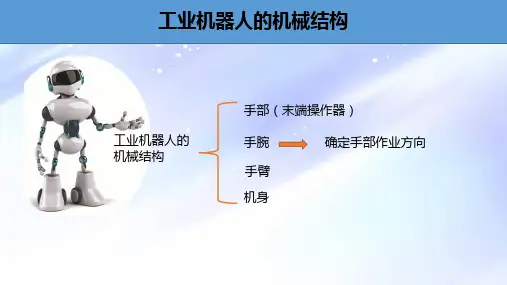

1、定义:腕部是臂部和手部的连接件,起支承手部和改变手部姿态的作用。
2、手腕的自由度:⏹为了使手部能处于空间任意方向,要求腕部能实现对空间三个坐标轴X、Y、Z的旋转运动。
这便是腕部运动的三个自由度,分别称为翻转R(Roll)、俯仰P(Pitch)和偏转Y(Yaw)。
⏹并不是所有的手腕都必须具备三个自由度,而是根据实际使用的工作性能要求来确定。
腕部坐标系手腕的偏转手腕的仰俯手腕的回转3、手腕的设计要求⏹结构紧凑、重量轻;⏹动作灵活、平稳,定位精度高;⏹强度、刚度高;⏹与臂部及手部的连接部位的合理连接结构,传感器和驱动装置的合理布局及安装等。
4、手腕的分类(1)二自由度手腕:可以由一个R关节和一个B关节联合构成BR关节实现,或由两个B关节组成BB关节实现,但不能由两个RR关节构成二自由度手腕,因为两个R关节的功能是重复的,实际上只起到单自由度的作用。
BR手腕BB手腕RR手腕(属于单自由度)(2)三自由度手腕:有R关节和B关节的组合构成的三自由度手腕可以有多种型式,实现翻转、俯仰和偏转功能。
BBR手腕BRR手腕5.按手腕的驱动方式分:⏹直接驱动手腕:⏹驱动源直接装在手腕上。
这种直接驱动手腕的关键是能否设计和加工出尺寸小、重量轻而驱动扭矩大、驱动性能好的驱动电机或液压马达。
⏹远距离传动手腕:⏹有时为了保证具有足够大的驱动力,驱动装置又不能做得足够小,同时也为了减轻手腕的重量,采用远距离的驱动方式,可以实现三个自由度的运动。
液压直接驱动BBR手腕图例远距离传动手腕图例6、典型结构(1)摆动液压缸(又称回转液压缸):⏹结构:⏹由缸体、隔板、叶片、花键套等主要部件构成。
其中叶片7固定在转子上,用花键将转子与驱动轴连接,用螺栓2将隔板与缸体连接。
⏹工作原理:⏹在密封的缸体内,隔板与活动叶片之间围成两个油腔,相当油缸中的无杆腔和有杆腔。
液压力作用在活动叶片的端面上,对传动轴中心产生力矩使被驱动轴转动。
摆动缸转角在270°左右。
机器人手部结构详解机器人手是指机器人的末端执行器件,负责具体的抓取、控制、操作等任务。
机器人手的结构设计直接关系到机器人的功能和性能,因此机器人手的结构设计是机器人技术领域中的一个重要研究方向。
机器人手的结构通常由手指、关节、驱动器和传感器等组成。
手指是机器人手部的关键部位,通过手指可以实现抓取、握持、操纵等功能。
手指通常由多个关节连接而成,通过关节的灵活运动,实现对目标物体的精确控制。
机器人手的关节通常采用伺服驱动器或步进驱动器来实现精确的控制。
伺服驱动器通过反馈控制系统,可以实现对关节位置、速度和力矩的精确控制,使机器人手能够完成复杂的操作任务。
步进驱动器则通过精确的步进运动控制,实现关节的位置控制,适用于一些简单的操作任务。
机器人手的传感器通常包括力传感器、触觉传感器和位置传感器等。
力传感器可以测量机器人手对物体施加的力或力矩,从而实现对力的感知和控制。
触觉传感器可以模拟人手的触觉感知功能,使机器人手能够感知物体的质量、硬度、形状等特征。
位置传感器用于测量机器人手的位置和姿态,实现对手指和关节的精确控制。
机器人手的结构设计不仅要考虑功能和性能,还要满足实际应用的需求。
例如,在工业机器人中,机器人手通常需要具备高负载、高速度和高精度的特点;在服务机器人中,机器人手需要具备轻巧、柔软和安全的特点,以适应不同的环境和任务。
随着机器人技术的不断发展和应用的不断扩大,机器人手的结构设计也在不断创新和进化。
一些新兴的结构设计包括柔性手指、并联机构和生物启发式结构等。
柔性手指是一种利用柔性材料构造的手指,具有良好的柔软性和适应性。
柔性手指可以通过变形来适应不同形状和大小的物体,具有良好的握持能力和抓取精度。
并联机构是一种由多个并联连接的杆件和关节组成的手指结构,通过并联机构的运动,可以实现更高的载荷和更大的工作空间。
生物启发式结构则是借鉴生物的结构和运动原理,设计具有类似生物手的机器人手,具有更强的适应性和灵活性。
回转型图例
平动型图例
用作图法分析当主动件左移才处于某个位置时,手指所处的位置。
平移型图例
⏹手指式:
⏹外夹式、内撑式、内外夹持式。
⏹平移式、平动式、旋转式。
⏹二指式、多指式。
⏹单关节式、多关节式。
⏹吸盘式:
⏹负压吸盘:真空式、喷气式、挤气式。
⏹磁力吸盘:永磁吸盘、电磁吸盘。
可用来吸附鸡蛋、锥颈瓶等物件。
扩大了真空吸盘在机器人上的应用。
回转动力源1和6驱动构件2和5顺时针或逆时针旋转,通过平行四边形机构带动手指3和4作平动,夹紧或释放工件。
手爪装有限位开关5和7。
在指爪4沿垂直方向接近工件6的过程中,限位开关检测手爪与工件的相对位置。
当工件接触限位开关时发信号,汽缸通过连杆3驱动指爪夹紧工件。
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求。
回转型图例
平动型图例
用作图法分析当主动件左移才处于某个位置时,手指所处的位置。
平移型图例
⏹手指式:
⏹外夹式、内撑式、内外夹持式。
⏹平移式、平动式、旋转式。
⏹二指式、多指式。
⏹单关节式、多关节式。
⏹吸盘式:
⏹负压吸盘:真空式、喷气式、挤气式。
⏹磁力吸盘:永磁吸盘、电磁吸盘。
可用来吸附鸡蛋、锥颈瓶等物件。
扩大了真空吸盘在机器人上的应用。
回转动力源1和6驱动构件2和5顺时针或逆时针旋转,通过平行四边形机构带动手指3和4作平动,夹紧或释放工件。
手爪装有限位开关5和7。
在指爪4沿垂直方向接近工件6的过程中,限位开关检测手爪与工件的相对位置。
当工件接触限位开关时发信号,汽缸通过连杆3驱动指爪夹紧工件。