薄透镜系统的初级像差
- 格式:pptx
- 大小:847.91 KB
- 文档页数:55
1.6像差理论1.6.1非理想光学系统和像差所谓理想光学系统,就是能够对任意大的空间以任意宽的光束成完善像的光学系统。
一个物体发出的光经过理想光学系统后将产生一个清晰的、与物貌完全相似的像。
理想光学系统具有下述性质:①光学系统物方一个点(物点)对应像方一个点(像点),这两个点称为共轭点。
②物方每条直线对应像方的一条直线,称共轭线;物方每个平面对应像方的一个平面,称为共轭面。
③主光轴上任一点的共轭点仍在主光轴上。
任何垂直于主光轴的平面,其共轭面仍与主光轴垂直。
④对垂直于主光轴的共轭平面,横向放大率为常量。
实际中不存在真正的理想光学系统,平面反射镜是个例外,但其横向放大率恒为1。
虽然在近轴区域共轴球面系统可近似地满足理想光学系统的要求,但是实际光学系统成像都是需要一定大小的成像空间以及光束孔径的,同时还由于成像光束多是由不同颜色的光组成(同一种介质的折射率随波长而异)。
所以实际的光学系统成像都不是理想的,存在着一系列缺陷,这就是像差。
像差是指在光学系统中由透镜材料的特性或折射率(或反射)表面的集合形状引起实际像与理想像的偏差。
用高斯公式、牛顿公式或近轴光线追迹计算得到的像的位置和大小可以作为理想像的位置和大小,而实际光线追迹计算得到的像的位置和大小相对于理想像的偏差就可以作为像差的量度。
描述像差可以用几何像差和波像差(又叫光程差),本设计主要使用几何像差。
1.6.2几何像差[2]几何像差主要有七种:其中单色像差有五种,即球差、彗差、像散、场曲和畸变;复色光成像像差有轴向色差和垂轴色差两种。
1.6.2.1球差如图1-8表示的是轴上有限远同一物点发出的不同孔径的光线通过系统后不再交于一点,成像不理想。
为了表示这些对称光线在光轴方向上的离散程度,我们用不同孔径的光线对理想像点'0A 的距离''0 1.0A A 、''0.85A A …表示,称为球差。
球差是球面像差的简称,是由光学系统的口径而引起的,是光学系统口径的函数。
第三篇光学系统设计光学仪器的基本功能是借助于光学原理,通过光学系统来实现的。
光学系统的优劣直接影响仪器的性能和质量,因此,光学系统设计是光学仪器设计和制造过程中的重要一环。
本部分的目的是使读者获得光学设计所需要的基本理论和知识,并通过必要的设计实践以掌握光学设计的初步能力。
光学设计工作大体上可分四个阶段:一、根据仪器的技术参数和要求,考虑和拟定光学系统的整体方案,并计算其中各个具有独立功能的组成部分的高斯光学参数;二、选择各组成部分的结构型式,并查取或计算其初始结构参数;三、逐次修改结构参数,使像差得到最佳的校正和平衡;四、对设计结果进行评价。
上述各个阶段性工作之间有着密切的联系,前期工作的合理与否会影响到后期工作能否顺利进行,甚至会决定设计工作能否成功。
光学系统的整体方案可以有很大的灵活性和多样性,应该力求在满足仪器的性能要求的前提下,寻求一个简单易行、便于装调和经济合理的最佳方案。
相应地,系统各组成部分的光学性能参数也应根据整体要求定得恰如其分。
选择结构型式是光学设计中的重要一步,可能导致设计的成败。
现在,各种用途的光学镜头已积累起种类甚多的结构型式,它们有各自的像差特征和在保证像质时可能达到的相对孔径和视场,有些型式还能在工作距离或镜筒长度等参数方面达到其特殊要求。
因此,基于对已有结构型式基本特征的全面了解,有可能挑选到符合要求的型式。
但应注意到,随着对镜头要求的不断提高,设计者还应不断探求和研究新的更佳结构。
镜头初始参数的获得一般采用二种方法,一是根据初级像差理论求解满足初级像差要求的解,另一种方法是在已有的设计成果中选取性能参数相当的结果作为初始参数。
像差的平衡是一项通过反复修改结构参数以逐步逼近最佳结果的工作,这在过去以人工计算光路时,工作量是很大的。
计算机应用于光学设计后,先是取代了繁重的光路计算,随后又用于像差自动平衡,才根本上改变了光学设计的面貌。
应用像差自动平衡方法,能充分挖掘出系统各个结构参数对像差校正的潜力,不仅极大地加快了设计进程,而且显著提高了设计质量。
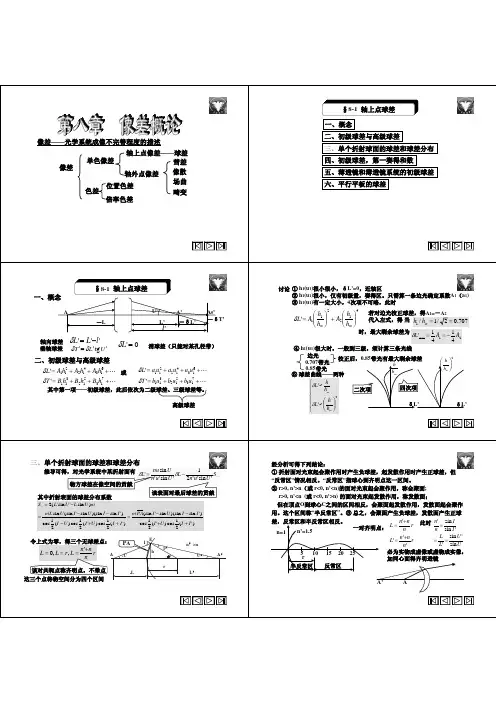
1.6.3薄透镜系统的初级像差理论[2]1.6.3.1初级像差理论在像差理论中,把各项像差和物高y (或视场角ω)、光束孔径h (或孔径角u )的关系用幂级数的形式表示出来。
把最低次幂对应的像差量称为初级像差,而把较高次幂对应的像差量称为高级像差。
初级像差理论忽略了y 及h 的高次项,在y 及h 均不大的情况下,初级像差理论能够很好的近似代表光学系统的像差性质,为研究和设计工作带来极大的方便。
1.6.3.2薄透镜系统的初级像差方程组如果一个透镜组的厚度和它的焦距比较可以忽略,这样的透镜组称为薄透镜组。
由若干个薄透镜组组成的系统,称为薄透镜系统(透镜组间的间隔是可以任意的)。
对这样的系统在初级像差的范围内,可以建立像差和系统结构参数之间的直接函数关系。
如图1-16为一个简单的薄透镜系统示意图。
我们取两条辅助光线:第一辅助光线是由轴上点发出的经过孔径边缘的光线,它在第i 个透镜上的投射高为i h ;第二辅助光线是轴外点发出的经过孔径中心的光线,它在第i 个透镜上的投射高为zi h 。
而且第i 个透镜的光焦度也是已知的为i ϕ。
每个透镜组的i h 、zi h 和i ϕ叫做透镜组的外部参数,都是已知的,和薄透镜组的具体结构无关;对应的,每个透镜组的i r 、i d 、i n 称为透镜组的内部结构参数。
像差既和外部结构参数有关也和内部结构参数有关。
薄透镜系统初级像差方程组的作用是把系统中各个薄透镜组已知的完部参数和未知的内部结构参数与像差的关系分离开来,便于研究。
下面是各像差和数公式:球差和数''2'2[]i i iS nu L h p δI =-=∑(1-17)弧矢彗差和数'''2[]S zi i i iiS n u K h p J W II =-=-∑∑(1-18)像散和数2''2'2[2]zi zi tsi i i i i ii ih hS n u x p J W Jh h ϕIII =-=-+∑∑∑(1-19)像弯和数 2''2'22[2(1)]z i z iV Pi ii i i i iii h h S n u x p J W J h h ϕμI =-=-++∑∑∑ (1-20)畸变和数 32'''2222[3(3)]ziziziV zi i i i i i i iiih h h S n u y p JW J h h h δϕμ=-=-++∑∑∑ (1-21)轴向色差和数''2'2[]C FC i i iS n u L h C I =-∆=∑(1-22)垂轴色差和数'''[]C FC zi i i iS n u y h hC II =-∆=∑ (1-23)其中,'n 、'u 为系统最后像空间的折射率和孔径角,'''J nu y =是系统的拉格朗日不变量,他们以及每个透镜组的外部参数i h 、zi h 和i ϕ可以当成已知常数,在方括号里的求和式∑中,每个透镜组对应一项。
光学课程设计——望远镜系统结构设计姓名:学号:班级:指导老师:一、设计题目:光学课程设计二、设计目的:运用应用光学知识,了解望远镜工作原理的基础上,完成望远镜的外形尺寸、物镜组、目镜组及转像系统的简易或原理设计。
了解光学设计中的PW法基本原理。
三、设计原理:光学望远镜是最常用的助视光学仪器,常被组合在其它光学仪器中。
为了观察远处的物体,所用的光学仪器就是望远镜,望远镜的光学系统简称望远系统. 望远镜是一种用于观察远距离物体的目视光学仪器,能把远物很小的张角按一定倍率放大,使之在像空间具有较大的张角,使本来无法用肉眼看清或分辨的物体变清晰可辨。
所以,望远镜是天文和地面观测中不可缺少的工具。
它是一种通过物镜和目镜使入射的平行光束仍保持平行射出的光学系统.其系统由物镜和目镜组成,当观察远处物体时,物镜的像方焦距和目镜的物方焦距重合,光学间距为零.在观察有限远的物体时,其光学间距是一个不为零的小数量,一般情况下,可以认为望远镜是由光学间距为零的物镜和目镜组成的无焦系统.常见望远镜按结构可简单分为伽利略望远镜,开普勒望远镜,和牛顿式望远镜。
常见的望远镜大多是开普勒结构,既目镜和物镜都是凸透镜(组),这种望远镜结构导致成像是倒立的,所以在中间还有正像系统。
物镜组(入瞳)目镜组视场光阑出瞳1'1ω2'2'ω3 'f物—f目'l z'3上图为开普勒式望远镜,折射式望远镜的一种。
物镜组也为凸透镜形式,但目镜组是凸透镜形式。
为了成正立的像,采用这种设计的某些折射式望远镜,特别是多数双筒望远镜在光路中增加了转像稜镜系统。
此外,几乎所有的折射式天文望远镜的光学系统为开普勒式。
伽利略望远镜是以会聚透镜作为物镜、发散透镜作为目镜的望远镜(会聚透镜的焦距要大于发散透镜的焦距),当远处的物体通远物镜(u>2f )在物镜后面成一个倒立缩小的实像,而这个象一个要让它成现在发散透镜(目镜)的后面即靠近眼睛这一边,当光线通过发散透镜时,人就能看到一个正立缩小的虚象。
开普勒望远镜设计摘要 简述了望远镜的结构和作用,介绍了开普勒望远镜的具体结构和工作原理,根据提供的开普勒望远镜的主要参数设计出开普勒望远镜的外形尺寸。
针对物镜和目镜给出了具体的参数设计。
考虑到实际应用,增加了转像系统的设计。
最终对光学系统进行了像质评价。
关键词 开普勒望远镜 像差 Matlab 光学设计一 概述1.1 课程设计的目的(1)课程知识的综合运用:综合运用已经学过的理想光学系统理论、光束限制理论和像差理论,进行实际光学系统的外形尺寸计算,为光学设计打下良好基础。
(2)促进协助和自学能力的提高:通过小组共同研究,促进学生团结协助精神的培养。
同时培养学生查阅资料及自学能力。
1.2 课程设计的内容开普勒望远镜典型光学系统的外形尺寸计算与分析。
根据要求画出系统光路图,标识系统结构、光束限制和成像典型光线。
设计思路、分析步骤和设计过程齐全,设计合理,结果可靠。
1.3题意重述开普勒望远镜是最简单的望远镜系统,已知数据,视觉放大率6Γ=-,视场角26ω=,出瞳直径4D mm '=,机械筒长168L mm =;画出系统光路图,并计算开普勒望远镜的外形尺寸:(提示:目镜可选用凯涅尔型,其后工作距2F l '和焦距2f '有如下近似关系:220.35F l f ''≈;前工作距28.6F l mm =。
)二开普勒望远镜的设计2.1开普勒望远镜介绍望远镜是一种利用凹透镜和凸透镜观察远距离物体的目视光学器件,物体光线通过透镜经过折射和反射进入小孔并会聚成像,再经过一个放大目镜而被人眼看到。
望远镜可以把物镜收集到的比瞳孔直径粗得多的光束送入人眼,使观测者能看到原来看不到的暗弱物体。
望远镜可以放大远处物体的张角,能把远处的物体很小的张角按一定倍率放大,使之在像空间具有较大的张角,使本来无法用肉眼看清或分辨的物体变得清晰可辨。
所以,望远镜是天文和地面观测不可或缺的工具。
开普勒望远镜是开普勒在1611年发明的。