遥控小汽车电路图
- 格式:doc
- 大小:183.50 KB
- 文档页数:5
自制无线遥控小汽车电路图PT2262 无线发射PT2272 无线接收T10A发射模块XY-R04A接收模块无线遥控发射和接受原理图编码芯片PT2262 发出的编码信号由:地址码、数据码、同步码组成一个完整的码字,解码芯片PT2272 接收到信号后,其地址码经过两次比较核对后,VT 脚才输出高电平,与此同时相应的数据脚也输出高电平,如果发送端一直按住按键,编码芯片也会连续发射。
当发射机没有按键按下时,PT2262 不接通电源,其17 脚为低电平,所以315MHz 的高频发射电路不工作,当有按键按下时,PT2262 得电工作,其第17 脚输出经调制的串行数据信号,当17 脚为高电平期间315MHz 的高频发射电路起振并发射等幅高频信号,当17 脚为低平期间315MHz 的高频发射电路停止振荡,所以高频发射电路完全收控于PT2262 的17 脚输出的数字信号,从而对高频电路完成幅度键控(ASK 调制)相当于调制度为100%的调幅。
PT2262和PT2272除地址编码必须完全一致外,振荡电阻还必须匹配,一般要求译码器振荡频率要高于编码器振荡频率的2.5~8倍,否则接收距离会变近甚至无法接收,随着技术的发展市场上出现一批兼容芯片,在实际使用中只要对振荡电阻稍做改动就能配套使用。
在具体的应用中,外接振荡电阻可根据需要进行适当的调节,阻值越大振荡频率越慢,编码的宽度越大,发码一帧的时间越长。
市场上大部分产品都是用2262/1.2M=2272/200K 组合的,少量产品用2262/4.7M=2272/820K。
解码接收模块包括接收头和解码芯片PT2272两部分组成。
接收头将收到的信号输入PT2272的14脚(DIN),PT2272再将收到的信号解码。
接收板工作电压为DC 5V,接收灵敏度:-103dBm ,尺寸(mm):49*20*7 ,工作频率:315MHz,工作电流:5mA ,编码类型:固定码(板上焊盘跳接设置) 应用说明:与各类型遥控器配合使用,解码输出后进行相应控制,在通常使用中,我们一般采用8位地址码和4位数据码,这时编码芯片PT2262和解码芯片PT2272的第1~8脚为地址设定脚,有三种状态可供选择:悬空、接正电源、接地三种状态,地址编码不重复度为38=6561组,只有发射端PT2262和接收端PT2272的地址编码完全相同,才能配对使用,遥控模块的生产厂家为了便于生产管理,出厂时遥控模块的PT2262和PT2272的八位地址编码端全部悬空,这样用户可以很方便选择各种编码状态,用户如果想改变地址编码,只要将PT2262和PT2272的1~8脚设置相同即可,例如将发射机的PT2262的第2脚接地,第3脚接正电源,其它引脚悬空,那么接收机的PT2272只要也第2脚接地,第3脚接正电源,其它引脚悬空就能实现配对接收。
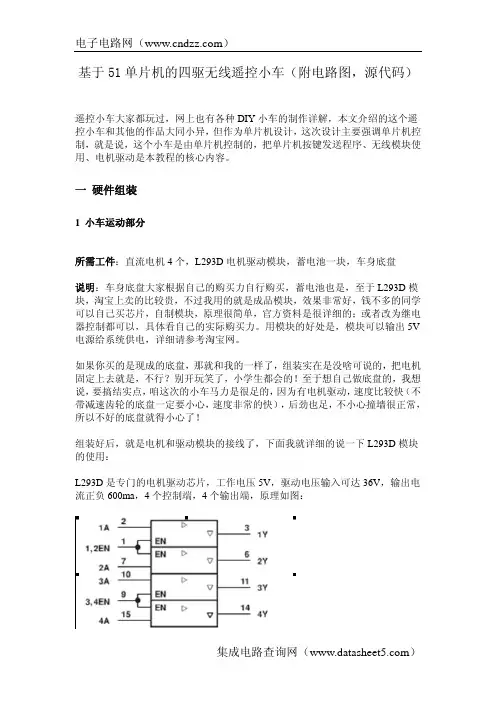
基于51单片机的四驱无线遥控小车(附电路图,源代码)遥控小车大家都玩过,网上也有各种DIY小车的制作详解,本文介绍的这个遥控小车和其他的作品大同小异,但作为单片机设计,这次设计主要强调单片机控制,就是说,这个小车是由单片机控制的,把单片机按键发送程序、无线模块使用、电机驱动是本教程的核心内容。
一硬件组装1 小车运动部分所需工件:直流电机4个,L293D电机驱动模块,蓄电池一块,车身底盘说明:车身底盘大家根据自己的购买力自行购买,蓄电池也是,至于L293D模块,淘宝上卖的比较贵,不过我用的就是成品模块,效果非常好,钱不多的同学可以自己买芯片,自制模块,原理很简单,官方资料是很详细的;或者改为继电器控制都可以,具体看自己的实际购买力。
用模块的好处是,模块可以输出5V 电源给系统供电,详细请参考淘宝网。
如果你买的是现成的底盘,那就和我的一样了,组装实在是没啥可说的,把电机固定上去就是,不行?别开玩笑了,小学生都会的!至于想自己做底盘的,我想说,要搞结实点,咱这次的小车马力是很足的,因为有电机驱动,速度比较快(不带减速齿轮的底盘一定要小心,速度非常的快),后劲也足,不小心撞墙很正常,所以不好的底盘就得小心了!组装好后,就是电机和驱动模块的接线了,下面我就详细的说一下L293D模块的使用:L293D是专门的电机驱动芯片,工作电压5V,驱动电压输入可达36V,输出电流正负600ma,4个控制端,4个输出端,原理如图:其中A为输出控制端,Y为输出控制端,1A即控制1Y,以此类推。
1,2EN 3,4EN需要短接,芯片最大工作电压不得超过7V。
封装图:Vcc1接工作电压,5V,Vcc2接电机的驱动电源,一般来说,这个电压要比5V 高,我用的是12V蓄电池,就把12v的正极接到VCC2,要记住的是,芯片、单片机、蓄电池电源是需要共地的,不要觉得你电机是12V,单片机控制部分是5V就把电源完全独立开来,正极是完全独立的没错,但是GND(负极)都必须是接在一起的。
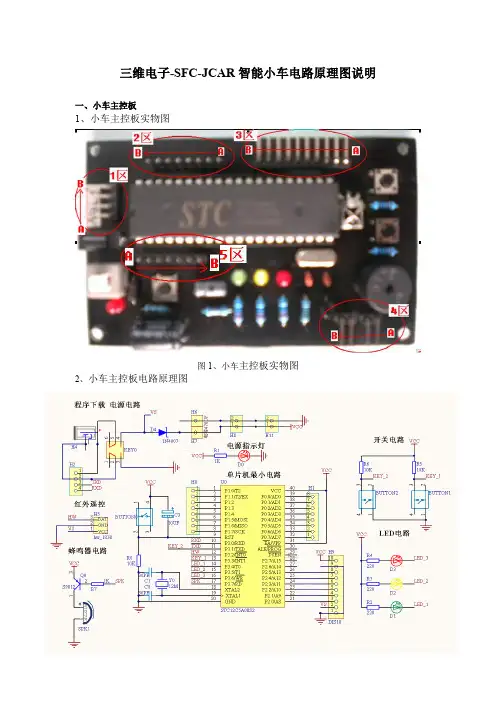
三维电子-SFC-JCAR智能小车电路原理图说明一、小车主控板1、小车主控板实物图图1、小车主控板实物图2、小车主控板电路原理图图2、小车主控板电路原理图3、电路原理图说明程序下载电源电路H2接口为程序下载接口对应实物图1区,1-4号引脚分别电源正极、电源负极、TXD、RXD,电源正极与负极与电源插座通过带锁开关给整个控制板提供电源,下载程序时USB下载器为单片机提供下载程序所需要的电源,使用时外接电池提供工作电源。
经过带锁开关有一个VS接口,该接口主要给电机电源引脚提供,二极管与H7和H6接口连接的470UF的电容起隔离的作用,H8和H9接口为电源扩展引脚对应于实物图的4区与VCC和GND连接在一起为单片机及外设电路提供电源,带锁开关释放的时候电源指示灯熄灭,带锁开关闭合时电源指示灯点亮。
红外遥控传感器的中间引脚2号引脚为数据传输口与单片机P3.2引脚连接。
蜂鸣器电路的控制引脚与单片机P3.7引脚连接。
按键电路的两个按键信号输出引脚分别与与单片机P3.1和P3.3引脚连接。
LED电路3个控制引脚分别于单片机P3.4 P3.5 P3.6引脚连接。
二、L298N电机驱动模块1、L298N电机驱动模块实物图图3、L298N电机驱动模块实物图2、L298N电机驱动模块电路原理图图4、L298N电机驱动模块电路原理图2、电路原理图说明电路原理图左边H0接口1号-10号引脚对应实物图标号1区从下到上(从A到B)的十个引脚,其中1号和9号引脚接地,2号引脚为VS(给电机供电的电源),10号引脚为VSS表示逻辑电压正极(与控制芯片正极连接在一起)。
3-5号控制一号电机输入端,6-8号控制二号电机的输入端。
电路原理图右边H3和H2为两个电机控制输出端。
三、寻迹避障电路1、寻迹避障电路实物图图5、寻迹避障电路实物图2、寻迹避障电路电路原理图图5、寻迹避障电路电路原理图2、电路原理图说明电源同上电以后7个红外发光二极管同时点亮,接收二极管根据前面物体的距离和演示接收不同程度的放射回来的红外线。
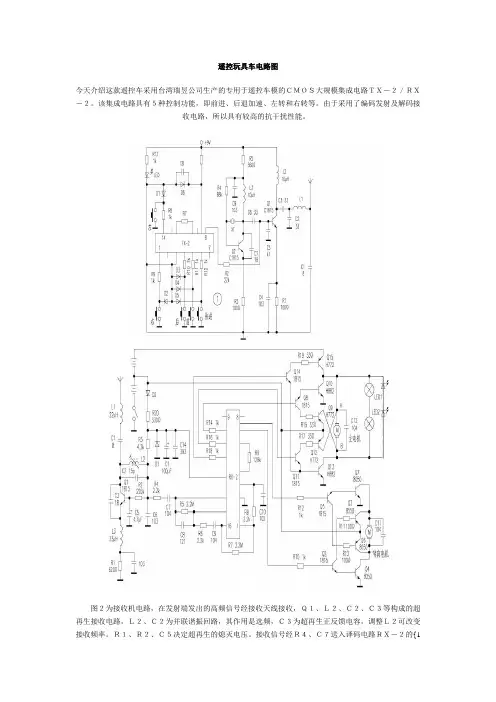
遥控玩具车电路图今天介绍这款遥控车采用台湾瑞昱公司生产的专用于遥控车模的CMOS大规模集成电路TX-2/RX-2。
该集成电路具有5种控制功能,即前进、后退加速、左转和右转等。
由于采用了编码发射及解码接收电路,所以具有较高的抗干扰性能。
图2为接收机电路,在发射端发出的高频信号经接收天线接收,Q1、L2、C2、C3等构成的超再生接收电路,L2、C2为并联谐振回路,其作用是选频,C3为超再生正反馈电容,调整L2可改变接收频率。
R1、R2、C5决定超再生的熄灭电压。
接收信号经R4、C7送入译码电路RX-2的{14}脚进行放大,放大后的信号由{1}脚输出经R8送入译码信号输出端{3}脚进行译码。
当译码电路将收到的信号译码后,若是前进信号,则{11}脚输出高电平,Q11导通→Q12、Q13分别导通,+4。
5V等经Q12→MA→MB→Q13→地,电机正转,车子前进,其他功能依此类推,不再赘述。
R9为振荡电阻。
RX-2中的{6}、{7}、{10}、{11}、{12}脚分别为右转、左转、后退、前进、加速等功能的输出端。
R20、D1、C1、C14组成简单的稳压电路,为RX-2提供稳定的工作电压,D2为隔离二极管。
为使该车更加美观逼真,如图2中所示。
用两只小灯泡,两只LED按图安装,小灯泡作遥控车的前大灯使用,LED为倒车灯。
当车子前进时,大灯亮,LED反偏不亮;倒车时在前大灯亮着的同时,LED为正偏也亮起来作倒车灯使用。
夜晚玩车时,更为有趣。
玩具汽车遥控接收电路:(a)图所示为接收电路,它有ABCDEFG七路输出,分别控制转向(图b);左右转向灯(图c);驱动电机(图d);音乐片发出声音(图e);刹车制动电磁铁和驱动尾部刹车灯LED5LED6发光;前后大灯开关(图g);电源(图h).遥控玩具汽车电路本例介绍的遥控玩具汽车,采用彩色电视机、影碟机等家用电器遥控器来控制其前进与后退,前进时汽车发出警笛声,后退时汽车发出“倒车,请注意!”的语音声,趣味性较强,可用于改制各种电动玩具汽车。
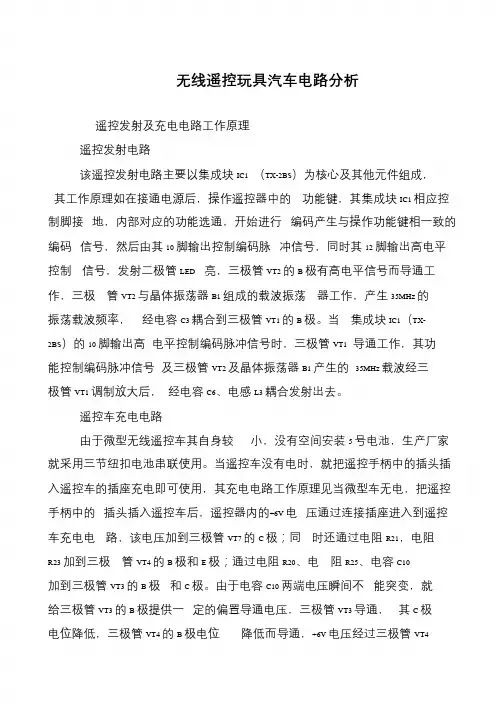
无线遥控玩具汽车电路分析遥控发射及充电电路工作原理遥控发射电路该遥控发射电路主要以集成块IC1 (TX-2BS)为核心及其他元件组成,其工作原理如在接通电源后,操作遥控器中的功能键,其集成块IC1 相应控制脚接地,内部对应的功能选通,开始进行编码产生与操作功能键相一致的编码信号,然后由其10 脚输出控制编码脉冲信号,同时其12 脚输出高电平控制信号,发射二极管LED 亮,三极管VT2 的B 极有高电平信号而导通工作,三极管VT2 与晶体振荡器B1 组成的载波振荡器工作,产生35MHz 的振荡载波频率,经电容C3 耦合到三极管VT1 的B 极。
当集成块IC1(TX- 2BS)的10 脚输出高电平控制编码脉冲信号时,三极管VT1 导通工作,其功能控制编码脉冲信号及三极管VT2 及晶体振荡器B1 产生的35MHz 载波经三极管VT1 调制放大后,经电容C6、电感L3 耦合发射出去。
遥控车充电电路由于微型无线遥控车其自身较小,没有空间安装5 号电池,生产厂家就采用三节纽扣电池串联使用。
当遥控车没有电时,就把遥控手柄中的插头插入遥控车的插座充电即可使用,其充电电路工作原理见当微型车无电,把遥控手柄中的插头插入遥控车后,遥控器内的+6V 电压通过连接插座进入到遥控车充电电路,该电压加到三极管VT7 的C 极;同时还通过电阻R21,电阻R23 加到三极管VT4 的B 极和E 极;通过电阻R20、电阻R25、电容C10 加到三极管VT3 的B 极和C 极。
由于电容C10 两端电压瞬间不能突变,就给三极管VT3 的B 极提供一定的偏置导通电压,三极管VT3 导通,其C 极电位降低,三极管VT4 的B 极电位降低而导通,+6V 电压经过三极管VT4的E、C 极,电阻R18 加到三极管VT7 的 B 极,三极管VT7 导通,开始给遥控车内电池组充电;同时,该电压经电阻R22 给电容CH 充电,充电指示灯LED1 亮。
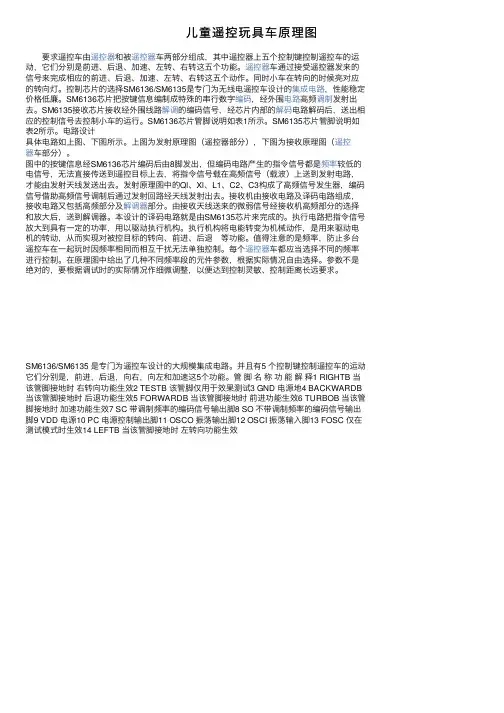
⼉童遥控玩具车原理图 要求遥控车由遥控器和被遥控器车两部分组成,其中遥控器上五个控制键控制遥控车的运动,它们分别是前进、后退、加速、左转、右转这五个功能。
遥控器车通过接受遥控器发来的信号来完成相应的前进、后退、加速、左转、右转这五个动作。
同时⼩车在转向的时候亮对应的转向灯。
控制芯⽚的选择SM6136/SM6135是专门为⽆线电遥控车设计的集成电路,性能稳定价格低廉。
SM6136芯⽚把按键信息编制成特殊的串⾏数字编码,经外围电路⾼频调制发射出去。
SM6135接收芯⽚接收经外围线路解调的编码信号,经芯⽚内部的解码电路解码后,送出相应的控制信号去控制⼩车的运⾏。
SM6136芯⽚管脚说明如表1所⽰。
SM6135芯⽚管脚说明如表2所⽰。
电路设计具体电路如上图、下图所⽰。
上图为发射原理图(遥控器部分),下图为接收原理图(遥控器车部分)。
图中的按键信息经SM6136芯⽚编码后由8脚发出,但编码电路产⽣的指令信号都是频率较低的电信号,⽆法直接传送到遥控⽬标上去,将指令信号载在⾼频信号(载波)上送到发射电路,才能由发射天线发送出去。
发射原理图中的Ql、Xl、L1、C2、C3构成了⾼频信号发⽣器,编码信号借助⾼频信号调制后通过发射回路经天线发射出去。
接收机由接收电路及译码电路组成,接收电路⼜包括⾼频部分及解调器部分。
由接收天线送来的微弱信号经接收机⾼频部分的选择和放⼤后,送到解调器。
本设计的译码电路就是由SM6135芯⽚来完成的。
执⾏电路把指令信号放⼤到具有⼀定的功率,⽤以驱动执⾏机构。
执⾏机构将电能转变为机械动作,是⽤来驱动电机的转动,从⽽实现对被控⽬标的转向、前进、后退等功能。
值得注意的是频率,防⽌多台遥控车在⼀起玩时因频率相同⽽相互⼲扰⽆法单独控制。
每个遥控器车都应当选择不同的频率进⾏控制。
在原理图中给出了⼏种不同频率段的元件参数,根据实际情况⾃由选择。
参数不是绝对的,要根据调试时的实际情况作细微调整,以便达到控制灵敏、控制距离长远要求。
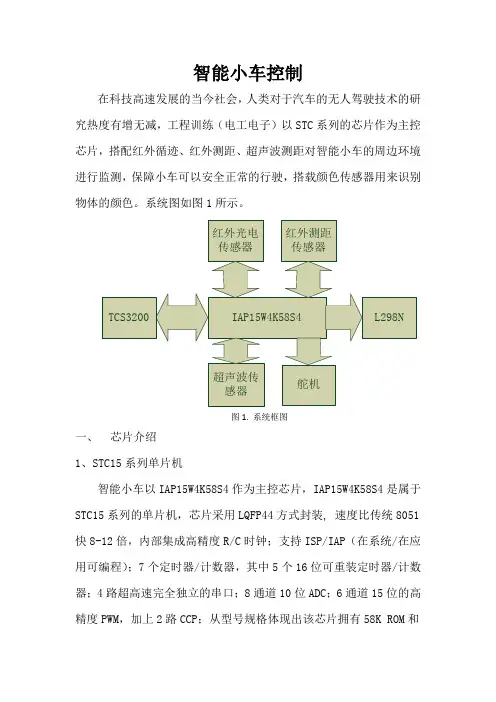
智能小车控制在科技高速发展的当今社会,人类对于汽车的无人驾驶技术的研究热度有增无减,工程训练(电工电子)以STC系列的芯片作为主控芯片,搭配红外循迹、红外测距、超声波测距对智能小车的周边环境进行监测,保障小车可以安全正常的行驶,搭载颜色传感器用来识别物体的颜色。
系统图如图1所示。
图1. 系统框图一、芯片介绍1、STC15系列单片机智能小车以IAP15W4K58S4作为主控芯片,IAP15W4K58S4是属于STC15系列的单片机,芯片采用LQFP44方式封装,速度比传统8051快8-12倍,内部集成高精度R/C时钟;支持ISP/IAP(在系统/在应用可编程);7个定时器/计数器,其中5个16位可重装定时器/计数器;4路超高速完全独立的串口;8通道10位ADC;6通道15位的高精度PWM,加上2路CCP;从型号规格体现出该芯片拥有58K ROM和4K RAM。
实物图如图2所示。
图2. IAP15W4K58S4实物图2、颜色传感器TCS3200颜色传感器TCS3200是TAOS公司推出的可编程彩色光到频率的转换器,采用8引脚表面贴装形式封装(如图3所示),它把可配置的硅光电二极管与电流频率转换器集成在单一的CMOS电路上,同时在芯片上集成四种不同的滤光器:红、绿、蓝(RGB)三种滤光器各16个,不带任何过滤器16个。
为了保证能够尽量减少入射光辐射不平衡,这64个过滤器是交叉排列,从而可以提高颜色识别率。
由于可以驱动标准的TTL或CMOS逻辑输入,所以可直接与MCU或其他逻辑电路相连接,并且可以直接输出数字量,并且能够实现每个彩色信道10位以上的转换精度,因而不再需要A/D转换电路,使电路变得更简单。
图3. TCS3200实物图TCS3200颜色传感器原理图如图4所示,利用三原色理,采集被测物的颜色,即各种颜色都是有三种颜色组成的,通过对芯片的S2、S3引脚编程选择不同的滤波器,它只能让某种特定的原色通过,经过电流到频率转换器后输出不同的方波,不同的颜色和光强对应不同频率的方波。
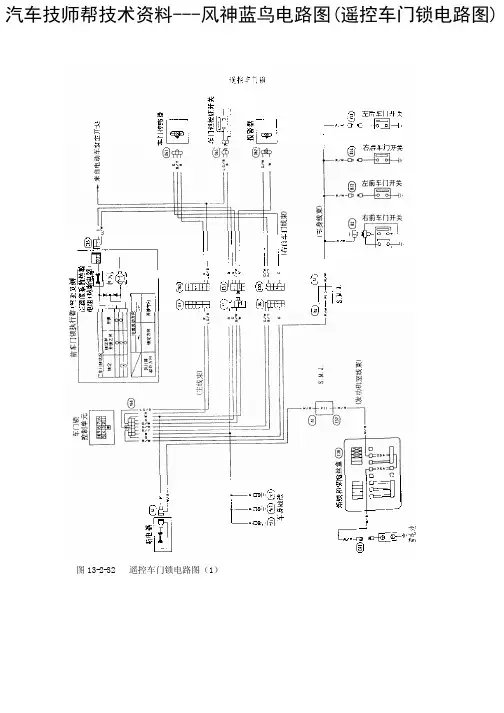
图13-2-32 遥控车门锁电路图(1)图13-2-33 遥控车门锁电路图(2)图13-2-34 座椅拉力放松机构电路图图13-2-35 遮阳篷顶电路图(L.H.D)图13-2-36 遮阳篷顶电路图(R.H.D)图13-2-37 车门镜电路图图13-2-38 供电系统电路图(L.H.D)(1)图13-2-39 供电系统电路图(L.H.D)(2)图13-2-40 供电系统电路图(R.H.D )(1)图13-2-41 供电系统电路图(R.H.D)(2)图13-2-42 起动系统电路图(1)图13-2-43 起动系统电路图(2)图13-2-44 起动系统电路图(3)图13-2-45 充电系统电路图图13-2-46 前大灯电路图图13-2-47 车宽灯、牌照灯、尾灯和制动灯电路图图13-2-48 倒车灯电路图图13-2-49 前雾灯电路图图13-2-50 转向信号灯和危险警告灯电路图图13-2-51 转向灯电路图图13-2-52 照明灯电路图(L.H.D)图13-2-53 照明灯电路图(R.H.D)图13-2-54 车内灯、聚光和行李箱灯电路图图13-2-55 组合仪表电路图(带迎面显示的R.H.D 型)图13-2-56 车速表、转速表、温度表和燃油表电路图(L.H.D型和不带迎面显示的R.H.D型)图13-2-57 车速表、转速表、温度表和燃油表电路图(带迎面显示的R.H.D型)图13-2-58 A T指示灯电路图(R.H.D型)图13-2-59 警告灯电路图图13-2-60 警告灯电路图(L.H.D型)图13-2-61 警告灯电路图(不带迎面显示的R.H.D型)图13-2-62 警告灯电路图(带迎面显示的R.H.D型)。
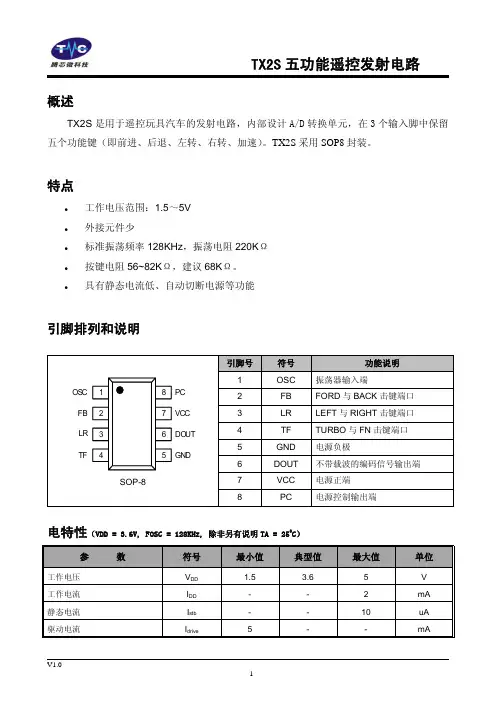
SilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.291REMOTE CONTROLLER WITH FIVEFUNCTIONSDESCRIPTIONThe TX-2B/RX-2B is a pair of CMOS LSIs designed for remotecontrolled car applications.The TX-2B/RX-2B has five control keysfor controlling the motions(i.e.forward,backward,rightward,leftwardand the turbo function)of the remote controlled car.FEATURES*Wide operating voltage range(V CC=1.5~5.0V)*Low stand-by current*Auto-power-off function for TX-2B*Few external components are neededDIP-16DIP-14TX-2BRX-2BORDERING INFORMATIONPart No. PackageTX-2B DIP-14-300-2.54RX-2B DIP-16-300-2.54BLOCK DIAGRAMOSCIOSCORIGHTLEFTTURBOFORWARDBACKWARDPCSOSCDDTRANSMITTER TX-2B Block DiagramSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.292BLOCK DIAGRAMLDBSIRIGHTLEFTTURBOBACKWARDFORWARDVDDRECEIVER RX-2B Block DiagramPIN CONFIGURATIONRIGHTTESTGNDACKWARDFORWARDTURBOSCPCLEFTFOSCOSCIOSCOV DDSORIGHTGNDBACKWARDFORWARDTURBOLEFTOSCIOSCOV DDVO2SIROB LDBVI1VO1VI2SilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.293ABSOLUTE MAXIMUM RATINGSCharacteristic Symbol ValueUnit Supply Voltage V DD0.3~5.0VInput/Output Voltage V IN,V OUT GND-0.3~V DD+0.3VOperating Temperature T OPR-10~65°CStorage Temperature T stg-25~125°CELECTRICAL CHARACTERISTICS1. TX-2B(V DD=4.0V,F osc=128KHz,T amb=25°C,unless otherwise specified.)Characteristic SymbolMinTypMaxUnit Operating Voltage V DD 1.5 4.0 5.0VOperating Current I DD---- 2.0mAStand-By Current I STB----10µADC O/P Driving Current I drive5----mAAC O/P Driving Current I drive5----mAAC O/P Frequency F audio0.5-- 1.0kHz2. RX-2B (V DD=4.0V,F osc=128KHz,T amb=25°C,unless otherwise specified.)characteristic SymbolMinTypMaxUnit Operating Voltage V DD 1.5 4.0 5.0VOperating Current I DD---- 3.0mAO/P Driving Current I drive1----mAO/P Sinking Current I sink1----mAEffect Decoding Frequency Variation F tolerance-20--20%PIN DESCRIPTION1. TX-2BPin No. Symbol Description1RIGHT The rightward function will be selected,if this pin is connected to GND2TEST This pin is used for testing mode3GND Negative power supply4BACKWARD The backward function will be selected,if this pin is connected to GND5FORWARD The forward function will be selected,if this pin is connected to GND(To be continued)SilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.294(Continued)Pin No. Symbol Description6TURBO The turbo function will be selected if this pin is connected to GND7SC Output pin of the encoding signal with carrier frequency8SO Output pin of the encoding signal without carrier frequency9V DD Positive power supply10PC Power control output pin11OSCO Oscillator output pin12OSCI Oscillator input pin13FOSC This pin is used for testing mode14LEFT The leftward function will be selected,if this pin is connected to GND2. RX-2BPin No. Symbol Description1VO2Inverter2output pin for power amplify2GND Negative power supply3SI Input pin of the encoding signal4OSCI Oscillator input pin5OSCO Oscillator output pin6RIGHT Rightward output pin7LEFT Leftward output pin8ROB Rightward function disable,if this pin is connected to GND9LDB Leftward function disable,if this pin is connected to GND10BACKWARD Backward output pin11FORWARD Forward output pin12TURBO TURBO output pin13V DD Positive power supply14VI1Inverter1input pin for power amplify15VO1Inverter1output pin for power amplify16VI2Inverter2input pin for power amplifySilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.295CODE FORMAT1. ENCODE RULE(A).Bit Format(W1is used for function codes,W2for startcodes)1KHzW11KHz50%Duty cycleW2500Hz75%Duty cycle(B).Date FormatW2W2W2W2(n)X W1W2W2W2W2(n)X W1W2W2W2W2W2W2W2W212341234W1W1W1W1W1W1W2W2W2n-thW2Number Of Function Code (N) W1 Function Key Decode Result4End Code10Forward Forward16Forward&Turbo Forward22Turbo Turbo28Turbo&Forward&Left Forward&Left34Turbo&Forward&Right Forward&Right40Backward Backward46Backward&Right Backward&Right52Backward&Left Backward&Left58Left Left64Right RightSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.2962. ENCODE/DECODE TIMINGAny functionEncodeDecode outputTSIDecodeT=17ms+(nW1)x1msTESTING CIRCUIT(The oscillator frequency of TX-2B,RX-2B is128KHz,the oscillator resistor is160KΩand250KΩrespectively)SilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.297TYPICAL APPLICATION CIRCUITTRANSMITTERRECEIVERGNDSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.298INFRARED APPLICATION CIRCUITTRANSMITTERRECEIVERSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.299RECOMMENDED APPLICATION CIRCUITSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.2910。
遥控小汽车电路图CD4017、HS0038
遥控汽车电路图
工作原理:附图是工作原理图。
IC1是红外接收头,平时IC1的{3}脚输出高电平,当接收到来自遥控器的红外信号时,{3}脚输出低电平。
这里不采用代码识别,遥控器可使用彩电、VCD、录放像机、DVD等的遥控器。
遥控汽车电路原理图:
遥控电机正反转电路图:
遥控小汽车音响电路图:IC3、IC4 (9300音频模块)
器件选择与原理:
元件选择见图注。
汽车可选带3V电机的普通玩具车,以买大一点的为佳,这样便于安装。
电池用4节7号充电电池,用胶带捆住,然后固定在车上。
红外接收头固定在车的最高处,以便提高接收灵敏度。
IC3也可选用机枪声、汽车喇叭声等音响电路。
<br />IC2只有Q0端为高电平,这时汽车停止不动。
按一下遥控器,红外接收头便接收到红外遥控信号,其{3}脚输出数码信号经C1平滑为直流低电平,BG1截止,IC2的{14}脚突变为高电平,相当于输入一个正脉冲,Q1端变为高电平,经D1、R4使BG2导通。
IC3是警笛音乐集成电路,其正极和触发极连在一起,BG2导通后,IC3得电工作,信号经BG3放大后使扬声器发出响亮的警笛声。
再按一下遥控器,IC2的Q2端为高电平,经D2使IC3继续工作,扬声器持续发声,又经R6使BG7、BG6和BG8饱和导通,电机正转,汽车前进。
第三次按遥控器,IC2的Q3端输出高电平,经D3、R5使BG5导通,语言电路IC4得电工作。
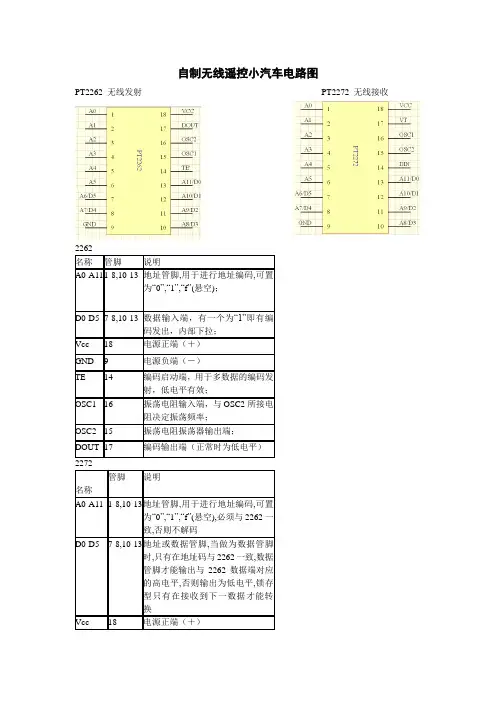
自制无线遥控小汽车电路图
PT2262 无线发射PT2272 无线接收
T10A发射模块
XY-R04A接收模块
无线遥控发射和接受原理图
编码芯片PT2262 发出的编码信号由:地址码、数据码、同步码组成一个完整的码字,解码芯片PT2272 接收到信号后,其地址码经过两次比较核对后,VT 脚才输出高电平,与此同时相应的数据脚也输出高电平,如果发送端一直按住按键,编码芯片也会连续发射。
当发射机没有按键按下时,PT2262 不接通电源,其17 脚为低电平,所以315MHz 的高频发射电路不工作,当有按键按下时,PT2262 得电工作,其第17 脚输出经调制的串行数据信号,当17 脚为高电平期间315MHz 的高频发射电路起振并发射等幅高频信号,当17 脚为低平期间315MHz 的高频发射电路停止振荡,所以高频发射电路完全收控于PT2262 的17 脚输出的数字信号,从而对高频电路完成幅度键控(ASK 调制)相当于调制度为100%的调幅。
PT2262和PT2272除地址编码必须完全一致外,振荡电阻还必须匹配,一般要求译码器振荡频率要高于编码器振荡频率的2.5~8倍,否则接收距离会变近甚至无法接收,随着技术的发展市场上出现一批兼容芯片,在实际使用中只要对振荡电阻稍做改动就能配套使用。
在具体的应用中,外接振荡电阻可根据需要进行适当的调节,阻值越大振荡频率越慢,编码的宽度越大,发码一帧的时间越长。
市场上大部分产品都是用2262/1.2M=2272/200K 组合的,少量产品用2262/4.7M=2272/820K。
解码接收模块包括接收头和解码芯片PT2272两部分组成。
接收头将收到的信号输入PT2272的14脚(DIN),PT2272再将收到的信号解码。
接收板工作电压为DC 5V,接收灵敏度:-103dBm ,尺寸(mm):49*20*7 ,工作频率:315MHz,工作电流:5mA ,编码类型:固定码(板上焊盘跳接设置) 应用说明:与各类型遥控器配合使用,解码输出后进行相应控制,在通常使用中,我们一般采用8位地址码和4位数据码,这时编码芯片PT2262和解码芯片PT2272的第1~8脚为地址设定脚,有三种状态可供选择:悬空、接正电源、接地三种状态,地址编码不重复度为38=6561组,只有发射端PT2262和接收端PT2272的地址编码完全相同,才能配对使用,遥控模块的生产厂家为了便于生产管理,出厂时遥控模块的PT2262和PT2272的八位地址编码端全部悬空,这样用户可以很方便选择各种编码状态,用户如果想改变地址编码,只要将PT2262和PT2272的1~8脚设置相同即可,例如将发射机的PT2262的第2脚接地,第3脚接正电源,其它引脚悬空,那么接收机的PT2272只要也第2脚接地,第3脚接正电源,其它引脚悬空就能实现配对接收。
当两者地址编码完全一致时,接收机对应的D1~D4端输出约4V互锁高电平控制信号,同时VT端也输出解码有效高电平信号。
电机驱动L298N
控制部分,STC8952单片机最小系统图:
将PT2272无线接收头接收来的四位的数据与单片机的IO口一一对应,设计一个按键扫描程序和PWM脉冲调制程序完成对小车的控制,包括转向、变速等。
还要注意一些程序方面的问题,比如按键消颤等。
整个设计思想很简单,易于实现。
8952单片机使用起来也比较简单。
小车车体和直流电机以及电池等自己没法加工,都要买现成品。
我自己在面包板上焊接了所有电路,遥控器就一片PT2262以及控制用的触电按键,小车控制板上有PT2272、L298N、单片机等。
有兴趣的可以自己动手试试,呵呵!。