智能型定位器三段保护原理图
- 格式:pdf
- 大小:58.26 KB
- 文档页数:1
执行器作为控制的终端元件广泛地用于过程自动化控制中。
气动执行器由于其具有本质安全防爆、结构简单可靠、维修方便等突出的优点,更是一直为执行器的主流产品,是一类广泛用于电力、冶金、石化、化工、造纸、建材和食品饮料等行业的工业自动化仪表产品。
为了提高气动执行器的性能,阀门定位器是不可或缺的配套产品。
近年来,智能阀门定位器由于其卓越的性能和强大的功能已越来越受广大用户的青睐,其中,西门子的智能阀门定位器SIPART PS2更由于其性能优越、可靠性极高而在智能阀门定位器市场上处于领先地位。
气动执行器及智能阀门定位器正常地工作,要求过程控制系统能够持续地提供正确的气源、电源和信号源。
但在实际应用中,过程控制系统显然无法提供百分之百的保证。
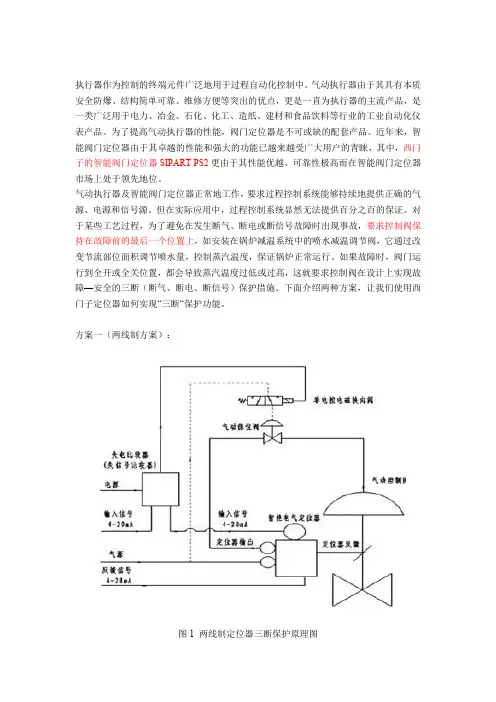
对于某些工艺过程,为了避免在发生断气、断电或断信号故障时出现事故,要求控制阀保持在故障前的最后一个位置上,如安装在锅炉减温系统中的喷水减温调节阀,它通过改变节流部位面积调节喷水量,控制蒸汽温度,保证锅炉正常运行。
如果故障时,阀门运行到全开或全关位置,都会导致蒸汽温度过低或过高,这就要求控制阀在设计上实现故障—安全的三断(断气、断电、断信号)保护措施。
下面介绍两种方案,让我们使用西门子定位器如何实现“三断“保护功能。
方案一(两线制方案):图1 两线制定位器三断保护原理图本方案主要由气动控制阀、两线制西门子阀门定位器(6DR50xx-,6DR51xx-)、电子开关(失信号比较器)、单电控电磁换向阀、气动保位阀组成,见图1。
其工作原理如下:1、断气源:单作用定位器可选用单通道气动保位阀,双作用定位器可选用双通道气动保位阀。
当气源系统发生故障(失气)时,气动保位阀自动切断定位器与气动控制阀之间的通道,将定位器的输出信号压力锁定在气动控制阀的膜室内,输出信号压力与控制阀弹簧产生的反力相平衡或两气室的压力平衡,气动控制阀的阀位保持在故障前的最后一个控制信号位置上。
该保位阀应设定在略低于气源的最小值时启动,因西门子定位器正常工作的压力范围是0.14~0.7MPa,切换点可设为0.14MPa。
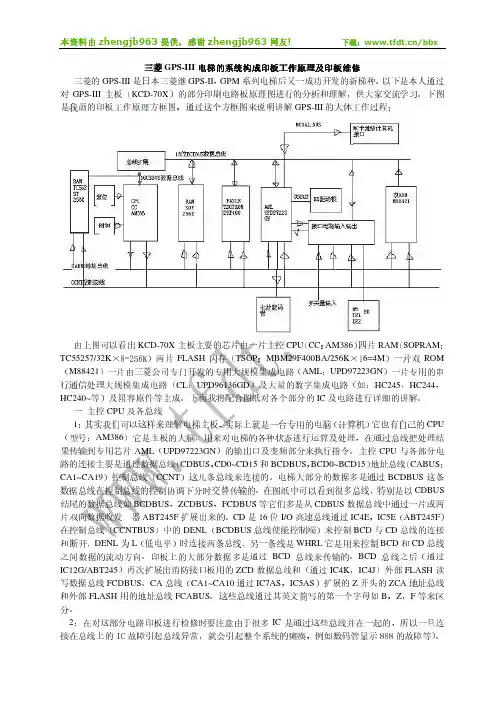
三菱GPS-III电梯的系统构成印板工作原理及印板维修三菱的GPS-III是日本三菱继GPS-II,GPM系列电梯后又一成功开发的新梯种。
以下是本人通过对GPS-III主板(KCD-70X)的部分印刷电路板原理图进行的分析和理解,供大家交流学习。
下图是我画的印板工作原理方框图,通过这个方框图来说明讲解GPS-III的大体工作过程:由上图可以看出KCD-70X主板主要的芯片由一片主控CPU(CC:AM386)四片RAM(SOPRAM:TC55257/32K×8=256K)两片FLASH闪存(TSOP:MBM29F400BA/256K×16=4M)一片双ROM (M88421)一片由三菱公司专门开发的专用大规模集成电路(AML:UPD97223GN)一片专用的串行通信处理大规模集成电路(CL:UPD96136GD)及大量的数字集成电路(如:HC245,HC244,HC240~等)及阻容原件等主成。
下面我将配合图纸对各个部分的IC及电路进行详细的讲解。
一主控CPU及各总线1:其实我们可以这样来理解电梯主板,实际上就是一台专用的电脑(计算机)它也有自己的CPU (型号:AM386)它是主板的大脑,用来对电梯的各种状态进行运算及处理,在通过总线把处理结果传输到专用芯片AML(UPD97223GN)的输出口及变频部分来执行指令。
主控CPU与各部分电路的连接主要是通过数据总线(CDBUS,CD0~CD15和BCDBUS,BCD0~BCD15)地址总线(CABUS:CA1~CA19)控制总线(CCNT)这几条总线来连接的。
电梯大部分的数据多是通过BCDBUS这条数据总线在控制总线的控制协调下分时交替传输的。
在图纸中可以看到很多总线,特别是以CDBUS 结尾的数据总线如BCDBUS,ZCDBUS,FCDBUS等它们多是从CDBUS数据总线中通过一片或两片双向数据收发器ABT245F扩展出来的。
无时限电流速断保护(电流I段)反应电流增大而能瞬时动作切除故障的电流保护,称为电流速断保护也称为无时限电流速断保护。
1.几个基本概念(1)系统最大运行方式与系统最小运行方式最大运行方式:就是在被保护线路末端发生短路时,系统等值阻抗最小,而通过保护装置的短路电流为最大的运行方式。
最小运行方式:就是在同样短路条件下,系统等值阻抗最大,而通过保护装置的短路电流为最小的运行方式。
(2)最小短路电流与最大短路电流在最大运行方式下三相短路时,通过保护装置的短路电流为最大,称之为最大短路电流。
在最小运行方式下两相短路时,通过保护装置的短路电流为最小,称之为最小短路电流。
(3)保护装置的起动值对应电流升高而动作的电流保护来讲,使保护装置起动的最小电流值称为保护装置的起动电流。
(4)保护装置的整定所谓整定就是根据对继电保护的基本要求,确定保护装置起动值,灵敏系数,动作时限等过程。
2、整定计算(1)动作电流为保证选择性,保护装置的起动电流应按躲开下一条线路出口处短路时,通过保护的最大短路电流来整定。
即Idz>Id.max=KK Id.Bmax 式中可靠系数KK =1.2~1.3,结论:电流速断保护只能保护本条线路的一部分,而不能保护全线路,其最大和最小保护范围Lmax和Lmin。
(2) 保护范围(灵敏度KLm)计算(校验)《规程》规定,在最小运行方式下,速断保护范围的相对值 Lb%>(15%~20%)时,为合乎要求,即(3)动作时限无时限电流速断保护没有人为延时,在速断保护装置中加装一个保护出口中间继电器。
一方面扩大接点的容量和数量,另一方面躲过管型避雷器的放电时间,防止误动作。
t=0s3、对电流速断保护的评价优点:是简单可靠,动作迅速。
缺点:(1)不能保护线路全长;(2)运行方式变化较大时,可能无保护范围。
注意: (1) 在最大运行方式下整定后,在最小运行方式下无保护范围。
二、限时电流速断保护(电流II段)的电流速断保护限时电流速断保护:按与相邻线路电流速断保护相配合且以较短时限获得选择性的电流保护。
卫星定位芯片相对比较可靠,但要预防卫星定位高压电源的烧毁。
如操作不当(浸水、短路、不当充电、剧烈震动)极可能造成定位模块供电电源的烧毁,烧毁后外表无变化、不影响手机其他任何功能,且需要专业检测设备检测才能发现。
故在使用前应作相应培训,应严防误操作发生!!基于JP7-T的GPS接收机和定位系统设计0引言作为导航领域内一种全新的技术,GPS全球定位系统主要利用卫星进行定位。
GPS最初由美国政府机构控制使用,是目前世界上最为成熟和完好的全球卫星导航系统。
它由30颗(4颗为备份星)在轨卫星组成。
早期的GPS系统对民用信号的定位精度限制为100米左右,2000年后则取消这一限制。
目前,GPS可以提供的民用信号定位精度为10米左右。
GPS 现可应用于多领域(如民用航空,车辆调度管理,深海海运等整个海陆空范围内的导航等),特别是在目前的车载导航领域,GPS全球卫星定位技术更是具有广泛的应用。
随着应用领域的日益扩大,中国卫星导航仪的市场规模已从2000年的不到10亿元增长到了2005年的120亿元。
因此,对GPS进行研究和二次开发势在必行。
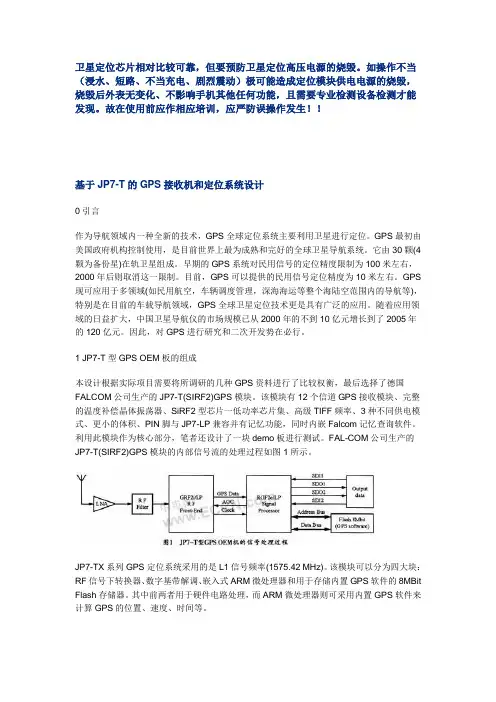
1 JP7-T型GPS OEM板的组成本设计根据实际项目需要将所调研的几种GPS资料进行了比较权衡,最后选择了德国FALCOM公司生产的JP7-T(SIRF2)GPS模块。
该模块有12个信道GPS接收模块、完整的温度补偿晶体振荡器、SiRF2型芯片一低功率芯片集、高级TIFF频率、3种不同供电模式、更小的体积、PIN脚与JP7-LP兼容并有记忆功能,同时内嵌Falcom记忆查询软件。
利用此模块作为核心部分,笔者还设计了一块demo板进行测试。
FAL-COM公司生产的JP7-T(SIRF2)GPS模块的内部信号流的处理过程如图1所示。
JP7-TX系列GPS定位系统采用的是L1信号频率(1575.42 MHz)。
该模块可以分为四大块:RF信号下转换器、数字基带解调、嵌入式ARM微处理器和用于存储内置GPS软件的8MBit Flash存储器。


第四节智能阀门定位器随着工业技术和计算机技术的发展,阀门定位器从最初的气动挡板力平衡式、线圈力平衡式、电气集成力平衡式阀门定位器,发展到加入微控制器的智能型电气阀门定位器,并向全数字化和使用现场总线技术方向发展。
在实际工业控制工程中,生产对流量控制方面的要求越来越高,不但要求控制精度高、响应速度快,同时要求控制方式上多样化,这就对阀门定位器的性能提出了更高要求。
目前,智能型电气阀门定位器已经越来越广泛地应用在各种工业控制领域并发挥着重要的作用。
例如,如美国Fisher - Rosemount 公司生产的基于现场总线式DVC 系列阀门定位器系统,德国Siemens 公司生产的SIPART PS2系列阀门定位器等,依靠各自的特色和稳定可靠的性能,已经被广泛应用于各大炼化企业中,成为生产过程控制中的重要组成部分。
在本书将以山武公司YAMATAKE SVP3000、ABB公司的TZID-C 、Siemens公司SIPART PS2系列及Fisher - Rosemount 公司的DVC6000系列智能阀门定位器为例,介绍一下智能阀门定位器的调校及故障处理。
首先我们要了解一下智能阀门定位器的结构及原理。
每种定位器在设计上都有它自己的独到之处,但在其基本原理上还是大致相同,只是在放大器的结构上采用了不同处理方法,有普通式、三位式和压电阀式等几种。
而且有很多厂商在双输出调节时采用外接辅助放大器来实现的。
其基本原理如下:外部条件应具备4—20mA的信号源与可以驱动调节的气源,接通气源将减压阀压力调整为调节阀额定压力并给定>4mA的控制信号驱动定位器的电路模块及微处理器。
假设给定信号值为8mA,电信号通过A/D转换模块将模拟信号装换为数字信号给微处理器将驱动EPM(电气转换)驱动模块控制EPM模块再将气信号给气动放大器那么定位器产生气输出,调节阀动作同时带动定位器的反馈杆动作通过VTD(位置传感器)将位移转换成4—20mA的电信号给A/D转换器由微处理器进行比较处理,当给定值=控制量的时候调节阀也就稳定下来。

西门子智能定位器调试说明:SIPART PS2电气定位器用来控制气动直行程或角行程执行机构如下图:角行程ﻫ直行程一、智能定位器功能图:说明:1、①机侧凝结水补充水箱出口调门为单作用定位器,反馈:61-ZI+;62—ZI-;②当失信号时阀门全开③操作时按“+”健阀门向关方向走,按“—"健阀门向全开方向走(与说明书上相反)、(单作用铭牌)2、炉侧磨煤机入口冷热风调门为双作用定位器,(双作用铭牌)3.炉侧磨煤机入口冷热风调门为双作用定位器接线原理图:二、校验与调整1、参数设置:(定位器上有三个按键:小手形、“+”健、“—健”)自动模式(MAN手动)阀门实际开度指令开度1.1按住功能键(小手形)5秒后就可以进行参数设置1.2西门子智能定位器共有55组参数,+"与“—”健可在一组参数中进行选择,选择完了可以按一下功能键进入第二组参数得设置,若上一个参数有误,可以按功能键得同时按住“-”健,回到上一个参数进行设置。
1。
3 组态:以下几个参数就是经常用到得,具体请参考说明书上得组态表、YFCT(参数组号①)执行器类型:直行程选WAY,角行程选TURN(本厂机侧得凝结水补充水箱出口调门与炉侧得磨煤机入口冷热风调门都为直行程)YAGL②额定反馈角度:一般情况下直行程33度,角行程90度,(本厂本厂机侧得凝结水补充水箱出口调门与炉侧得磨煤机入口冷热风调门都为直行程,但选得就是90度,具体应该瞧反馈杆得长度,短杠杆33度得长度为:5/10/15/20mm,短杠杆90度得长度为:25/30/35mm,长杠杆90度得长度为:40/50/60/70/90/110/130mm)INITA④初始化(自动)SDIR⑦给定方向:上升RISE,下降FAILYDIR(38)操作变量显示:上升RISE,下降FAIL。
同时改变SDIR与YDIR这两组得参数可以改变执行器得动作方向。
2、西门子智能定位器初始化步骤:2、1接通4-20mA输入信号,现在定位器处于手动模式“MAN",在定位器显示窗口上方显示得为电位计得电压百分数,例如:“P12。

西门子智能定位器调试说明:SIPART PS2电气定位器用来控制气动直行程或角行程执行机构如下图:角行程直行程一、智能定位器功能图:说明:1、①机侧凝结水补充水箱出口调门为单作用定位器,反馈:61-ZI+;62-ZI-;②当失信号时阀门全开③操作时按“+”健阀门向关方向走,按“-”健阀门向全开方向走(与说明书上相反)。
(单作用铭牌)2、炉侧磨煤机入口冷热风调门为双作用定位器,(双作用铭牌)3.炉侧磨煤机入口冷热风调门为双作用定位器接线原理图:二、校验与调整1、参数设置:(定位器上有三个按键:小手形、“+”健、“-健”)自动模式(MAN手动)阀门实际开度指令开度1.1 按住功能键(小手形)5秒后就可以进行参数设置1.2 西门子智能定位器共有55组参数,可以根据现场实际情况进行设置。
用“+”和“-”健可在一组参数中进行选择,选择完了可以按一下功能键进入第二组参数的设置,若上一个参数有误,可以按功能键的同时按住“-”健,回到上一个参数进行设置。
1.3 组态:以下几个参数是经常用到的,具体请参考说明书上的组态表。
YFCT(参数组号①)执行器类型:直行程选WAY,角行程选TURN(本厂机侧的凝结水补充水箱出口调门和炉侧的磨煤机入口冷热风调门都为直行程)YAGL②额定反馈角度:一般情况下直行程33度,角行程90度,(本厂本厂机侧的凝结水补充水箱出口调门和炉侧的磨煤机入口冷热风调门都为直行程,但选的是90度,具体应该看反馈杆的长度,短杠杆33度的长度为:5/10/15/20mm,短杠杆90度的长度为:25/30/35mm,长杠杆90度的长度为:40/50/60/70/90/110/130mm)INITA④初始化(自动)SDIR⑦给定方向:上升RISE,下降FAILYDIR(38)操作变量显示:上升RISE,下降FAIL.同时改变SDIR和YDIR这两组的参数可以改变执行器的动作方向。
2、西门子智能定位器初始化步骤:2.1 接通4-20mA输入信号,现在定位器处于手动模式“MAN”,在定位器显示窗口上方显示的为电位计的电压百分数,例如:“P12.3”,窗口的下方闪烁显示“HDINIT”即“未初始化”;2.2 用定位器显示窗口下方的“+”和“-”两个按键使执行机构运动,看整个机构是否走满全程;2.3 让执行器运动到行程的中间位置(直行程的反馈杆处于水平位置)就可以进行初始化了。
三段式距离呵护之樊仲川亿创作1、距离呵护Ⅰ段的呵护范围为线路全长的80~85%,即线路AB段的80~85%。
动作阻抗为ZⅠO P1=(0.80~0.85)Z AB,瞬时动作。
动作过程:当故障点位于距离呵护Ⅰ段范围内时,丈量阻抗Z M小于动作阻抗ZⅠO P1,呵护1动作跳闸,切除故障。
2、距离呵护Ⅱ段的呵护范围为AB段的全长,并延伸至BC段但不超出呵护2的距离呵护Ⅰ段呵护的范围(呵护2距离Ⅰ段的呵护范围为呵护2本线路的80~85%,因此呵护1距离呵护Ⅱ段的呵护范围小于AB+80~85%BC),因此呵护1距离Ⅱ段的动作阻抗Z ⅡO P1小于(Z AB+ZⅠO P2),动作时间大于距离呵护Ⅰ段。
距离呵护Ⅱ段是为了呵护距离呵护Ⅰ段呵护范围之外的15%~20%的线路及作为距离呵护Ⅰ段的后备呵护。
动作过程:(1)当故障点位于AB段距离呵护Ⅰ段范围之外时(即距离呵护Ⅰ段呵护范围之外的15%~20%AB),丈量阻抗Z M大于呵护1的距离Ⅰ段动作阻抗,呵护1的距离呵护Ⅰ段不动作。
呵护2的距离Ⅰ段呵护范围为本线路的80~85%,故障点也不在呵护2的呵护范围内,因此呵护2也不动作。
由上距离呵护Ⅱ段的呵护范围可知,故障点位于该呵护范围内。
因此,当该点发生故障时,呵护1的距离呵护Ⅰ段不动作,经过呵护1的距离呵护Ⅱ段动作整定时间,呵护动作切除故障。
(2)当故障点位于呵护2本线路80~85%范围内时,呵护2丈量阻抗Z M小于呵护2距离呵护Ⅰ段动作阻抗ZⅠO P2,呵护2动作跳闸,切除故障。
虽然故障点也可能位于呵护1距离呵护Ⅱ段的范围内,但是其动作时间大于呵护2距离呵护Ⅰ段的动作时间,距离呵护Ⅰ段是瞬时动作的。
因此呵护2距离呵护Ⅰ段先动作,呵护1距离呵护Ⅱ段不动作。
3、距离呵护Ⅲ段作为下一线路的呵护和本线路主呵护的后备呵护,动作阻抗应小于线路最小负荷阻抗,动作时间大于本线路及相邻线路呵护动作的最大时间。
即当距离呵护Ⅰ、Ⅱ段在故障时均不动作,距离呵护Ⅲ段作为后备呵护动作跳闸,切除故障。