长时延丢包网络控制系统的分析与建模
- 格式:pdf
- 大小:264.99 KB
- 文档页数:6


5G技术中的网络时延控制与丢包率优化随着移动通信技术的迅猛发展,5G的到来将带来前所未有的高速、低延迟和大容量的通信体验。
在5G网络中,网络时延和丢包率的控制与优化是至关重要的因素。
本文将讨论5G技术中网络时延控制和丢包率优化的相关问题,以及提出相应的解决方案。
网络时延的控制对于5G应用来说是至关重要的。
网络时延是指数据从发送端经过网络传输到接收端所需的时间。
5G技术要求实时性高,因此网络时延必须尽量降低。
网络时延主要包括传输时延、处理时延和排队时延。
传输时延是指数据从发送端到接收端所需的时间,受到物理传输方式的限制;处理时延和排队时延是指数据在节点中处理和排队所需的时间,受到网络拓扑结构的影响。
为了降低网络时延,可以采取以下措施:设计更高效的协议和算法。
5G技术中的协议和算法需要针对高速、低延迟的特点进行优化。
例如,使用更高效的压缩算法来减小传输时延,采用更快速的路由算法来减小处理时延等。
提高网络的带宽和容量。
5G网络需要具备更大的带宽和容量,以支持高速、大流量的数据传输。
通过增加网络资源和优化网络拓扑结构,可以提高网络的带宽和容量,从而减小排队时延。
丢包率的优化也是5G网络中的一个重要问题。
丢包率是指数据在传输过程中丢失的比例,丢包率高会导致数据传输的不稳定性和可靠性下降。
对于5G应用来说,稳定的数据传输是至关重要的。
要降低丢包率,可以采取以下措施:优化无线信道的质量。
无线信道的质量对丢包率有着直接的影响。
通过增加天线数量、改善天线布局和使用更优化的调制解调器等方法,可以提高无线信道的质量,减小丢包率。
采用前向纠错编码技术。
前向纠错编码技术可以在发送端将冗余信息添加到数据中,在接收端通过纠错算法恢复原始数据。
通过使用前向纠错编码技术,可以提高数据的可靠性和容错性,减小丢包率。
优化网络拥塞控制算法。
网络拥塞是导致丢包率增加的主要原因之一。
通过采用更智能的拥塞控制算法,可以及时调整发送速率,避免网络拥塞,减小丢包率。


网络丢包现象的剖析与应对摘要网络丢包是一种非常常见的现象,也是一种非常复杂和难以被发现的问题。
如果网络出现丢包,就会影响数据传输,计算机网络也就得不到正常应用,从而会极大的影响工作质量和效率。
本文对网络丢包的各种表现进行了深入分析,总结引起网络丢包的不同起因,通过对网络丢包的实时检测,提供详细的排除过程,从而有效的解决网络丢包问题。
关键词网络丢包;实时检测;解决办法1网络丢包的各种表现1.1无法自动获得IP地址具体表现如下:1)网络连接提示受限制或无连接,并且在系统托盘区中的连接图标上有感叹号。
2)一自动获取就自动分配了一个169.254.223.251之类的地址。
3)拨号软件无法连接服务器,提示网络连接错误。
4)无法访问Internet。
1.2网络速度不稳定具体表现如下:1)网络速度时快时慢,有时候慢得打不开网站。
2)网络连接过程中,检验用户名与密码停顿久。
3)玩网络游戏刚开始正常,玩一会就开始卡,卡一会又不卡,周而复始。
4)下载东西前几分钟快,几分钟后开始变慢,再过几分钟又变快,周而复始。
1.3网络时延大具体表现如下:1)上网无法浏览网页却能用QQ聊天。
2)开始网速正常,但过了一段时间后,网速变慢。
3)IE浏览器突然出现“找不到服务器”的提示。
4)QQ总是出现“与服务器连接中断”的提示,然后不断地进行反复登陆。
2网络丢包的不同起因2.1网络设备问题1)网卡故障。
①绑定的协议过多—网卡上如果绑定了许多协议,当数据通过网卡时,计算机就要花费很多时间来确定该数据使用哪种协议来传送,从而造成网速缓慢,引起丢包;②驱动程序安装错误—当网卡驱动程序安装错误时,会对数据传输造成影响,从而引起网络丢包;③设备老化—当集成网卡“服役”时间比较长后,很容易发生设备老化现象,而老化了的网卡设备在处理大量数据时几乎就不能正常工作,从而引起丢包。
2)ADSL故障。
ADSL设备工作时发热量比较大,许多用户把ADSL设备和路由器、集线器等放在一个机柜里,不利于散热,对ADSL的正常工作有影响,从而引起网络丢包。
第22卷第1期Vol.22No.1控 制 与 决 策Cont rolandDecision2007年1月 J an.2007收稿日期:2005211208;修回日期:2006205209.基金项目:国家科技攻关计划项目(2001BA204B01);教育部骨干教师基金项目(69825106).作者简介:马卫国(1976—),男,山东栖霞人,博士生,从事网络控制系统的研究;邵诚(1958—),男,江苏靖江人,教授,博士生导师,从事复杂系统的建模与控制、自适应控制、鲁棒控制等研究. 文章编号:100120920(2007)0120021204具有长时延及丢包的网络控制系统稳定性分析马卫国,邵 诚(大连理工大学信息与控制研究中心,辽宁大连116024)摘 要:研究了同时具有大于一个采样周期的随机传输时延及数据包丢失的网络控制系统的稳定性问题.对于给定的数据包丢失率,网络控制系统被建模为具有两个事件速率约束的异步动态系统,利用异步动态系统理论给出了网络控制系统指数稳定的充分条件,状态反馈控制器可通过解一组矩阵不等式求出.仿真示例验证了所提出方法的有效性.关键词:网络控制系统;长时延;数据包丢失;稳定性;异步动态系统中图分类号:TP273 文献标识码:AStability analysis for net w orked controlsystems with longtransmission delay and data packet dropoutM A W ei 2g uo ,S H A O Cheng(Research Center of Information and Control ,Dalian University of Technology ,Dalian 116024,China.Correspondent :MA Wei 2guo ,E 2mail :ma_weiguo @ )Abstract :The stability of networked control systems ,with stochastic transmission delay larger than one sampling period and the dropped out packets ,is studied.For the given data packet dropout ,the networked control systems is modeled as an asynchronous dynamical system with rate constraints on two events.The sufficient condition of exponential stability for the networked control systems is presented based on the theory of asynchronous dynamical system.Meanwhile the state feedback controller can be solved by a set of matrix inequalities.A numerical example shows the effectiveness of the proposed method.K ey w ords :Networked control systems ;Long transmission delay ;Data packet dropout ;Stability ;Asynchronous dynamical system1 引 言 网络控制系统是指通过通讯网络形成闭环的反馈控制系统[1].在网络控制系统中,传感器、控制器和执行器等系统组件作为网络节点直接挂接在网络上,通过共享的有线或无线通讯网络进行传感和控制信息的交换,因此网络控制系统与传统的直接点对点连接的控制系统相比,具有连线少、成本低、安装维护方便和灵活性高等优点,被广泛应用于汽车制造、机器人和飞行器控制系统等多个领域[2,3].虽然网络控制系统具有很多优点,但在反馈回路中引入通讯网络后将产生一些新的问题:由于网络节点共享同一个通讯网络,数据通过网络传输时将会产生恒定或随机的通讯时延,而时延会使控制系统的性能恶化,甚至有可能使系统变得不稳定.网络控制系统中存在的另一个问题是数据丢包问题.因为通讯网络是一种非可靠的传输通道,当受到外界干扰或发生网络拥塞时,网络上的数据在传输时不但存在传输延迟,而且可能会出现数据包丢失的现象.这些问题使网络控制系统的分析和设计变得很复杂.对于网络控制系统中传输时延小于一个采样周期的情况,文献[4]利用时间戳的方法研究了系统的随机最优控制问题;文献[5]分析了传输时延大于一个采样周期的网络控制系统的稳定性,设计了最优状态反馈控制器和输出反馈控制器;文献[6]将时变网络时延看作某一恒定时延与不确定时延之和,建 控 制 与 决 策第22卷立了具有结构不确定性的长时延网络控制系统模型,给出了基于矩阵不等式的控制器设计方法.然而,上述文献仅研究了网络传输延迟问题,没有考虑数据在传输过程中的丢包问题.对于网络控制系统中存在的数据丢包问题,文献[7]利用异步动态系统的方法研究了网络控制系统稳定性,给出了系统指数稳定的充分条件,但没有考虑数据的网络传输延迟的问题;文献[8]分析了同时具有传输延迟和数据包丢失的网络控制系统稳定性,但文中仅对小于一个采样周期的恒定延迟进行了讨论,没有考虑传输延迟大于一个采样周期的情况.本文将同时具有大于一个采样周期的随机传输延迟和数据包丢失的网络控制系统建模为具有两个事件速率约束的异步动态系统,利用异步动态系统理论分析了网络控制系统的稳定性,给出了基于矩阵不等式的状态反馈控制器设计方法.2 具有长时延及数据包丢失的网络控制系统模型 本文研究的网络控制系统如图1所示.系统中控制器和执行器位于同一节点上,网络只存在于传感器与控制器之间.图1 具有长时延和数据包丢失的网络控制系统假设网络控制系统中被控对象的状态方程为x (t )=A x (t )+B u (t ),y (t )=Cx (t ).(1)其中:x (t )∈R n ,u (t )∈R m ,y (t )∈R p 分别为被控对象的状态、控制输入和被控对象的输出;A ,B ,C 为具有相应维数的定常矩阵.设传感器节点采用时间驱动方式,对被控对象进行等周期采样,采样周期为T ,传感器将采集到的被控对象数据打成一个数据包,通过串行通讯网络传输到控制器端的接收缓冲区.控制器接收到经过网络传输的数据后立刻计算控制量.设数据在网络上的传输时延大于一个采样周期且是随机的,则时延可描述为τk =(d -1)T +τmid+τ′≤ d T.其中:d ≤ d =[τwc/T ],[Δ]表示大于Δ的最小整数,τwc 为已知的最坏情况下的时延,τmid=T/2,-T/2≤τ′≤T/2.通常数据通过网络传输可分为两种情况:一是数据在传输过程中没有出现差错,成功地从源节点到达目的节点,将这种数据传输成功的情况记为事件S 1,设其发生率为r;另一种情况是数据在传输过程中由于受到外界干扰而出现差错或者丢失,此时发送节点将根据所采用的通讯协议采取不同的措施.例如,如果网络节点采用的是基于连接的TCP 协议,则发送节点将重新传输丢失的数据包;如果网络节点采用的是UDP 协议,由于UDP 协议是基于无连接的,如果数据包丢失,发送节点不会重传丢失的数据包.将数据传输失败的情况记为事件S 2,其发生率为1-r.这样就可以将网络看作一个以速率r 闭合的开关.当S 1发生时,被控对象的离散时间模型为[6]x (k +1)=Φx (k )+Γ0(τk )u (k -d +1)+Γ1(τk )u (k -d ).(2)其中Φ=e A T ,Γ0(τk )=∫T-T/2-τ′e As d sB =∫T/2e As d sB +eA (T/2)∫-τ′e As d sB ,Γ1(τk )=∫TT-T/2-τ′e As d sB =∫TT/2e As d sB +eA (T/2)∫-τ′0e As d s (-B ).令Γ0=∫T/2e Asd sB ,Γ1=∫TT/2e As d sB ,D =eA (T/2),F =∫-τ′e As d s ,E 0=B ,E 1=-B ,増广向量z (k )=[x (k )Tu (k -d )T…u (k -1)T ]T ,则式(2)化为z (k +1)= Φ1z (k )+ Γ1u (k ).(3)其中 Φ1=ΦΓ1+D F E1Γ0+D F E 0 (00)I…0…………000…I 000…0, Γ1=[0 0 … 0 I ]T . 当S 2发生时,由于网络传输数据失败,执行器将保持上一周期的值,即u (k )=u (k -1).此时被控对象的离散时间模型为[6]z (k +1)= Φ2z (k )+ Γ2u (k ).(4)22第1期马卫国等:具有长时延及丢包的网络控制系统稳定性分析 其中Φ2=ΦΓ1+D F E1Γ0+D F E0…00I 0…………000 (I)000 (I),Γ2=[0 0 … 0 0]T 如果网络控制系统中的控制器采用状态反馈控制律u(k)=Kz(k),则闭环网络控制系统的状态方程为z(k+1)= Φs z(k),s=1,2.(5)其中Φ1=^Φ1+^D F^E+ Γ1K,Φ2=^Φ2+^D F^E+ Γ2K,^Φ1=ΦΓ1Γ0...0 00I...0............000 (I)000 0,^Φ2=ΦΓ1Γ0...0 00I...0............000 (I)000 (I),^D=[D T 0 … 0 0]T,^E=[0 E1 E0 … 0 0].这样,网络控制系统便转化成为一个具有两个事件速率约束的异步动态系统,可利用已有的异步动态系统理论对其进行分析研究.3 稳定性分析 引理1[9] 设具有相应维数的矩阵W,D和E,其中W为对称阵,对于所有满足F T F≤I的矩阵F,W+D F E+E T F T D T<0成立的充要条件是存在ε>0,使得W+εD D T+ε-1E T E<0.引理2[10](Schur补引理) 对于给定的对称矩阵L=L11L12L T12L22,下述条件是等价的:1)L<0;2)L11<0,L22-L T12L-111L12<0;3)L22<0,L11-L12L-122L T12<0.引理3[11] 设异步动态系统x(k+1)= f s(x(k)),其中s=1,2,…,N,离散事件的发生率分别为r1,r2,…,r N,0≤r s≤1,且∑Ns=1r s=1.如果存在L yap unov函数V(x(k)):R n→R+以及对应于事件发生率的正标量α1,α2,…,αN,满足下列不等式:αr11αr22…αr N N>α>1,(6)V(x(k+1))≤α-2s V(x(k)),s=1,2,…,N,(7)则异步动态系统是指数稳定的,其衰减率为α.具有传输延迟和数据包丢失的网络控制系统可建模为一个异步动态系统,所以根据上述引理,可得到如下结论:定理1 对于由式(5)描述的闭环网络控制系统,假设数据通过网络传输的成功率为r.如果存在对称正定矩阵X,矩阵Y以及正的标量α1,α2,α和ε,使得下列不等式成立:αr1α1-r2>α>1,(8) -α-21X(^Φ1X+ Γ1Y)T(^E X)T^Φ1X+ Γ1Y-X+ε^D^D T0^E X0-εΙ<0,(9)-α-22X(^Φ2X)T(^E X)T^Φ2X-X+ε^D^D T0^E X0-εΙ<0,(10)则网络控制系统是指数稳定的,其衰减率为α,其中状态反馈控制器增益矩阵K=Y X-1.证明 因为数据通过网络传输的成功率为r,所以事件S1和S2的发生率为r和1-r.代入式(6)可得式(8).选取Lyap unov函数V(z(k))=z T(k)Pz(k),其中P为对称正定矩阵.事件S1发生时,有V(z(k+1))-α-21V(z(k))=z T(k+1)Pz(k+1)-α-21z T(k)Pz(k)=z T(k)[( Φ1+ Γ1K)T P( Φ1+Γ1K)-α-21P]z(k),所以V(z(k+1))≤α-21V(z(k))成立的充分条件为( Φ1+ Γ1K)T P( Φ1+ Γ1K)-α-21P<0.由Schur补引理,上式等价于-α-21P( Φ1+ Γ1K)TΦ1+ Γ1K-P-1<0.将 Φ1=^Φ1+^D F^E代入上式,得-α-21P(^Φ1+^D F^E+ Γ1K)T ^Φ1+^D F^E+ Γ1K-P-1<0. 上述不等式两边同时乘以diag{P-1,I},并设X32 控 制 与 决 策第22卷=P-1,Y =KX ,得-α-21X(^Φ1X +^D F^E X + Γ1Y )T^Φ1X +^D F^F X + Γ1Y-X<0,即-α-21X(^Φ1X + Γ1Y)T^Φ1X + Γ1Y -X +^D F[^E X 0]+(^E X )TF T[0 ^D T]<0. 根据引理1,得-α-21X(^Φ1X + Γ1Y )T^Φ1X + Γ1Y -X +ε^D ^D T+ε-1(^E X )T[^E X 0]<0.再由Schur 补引理得式(9). 事件S 2发生时,按上述推导方法可以得到式(10).根据引理2,当式(8)~(10)成立时系统是指数稳定的,其衰减率为α.□定理1说明被控对象允许数据在传输过程中存在一定的丢失率.例如软实时系统,当网络发生拥塞时,系统可以主动丢弃一些非紧急数据来节约网络带宽,避免拥塞发生.4 仿真示例 假设网络控制系统中被控对象的状态方程为x (t )=010x (t )+1u (t ),y (t )=[1 0]x (t ). 系统的采样周期为0.3s ,网络通讯延迟在区间[0.3,0.6]s 内均匀分布,数据通过网络传输的成功率为90%.首先对被控对象离散化,得Φ=10.301,Γ0=0.01130.15,E 0=01,Γ1=0.03380.15,E 1=-1,D =10.1501.设控制器采用状态反馈控制,利用本文方法求解不等式(8)~(10),得α1=1.06,α2=0.76,α=1.02,ε=0.22,X =429.02-84.18811.5611.558-84.18821.343-4.52-4.489611.56-4.521.76161.566811.558-4.48961.56681.5626,Y =[11.54 -4.4105 1.3936 1.3908]. 进一步,可求得Lyap unov 函数中的对称正定矩阵P =0.02810.16950.02070.25860.16951.14200.13651.89070.02070.13655.2619-5.03710.25861.8907-5.03719.2101,控制器的状态反馈增益矩阵K =[0.0351 -0.2611 -0.0356 0.4354].假设系统的初始状态为[-2 3]T ,在上述控制律的作用下,网络控制系统的状态运动轨迹如图2和图3所示.从图可以看出,在网络通讯延迟是随机变化且存在一定程度数据包丢失的情况下,系统仍然能够快速达到稳定状态.图2 状态x 1的运动轨迹图3 状态x 2的运动轨迹5 结 语 由于网络控制系统中的节点通过共享的通讯网络交换信息,当网络带宽有限时,数据在传输过程中不仅具有传输延迟,而且可能产生数据包丢失.本文分析了网络传输延迟和数据包丢失对网络控制系统的性能影响,利用异步动态系统理论建立了传输延迟大于一个采样周期,同时具有数据包丢失的网络控制系统模型,给出了基于矩阵不等式的网络控制系统指数稳定的充分条件,利用该矩阵不等式可以很容易地求出系统的状态反馈控制器.仿真算例说明了该方法的有效性.参考文献(R eferences)[1]Branicky M S ,Phillip s S M ,Zhang W.Stability ofnetworked control systems :Explicit analysis of delay [C ].Proc American Control Conf.Chicago ,2000:235222357.(下转第29页)42第1期潘天红等:基于即时学习的非线性系统优化控制 [-0.175,+0.175],σε(t)=0.1的白噪声扰动[9].系统的跟踪情况如图5所示.由图5可知,系统能较好地跟踪设定轨迹.5 结 论 本文从信息向量的相似性角度,提出了k2 VNN即时学习算法,该算法能够提高局部建模的精度.将该算法与数据驱动(Data2driven)的逆控制方法相结合,在得到系统控制量的同时,用性能指标最优策略在线修正系统控制量,可得到当前的最优控制量.将其作用于系统,可实现系统跟踪控制.为提高系统的泛化能力,同时避免系统数据库过于庞大,提出了数据库更新策略,以适应系统新的工况要求.仿真结果表明了所提出方法的有效性.参考文献(R eferences)[1]Atkeson C G,Moore A W,Schaal S.Locally weightedlearning for control[J].Artificial Intelligence Review, 1997,11(1):752113.[2]Rhodes C,Morari M,Tsimring L S,et al.Data2basedcontrol trajectory planning for nonlinear systems[J].Physical Review E,1997,56(3):239822406.[3]Arif M,Ishihara T,Inooka H.Incorporation ofexperience in iterative learning controllers using locally weighted learning[J].Automatica,2001,6(37):8812 888.[4]Bertolissi E,Birattari M,Bontempi G,et al.Data2driven techniques for direct adaptive control:The lazy and the fuzzy approaches[J].Fuzzy Sets and Systems, 2002,128(1):3214.[5]孙维,王伟,朱瑞军.即时学习算法在非线性系统迭代学习控制中的应用[J].控制与决策,2003,18(3):2632 266.(Sun W,Wang W,Zhu R J.Interative learning control for nonlinear system using lazy learning method[J].Control and Decision,2003,18(3):2632266.)[6]Bontempi G,Birattari M,Bersini zy learning forlocal modeling and control design[J].Int J Control, 1999,72(7/8):6432658.[7]潘天红,李少远,王昕.基于即时学习的非线性系统多模型建模方法[C].第二十四届中国控制会议论文集.广州:华南理工大学出版社,2005:2682273.(Pan T H,Li S Y,Wang X.A multi2model modeling approach to nonlinear systems based on lazy learning[C].Proc of the24th Chinese Control Conf.Guangzhou:Publishing Company of South China University of Technology,2005:2682273.)[8]李柠,李少远,席裕庚.基于L PF算法的多模型建模方法[J].控制与决策,2002,17(1):11214.(Li N,Li S Y,Xi Y G.Multi2model modeling method based on L PF algorithm[J].Control and Decision, 2002,17(1):11214.)[9]Bontempi G.Local learning techniques for modelingprediction and control[D].Bruxelles:IRIDIA2 UniversitéLibre de Bruxelles,1999.[10]Cheng Cheng,Chiu Min2Sen.A new data2basedmethodology for nonlinear process modeling[J].Chemical Engineering Science,2004,13(59):28012 2810. (上接第24页)[2]Tip suwan Y,Chow M Y.Control methodologies innetworked control systems[J].Control Engineering Practice,2003,11(10):109921111.[3]Hokayem P F,Abdallah C T.Inherent issues innetworked control systems:A survey[C].Proc American Control Conf.Boston,2004:489724902. [4]Nilsson J,Bernhardsson B,Wittenmark B.Stochasticanalysis and control of real time systems with random time delays[J].Automatica,1998,34(1):57264. [5]Hu S S,Zhu Q X.Stochastic optimal control andanalysis of stability of networked control systems with long delay[J].Automatica,2003,39(11):187721884.[6]Li S B,Wang Z,Sun Y X.Delay2dependent controllerdesign for networked control systems with long time delays:An iterative L MI method[C].Proc of the5th World Congress on Intelligent Control and Automation.Hangzhou,2004:133821342.[7]Zhang W,Branicky M S,Phillip s S M.Stability ofnetworked control systems[J].IEEE Control Systems Magazine,2001,21(1):84299.[8]樊卫华,蔡骅,吴晓蓓,等.具有延时和数据包丢失的网络控制系统的稳定性[J].南京理工大学学报,2004,28(5):4652468.(Fan W H,Cai H,Wu X B,et al.Stability of networked control systems with time delay and data packet dropout[J].J of Nanjing University of Science and Technology,2004,28(5):4652468.)[9]Wang Y,Xie L,De Souza C E.Robust control of aclass uncertain nonlinear systems[J].Systems and Control Letter,1992,19(3):1392149.[10]Boyd S,Ghaoui L E,Feron E,et al.Linear matrixinequalities in system and control theory[M].Philadelphia:SIAM,1994.[11]Hassibi A,Boyd S P,How J P.Control ofasynchronous dynamical systems with rate constraints on events[C].Proc IEEE Conf Decision and Control, Phoenix,1999:134521351.92。
长时延丢包网络控制系统的分析与建模江卷,朱其新华东交通大学电气学院,南昌(330013)E-mail:broading@摘要:本文分析了网络控制系统中的主要问题,在传感器为时间驱动,控制器和执行器为事件驱动的前提下,提出了在综合考虑网络诱导时延、时序错乱和数据包丢失时网络控制系统的建模方法,并得出了网络控制系统模型。
关键词:网络控制系统;长时延;数据包丢失;建模1.引言网络控制系统(networked control systems,简记为NCS)是指通过网络形成闭环的反馈控制系统,是控制科学和飞速发展的计算机网络、以及通讯技术相结合的产物。
NCS与传统的点对点结构的系统相比,减少了复杂的物理连接、可以实现资源共享、实现远程操作与控制、具有高的诊断能力、安装与维护简便、能有效减少系统的重量和体积、增加了系统的灵活性和可靠性等诸多优点。
正因为这些优点使得网络控制系统得到广泛的应用,网络控制问题也得到了国际控制科学界和计算机科学界的广泛关注。
网络控制系统由传感器、控制器和执行器三部分组成。
传感器和控制器以及控制器和执行器之间是通过网络进行数据传输的。
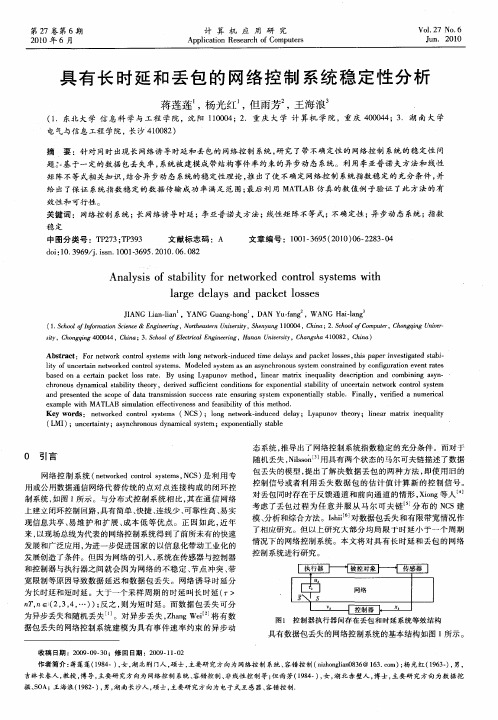
网络控制系统(NCS)的结构如图1所示。
图1 网络控制系统结构示意图由于网络加入控制系统中,给控制系统带来优点的同时,也给控制系统的研究带来了新的机遇和挑战。
在网络中由于不可避免地存在网络阻塞和连接中断,这又会导致网络数据包的时序错乱和数据包的丢失。
NCS中的网络诱导时延会降低系统性能甚至引起系统不稳定,现在时延系统的分析和建模近年来已取得很大发展。
文献【1, 2】提出了通过在系统的数据接收端设置一定长度的缓冲区的方法将ICCS的随机时延转化成一确定性时延,从而将一随机时变的系统转换成一确定性系统,并基于该确定性模型设计了ICCS的多步时延补偿器,并检验了系统模型中含有不确定参数时该补偿算法的鲁棒性。
文献【3】出了一种多输入多输出ICCS的时延补偿算法,并将使用下一步预测的标准环路传递再生方法推广到多步预测的情况。
由于NCS的确定性控制方法人为地扩大了网络诱导时延,从而降低了系统的性能因此很多学者研究了NCS的随机控制方法。
文献【4】分析了ICCS的网络诱导时延,在时延分析中考虑了信号丢失(message rejection)和无效采样(vacant sampling),并基于控制器的离散动态模型建立了ICCS 的离散模型,从而将一无限维连续的时延系统转换为一有限维离散系统,并且分析了具有周期性的随机网络诱导时延情况下ICCS 的稳定性。
文献【5, 6】于控制器的离散动态模型,建立了网络诱导时延小于一个采样周期并由一Markov 链决定网络时延概率分布的Nub 的闭环模型,分析了该闭环系统的稳定性,讨论了该闭环模型中增广的状态向量的方差矩阵的求取方法。
在网络中由于不可避免地存在网络阻塞和连接中断,这又必然会导致数据包的丢失。
虽然大多数网络都具有重新传输的机制,但它们也只能在一个有限的时间内传输,当超出这个时间后,数据也就会丢失。
一般来说,反馈控制的被控对象只能忍受一定比例的数据丢失,对一本来在没有数据包丢失时稳定的系统,当数据丢失率达到某一定值时,系统将变得不稳定。
文献【7】分析具有数据包丢失的网络控制系统的稳定性,并得出了系统保持稳定时的数据丢失率。
文献【8】在假设对象为线性时不变系统的情况下考虑了有数据包丢失的网络控制系统,利用终端不确定性原理的方法给了系统稳定的充分必要条件。
文件【9】通过建立NCS 的单包传输和多包传输的模型,描述了网络控制系统中数据丢失的特性以及其补偿方法。
并分析了NCS 中数据包丢失和实时性之间的关系,讨论了一种数据包丢失的补偿方法以及用实时修复的方法。
文献【10】主要考虑了有数据包丢失的网络控制系统的稳定性,考虑了数据包丢失的两种类型:一种是任意的数据包丢失;另一种则是把数据包丢失看成一个Markov 链,并用李雅谱若夫稳定性定理分析了两种情况下系统稳定时的数据丢失率。
目前,网络控制系统中网络诱导时延和数据包丢失的研究已取得可喜的成果,但这些文献都未能对网络诱导时延尤其是长时延、数据包丢失、数据包的时序错乱及信息损失等NCS 中的基本问题作综合考虑。
本文在综合考虑网络诱导时延(包括长时延)和数据包丢失的情况下提出了网络控制系统的建模方法。
并建立了网络控制系统状态反馈模型和全输出反馈模型。
2. NCS 的问题分析2.1 网络诱导时延NCS 的数据是通过网络传输的,由于网络本身的特点,数据在传输过程中不可避免地存在网络诱导延时和数据包丢失问题。
结合网络控制系统的特点,我们假设网络控制系统中传感器为时间驱动,且采样周期为T ,控制器和执行器为事件驱动。
在NCS 中,最新的数据便是最好的数据,在数据的发送端,可以给每个待发的数据后面加上时间戳,在数据的接收端,若检查到刚接收到的数据为新数据,则其用于控制,若发现其为老数据,则弃之不用。
为了分析的方便,特引入以下定义:定义1 传感器发送第k 个数据的时刻为k s t ,这个数据被传输到控制器时刻为ka t 。
第这个数据遭遇的网络诱导时延为k τ,k s k a k t t −=τ; 定义1 若网络诱导时延k τ满足T k <τ,则称这样的网络诱导时延为短时延;具有短时延的NCS 称为短时延NCS 。
定义2 若网络诱导时延k τ满足T k ≥τ,则称这样的网络诱导时延为长时延;具有长时延的NCS 称为长时延NCS 。
当数据传输遭遇长时延时,有可能导致前一时刻发送的数据比后一时刻发送的数据更晚到大控制器,即1+>k a k a t t ,则称数据包在传输过程中发生了时序错乱。
这种情况可能导致系统紊乱。
根据上面的分析,我们可以将在传输过程中遭遇网络诱导长时延并产生时序错乱的数据包看成在数据传输过程中丢失。
2.2 数据包丢失由于数据传输过程中的网络阻塞或网络连接中断,必不可免的会出现数据丢失。
在NCS图2 有数据包丢失的NCS中,数据传输中遭遇的数据包丢失问题可以看成一个开关系统,如图2所示。
假设待传输的数据[])3,2,1(,)()1()(""==k k x x k x T,在数据)(k x 传输过程中,若开关S 处于状态1时,数据通过网络顺利传输到控制器,控制器在这时刻用该数据进行控制;若开关S 处于状态0时,数据包丢失,此时,控制器用前一时刻接收到的数据进行控制。
数据经过网络传输到达控制器用于控制的数据可表示为,)()(ˆk x k x k Θ=,式中,[]Tk k θθ",1=Θ为数据丢失矩阵,其中,k θ为二元i 维向量,)(1k k diag ϕϕθ"=,若1=k ϕ,表示数据)(k x 被传输到控制器;0=k ϕ,表示传输的数据)(k x 丢失,这时应用前一数据进行控制即令11=−k ϕ。
3. NCS 的建模3.1 NCS 的状态反馈模型有网络诱导时延和数据包丢失的网络控制系统的结构图,如图3所示。
NCS 的离散线性时不变对象模型可表示为)()()1(k Bu k Ax k x +=+其中,m n R k u R k x ∈∈)(,)(,C B A ,,为适维矩阵。
控制器的模型为)(ˆ)(k x K k u k τ=,其中,}{k K τ是与随机时延k τ有关的随机序列。
图3 有网络诱导时延和数据包丢失的NCS 结构图根据上面对网络控制系统问题的分析,当数据在传输过程中遭遇长时延时,我们可以将其视为数据包丢失问题。
综合考虑网络控制系统的长时延和数据包丢失的问题,结合NCS 的结构图3可以得出:当1=k ϕ时,)()(ˆk k k x k xτθ−=,0=k ϕ时,)1()(ˆ1−Θ=−k x k x k 其中,⎪⎩⎪⎨⎧>=+丢失或在传输过程中数据顺利到达控制器数据)(0)(11k x t t k x k a k a k ϕ 结合上面的分析,可以得出有网络诱导时延和数据包丢失的NCS 闭环控制系统模型可以表示为)(ˆ)()()()1(k xBK k Ax k Bu k Ax k x k τ+=+=+ )]1()([)(1−Θ+−+=−k x k x BK k Ax k k k k τθτ (2)假设}{k τ为整数序列,且∞<≤≤s k d τ0,引入增广状态变量[]T T s T T d k x k x k x k x )()1()()−−=",则式(2)可变为:)][)1(1k x K B K B A k x k k k k θττ+Θ+=+− (3)式中⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=000000000000I I I A A "##%##""",⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=000#B B ,T k k ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡Θ=Θ−−00011#,Tk k ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=000#θθ 3.2 NCS 的输出反馈模型接下来考虑网络控制系统的全输出反馈模型,其结构图如图4所示,假设动态反馈控制器的模型为:⎩⎨⎧+=+=+)()()()()()1(k Jw k Hz k v k Gw k Fz k z 。
其中,)()()(k Cx k y k w k k Θ=Θ=plantdelay and/ordropoutcontrollerdelay and/ordropout图4 NCS 的输出反馈模型假设数据从控制器传输到执行器遭遇的网络诱导时延为k r ,假设}{k r 为整数序列,且∞<≤≤a k d r 0,控制信号)(k v 经过网络传输到执行器对对象进行控制时的信号⎩⎨⎧−Φ−=−或遭遇时序错乱传输过程中数据包丢失后到达执行器控制信号经过传输时延)1()()(1k v r r k v k u k k k k φ 其中,k φ类似于,k θ k Φ类似于k Θ。
引入增广状态变量[]TT a T T Td k v k v k v k z k z )()1()()()(−−=",所以控制器的模型可写成: )()()()()()1(k w J k z H k u k w G k z F k z +=+=+,式中 ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=000000000000I I H F F "##%##""" ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=00#J G G [][]⎩⎨⎧Φ=−失或遭遇时序错乱,传输过程中数据包丢后到达执行器延,控制信号经过传输时0000001""k k k r H φ ⎩⎨⎧=失或遭遇时序错乱,传输过程中数据包丢后到达执行器延,控制信号经过传输时J r J k 0结合被控对象模型⎩⎨⎧=+=+)()()()()1(k Cx k y k Bu k Ax k x ,引入增广状态变量[]TT Tk z k x x )()(~=则闭环系统动态模型可表示为:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡ΘΘ+=⎥⎦⎤⎢⎣⎡++)())1()1(k z k x F C G H B C J A k z k x k k 4. 结论本文详细分析了网络控制系统中的主要问题,在假设传感器为时间驱动,控制器和执行器为事件驱动的前提下,在综合考虑网络诱导时延、时序错乱和数据包丢失时,提出了网络控制系统的建模方法,并得出了网络控制系统的全状态反馈模型和全输出反馈模型。