AFS60高精度单圈绝对值编码器_AFM60高精度多圈绝对编码器_E
- 格式:pdf
- 大小:1.90 MB
- 文档页数:38
旋转编码器的类型区别与应用选择旋转编码器是一种经过验证的常用解决方案,适用于测量旋转轴的速度、运动方向或位置。
旋转编码器分为多种不同的类型,最主要的两种类型是绝对编码器和增量编码器。
它们的工作原理分别如何?有哪些区别?如何为应用选择适合的类型?编码器工作原理顾名思义,绝对编码器会直接输出正在测量的轴的确切位置。
每个旋转点都具有唯一的位置值或数据字,并在随轴一起旋转的码盘上编码。
码盘上唯一代码的数量决定了位置的表示精度。
编码器一旦开启,便立即使用光学、电容式或磁性传感器读取代码,并生成有效的输出。
而且,无需建立参考点或转动轴,传感器便能确定位置,并且即便编码器临时掉电,也能持续跟踪位置。
图1:绝对编码器的码盘为每个位置提供唯一代码,从而实现有效的即时输出,并确定编码器的分辨率。
(图片来源:CUI, Inc.)编码器的分辨率以位表示,对应于一圈内的唯一数据字数量。
绝对编码器可分为单圈和多圈两种类型,其中单圈版本提供一整圈(360°) 的位置数据,并且在轴的每一圈旋转中重复提供。
多圈类型包含一个转数计数器,能让编码器不仅输出轴位置,还能输出圈数。
下面是增量编码器:根据轴旋转时产生的脉冲来工作。
输出通常是两个相位差为90°的方波,并且需要额外的电路对这些脉冲进行跟踪或计数。
图2:增量编码器产生具有90°相位差的脉冲波形。
(图片来源:CUI, Inc.)增量编码器的分辨率以每转脉冲数(PPR) 表示,相当于任一方波输出的高脉冲数。
您可以阅读CUI 关于PPR 的博客文章,了解有关此主题的更多信息。
通过仔细观察图2,您会发现其中只有四个不同的重复输出状态。
因此,增量编码器必须以已知的固定位置为参考,才能提供有意义的位置信息。
这个“起始”位置就是编码器的索引脉冲。
然后通过跟踪旋转中相对索引脉冲的增量变化,来计算轴的绝对位置。
每次开。


AFS/AFM60 Ethernet IP 快速快速指引指引目录1.Ethernet/IP通讯 (3)2. AFS/AFM60机械安装 (4)2.1 盲孔型 (4)2.2 夹紧法兰型 (4)2.3 伺服法兰型 (5)3. AFS/AFM60电气安装 (5)3.1 电气接口定义 (5)3.2 以太网电缆制作 (6)4. AFS/AFM60通讯配置 (7)4.1 IP地址设定 (7)4.2 Rockwell软件配置 (9)5. AFS/AFM60常用功能 (14)5.1 分辨率比例缩放(Resolution/Scaling) (14)5.2 顺时针/逆时针(CW/CCW) (14)5.3 圆轴功能(Round axis) (14)5.4 修改预设值(Set Preset Value) (15)6. AFS/AFM60常见故障处理 (22)1.Ethernet/IP通讯MAC address每一个Ethernet/IP设备都有一个出厂设定好的专属的Mac地址,AFS/AFM60的Mac 地址包括3个字节制造商ID和3个字节的设备ID;IPAFS/AFM60的IP地址出厂默认为通过DHCP分配,也可以通过编码器背部的十进制编码开关设置成一个固定的IP地址(192.168.1.xxx);TCP/IP和UDP/IPEthernet/IP使用TCP/IP和UDP/IP两种传输协议。
UDP/IP用来传输实时信息,例如从编码器到控制器的I/O数据(位置速度);TCP/IP用来传输非实时信息,例如从控制器到编码器的参数配置;CIP应用层使用的是通用工业协议—Common Industrial Protocol有以下术语:• Class:一个设备的相关对象,由多个instance组成;• Instance:一个instance有不同的attribute表示其属性结构,同一个class的instance有相同的service和attribute结构,但attribute value可能不同。
有网友问:增量旋转编码器选型有哪些注意事项?应注意三方面的参数:1.械安装尺寸,包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。
2.分辨率,即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。
3.电气接口,编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。
其输出方式应和其控制系统的接口电路相匹配。
■二.※有网友问:请教如何使用增量编码器?1,增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。
2,增量型编码器通常有三路信号输出(差分有六路信号):A,B和Z,一般采用TTL电平,A脉冲在前,B脉冲在后,A,B脉冲相差90度,每圈发出一个Z脉冲,可作为参考机械零位。
一般利用A超前B或B超前A进行判向,我公司增量型编码器定义为轴端看编码器顺时针旋转为正转,A超前B为90°,反之逆时针旋转为反转B超前A为90°。
也有不相同的,要看产品说明。
3,使用PLC采集数据,可选用高速计数模块;使用工控机采集数据,可选用高速计数板卡;使用单片机采集数据,建议选用带光电耦合器的输入端口。
4,建议B脉冲做顺向(前向)脉冲,A脉冲做逆向(后向)脉冲,Z原点零位脉冲。
5,在电子装置中设立计数栈。
■三.※关于户外使用或恶劣环境下使用有网友来email问,他的设备在野外使用,现场环境脏,而且怕撞坏编码器。
我公司有铝合金(特殊要求可做不锈钢材质)密封保护外壳,双重轴承重载型编码器,放在户外不怕脏,钢厂、重型设备里都可以用。
不过如果编码器安装部分有空间,我还是建议在编码器外部再加装一防护壳,以加强对其进行保护,必竟编码器属精密元件,一台编码器和一个防护壳的价值比较还是有一定差距的。
■四.※从接近开关、光电开关到旋转编码器:工业控制中的定位,接近开关、光电开关的应用已经相当成熟了,而且很好用。
绝对值编码器简介(Absolute Encoder)绝对值编码器简介(Absolute Encoder)是相对于增量而言的,顾名思义,所谓绝对就是编码器的输出信号在一周或多周运转的过程中,其每一位置和角度所对应的输出编码值都是唯一对应的,如此,便具备掉电记忆绝对之功能也。
绝对式编码器是依据计算机原理中的位码来设计的,比如:8位码(0000 0011),16位码,32位码等。
把这些位码信息反映在编码器的码盘上,就是多道光通道刻线,每道刻线依次以2线、4线、8线、16线。
编排。
如此编排的结果,比如对一个单圈绝对式而言,便是把一周360°分为2的4次方,2的8次方,2的16次方,,,,位数越高,则精度越高,量程亦越大。
这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。
这样的编码器是由光电码盘的机械位置决定的,它不受停电、干扰的影响。
绝对编码器由机械位置决定的每个位置是唯一的,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。
这样,编码器的抗干扰特性、数据的可靠性大大提高了。
单圈绝对值编码器到多圈绝对值编码器旋转单圈绝对值编码器,以转动中测量光电码盘各道刻线,以获取唯一的编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码只能用于旋转范围360度以内的测量,称之为单圈绝对值编码器。
如果要测量旋转超过360度范围,就要用到多圈绝对值编码器。
编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。
多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点就可以了,而大大简化了安装调试难度。
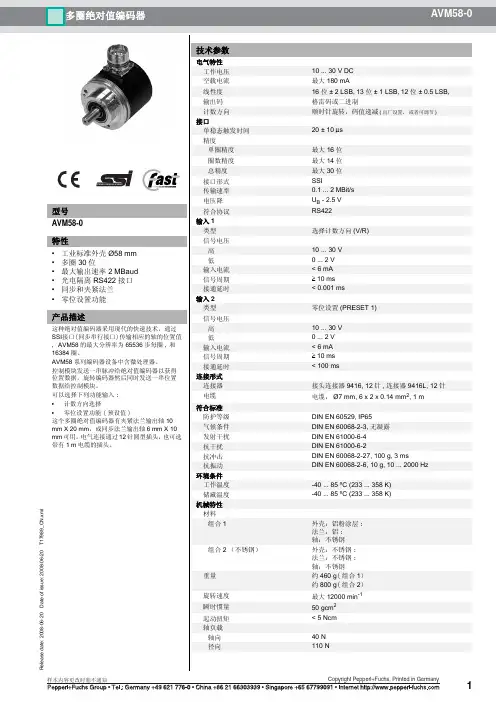
一、概述随着工业自动化的发展,编码器作为一种用于测量运动位置和速度的重要装置,得到了广泛的应用。
sick绝对值编码器作为一种性能稳定、精度高的编码器产品,其单圈数和多圈数的设计能够满足不同应用场合的需求,受到了市场的青睐。
本文将从sick绝对值编码器的单圈数和多圈数两个方面进行探讨和介绍。
二、sick绝对值编码器单圈数的特点和应用1. 单圈数概念单圈数是指编码器在一周内的旋转信号数,通常用来描述编码器的分辨率。
sick绝对值编码器单圈数的特点在于其具有高分辨率、低误差率和多种输出信号类型的优点。
2. 单圈数的应用在工业自动化中,sick绝对值编码器的高分辨率可以精确测量物体的位置和速度,可广泛应用于机床、机器人、输送机、自动化设备等领域。
其低误差率能够有效提高生产效率和产品质量。
三、sick绝对值编码器多圈数的特点和应用1. 多圈数概念多圈数是指编码器在多圈内的旋转信号数,与单圈数相比,多圈数编码器具有更高的分辨率和更广范围的应用。
2. 多圈数的应用sick绝对值编码器多圈数主要用于需要进行高精度测量的领域,如航空航天、汽车制造、医疗设备等。
其高分辨率和广泛的应用范围,使其成为许多高要求行业的首选产品。
四、sick绝对值编码器单圈数和多圈数的对比分析1. 分辨率相比单圈数编码器,多圈数编码器具有更高的分辨率,可以实现更精确的位置和速度测量。
2. 应用范围单圈数编码器主要适用于一些对精度要求不太高的应用场合,如一般的工业生产线。
而多圈数编码器主要用于一些对精度要求非常高的场合,如精密加工设备等。
3. 成本由于多圈数编码器具有更高的技术含量和更广泛的应用范围,其价格通常会高于单圈数编码器。
五、结论通过对sick绝对值编码器单圈数和多圈数的介绍和比较分析,我们可以看出,这两种编码器均具有各自的特点和优势,在不同的应用场合中发挥着重要作用。
在选择编码器时,应根据实际需求和预算进行合理的选择。
期待sick绝对值编码器在自动化领域的应用能够为工业生产和人们的生活带来更多的便利与效益。
AFS_AFM60 PROFINET 中文调试手册TIA博途版类型:调试指导版本:V2 日期:2017-7目录1.TIA博途配置 (3)1.1 安装GSD文件 (3)1.2硬件组态 (4)1.3 设定编码器相关参数: (4)2.功能调试 (6)2.1 读取编码器位置值: (6)2.2 修改预设值Preset (7)2.3 修改正反转 (8)2.4 修改分辨率 (9)3.故障显示: (10)1. TIA博途配置1.1 安装GSD文件1.1.1. 打开SICK官网,下载对应产品对应的GSDML文件;https:///cn/zh/在搜索栏里直接输入AFM60,进行搜索。
本文档测试使用TIA(博途)的西门子S7-1200,下载如下软件:1.1.2. 安GSDML文件,添加ProfiNet设备到网络上;在工具栏里找到“选项”→“管理通用站描述文件”,将先前下载的GSDML文件导入。
1.1.3. 安装完成后,可以在右侧栏的硬件目录中的“其他外部设备”中找到AFS/AFM60:1.2 硬件组态把AFS或AFM拖放到组态窗口中,并且进行总线连接.在AFM60A的属性中设置IP地址后,点击在线,得到以下正确显示:1.3 设定编码器相关参数进入编码器设备视图,可以找到以下参数设置模块Parameter Access Point:详细设定参考第二节。
本案例的输入字节从BYTE2开始:2. 功能调试PLC上线后,无报警时,编码器的指示灯如下:然后进行数据读取。
2.1 读取编码器位置值:编码器的输出报文81格式如下,a. 其中Position1是左对齐,PLC可直接监控,读出的值是实际值的4倍。
如下图,本案直接监控ID6,得到的就是左对齐编码器的值:b. Position2是右对齐数据,是编码器当前实际值,PLC需要修改输出值才可以得到此数据:对PLC的输出进行设置:首先, STW2_ENC的bit10置true,修改PLC对应的输出;其次,G1_STW的bit13置true,修改PLC对应的输出;最后,监控81报文的32位Position2内容,对应PLC的输入区域,本案监控ID10,就可以得到右对齐的编码器位置了。
多圈绝对值编码器的工作原理(转载)2010-04-30 08:14传统的绝对编码器光码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16线。
编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。
这样的编码器是由光电码盘的机械位置决定的,它不受停电、干扰的影响。
绝对编码器由机械位置决定的每个位置是唯一的,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。
这样,编码器的抗干扰特性、数据的可靠性大大提高了。
单圈绝对值编码多圈绝对值编码器旋转单圈绝对值编码器,以转动中测量光电码盘各道刻线,以获取唯一的编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码只能用于旋转范围360度以内的测量,称为单圈绝对值编码器。
如果要测量旋转超过360度范围,就要用到多圈绝对值编码器。
编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。
多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点就可以了,而大大简化了安装调试难度.绝对值多圈有电子增量计圈与机械绝对计圈等多种,(还有其他几圈方式,但不多见)。
机械绝对计圈,无论是每圈位置是绝对的,而且圈数也是绝对值的,但是,这样的话,圈数就有个范围,例如现在较多的4096圈和65536圈两种。
这样,就有人提出来,超过圈数还算不算绝对的在一次加工中不超过圈数,或停电移动不超过1/2圈数,当然是绝对的。
电子增量计圈,通过电池记忆圈数,实际上是单圈绝对,多圈增量,好处是省掉了一组机械齿轮,经济、体积小且没有圈数限制,似乎也不错,但是他毕竟是多圈增量的,不能算真正意义上的绝对值,什么是真正意义上的绝对值就是不依赖于前次历史的直接读数。
编码器 | S I C K8015560/2014-11-25如有变更,恕不另行通知E 绝对值型编码器E -107绝对值型编码器上海 季冉 实业 有限 公司021 -34-09 5728152-0194-6668编码器 | S I C K8015560/2014-11-25如有变更,恕不另行通知E 绝对值型编码器E -108应用绝对值型编码器的典型应用绝对值型编码器适用于任何存在轴位移的工厂和物料自动化应用,用于检测绝对位置。
此外,该系列产品还可根据每个接口的协议提供速度、诊断数据等其他信息。
客户在堆垛系统的托盘上堆叠多层塑料瓶时,必须在X 和Y 方向定位堆垛机的夹钳。
此时,绝对值型编码器就是您的理想选择。
AFM60绝对值型多圈编码器采用EtherNet/IP 接口,适用于此类应用。
您也可以使用AFM60 SSI 等采用SSI 接口的编码器堆垛系统 – 定位夹钳编码器 | S I C K8015560/2014-11-25如有变更,恕不另行通知E绝对值型编码器E -109应用装瓶厂 – 定位转盘工作台和输送带起重机 – 计算提升高度和夹钳的打开角度在装瓶生产线上,瓶子均集中在填充工作站的转盘工作台上,并随着转盘的转动从左手侧开始完成一些列填充操作。
装满后,瓶子将被放在输送带上。
此时,客户需要使用绝对值型编码器监控转盘工作台和输送带的位置和速度。
A3M60 PROFIBUS 等采用现场总线接口和循环轴功能的绝对值型多圈编码器正是该应用的理想之选。
您可以使用绝对值型编码器检测输送带速度,也可以使用配备多种接口的绝对值型编码器(如SSI+增量接口),检测输送带的速度和位置使用起重机移动和装载货物时,您必须检测夹钳高度。
此时,安装在测量鼓上的绝对值型编码器正是理想之选。
您还可以在夹钳上额外安装一个绝对值型编码器,计算夹钳的打开角度。
借助基于以太网的EtherNet/IP 、EtherCAT ® 或PROFINET 现场总线接口,AFM60 EtherNet/IP 绝对值型多圈编码器非常适用于此类应用,同时传输位置、速率以及其他参数。
AFS60/AFM60 绝对值型编码器EtherNet/IP 接口智能、强大、精准德国西克传感器产品简介目前,市场的发展趋势正日益朝向基于工业以太网的现场总线系统。
快速以太网、双端口交换机、全双工传输等技术发展,已将以太网变成了一个强大的通信系统。
基于工业以太网的现场总线系统优势明显,已成为未来工厂自动化、物流自动化与过程自动化的标准配置。
A F S60/A F M60绝对值型编码器,E t h e r N e t/I P接口|S I C K2• 优化了位置、速度、温度、工作时间等系统参数的最大与最小值范围,最大程度地提升了系统可用性• 采用光学原理的18位单圈分辨率或30位多圈总分辨率,实现了精确定位与最佳的转换效果• 配置5个双色LED 状态指示灯,实现了直观、可视的安全监控• 循环轴功能(带非二进制及小数值分辨率选项),节省了安装成本SICK 单圈、多圈绝对值型编码器AFS60/AFM60 自推出后广受市场欢迎;作为市场发展趋势的引领者,SICK 新近又在这两款产品上新增了3个时下最流行的以太网协议:PROFINET 、 EtherCAT 与EtherNet/IP 。
这两款产品因此而拥有更多、更强大的诊断功能,性能也更出色:全部三种型号均有夹紧法兰、伺服法兰及盲孔轴三种机械接口可选,同时配备通用转矩支架、联轴器、安装罩及多种类型的插头等等附件,适用于几乎所有应用。
A F S 60/A F M 60绝对值型编码器,E t h e r N e t /I P 接口 | S I C K 3“设备级环网”AFS60/AFM60,EtherNet/IP 接口AFS60/AFM60 EtherNet/IP接口绝对值型编码器的设备级环网(DRL)功能是该系列产品的一大显著特性。
DRL是一种革命性的环网拓扑技术,使用该技术后无需再使用交换机。
同时,此款编码器还实现了编码器至编码器的直接布线。
与星型网络拓扑相比,节省了布线所需的人力与成本。
绝对值编码器CANopen 使用说明书O idEncoder Ⓡ欧艾迪深圳欧艾迪科技有限公司●CANopen接口具有实时双向通讯能力,CANopen接口旋转编码器兼容CAN2.0电气规范。
用户可通过命令设置编码器的ID地址、零点、数据发送模式等参数,是目前最为友好的智能旋转编码器。
●由精密金属齿轮及多个高精度磁传感器构成的编码器,无须计数、无须电池、无须靠停电记忆;量程范围内任何位置都是唯一的,即使有干扰或断电运动,都不会丢失位置信息。
●可在任意位置设置零点,无需每次上电后初始化找零点,无需计数,掉电记忆,无需电池。
●360°非接触式传感器,相比光电编码器而言更耐振动、冲击,更耐水气油污,温湿度变化等。
●工业标准铁制外壳,铁外壳具有良好的屏蔽外部磁信号干扰的作用,是铝壳所达不到的。
且强度高、塑性好、抗震、抗粉尘、抗冲击。
●不锈钢输出轴,抗弯、抗扭、抗拉,防水设计,更加安全可靠。
●机械转换接口齐全,机械安装兼容性好;采用超柔拖链电缆,耐折耐拉伸。
●体积小、重量轻、低功耗、测量范围广,安装方便,使用寿命长。
●工业级标准接口保护,最高可达防雷级别。
●防护等级可达IP68级防尘防水,户外及严苛环境下,可放心使用。
广泛应用于机床、3D打印机、电控滑轨模组、自动化流水线、钢铁工业、运送设备、纺织机械、港口机械、塑料机械、起重机械、压力机械、玻璃机械、印刷机械、木材机械、包装机械、物流机械、轮胎机械、电梯自动化、水泥厂、工业机器人、喷码机、工程机械等自动化控制领域。
●绝对值编码器根据掉电记忆的范围可分为“单圈绝对值”和“多圈绝对值”编码器。
●单圈绝对值”只能记忆0~360°的位置信息,而“多圈编码器”在圈数范围内,圈数及角度唯一,即使掉电后仍有转动,重新上电后仍能立即反馈当前最新的位置信息。
●所以测量旋转在360°范围内应选择单圈,量程超过360°则应选择多圈编码器。
●如不需要掉电记忆的功能,则:可直接选择单圈绝对值编码器。
AFS/AFM60 Ethernet IP手机浏览器调试指引部门: 产品管理部 类型: 指导说明编写人: Carlos Wang 邮箱: Carlos.wang@ 版本: V1.0 日期: 2017-5-231.无线网络连接1.1.硬件需求用手机调试EthernetIP编码器,只需要准备一个便携式无线路由器就可以。
推荐使用可充电的无线路由器。
1.2.设置编码器的IP地址利用编码器拨码开关,调整IP地址后三位,本例调整为192.168.1.103:注:拨码开关只能调整后三位,前面固定为192.168.1.XXX。
其中:左下是百位;中上是十位;右下是个位。
1.3.配置无线路由器编码器通电之后,将网线一端接在编码器上,另一端接入无线路由器按照路由器说明书,用电脑连接到路由器,把路由器设置为AP接入点模式:然后配置无线网络密码:确认路由器网段为192.168.1.xxx1.4.手机接入无线网络搜索到无线路由器,然后登陆。
2. 使用手机调试编码器2.1 用浏览器连接编码器打开浏览器,地址栏输入编码器IP地址:192.168.1.103,可以看到主页面:使用以下信息登陆:用户名:AuthorizedClient密码:enc1232.2 首页内容介绍在首页,可以看到编码器的基本信息:产品名称、固件版本、IP地址、MAC地址、序列号、当前位置、运行故障状态等等。
点击首页下面的各个分项,可以查看对应的值:分别可以查看:设备信息;当前位置信息、速度信息、温度信息、运行时间信息。
2.3 修改编码器参数点击Home右侧的Parameterization,就可以对相应的参数进行设置。
首先看到的所有参数的当前设置和默认设置的比较:可点击Parameterization下面的各个参数,就可以进行相应的设置:常用功能介绍:A. 强制编码器预设值:首先,在Change Preset页面,设置你想要的预设值,比如“0”。
然后,进入Preset页面,可以看到当前Position是163790:最后,点击“Preset”按钮,当前Position被替换为0:B.修改编码器分辨率:点击Scaling,可以看到有CPR,Turns,CMR三个参数。
产品简介智能、强大、精准AFS60/AFM60 绝对值型编码器 PROFINET 接口德国西克传感器目前,市场的发展趋势正日益朝向基于工业以太网的现场总线系统。
快速以太网、双端口交换机、全双工传输等技术发展,已将以太网变成了一个强大的通信系统。
基于工业以太网的现场总线系统优势明显,已成为未来工厂自动化、物流自动化与过程自动化的标准配置。
A F S60/A F M60绝对值型编码器,P R O F I N E T接口|S I C K2• 优化了位置、速度、温度、工作时间等系统参数的最大与最小值范围,最大程度地提升了系统可用性• 采用光学原理的18位单圈分辨率或30 位多圈总分辨率,实现了精确定位与最佳的转换效果• 配置5个双色LED 状态指示灯,实现了直观、可视的安全监控• 循环轴功能(带非二进制及小数值分辨率选项),节省了安装成本SICK 单圈、多圈绝对值型编码器AFS60/AFM60 自推出后广受市场欢迎;作为市场发展趋势的引领者,SICK 新近又在这两款产品上新增了3个时下最流行的以太网协议:PROFINET 、 EtherCAT 与EtherNet/IP 。
这两款产品因此而拥有更多、更强大的诊断功能,性能也更出色:全部三种型号均有夹紧法兰、伺服法兰及盲孔轴三种机械接口可选,同时配备通用转矩支架、联轴器、安装罩及多种类型的插头等等附件,适用于几乎所有应用。
A F S 60/A F M 60 绝对值型编码器,P R O F I N E T 接口 | S I C K 3产品简介:AFS60/AFM60 PROFINET 接口高分辨率绝对值型编码器具备智能诊断功能与高速数据传输功能,可实现工业自动化应用中的绝对位置与速度的高精度测量。
其强大的工作温度、工作时间等参数的诊断与错误及早检测功能,极大地提升了网络的稳定性;多种配置选项如分辨率、旋转方向、测量速度单位均可更改,简化了安装并可针对不同应用自行调整;设计紧凑,适合狭小空间应用;嵌入式交换机技术最大程度地提升了系统与设备的可用性,从而提升了生产效率。
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201811581907.6(22)申请日 2018.12.24(71)申请人 前沿驱动(北京)技术有限公司地址 102400 北京市房山区弘安路85号院2号楼4层448室(72)发明人 崔昊天 闫巡戈 朱威 (74)专利代理机构 深圳市爱迪森知识产权代理事务所(普通合伙) 44341代理人 何婷(51)Int.Cl.G01D 5/249(2006.01)(54)发明名称多圈绝对值编码器、编码方法、控制器及存储介质(57)摘要本发明涉及旋转编码器技术领域,提供了一种多圈绝对值编码器、编码方法、控制器及存储介质。
编码器包括旋转轴、控制电路板、磁铁、霍尔传感器、控制器、主控制器、单圈绝对值编码器以及非易失性存储器。
控制电路板的一侧垂直设置旋转轴;磁铁与旋转轴固定连接;霍尔传感器设置于控制电路板的另一侧对应磁铁的位置,用于在断电后采集旋转轴的圈数信息;控制器用于在断电后采集霍尔传感器的数据;单圈绝对值编码器设置于控制电路板的一侧位于磁铁下部的位置,用于在上电后采集旋转轴的相对位置信息;主控制器计算旋转轴的绝对位置信息。
本发明实施例结构简单,体积小,易于集成。
权利要求书3页 说明书10页 附图8页CN 109556638 A 2019.04.02C N 109556638A1.一种多圈绝对值编码器,其包括一旋转轴,其特征在于,所述多圈绝对值编码器进一步包括:控制电路板,所述控制电路板的一侧垂直设置所述旋转轴;磁铁,所述磁铁设置于所述控制电路板的一侧,与所述旋转轴固定连接且与所述旋转轴作同步转动;霍尔传感器,所述霍尔传感器设置于所述控制电路板的另一侧对应所述磁铁的位置,用于在断电后采集所述旋转轴的圈数信息;控制器,所述控制器设置于所述控制电路板上,与所述霍尔传感器电连接,并通过一电池供电,用于在断电后采集所述霍尔传感器的数据;主控制器,所述主控制器设置于所述控制电路板上,与所述控制器电连接;单圈绝对值编码器,所述单圈绝对值编码器设置于所述控制电路板的一侧位于所述磁铁下部的位置,所述单圈绝对值编码器与所述主控制器电连接,用于在上电后采集所述旋转轴的相对位置信息;以及非易失性存储器,所述非易失性存储器设置于所述控制电路板上,与所述主控制器电连接,用于在断电时存储断电前通过所述主控制器计算的旋转轴的绝对位置信息;其中,所述主控制器根据所述旋转轴的圈数信息、所述旋转轴的相对位置信息以及上次断电时存储的所述旋转轴的绝对位置信息计算所述旋转轴的绝对位置信息。