路虎底盘系统及空气悬挂详解(PPT文档)
- 格式:ppt
- 大小:30.97 MB
- 文档页数:12
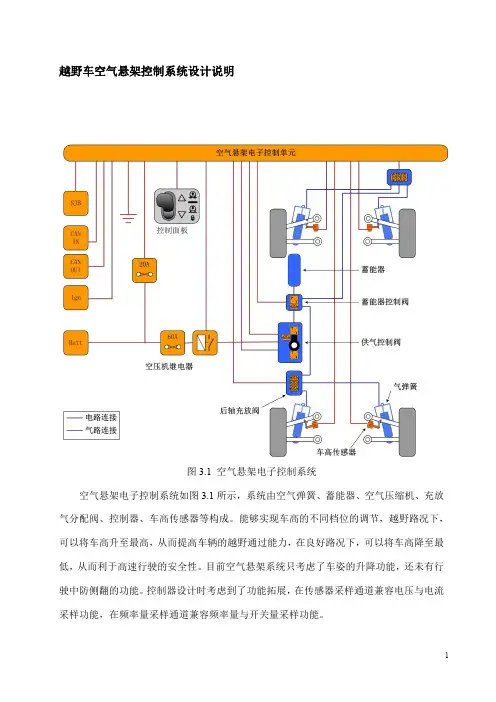
越野车空气悬架控制系统设计说明图3.1空气悬架电子控制系统空气悬架电子控制系统如图3.1所示,系统由空气弹簧、蓄能器、空气压缩机、充放气分配阀、控制器、车高传感器等构成。
能够实现车高的不同档位的调节,越野路况下,可以将车高升至最高,从而提高车辆的越野通过能力,在良好路况下,可以将车高降至最低,从而利于高速行驶的安全性。
目前空气悬架系统只考虑了车姿的升降功能,还未有行驶中防侧翻的功能。
控制器设计时考虑到了功能拓展,在传感器采样通道兼容电压与电流采样功能,在频率量采样通道兼容频率量与开关量采样功能。
3.1控制系统的设计采用MC9S12XEP100单片机,负责采集传感信号,实现CAN总线通讯,输出信号控制输出电路。
由频率量采样电路、模拟量采样电路、驱动电路、CAN总线通讯电路组成,通讯速率250kps。
图3.2硬件系统原理频率量采样电路实现对转速、空气流量传感器等具有脉冲输出的功能信号的采集,同时也能实现对开关信号的采集。
模拟量采样电路可以实现对开关信号的采集,也能实现对方向盘转角、车高角位移、气压、气温等传感器信号的采集。
驱动电路实现对气泵电机继电器的通断控制、悬架充放气阀件的控制。
CAN总线接口电路实现与整车总线的连接,采集车姿指令信息、当前车速信息、行驶操纵信息等信号;实现数据的上传;实现软件升级下载。
1.供电电路设计图3.3供电电路设计设定车载供电为24V,电压波动范围是16V至32V。
如果车载供电电压为12V,则将LM2937-12的输入与输出短接即可。
在此电路设计中增加输入电压钳位保护,利用SMCJ36A将输入电压保护在36V以下,实现对LM2575的保护;利用SMAJ6.0A将单片机工作电压保护在6V以下,防止在调试时操作不当,由于电压过高损坏单片机。
车载传感器可由VCC或+12VDC供电。
2.CAN总线电路设计图3.4CAN总线电路设计相对而言,PCA82C251相对其它芯片TJA1050、TJA1040、具有更广范围的供电电压,因此选用82C51。





已发布:11-五月-2011 车辆动态悬架- 车辆动态悬架说明和操作空气悬架部件位置项目零件号说明1储气罐2- 控制开关3- 后(右)减振器4- 后阀组5- 右后空气弹簧6- 储气罐阀组7- 压缩机总成8- 后(左)空气弹簧9- 左后减振器10- 左后高度传感器11- 右后高度传感器12- 空气悬架控制模块13- 左前滑柱总成14- 左前高度传感器15- 前阀组-右前高度传感器17-右前滑柱总成常规信息空气悬架系统是四角式系统,可安装与所有型号上。
该系统由空气悬架控制模块电气控制,该控制模块控制进气装置,对来自四个高度传感器的输入做出响应,并通过阀组将空气分配到系统中。
主要空气悬架系统部件包括:•空气悬架控制模块•供气装置•四个高度传感器•三个阀组总成•储气罐•空气线束•两个前支撑配有空气弹簧减振器模块•两个后空气弹簧模块四个角式空气悬架系统通过控制空气弹簧中的空气量来维持所有操作条件下的车辆高度。
无论车辆负荷如何,空气悬架控制模块均使用来自四个高度传感器信号来维持正确的悬架高度。
此外,系统允许驾驶员请求行驶高度变化,来改进越野性能,或方便上下车和装载货物。
系统自动调节行驶高度,以改进车辆在加速或减速时的操纵性能和动态性能。
这是通过操作气动控制阀,增加或减小空气弹簧中的空气量来实现的。
空气悬挂系统具有三个驾驶员可选择的预定义驾驶高度和自动高速行驶高度。
驾驶员接口界面指示所选的驾驶高度和高度变更。
其他消息也通过仪表组消息中心和声音警报(也通过仪表组传输)传输给驾驶员。
只有发动机运转且驾驶员和乘员车门关闭时,才能进行车辆高度调节。
空气悬架可以由驾驶员使用落地式控制台上的开关或车门上的开关来手动控制,以选择所需的高度。
当车辆转向、紧急加速或急制动时,系统将暂时禁止高度调整。
禁止功能可过降低有效弹簧刚度来防止车辆的紊乱。
高度调整也会因一些安全原因受到限制,例如当车门打开时和车辆静止时。
安装在Range Rover上的空气悬挂系统是由位于仪表板副驾驶一侧后面的空气悬架控制模块控制的。