路虎底盘系统及空气悬挂详解
- 格式:ppt
- 大小:31.57 MB
- 文档页数:294
「路虎案例」揽胜L322 空气悬挂故障【车型】揽胜L322【发动机】4.4 V8【故障里程】87541KM【故障频次】一直【故障现象】客户反映上坡时仪表显示故障,车身升降开关灯不亮,底盘降到最低。
【故障确认】与客户一同试车,悬挂升到越野高度在颠路行驶,车速大约50-60KM/H,悬挂自动降到标准高度,继续行驶约10 秒后仪表提示“SUSPENSION FAULT NORMAL HEIGHT ONLY”,悬挂升降开关指示灯熄灭。
用SDD 检测故障码为C1A20-64。
【故障诊断过程】1、查看本厂维修记录,更换过气泵、气泵继电器、前控制阀体、后控制阀体。
2、悬挂在标准高度,在颠路模仿客户的驾驶方法行驶,接SDD 查看悬挂数据流发现两个前角阀打开,而后角阀则没有打开。
3、根据故障码及数据流,初步判断前空气弹簧或管路有漏气或接错。
4、刷新RLM,试车故障依旧。
5、将悬挂升到越野高度断开电瓶线负极,第二天检查前面的两个空气弹簧高度没有明显的下降。
举升车辆检查,发现右前高度传感器和原车的不一样。
于是查看该车的全国维修历史,右前部发生过事故更换过右前空气弹簧、前阀体、右前气管等部件。
维修过前阀体的线束,拆装过储气罐。
在对维修过的部位检查时发现前阀体处到右前空气弹簧的气管(黄管)和从储气罐阀体来的主气管(篮管)接反。
【故障原因分析】气管接错后,走颠路快速颠簸,交叉阀打开时,左前空气弹簧的管路和主管路连通。
左前空气弹簧颠簸,致使主管路压力产生波动。
给储气罐充气时,一部分气体进入左前空气弹簧致使压力上升过慢。
【维修方案】将空气悬挂前阀体主供气管和右前气管按正确的位置装配。
【案例总结】1、维修前要查看故障车的维修历史(包括全国维修记录),重点是故障首次出现前的记录。
2、维修资料中没有介绍交叉阀、角阀的在什么工作情况下打开,可利用SDD 数据流功能和正常的车做对比,得出结论。
【专用工具设备】SDD案例点评及建议:充分利用数据流和工作原理图分析故障原因。

路虎发现(LR4)路虎揽胜运动版祝贺您购买阿尔诺特空气悬架产品。
我们非常自豪能够以行业最具竞争力的价格为您提供这款阿尔诺特公司的优质产品。
感谢您对我公司和此款产品的信任!正确的安装可以让你您体验并享受到本系统的优势。
在为您的车辆安装上这些组件之前,请先花一点时间阅读本安装说明。
拆卸和安装空气悬架产品应由完全合格的、具有自动化系统工程师(ASE)资格的专业人员完成。
安装新空气悬架系统时,还应了解所有必要的安全措施。
这包括适当地升高和固定车辆,并释放储能,防止人身伤害或财产损失。
警告:空气悬架系统处于压力状态(最高10 bar,或150 lbf/in)。
拆卸前,应确认压力已经释放,空气悬架系统的电源已断开。
系统应避免沾染污垢或油脂。
维修空气悬架系统时,务必佩戴标准的手、耳和眼睛防护装置。
“设计精良,经久耐用”阿尔诺特注重产品质量。
如您对阿尔诺特的任何产品存有疑问或困难,请与阿尔诺特联系,正常工作时间请致电800-251-8993,或发送电子邮件至****************************。
路虎发现(LR4)路虎揽胜运动版空气悬架压缩机拆卸1. 打开引擎盖,找到保险盒/电池盖。
(图1)基本信息:阅读本手册即表示您同意相关通用条款、免责和无损害协议约定的条款,全文详见。
• 储存温度不得低于5°F(-15°C)或高于122°F(50°C)。
• 避免损坏空气管路和电线。
• 必须由完全合格的专业人员拆卸和安装。
• 使用汽车制造商的诊断软件。
警告:不按说明书规定的方法或顺序操作,可能会损坏车辆和空气悬架系统。
为了避免操作电子元件时发生短路,请参阅您的用户手册,了解如何断开蓄电池。
关于车辆正确的千斤顶支点及其它保养、安全和维护说明,请参阅您的用户手册、维修手册,或咨询汽车经销商。
在任何情况下,如未获得充分的支撑,不得在车辆下方作业,因为这有可能引发严重的伤亡事故。
恒时四轮驱动确保无论是道路行驶还是越野行驶,动力都能够持续传送到四个车轮。
由于无需根据环境条件变化在两轮驱动和四轮驱动之间切换,卫士能够始终脚踏实地,永不停歇。
一旦任何一个车轮失去牵引力,其他车辆系统(锁止式中心差速器和牵引力控制)将会起作用。
两段式6速变速箱和锁止式差速器卫士所产生的巨大扭矩能够通过其坚固的两段式转换箱和6速变速箱得到充分的利用。
12个正传齿轮和2个反转齿轮可为司机提供多种齿轮比,以满足各种重载应用。
第一低速档可以降低爬行速度,使得道路行驶或越野行驶下均能轻松拖动车辆。
而第六高速档使车辆在道路上巡行时能够提高燃油的经济性。
在泥地、冰雪、以及松软地面等恶劣的越野条件下,中心差速器可以被锁定以保证动力能够平均分配到各轴之上,提供超强的牵引力。
带螺旋弹簧悬架的前后梁式轴卫士的前后梁式车轴坚固耐用,带有优良的跨角联接(卫士90为590mm,卫士110为655mm )。
越野行驶时可保证车轮能够最大程度贴合凹凸不平的地面。
全方位螺旋弹簧的作用是确保道路行驶和越野行驶的舒适性。
整体悬架设计使得底盘悬垂距离较短,并能为车辆提供极佳的接近角和离去角。
采用CommandShift?技术的6速自动变速器采用CommandShift?技术和运动模式的6速自动变速器是搭载190PS SD4柴油发动机和i6汽油发动机的路虎神行者2代的标准配置。
CommandShift?技术具有自动变速器的所有优点,并使驾驶者可进行连续手动换挡。
运动模式进一步提升车辆性能。
全地形反馈适应系统?路虎专利的全地形反馈适应系统?可轻松应付各种恶劣条件。
转动旋钮重新配置发动机、变速器和牵引力设置,在各种路况下均能为您带来最佳的驾驶体验:柏油路、草地、石子路、雪地、泥地、车辙和沙土地。
四轮电子牵引力控制系统(ETC)四轮电子牵引力控制系统(ETC)是先进的稳定控制系统,它能够感应车轮发生打滑的时间,并采用制动系统最大限量地减少车轮空转。
玩转四驱(20)路虎四驱技术详细讲解2011年04月06日 01:00 来源:汽车之家类型:原创编辑:张可[汽车之家汽车技术] 从去年年初我们开始了今年的年度大选题《玩转四驱》相继出了涵盖10于个品牌10几篇文章,可以说为广大网友安排了一场四驱盛宴,不夸张的说在汽车网络媒介中也带起了一小股四驱风。
如果你觉得Jeep和悍马这样的越野车过于硬朗传统,觉得昂克雷和讴歌MDX这样的SUV过于舒适安逸有些丧失野性的话那么本篇文章介绍的品牌就将奔放的越野与细腻的豪华相结合,它就是来自英国的路虎。
关于路虎品牌LAND ROVER这个品牌诞生于1948年,至今已经有了60多年的历史,然而这个源自英国的豪华品牌却经过了三次的转卖。
第一次为1994年,以8亿英镑的价格被宝马收购。
时隔六年后的2000年,以18亿英镑的价格出售给福特。
就在前年,也就是2008年印度汽车巨头塔塔用23亿美元收购了路虎。
第一辆路虎在1948年亮相,这两路虎使用了大量的铝镁合金,原因很简单,因为在二战后钢材紧缺,而供应制造飞机的铝合金材料却比较充裕。
这台路虎只有一款车型,轴距为80英寸,搭载一台1.6L汽油发动机,车型设计简洁,板材多为平直尽量减少材质冲压的步骤,并且为敞篷设计。
在1948年一整年的产量为3048辆。
1949年路虎的产量已经增长至8000辆,1950年翻倍成16000辆,在之后几年中一直保持着产量的增长。
本年英国军队订购了第一批路虎汽车,同年路虎还向军队提供了一批试验车,最后路虎被军方作为了标准轻型四轮驱动车。
直到50年代路虎经过了不同的改型,也推出了面对不同用途的改款车型,在50年代末60年代初期路虎的产量已经达到了50万辆。
在60年代末期,为了满足众多市场上的合法要求,大灯由原先进气格栅的位置移至翼子板上,这也与我们现在市场上销售的路虎车型外观上更为接近。
1970年6月17日路虎发布了第一代揽胜车型,第一代路虎揽胜并没有像现在的车型一样强调豪华。
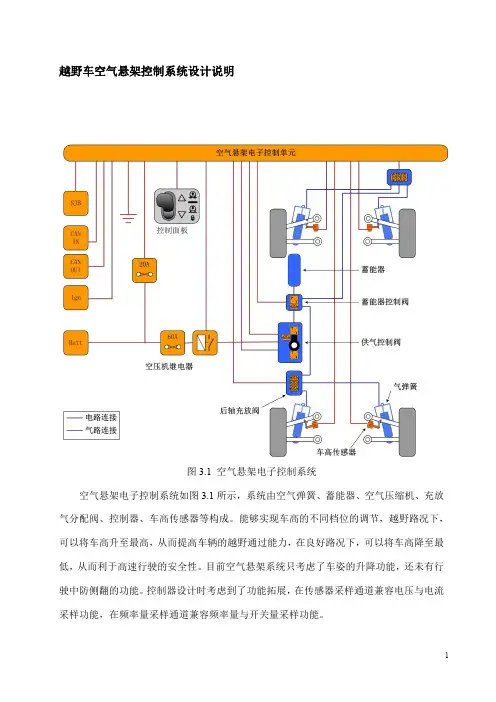
越野车空气悬架控制系统设计说明图3.1空气悬架电子控制系统空气悬架电子控制系统如图3.1所示,系统由空气弹簧、蓄能器、空气压缩机、充放气分配阀、控制器、车高传感器等构成。
能够实现车高的不同档位的调节,越野路况下,可以将车高升至最高,从而提高车辆的越野通过能力,在良好路况下,可以将车高降至最低,从而利于高速行驶的安全性。
目前空气悬架系统只考虑了车姿的升降功能,还未有行驶中防侧翻的功能。
控制器设计时考虑到了功能拓展,在传感器采样通道兼容电压与电流采样功能,在频率量采样通道兼容频率量与开关量采样功能。
3.1控制系统的设计采用MC9S12XEP100单片机,负责采集传感信号,实现CAN总线通讯,输出信号控制输出电路。
由频率量采样电路、模拟量采样电路、驱动电路、CAN总线通讯电路组成,通讯速率250kps。
图3.2硬件系统原理频率量采样电路实现对转速、空气流量传感器等具有脉冲输出的功能信号的采集,同时也能实现对开关信号的采集。
模拟量采样电路可以实现对开关信号的采集,也能实现对方向盘转角、车高角位移、气压、气温等传感器信号的采集。
驱动电路实现对气泵电机继电器的通断控制、悬架充放气阀件的控制。
CAN总线接口电路实现与整车总线的连接,采集车姿指令信息、当前车速信息、行驶操纵信息等信号;实现数据的上传;实现软件升级下载。
1.供电电路设计图3.3供电电路设计设定车载供电为24V,电压波动范围是16V至32V。
如果车载供电电压为12V,则将LM2937-12的输入与输出短接即可。
在此电路设计中增加输入电压钳位保护,利用SMCJ36A将输入电压保护在36V以下,实现对LM2575的保护;利用SMAJ6.0A将单片机工作电压保护在6V以下,防止在调试时操作不当,由于电压过高损坏单片机。
车载传感器可由VCC或+12VDC供电。
2.CAN总线电路设计图3.4CAN总线电路设计相对而言,PCA82C251相对其它芯片TJA1050、TJA1040、具有更广范围的供电电压,因此选用82C51。

文/河南 李韬(接上期)2.执行器48V电子动态响应系统执行器如图11所示。
执行器由原来的液压系统改为三相无刷直流电机,电机的工作原理如图12所示。
无刷直流电机按交流电(AC)原理工作。
电机有3个主电气连接(3相),每个连接都充当电源和接地(交流电)。
通过直流/直流转换器和48V超级电容器模块的组合供电。
这将保持备用容量,以确保始终有充足的电压可用。
直流-直流转换器使用车辆12V网络,将12V转换为48V(这可使这一系统适用于任何类型的动力总成系统)。
使用独立的48V电源,可以安装到纯电动车(BEV)、轻度混合动力电动汽车(MHEV)、插电式混合动力电动汽车(PHEV)上。
蓄电池在最佳环境条件下具有更高的能量和功率。
但在极端环境温度(低于-15℃,高于50℃)下的功率较低,可能无法支持执行器的高瞬态负载。
超级电容器可在比48V蓄电池更宽的温度范围(-40℃至60℃)内支持高瞬态负载。
1-行星齿轮组;2-后断开装置;3-横向稳定杆输出;4-3相无刷直流电机;5-执行器高压电缆;6-横向稳定杆输出;7-扭矩传感器。
图11 电子动态响应系统执行器3.控制说明48V电子动态响应系统控制框图如图13所示。
悬架控制模块B(CHCMB)计算所需的扭矩,并通过专用CAN将此信号发送至两个主动响应控制模块(ARCM)。
ARCM控制电机电流以获得请求的扭矩。
扭矩传感器反馈测量用于检查是否已达到请求的扭矩。
它根据横向稳定杆/电机位置、车身高度传感器位置和电流输入进行计算。
在平坦道路上的稳态转弯(恒定横向加速度)期间,电机将产生所需的扭矩,然后利用电机停转来保持该扭矩。
如果车轮随后发生颠簸,电机将退出该状态并进行旋转以保持所需的扭矩水平,然后随着车轮回位而逐渐恢复该状态。
如果电机未旋转,则会出现较大的扭矩峰值,乘客将会感觉到行驶不平稳。
电机旋转方向取决于哪一侧发生起伏。
在低速越野行驶和空气弹簧交叉阀连接的情况下,侧倾补偿会降低,以提高驾驶员的舒适性。


1 2938674591.RH (right-hand )后部弹簧和减震器总成2.RH 后高度传感器3.LH (left-hand )后部弹簧和减震器总成4.LH 后高度传感器 5.LH 前高度传感器 6.LH 前部弹簧和减震器总成 7.RH 前高度传感器 8.RH 前部弹簧和减震器总成 9. 自适 应减震模块(上接 37 页)┃ 图9 检查车辆的状态2┃ 图10 故障码路虎极光车辆动态悬挂结构组成与工作原理浙江/李宏流变液中产生磁场。
线圈会得到来 自 ADM 的 30kHz PWM (pulse width modulation )信号。
ADM 不断改变信 号,根据需要独立增减每个减震器的 减震力。
电流在 0A (减震力最低)和 5A (减震力最大)之间变化。
减震器剖面图,如图 3 所示。
一、部件位置(如图 1 所示) 二、部件说明 1.DAMPERS (减震器)注意:图 2 为后减震器,前减震器 与之类似。
自适应动态减震器为倒转单管式 减震器,其中包括磁流变液体,即液体 受到磁场干扰时其流动性将会改变。
这样即可电动调节减震力,以在车辆 控制和驾乘舒适性之间取得最佳平 衡。
磁流变液是合成的液态烃,其中 悬浮着铁颗粒。
磁流变液没有被磁化 时,铁颗粒随机分散,这样磁流变液具 有矿物油一样的稠度,减震力较低。
磁流变液被磁化时,铁颗粒整齐排序, 形成纤维状的结构,使得磁流变液更 黏稠,从而提高减震力。
取决于磁场 强度,磁流变液可以从提供较低减震 力的类似矿物油的稠度一直变到提供较高减震力的纤维性稠度。
磁场是由 两个整合到减震器活塞中的线圈产生 的,线圈通过架空引线和外部电气接 头与 ADM 连接。
磁流变液在减震 器活塞的通道中从高压侧流向低压侧 时,如果线圈被 ADM 通电,则会在磁然后点击继续(如图 8、图 9 所示),在 接下来的提示中输入正确的匹配代码 完成仪表盘模块的匹配工作。
如果新仪表盘模块没有匹配或 者匹配过程失败没有完成最终匹配的 话,在仪表盘模块中会读取到故障码 B 100051 仪表盘模块不能变量编码, 如图 10 所示。

50栏目编辑:刘玺 *****************新车新技术(接上期)2023款新揽胜减振器内部部件如图22所示,减振器压缩过程中的内部工作状态如图23所示,在减振器压缩过程中,迫使机油向上流过下行活塞以及流过底座阀。
同时,迫使机油流过压缩控制电磁阀中的可变节流孔。
节流孔的大小决定了允许多少机油通过垂直油道并进入回弹室。
机油流速越低,减振器就变得越硬。
机油流速越高,减振器就变得越软。
减振器回弹过程中的内部工作状态如图24所示,在减振器回弹过程中,迫使机油通过活塞流入压缩室。
同时,迫使机油向下流过垂直油道以及回弹控制电磁阀中的可变节流孔。
节文/河南 李韬1-4-5-图24 减振器回弹过程(3)俯仰率控制-使用CAN输入。
每秒预估由驾驶员执行加速和制动输入引起的车辆纵倾率100次,然后增大减振作用以减小纵倾率。
(4)颠簸反弹控制-使用悬架高度传感器输入。
每秒500次监测车轮位置,随减振器接近其行程末端而增大减振率。
(5)车轮垂直跳动控制-使用悬架高度传感器和CAN输入。
每秒500次监测车轮位置,检测车轮何时开始以其正常频率振动,并增大减振作用以减小车轮的竖向运动。
其他补充控制说明如下:(1)回弹弹簧。
由于在道路转弯处行驶时会发生重量转移,所以弯道内侧的减振器杆会向外延伸,内部回弹弹簧通过限制这种延伸来为车辆侧倾提供额外阻力。
(2)俯仰控制。
在减速期间,该功能可以使用来自车辆自适应巡航系统的、有关512023/05·汽车维修与保养栏目编辑:刘玺 *****************新车新技术即将到来的速度变化的信息预先阻止和减少车辆俯仰运动。
通过使用压缩电磁阀让前减振器变硬,可以控制压缩减振。
(3)碰撞缓冲。
该功能使用来自前方碰撞警报系统的信息,通过切换到动态模式设置,使悬架系统准备好进行可能的规避操作。
该功能使用来自前方碰撞警报系统的信息,通过切换到动态模式设置,使悬架系统准备好进行可能的规避操作。
已发布:11-五月-2011 车辆动态悬架- 车辆动态悬架说明和操作空气悬架部件位置项目零件号说明1储气罐2- 控制开关3- 后(右)减振器4- 后阀组5- 右后空气弹簧6- 储气罐阀组7- 压缩机总成8- 后(左)空气弹簧9- 左后减振器10- 左后高度传感器11- 右后高度传感器12- 空气悬架控制模块13- 左前滑柱总成14- 左前高度传感器15- 前阀组-右前高度传感器17-右前滑柱总成常规信息空气悬架系统是四角式系统,可安装与所有型号上。
该系统由空气悬架控制模块电气控制,该控制模块控制进气装置,对来自四个高度传感器的输入做出响应,并通过阀组将空气分配到系统中。
主要空气悬架系统部件包括:•空气悬架控制模块•供气装置•四个高度传感器•三个阀组总成•储气罐•空气线束•两个前支撑配有空气弹簧减振器模块•两个后空气弹簧模块四个角式空气悬架系统通过控制空气弹簧中的空气量来维持所有操作条件下的车辆高度。
无论车辆负荷如何,空气悬架控制模块均使用来自四个高度传感器信号来维持正确的悬架高度。
此外,系统允许驾驶员请求行驶高度变化,来改进越野性能,或方便上下车和装载货物。
系统自动调节行驶高度,以改进车辆在加速或减速时的操纵性能和动态性能。
这是通过操作气动控制阀,增加或减小空气弹簧中的空气量来实现的。
空气悬挂系统具有三个驾驶员可选择的预定义驾驶高度和自动高速行驶高度。
驾驶员接口界面指示所选的驾驶高度和高度变更。
其他消息也通过仪表组消息中心和声音警报(也通过仪表组传输)传输给驾驶员。
只有发动机运转且驾驶员和乘员车门关闭时,才能进行车辆高度调节。
空气悬架可以由驾驶员使用落地式控制台上的开关或车门上的开关来手动控制,以选择所需的高度。
当车辆转向、紧急加速或急制动时,系统将暂时禁止高度调整。
禁止功能可过降低有效弹簧刚度来防止车辆的紊乱。
高度调整也会因一些安全原因受到限制,例如当车门打开时和车辆静止时。
安装在Range Rover上的空气悬挂系统是由位于仪表板副驾驶一侧后面的空气悬架控制模块控制的。