3、自然摆动的单摆机械能守恒问题新解(极坐标处理)
- 格式:doc
- 大小:274.50 KB
- 文档页数:4

用单摆验证机械能守恒定律的实验设计与反思实验设计实验目的:验证机械能守恒定律实验原理:单摆在振动过程中,重力势能和动能不断转化,但总机械能守恒。
当单摆摆动到最高点时,动能为零,重力势能最大;当单摆摆动到最低点时,重力势能为零,动能最大。
实验器材:单摆、计时器、测量尺、万能表、电池、导线等。
实验步骤:1.将单摆固定在支架上,调整单摆长度,使其摆动周期在1秒左右。
2.将单摆摆动到最高点,用测量尺测量单摆离开支架的高度h1。
3.记录单摆通过最低点时的时间t1。
4.将单摆摆动到最低点,用测量尺测量单摆离开支架的高度h2。
5.记录单摆通过最高点时的时间t2。
6.根据公式E=mgΔh计算单摆在两个位置的重力势能差ΔE。
7.根据公式v=Δx/Δt计算单摆通过最低点时的速度v1和通过最高点时的速度v2。
8.根据公式E=1/2mv^2计算单摆在两个位置的动能E1和E2。
9.计算单摆在两个位置的总机械能E=E1+E2+ΔE。
10.比较单摆在两个位置的总机械能,验证机械能守恒定律。
反思本实验通过单摆的振动过程验证了机械能守恒定律。
在实验过程中,需要注意以下几点:1.单摆的长度应该调整到合适的位置,使其摆动周期在1秒左右,以便于测量。
2.测量单摆离开支架的高度时,需要保证测量尺垂直于地面,避免误差。
3.测量单摆通过最低点和最高点的时间时,需要使用计时器,保证精度。
4.在计算重力势能和动能时,需要注意单位的转换,保证计算结果的准确性。
5.在比较单摆在两个位置的总机械能时,需要考虑实验误差的影响,尽可能减小误差。
本实验不仅验证了机械能守恒定律,还锻炼了学生的实验操作能力和数据处理能力。
同时,本实验也可以扩展到其他物理实验中,如弹簧振子、滑块等,进一步加深学生对机械能守恒定律的理解。

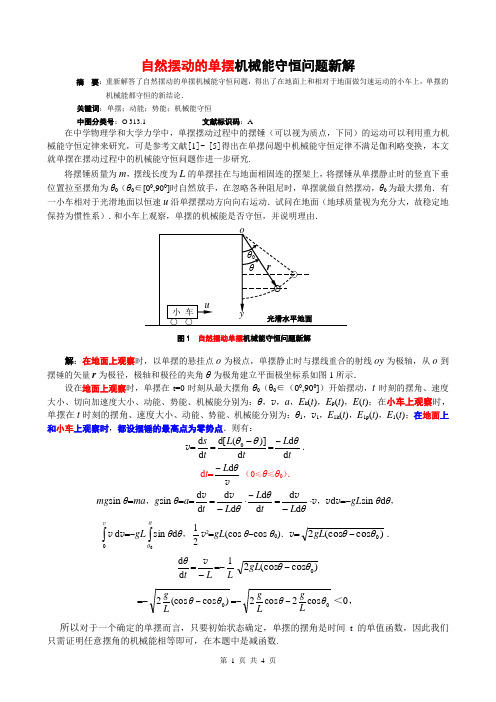
自然摆动的单摆机械能守恒问题新解摘 要:重新解答了自然摆动的单摆机械能守恒问题,得出了在地面上和相对于地面做匀速运动的小车上,单摆的机械能都守恒的新结论.关键词:单摆;动能;势能;机械能守恒中图分类号:O 313.1 文献标识码:A在中学物理学和大学力学中,单摆摆动过程中的摆锤(可以视为质点,下同)的运动可以利用重力机械能守恒定律来研究,可是参考文献[1]- [5]得出在单摆问题中机械能守恒定律不满足伽利略变换,本文就单摆在摆动过程中的机械能守恒问题作进一步研究.将摆锤质量为m ,摆线长度为L 的单摆挂在与地面相固连的摆架上,将摆锤从单摆静止时的竖直下垂位置拉至摆角为θ0(θ0∈[00,900]时自然放手,在忽略各种阻尼时,单摆就做自然摆动,θ0为最大摆角.有一小车相对于光滑地面以恒速u 沿单摆摆动方向向右运动.试问在地面(地球质量视为充分大,故稳定地保持为惯性系).和小车上观察,单摆的机械能是否守恒,并说明理由.解:在地面上观察时,以单摆的悬挂点o 为极点,单摆静止时与摆线重合的射线oy 为极轴,从o 到摆锤的矢量r 为极径,极轴和极径的夹角θ为极角建立平面极坐标系如图1所示.设在地面上观察时,单摆在t=0时刻从最大摆角θ0(θ0∈(00,900])开始摆动,t 时刻的摆角、速度大小、切向加速度大小、动能、势能、机械能分别为:θ,v ,a ,E k (t ),E p (t ),E (t );在小车上观察时,单摆在t 时刻的摆角、速度大小、动能、势能、机械能分别为:θ1,v 1,E 1k (t ),E 1p (t ),E 1(t );在地面上和小车上观察时,都设摆锤的最高点为零势点.则有:v =ts d d =t L d )]([d 0θθ-=t θL d d -. d t =vθL d -(0≤θ≤θ0). mg sin θ=ma ,g sin θ=a =t d d v =θL d d -v ⋅t θL d d -=θL d d -v ⋅v ,v d v =-gL sin θd θ, ⎰v v 0d v =-gL ⎰θθ0sin θd θ,21v 2=gL (cos θ-cos θ0).v =)cos (cos 20θθgL -. t θd d =L -v =-L 1)cos (cos 20θθgL -=-)cos (cos 20θθL g -=-0cos 2cos 2θL g θLg -<0, 所以对于一个确定的单摆而言,只要初始状态确定,单摆的摆角是时间t 的单值函数,因此我们只需证明任意摆角的机械能相等即可,在本题中是减函数.图1 自然摆动单摆机械能守恒问题新解E k (t )= E k ′(θ)=21m v 2=mgL (cos θ-cos θ0); E P (t )= E P ′(θ)= -0mgLsin θθ⎰θd θ=- m gL ⎰θθ0sin θd θ= -mgL (cos θ-cos θ0)E (t )=E k (t )+E P (t )= E k ′(θ)+E P ′(θ)=mgL (cos θ-cos θ0) -mgL (cos θ-cos θ0)=0.所以在地面上观察时单摆的机械能守恒,守恒值为0.直觉判断:因为摆锤在最高点以匀速度u 相对于小车沿x 轴负向运动,我们规定此时的势能为0,所以在小车上观察时,单摆的机械能比在在地面上观察时增加21m (-u )2=21mu 2,所以在小车上观察时,单摆的机械能为: E 1(θ)=E (θ)+21mu 2=0+21mu 2=21mu 2(常数). 所以,在小车上观察时,单摆的机械能守恒,守恒值为21mu 2. 数学推导:在地面系——设初相为0,v=ωR,x=Rcos ωty= R sin ωt 将运动方程作伽利略变换,写出小车系运动方程:x 1=x-ut=Rcos ωt-uty 1= y=R sin ωt因此在小车系,轨迹仍然是一个圆,圆心做匀速直线运动,向心力与弧线垂直.在小车上观察(即以小车为静止系)时有:θ1v =v -u cos θ,21θv = (v -u cos θ)2=2v +2u 2cos θ-2v u cos θ;r 1v =-u sin θ,21r v =2u 2sin θ.21v =21θv +21r v =2v +2u 2cos θ-2v u cos θ+2u 2sin θ=2v +2u +2u ⋅v cos θ= 2gL (cos θ-cos θ0)+u 2+2u ⋅)cos (cos 20θθgL -cos θ.E 1k (t )= E 1k ′(θ)=21m 21v =mgL (cos θ-cos θ0)+21mu 2+mu ⋅)cos (cos 20θθgL -cos θ. v =ts d d =t L d )]([d 0θθ-=t θL d d -,d t =v θL d -(0≤θ≤θ0).a 1=a =g sin θ.ma 1=ma =mg sin θ.0-E 1p (t )= -E 1p ′(θ)= ⎰θθma 01d s +⎰t u ma 01cos θd t +⎰tm 0L 2v u sin θd t = ⎰θθθmg 0sin (-L d θ)+mu ⋅⎰⎪⎪⎭⎫ ⎝⎛+tθL θθg 02sin cos sin v v θL d -=-mgL ⎰θθθ0sin d θ+ muL ⋅⎰⎪⎭⎫ ⎝⎛-+θθL θθgL θg 0)cos (cos 2cos 0v θdcos = mgL cos θθθ0+mugL ⋅⎰-+θθθθθ0)cos 2cos 2(cos 0)cos (cos 2cos d 0θ-θgL θ=mgL (cos θ-cos θ0)+gL mugL 23 ⎰--+-θθθθθθθθ00000cos cos cos 32cos cos cos dcos θ= mgL (cos θ-cos θ0)+gL mugL 23⋅32(cos θ-cos θ023) +gLmugL 2⋅2 (cos θ-cos θ021)cos θ0= mgL (cos θ-cos θ0)+mu ⋅gL 2(cos θ-cos θ023) +mu ⋅gL 2(cos θ-cos θ021)cos θ0=mgL (cos θ-cos θ0)+mu ⋅gL 20cos cos θθ-(cos θ-cos θ0+cos θ0)=mgL (cos θ-cos θ0)+mu ⋅)cos (cos 20θθgL -cos θ.E 1p (t )= E 1p ′(θ)=-mgL (cos θ-cos θ0)-mu ⋅)cos (cos 20θθgL -cos θ.E 1(t )=E 1k (t )+E 1p (t )= E 1k ′(θ)+E 1p ′(θ)=mgL (cos θ-cos θ0)+21mu 2+mu ⋅)cos (cos 20θθgL -cos θ+ -mgL (cos θ-cos θ0)-mu ⋅)cos (cos 20θθgL -cos θ=21m 2u (常数). 所以在小车上观察时,单摆的机械能守恒,守恒值为21m 2u . 当u =0时两个坐标系重合,守恒值相等,符合玻尔的对应原理.说明:文献[1]和[2]都认为拉力F 对于小球做功,造成机械能不守恒,上面的推导证明文献[1]和[2]的观点是错误的.通过本文我们也可以看出在单摆问题中绳子的约束力是一个保守力,可以改变动能和势能,但是不改变系统的机械能,与直接计算重力机械能得出的结果一致.定理:质点做圆周运动的约束力是一个保守力,可以改变动能和势能,但是不改变质点的机械能.在小车系摆锤在最低点的动能和势能分别为: E 1k (t )= E 1k ′(θ) =21m (v +u )2=21m (v 2+u 2+⋅2u v )=21m v 2+21mu 2+mu v = mgL (1-cos θ0)+21mu 2+mu ⋅)cos 1(20θgL -. E 1p (t )=-mu ⋅)cos 1(20θgL -.E1p (t )=E 1p ′(θ)= -mgL (cos 0-cos θ0)-mu 0=-mgL (1-cos θ0)-mu ⋅与地面系的结果不同,当u =0时与地面系一致,符合玻尔的对应原理.E 1(t )=E 1k (t )+E 1p (t )= E 1k ′(θ)+E 1p ′(θ)=mgL (1-cos θ0)+21mu 2+mu ⋅)cos 1(20θgL --mgL (1-cos θ0)- mu ⋅)cos 1(20θgL -= 21mu 2(常数). 因此摆锤在最低点的势能不再相等,因为势能的零点发生了变化.在上面的单摆问题中势能只能说是与重力有关的势能,不是严格意义上的重力势能,因为质点受到的合力不等于重力.在本题中摆线的力是一个保守力,也是一个弹力,只不过认为摆线的劲度系数为无穷大,忽略形变,因此本题是两个保守力共同作用下的机械能守恒问题.当观察者相对于单摆静止时,利用重力机械能守恒定律得出的结果等效;当观察者相对于单摆的悬挂点匀速运动时,直接利用重力机械能守恒定律是错误的,应该利用保守力所做的功等于势能的减少来计算.在小车系看来,摆线的作用力并不始终与位移垂直,摆线的作用力也做功,改变了摆锤的动能,不过也改变了摆锤的势能,不改变摆锤的机械能,机械能守恒定律中的保守力应该是保守力的合力,本题中如果按照重力机械能计算显然不满足力学相对性原理,参见文献[1]- [6].参考文献:[1]蔡伯濂.关于力学相对性原理与机械能守恒综述[J ].大学物理,1994,(13)1:20~22.[2]何红雨.机械能守恒定律与惯性参照系的选择[J ].广西物理,1997,(18)3:27~29.[3]金若兴. 机械能守恒定律的条件. 物理教学,1985年1月[4]熊秉衡. 在不同惯性系中的机械能守恒定律.物理(原名《物理通报》),1964(6):261~264.[5]施肖铮. 在不同惯性系中的机械能守恒定律,常州信息职业学院学报,2002年12月,第1卷第2期[6]熊秉衡. “在不同惯性系中的机械能守恒定律”一文的更正与补充.物理(原名《物理通报》),1965(3):116~117 New interpretation of mechanical energy conservation of a natural swinging single pendulumAbstract :It refurbished the issue of mechanical energy conservation of a natural swinging single pendulum, which straightforwardly led to conclusion, no matter we take reference frame of the earth itself or the cart moving in uniform speed to the earth, the mechanical energy of a natural swinging single pendulum is always conservative.Key words :the single pendulum ;kinetic energy ;potential energy ;conservation of mechanical energy。

能量守恒定律在机械系统中的实际应用案例能量守恒定律是自然界中一个重要的基本原理,它在机械系统中有着广泛的应用。
本文将介绍几个实际案例,以展示能量守恒定律在机械系统中的实际应用。
案例一:摆钟摆钟是一种常见的机械系统,它利用摆动的物体来测量时间。
摆钟的核心部件是一个摆锤,它在重力的作用下摆动。
根据能量守恒定律,摆锤在摆动过程中,势能和动能之间会相互转化,但总能量保持不变。
当摆锤被拉到一侧释放时,它具有最大的势能。
随着摆动的进行,势能逐渐转化为动能,同时摆锤的速度增加。
当摆锤摆到另一侧时,动能达到最大值,而势能减小到最小值。
在整个摆动过程中,摆锤的总能量保持不变。
通过测量摆锤的摆动周期,我们可以计算出摆钟的时间。
这是因为摆锤的摆动周期与摆锤的长度有关,而摆锤的长度与重力势能有关。
因此,能量守恒定律在摆钟中的应用使得我们能够准确地测量时间。
案例二:弹簧振子弹簧振子是另一个常见的机械系统,它由一个弹簧和一个挂在弹簧上的物体组成。
当物体受到外力推动或拉伸时,弹簧会产生反作用力,使物体回到平衡位置。
在弹簧振子的运动过程中,能量守恒定律同样起到了重要的作用。
当物体被推动或拉伸时,它具有动能和势能。
随着振动的进行,动能和势能之间会相互转化,但总能量保持不变。
当物体达到最大位移时,势能最大,而动能最小。
当物体通过平衡位置时,动能最大,而势能最小。
在整个振动过程中,物体的总能量保持不变。
弹簧振子的周期与弹簧的劲度系数和物体的质量有关。
通过测量振动周期,我们可以计算出弹簧的劲度系数。
因此,能量守恒定律在弹簧振子中的应用使得我们能够测量弹簧的性质。
案例三:滑坡滑坡是一种常见的地质灾害,它是由于山体失稳导致的大规模土壤和岩石的滑动。
在滑坡的过程中,能量守恒定律同样起到了重要的作用。
当山体失稳时,上方的土壤和岩石开始滑动。
在滑动过程中,由于重力的作用,它们具有动能。
随着滑动的进行,动能逐渐转化为摩擦热和声能,同时滑动速度减小。

2.6实验3单摆验证机械能守恒定律(总3页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--实验3 单摆验证机械能守恒定律【实验目的】验证机械能守恒定律。
【实验器材】铁架台、细线(长约)、小钢球、画有等高标记线的背景板、光电门传感器、数据采集器、计算机。
实验装置图如图所示。
【实验原理】物体在摆动过程中的重力势能和动能可以互相转化,但总的机械能守恒。
设物体自高为h处释放,摆至最低点时的速度为v,则mgh= 。
利用光电门测出物体在最低点的速度,即可验证机械能是否守恒。
【实验设计与步骤】在图所示的背景板上摆球运动过程中的最低点处固定一光电门,仔细调整光电门的高低位置,使得摆球通过光电门时恰好摆球中心水平直径挡光,即挡光长度为摆球d,在数字计时器上读出挡光时间t,可计算出摆球通过光电门时的速度为v= ,求出动能E ;测出摆球释放点距摆球运动过程中最低点的垂直距h,以最低点为参考平面,分别计算两侧最高点的重力势能E ,比较E 和E 是否相等,验证机械能守恒。
1.在图所示的背景板上摆球运动过程中的最低点处固定一光电门,仔细调整光电门的高低位置,使得摆球通过光电门时摆球中心水平直径恰好挡光。
2.把小钢球用细线悬挂起来,把小球依此拉到宝鸡县A、B、C、D点处释放,并分别记录摆球释放点距离摆球运动过程中最低点的垂直距离h。
3.分别记录上述四种情况下摆球通过最低点时的速度v。
【实验数据记录与分析】参考实验数据及处理结果见表.表m=,g=s ,d=结论:在误差允许的范围内机械能守恒。
【问题与讨论】1、小球摆动过程中的能量是如何转化的答:小球在向下摆动的过程中重能势能转化为动能,向上摆动的过程中动能转化为重力势能。
2、小球摆动过程中机械能会不会变化答:小球摆动过程中机械能保持不变。
3、小球所受到各个力做功的情况如何答:小球在向下摆动的过程中重力做正功,在向上摆动的过程中重力做负功,整个过程中拉力不做功。
简谐运动的回复力和能量、单摆【学习目标】1.掌握简谐运动的动力学特征,明确回复力的概念。
2.知道简谐运动是一种没有能量损耗的理想情况。
3.理解简谐运动过程中位移、回复力、加速度、速度、动能、势能的变化情况。
4.知道什么是单摆。
5.理解摆角很小时单摆的振动是简谐运动。
6.知道单摆的周期跟什么因素有关,了解单摆的周期公式,并能用来进行有关的计算。
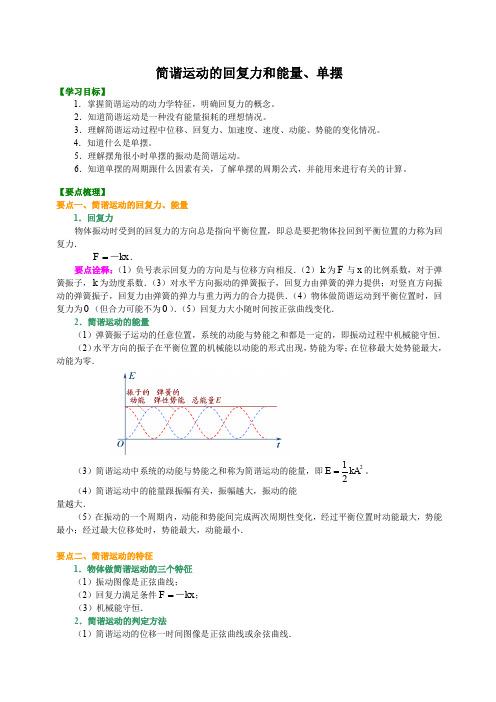
【要点梳理】要点一、简谐运动的回复力、能量 1.回复力物体振动时受到的回复力的方向总是指向平衡位置,即总是要把物体拉回到平衡位置的力称为回复力.F kx =-.要点诠释:(1)负号表示回复力的方向是与位移方向相反.(2)k 为F 与x 的比例系数,对于弹簧振子,k 为劲度系数.(3)对水平方向振动的弹簧振子,回复力由弹簧的弹力提供;对竖直方向振动的弹簧振子,回复力由弹簧的弹力与重力两力的合力提供.(4)物体做简谐运动到平衡位置时,回复力为0(但合力可能不为0).(5)回复力大小随时间按正弦曲线变化.2.简谐运动的能量(1)弹簧振子运动的任意位置,系统的动能与势能之和都是一定的,即振动过程中机械能守恒. (2)水平方向的振子在平衡位置的机械能以动能的形式出现,势能为零;在位移最大处势能最大,动能为零.(3)简谐运动中系统的动能与势能之和称为简谐运动的能量,即212E kA =。
(4)简谐运动中的能量跟振幅有关,振幅越大,振动的能 量越大.(5)在振动的一个周期内,动能和势能间完成两次周期性变化,经过平衡位置时动能最大,势能最小;经过最大位移处时,势能最大,动能最小.要点二、简谐运动的特征1.物体做简谐运动的三个特征 (1)振动图像是正弦曲线;(2)回复力满足条件F kx =-;(3)机械能守恒.2.简谐运动的判定方法(1)简谐运动的位移一时间图像是正弦曲线或余弦曲线.(2)故简谐运动的物体所受的力满足F kx=-,即回复力F与位移x成正比且方向总相反.(3)用F kx=-判定振动是否是简谐运动的步骤:①对振动物体进行受力分析;②沿振动方向对力进行合成与分解;③找出回复力,判断是否符合F kx=-.要点三、简谐运动的运动特点1.简谐运动的加速度分析方法简谐运动是一种变加速的往复运动,由ka xm=-知其加速度周期性变化,“-”表示加速度的方向与振动位移x的方向相反,即总是指向平衡位置,a的大小跟x成正比.2.简谐运动的运动特点物体位置位移x回复力F加速度a速度v势能pE动能kE方向大小方向大小方向大小方向大小平衡位置O 零零零mv零kmE最大位移处M 指向MA指向OkA指向OkAm零pmE零O M →指向MA→零指向OkA→零指向OkAm→零指向Mmv→零pmE→零kmE→零M O→指向MA→零指向OkA→零指向OkAm→零指向Omv→零pmE→零kmE→零通过上表不难看出:位移、回复力、加速度三者同步变化,与速度的变化相反.通过上表可看出两个转折点:平衡位置O点是位移方向、加速度方向和回复力方向变化的转折点;最大位移处是速度方向变化的转折点.还可以比较出两个过程的不同特点,即向平衡位置O靠近的过程及远离平衡位置O的过程的不同特点:靠近O点时速度大小变大,远离O点时位移、加速度和回复力大小变大3.弹簧振子在光滑斜面上的振动光滑斜面上的小球连在弹簧上,把原来静止的小球沿斜面拉下一段距离后释放,小球的运动是简谐运动.分析如下:如图所示,小球静止时弹簧的伸长量为0sin mg x kθ=, 往下拉后弹簧相对于静止位置伸长x 时,物体所受回复力()0sin F k x x mg kx θ=++=--.由此可判定物体是做简谐运动的.要点四、单摆 1.单摆单摆指在一条不可伸长的,又没有质量的线的下端系一质点所形成的装置.单摆是实际摆的理想化的物理模型.实际摆可视为单摆的条件:细线的质量与小球相比可以忽略,球的直径与线的长度相比也可以忽略.一个很轻的细线系着一个有质量的质点,这个模型叫做单摆.在实验室里,如果悬挂物体的细线的伸缩和质量可以忽略,细线的长度比物体的直径大得多,这样的装置就叫做单摆. 单摆做简谐运动的条件:小球摆到最高点时,细线与竖直方向的夹角叫偏角.偏角很小时,单摆做简谐运动. 2.单摆做简谐运动的回复力单摆做简谐运动的回复力是由重力mg 沿圆弧切线的分力 sin F mg θ=切提供(不要误认为是摆球所受的合外力).当θ很小时,圆弧s 可以近似地看成直线x ,sin xlθ=.切线的分力F 可以近似地看做沿这条直线作用,这时可以证明mgF x kx l=-=-.可见,在偏角很小的情况下,单摆振动时回复力跟位移成正比而方向相反,是简谐运动. 3.单摆的周期公式荷兰物理学家惠更斯发现在偏角很小的情况下,单摆的周期跟摆长的平方根成正比,跟重力加速度的平方根成反比,而跟摆球的质量和振幅无关,即 2l T gπ= 式中l 为悬点到摆球球心间的距离,g 为当地的重力加速度.(1)单摆的等时性:往振幅较小时,单摆的周期与单摆的振幅尤天,单摆的这种性质叫单摆的等时性.(2)单摆的周期公式:由简谐运动的周期公式2m T kπ=, 对于单摆mgk l=, 所以2l T gπ=. 周期为2 s 的单摆,叫做秒摆,由周期公式2l T gπ= 得秒摆的摆长222229.8m 1m 44 3.14T g l π⋅⨯==≈⨯. 4.单摆的应用(1)计时器:利用单摆周期与振幅无关的等时性,制成计时仪器,如摆钟等.由单摆周期公式知道,调节单摆摆长即可调节钟表快慢.(2)测定重力加速度:把单摆周期公式变形,得224/g l T π=.由此可知,只要测出单摆的摆长和振动周期,就可以测出当地的重力加速度g 。
高中物理机械能守恒定律典例解题技巧机械能守恒也适用于悬挂在固定点上的物体的运动。
在这种情况下,物体只受到重力和张力的作用。
由于张力垂直于物体的运动方向,不做功。
因此,只有重力做功,物体的机械能守恒。
例:一个长为L的简单重锤摆,以初速度v在最高点释放,求当它通过最低点时的速度大小。
分析:在摆动过程中,重力做功,而摩擦力和空气阻力不起作用,因此机械能守恒。
以最低点为零势能,最高点为最大势能,可得:mgh = 1/2mv^2由于在最高点v=0,因此mgh = 1/2mv^2 = 1/2m(2gL)^2解出v,得:v = √(2gL(1-cosθ))其中θ为最低点到最高点的夹角。
小球在绕固定悬点摆动时,受到重力和拉力的作用。
由于悬线的拉力始终沿法线方向,垂直于物体运动的速度方向,因此不对运动物体做功。
因此,只有重力做功,物体的机械能守恒。
例如,小球的质量为m,悬线的长度为L。
将小球拉开,使悬线与竖直方向的夹角为θ,然后从静止释放,求小球运动到最低点时小球对悬线的拉力。
分析:物体在运动过程中受到重力和悬线拉力的作用,悬线的拉力对物体不做功,因此只有重力做功,物体的机械能守恒。
选择物体运动的最低点作为重力势能的零势参考点,使物体开始运动时的机械能等于到达最低点时的机械能。
mgL(1-cosθ) = 1/2mv^2因此,v^2 = 2gL(1-cosθ)根据向心力的公式,可以得到:T - mg = mv^2/L因此,T = 3mg - 2mgcosθ在解决这类问题时,通常选取物体运动的最低点作为重力势能的零势参考点,同时注意向心力公式的使用。
题:1.三个质量相同的小球悬挂在三根长度不等的细线上,把悬线拉至水平位置后轻轻释放小球,已知线长Lc。
Lb。
La,则悬线摆至竖直位置时,细线中张力大小的关系是 Tc。
Tb。
Ta。
2.一根长为l的轻质杆,下端固定一质量为m的小球,欲使它以上端o为转轴刚好能在竖直平面内作圆周运动。
课程篇械能守恒在整个中学物理教学中非常重要,它给学生一个新的视角,用守恒的思想去解决动力学问题,在整个自然科学领域,守恒是一种非常重要的研究问题的方法,能量守恒、电荷守恒、质量守恒、机械能守恒、动量守恒,都是各学科领域中非常重要的定律,中学物理是运用打点计时器结合自由落体运动来验证机械能守恒的,实验简单易行,但有如下不足:(1)误差相对较大只能精略大致进行验证;(2)区限性较大,自由落体是直线运动,直线运动中机械能守恒,曲线运动中守恒吗?(3)不便于不学生课外自主探究。
该实验受打点计时器的限制,学生课外要想去验证不易实现,更谈不上自主探究以及素质的提升。
本文介绍借助单摆和平抛运动动去验证机械能守恒。
一、机械能守恒简介1.机械能守恒的条件:只有重力或者是弹力做功。
2.机械能守恒的三个表达式(没有弹性势能参与时)(1)状态表达式:12mv12+mgh1=12mv22+mgh2(2)能量变化表达式:mgh1-mgh2=12mv22-12mv12(3)对象表达式:E1′-E1=E2-E2′假设系统内有两个对象,则对象1机械能的减小量等于对象2机械能的增加量。
二、用单摆验证机械能守恒实验1.实验原理mgh1=12mv B2h2=12gt2x2=v B t2.实验简介首先接通电源等B处的电热丝达到一定温度后,将单摆从最点B拉到某一位置A处,从静止开始释放小球,单摆从A向B运动,当运动到B点时悬挂小球的细线在此处被通电的电热丝烧断,水平向外飞出做平抛运动,落到铺有复写纸的地面上C点,然后分别测量出小球从A运动到C的过程中下落的高度h1、小球做平抛运动的高度h2,和远度x2。
重重复刚才步骤,多做几次,并分别记录数据。
3.实验数据记录与处理(1)下落高度的测量得用刻度尺测量出小从A点运动到B点是下落的高度h1。
(2)速度的测量小球运动到最低B点时线刚好被烧断,小球从B点开始做平抛运动,在地上铺上白纸与复写纸,记录下小球落到地上时的置C,然后测用重垂线找到小球在B点是在地面的投影点D,并利用刻度尺测量出B点距地面的高度h2与B点离C点距离x2,为减小实验的误差应多次实验反复测量h2与x2的值,并求出平均值这样可以减少偶然误差,提高实验准确程度,然后运动平抛运动的规律可知小球运动到B点时的瞬时速度为:h2=12gt2(1)x2=v B t(2)由(1)(2)式可知小球运动到B点时的瞬时速度为:v B=x2g2h2√4.实验结果由实验原理化简可得:h1=0.25x22/h2,通过测量h1,x2,h2,代入上式,是否近似等,如果相等机械能守恒,则验证完成。
万有引力问题中的机械能守恒问题新解如果引力场不是保守力场,那么无需多久,两个围绕质心运行的双星必然相撞,宇宙中就不会存在着恒久运行的双星.天文观测的结果表明,宇宙中双星的运行十分正常,这一现象足以说明,引力场是一个保守力场.由于万有引力是保守力,因此当物体运动的轨迹是曲线时,只要非保守力做功为0,结论仍成立,即机械能守恒定律成立.下面我们用数学推导一下:一、 以其中的一个星体为参照系根据经典力学星体的运行问题应该按照两体问题解决,质量应该用它们的折合质量(约化质量)代替.如果星体B 绕星体A 运行的轨道是严格的椭圆,以星体A 为参照系机械能是守恒的,下面推导一下:在极坐标中r v r =………(1),θθ r v =………(2),其中r v 、θv 分别表示径向速度和横向速度.由于两个星体都做加速运动,因此星体B 应当用它的折合质量(约化质量) .由椭圆方程θc o s 1e ep r -=得:θc o s 1e r ep-=,两边对时间求导,有:θθ s i n 2e r r ep =-整理可得:θθ sin 2p r r-= (3)星体B 运动的速度为:22v r r =======即:22cos 21e e ep r v +-=θθ …………………………………………(4),这个结果中只有θ是变量,其它都是常数,特别是θ2r 为常数.这表明:πθ≤≤0时,v 是增函数,v 随θ的减小而增大;πθπ2≤≤时,v 是减函数,v 随θ的增大而减小.实际上,由于θcos 1e ep r -=,所以上面的结果也可以用r 来说明:πθ≤≤0时,v 是增函数,v 随r 的减小而增大;πθπ2≤≤时,v 是减函数,v 随r 的增大而减小.由动能的表达式及(4)式可知:()22212cos 2()k mM e e r E M m ep θθ-+⎛⎫=⋅ ⎪+⎝⎭…………………(5) 椭圆面积:ab S π=…………(6),其中a 、b 分别表示椭圆的长轴和短轴,对椭圆方程θcos 1e pe r -=来说,当0=θ时,e per -=11…………(7),当πθ=时,e per +=12 (8)如图1所示,1r 用红色的线段来表示,2r 用绿色的线段来表示.可知:a r r 221=+ (9)由(7)(8)(9)可得:21e epa -=…………………(10),()22222211e epe a ae a c a b -=-=-=-= (11)将(10)(11)式代入(6)式可知:()2322222111e p e e ep e ep S -==-⋅-⋅=ππ (12)掠面速度()232222121e T p e T S r -==πθ ,从而有:()23222212eT p e r -=πθ (13)将(13)式代入(5)可知:()()()()2224432232222223212cos 142()112cos 412()12cos 42()k mM e e e p E M m ep T e ep mM e e e ep M m T mM e e a ep M m Tθπθπθπ-+⎛⎫=⋅⋅ ⎪+⎝⎭-⎛⎫⎪-+-⎝⎭=⋅⋅+-+=⋅⋅+上式中最后一个因子23T a 出现在Kepler 第三定律中,我们知道,它是一个常数(高斯常数应修正为G(M+m)),在这里我们用k 来表示这个值.有:()2212c o s 42()k m Me e k E e p m M θπ-+=⋅+…………………(14),另外,由k GM 24π=,代入(14)式有:()2212cos 2()k m e e GM E ep M m θ-+=⋅+……………………(15) 我们采用传统的方法规定零势能点,即规定无穷远处势能为零.有:l222()()p rGM m GM mE dr r m M r M m ∞=-==-++⎰……………………(16),将θcos 1e epr -=代入上式可得:()21cos ()p GM m e E ep m M θ-=-+………………(17),由(14)(17)两式可得星体B 运动中的机械能总量.()()()222222222212cos 1cos 2()()12cos 22cos 2()12()12()2()k p mM e e GM m e G E E E ep M m ep m M GM m e e e ep M m GM me ep M m GM m e m M ep GM m a M m θθθθ-+⎡⎤-=+=⋅+-⎢⎥++⎣⎦⎡⎤=-+-+⎣⎦+=-+-=-⋅+=-+即:22()GM mE a m M =-+……………(18).这个结果说明,星体B 运动过程中机械能守恒.二、以相对于一个星体匀速运动的宇宙飞船为参照系。
单摆1.关于单摆,下列说法中正确的是( )A.摆球运动的回复力是它受到的合力B.摆球在运动过程中经过轨迹上的同一点时,加速度是不变的C.摆球在运动过程中加速度的方向始终指向平衡位置D.摆球经过平衡位置时,加速度为零解析:选B 摆球的回复力为重力沿轨迹切线方向的分力,A错误;摆球在运动过程中经过轨迹上同一点时,受力不变,故加速度是不变的,B正确;摆球在运动过程中,回复力产生的加速度方向始终指向平衡位置,而向心加速度指向悬点,合成后方向在改变,故C 错误;摆球经过平衡位置时具有向心加速度,故加速度不为零,D错误。
2.在盛沙的漏斗下方放一木板,让漏斗摇摆起来,假设漏斗中细沙匀速流出,经过一段时间后,视察木板上沙子的积累状况,不考虑空气阻力,则沙堆的剖面应是下图中的( )解析:选B 不考虑空气阻力,漏斗在从最左端向最右端运动和从最右端向最左端运动时,到达中间时运动速度最快,漏到木板上的细沙最少,从中间到两端漏斗运动的速度渐渐变慢,故漏到木板上的细沙越来越多,B正确。
3.(2024·湖南八校联考)把在北京调准的摆钟由北京移到赤道,则摆钟( )A.变慢了,要使它复原精确,应当增加摆长B.变慢了,要使它复原精确,应当减短摆长C.变快了,要使它复原精确,应当增加摆长D.变快了,要使它复原精确,应当减短摆长解析:选 B 把调准的摆钟由北京移至赤道,重力加速度变小,依据周期公式T=2πlg,则周期变长,钟变慢了,要使它复原精确,应当使T减小,即减短摆长l。
故A、C、D错误,B正确。
4.(多选)如图所示,同一地点的A、B两个单摆做简谐运动的图像中,实线表示A的运动图像,虚线表示B的运动图像。
以下关于这两个单摆的推断中正确的是( )A .这两个单摆的摆球质量肯定相等B .这两个单摆的摆长肯定不同C .这两个单摆的最大摆角肯定相同D .这两个单摆的振幅肯定相同解析:选BD 从题图可知:两单摆的振幅相等,周期不等,所以两单摆的摆长肯定不同,故B 、D 正确,C 错误;单摆的周期与质量无关,故A 错误。
自然摆动的单摆机械能守恒问题新解摘 要:重新解答了自然摆动的单摆机械能守恒问题,得出了在地面上和相对于地面做匀速运动的小车上,单摆的机械能都守恒的新结论.关键词:单摆;动能;势能;机械能守恒中图分类号:O 313.1 文献标识码:A在中学物理学和大学力学中,单摆摆动过程中的摆锤(可以视为质点,下同)的运动可以利用重力机械能守恒定律来研究,可是参考文献[1]- [5]得出在单摆问题中机械能守恒定律不满足伽利略变换,本文就单摆在摆动过程中的机械能守恒问题作进一步研究.将摆锤质量为m ,摆线长度为L 的单摆挂在与地面相固连的摆架上,将摆锤从单摆静止时的竖直下垂位置拉至摆角为θ0(θ0∈[00,900]时自然放手,在忽略各种阻尼时,单摆就做自然摆动,θ0为最大摆角.有一小车相对于光滑地面以恒速u 沿单摆摆动方向向右运动.试问在地面(地球质量视为充分大,故稳定地保持为惯性系).和小车上观察,单摆的机械能是否守恒,并说明理由.解:在地面上观察时,以单摆的悬挂点o 为极点,单摆静止时与摆线重合的射线oy 为极轴,从o 到摆锤的矢量r 为极径,极轴和极径的夹角θ为极角建立平面极坐标系如图1所示.设在地面上观察时,单摆在t=0时刻从最大摆角θ0(θ0∈(00,900])开始摆动,t 时刻的摆角、速度大小、切向加速度大小、动能、势能、机械能分别为:θ,v ,a ,E k (t ),E p (t ),E (t );在小车上观察时,单摆在t 时刻的摆角、速度大小、动能、势能、机械能分别为:θ1,v 1,E 1k (t ),E 1p (t ),E 1(t );在地面上和小车上观察时,都设摆锤的最高点为零势点.则有:v =ts d d =t L d )]([d 0θθ-=t θL d d -. d t =vθL d -(0≤θ≤θ0). mg sin θ=ma ,g sin θ=a =t d d v =θL d d -v ⋅t θL d d -=θL d d -v ⋅v ,v d v =-gL sin θd θ, ⎰v v 0d v =-gL ⎰θθ0sin θd θ,21v 2=gL (cos θ-cos θ0).v =)cos (cos 20θθgL -. t θd d =L -v =-L 1)cos (cos 20θθgL -=-)cos (cos 20θθL g -=-0cos 2cos 2θL g θLg -<0, 所以对于一个确定的单摆而言,只要初始状态确定,单摆的摆角是时间t 的单值函数,因此我们只需证明任意摆角的机械能相等即可,在本题中是减函数.图1 自然摆动单摆机械能守恒问题新解E k (t )= E k ′(θ)=21m v 2=mgL (cos θ-cos θ0); E P (t )= E P ′(θ)= -0mgLsin θθ⎰θd θ=- m gL ⎰θθ0sin θd θ= -mgL (cos θ-cos θ0)E (t )=E k (t )+E P (t )= E k ′(θ)+E P ′(θ)=mgL (cos θ-cos θ0) -mgL (cos θ-cos θ0)=0.所以在地面上观察时单摆的机械能守恒,守恒值为0.直觉判断:因为摆锤在最高点以匀速度u 相对于小车沿x 轴负向运动,我们规定此时的势能为0,所以在小车上观察时,单摆的机械能比在在地面上观察时增加21m (-u )2=21mu 2,所以在小车上观察时,单摆的机械能为: E 1(θ)=E (θ)+21mu 2=0+21mu 2=21mu 2(常数). 所以,在小车上观察时,单摆的机械能守恒,守恒值为21mu 2. 数学推导:在地面系——设初相为0,v=ωR,x=Rcos ωty= R sin ωt 将运动方程作伽利略变换,写出小车系运动方程:x 1=x-ut=Rcos ωt-uty 1= y=R sin ωt因此在小车系,轨迹仍然是一个圆,圆心做匀速直线运动,向心力与弧线垂直.在小车上观察(即以小车为静止系)时有:θ1v =v -u cos θ,21θv = (v -u cos θ)2=2v +2u 2cos θ-2v u cos θ;r 1v =-u sin θ,21r v =2u 2sin θ.21v =21θv +21r v =2v +2u 2cos θ-2v u cos θ+2u 2sin θ=2v +2u +2u ⋅v cos θ= 2gL (cos θ-cos θ0)+u 2+2u ⋅)cos (cos 20θθgL -cos θ.E 1k (t )= E 1k ′(θ)=21m 21v =mgL (cos θ-cos θ0)+21mu 2+mu ⋅)cos (cos 20θθgL -cos θ. v =ts d d =t L d )]([d 0θθ-=t θL d d -,d t =v θL d -(0≤θ≤θ0).a 1=a =g sin θ.ma 1=ma =mg sin θ.0-E 1p (t )= -E 1p ′(θ)= ⎰θθma 01d s +⎰t u ma 01cos θd t +⎰tm 0L 2v u sin θd t = ⎰θθθmg 0sin (-L d θ)+mu ⋅⎰⎪⎪⎭⎫ ⎝⎛+tθL θθg 02sin cos sin v v θL d -=-mgL ⎰θθθ0sin d θ+ muL ⋅⎰⎪⎭⎫ ⎝⎛-+θθL θθgL θg 0)cos (cos 2cos 0v θdcos = mgL cos θθθ0+mugL ⋅⎰-+θθθθθ0)cos 2cos 2(cos 0)cos (cos 2cos d 0θ-θgL θ=mgL (cos θ-cos θ0)+gL mugL 23 ⎰--+-θθθθθθθθ00000cos cos cos 32cos cos cos dcos θ= mgL (cos θ-cos θ0)+gL mugL 23⋅32(cos θ-cos θ023) +gLmugL 2⋅2 (cos θ-cos θ021)cos θ0= mgL (cos θ-cos θ0)+mu ⋅gL 2(cos θ-cos θ023) +mu ⋅gL 2(cos θ-cos θ021)cos θ0=mgL (cos θ-cos θ0)+mu ⋅gL 20cos cos θθ-(cos θ-cos θ0+cos θ0)=mgL (cos θ-cos θ0)+mu ⋅)cos (cos 20θθgL -cos θ.E 1p (t )= E 1p ′(θ)=-mgL (cos θ-cos θ0)-mu ⋅)cos (cos 20θθgL -cos θ.E 1(t )=E 1k (t )+E 1p (t )= E 1k ′(θ)+E 1p ′(θ)=mgL (cos θ-cos θ0)+21mu 2+mu ⋅)cos (cos 20θθgL -cos θ+ -mgL (cos θ-cos θ0)-mu ⋅)cos (cos 20θθgL -cos θ=21m 2u (常数). 所以在小车上观察时,单摆的机械能守恒,守恒值为21m 2u . 当u =0时两个坐标系重合,守恒值相等,符合玻尔的对应原理.说明:文献[1]和[2]都认为拉力F 对于小球做功,造成机械能不守恒,上面的推导证明文献[1]和[2]的观点是错误的.通过本文我们也可以看出在单摆问题中绳子的约束力是一个保守力,可以改变动能和势能,但是不改变系统的机械能,与直接计算重力机械能得出的结果一致.定理:质点做圆周运动的约束力是一个保守力,可以改变动能和势能,但是不改变质点的机械能.在小车系摆锤在最低点的动能和势能分别为: E 1k (t )= E 1k ′(θ) =21m (v +u )2=21m (v 2+u 2+⋅2u v )=21m v 2+21mu 2+mu v = mgL (1-cos θ0)+21mu 2+mu ⋅)cos 1(20θgL -. E 1p (t )=-mu ⋅)cos 1(20θgL -.E1p (t )=E 1p ′(θ)= -mgL (cos 0-cos θ0)-mu 0=-mgL (1-cos θ0)-mu ⋅与地面系的结果不同,当u =0时与地面系一致,符合玻尔的对应原理.E 1(t )=E 1k (t )+E 1p (t )= E 1k ′(θ)+E 1p ′(θ)=mgL (1-cos θ0)+21mu 2+mu ⋅)cos 1(20θgL --mgL (1-cos θ0)- mu ⋅)cos 1(20θgL -= 21mu 2(常数). 因此摆锤在最低点的势能不再相等,因为势能的零点发生了变化.在上面的单摆问题中势能只能说是与重力有关的势能,不是严格意义上的重力势能,因为质点受到的合力不等于重力.在本题中摆线的力是一个保守力,也是一个弹力,只不过认为摆线的劲度系数为无穷大,忽略形变,因此本题是两个保守力共同作用下的机械能守恒问题.当观察者相对于单摆静止时,利用重力机械能守恒定律得出的结果等效;当观察者相对于单摆的悬挂点匀速运动时,直接利用重力机械能守恒定律是错误的,应该利用保守力所做的功等于势能的减少来计算.在小车系看来,摆线的作用力并不始终与位移垂直,摆线的作用力也做功,改变了摆锤的动能,不过也改变了摆锤的势能,不改变摆锤的机械能,机械能守恒定律中的保守力应该是保守力的合力,本题中如果按照重力机械能计算显然不满足力学相对性原理,参见文献[1]- [6].参考文献:[1]蔡伯濂.关于力学相对性原理与机械能守恒综述[J ].大学物理,1994,(13)1:20—22.[2]何红雨.机械能守恒定律与惯性参照系的选择[J ].广西物理,1997,(18)3:27-29.[3]金若兴. 机械能守恒定律的条件. 物理教学,1985年1月[4]熊秉衡. 在不同惯性系中的机械能守恒定律,物理(原名《物理通报》),1964年6月[5]施肖铮. 在不同惯性系中的机械能守恒定律,常州信息职业学院学报,2002年12月,第1卷第2期[6]熊秉衡. “在不同惯性系中的机械能守恒定律”一文的更正与补充,物理(原名《物理通报》),1965年3月New interpretation of mechanical energy conservation of a natural swinging single pendulumAbstract :It refurbished the issue of mechanical energy conservation of a natural swinging single pendulum, which straightforwardly led to conclusion, no matter we take reference frame of the earth itself or the cart moving in uniform speed to the earth, the mechanical energy of a natural swinging single pendulum is always conservative.Key words :the single pendulum ;kinetic energy ;potential energy ;conservation of mechanical energy。