高通平台校准原理介绍
- 格式:pdf
- 大小:8.42 MB
- 文档页数:60
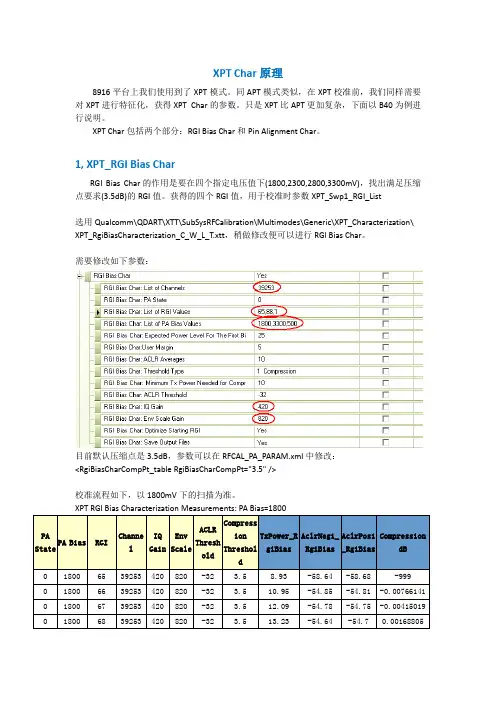
XPT Char原理8916平台上我们使用到了XPT模式。
同APT模式类似,在XPT校准前,我们同样需要对XPT进行特征化,获得XPT Char的参数。
只是XPT比APT更加复杂,下面以B40为例进行说明。
XPT Char包括两个部分:RGI Bias Char和Pin Alignment Char。
1, XPT_RGI Bias CharRGI Bias Char的作用是要在四个指定电压值下(1800,2300,2800,3300mV),找出满足压缩点要求(3.5dB)的RGI值。
获得的四个RGI值,用于校准时参数XPT_Swp1_RGI_List选用Qualcomm\QDART\XTT\SubSysRFCalibration\Multimodes\Generic\XPT_Characterization\ XPT_RgiBiasCharacterization_C_W_L_T.xtt,稍做修改便可以进行RGI Bias Char。
需要修改如下参数:目前默认压缩点是3.5dB,参数可以在RFCAL_PA_PARAM.xml中修改:<RgiBiasCharCompPt_table RgiBiasCharCompPt="3.5" />校准流程如下,以1800mV下的扫描为准。
可以看到,在1800mV下满足3.5dB压缩点时的RGI是80.关于如何计算出压缩点,case上说算法没法公开,we compute the compression point through IQ capture process, the detail of the algorithm is confidential, but you can take a look at my attachment for a brief understanding of compression point.同样的方法,完成在2300mV,2800mV和3300mV下的扫描,获得满足压缩点要求的RGI 值。
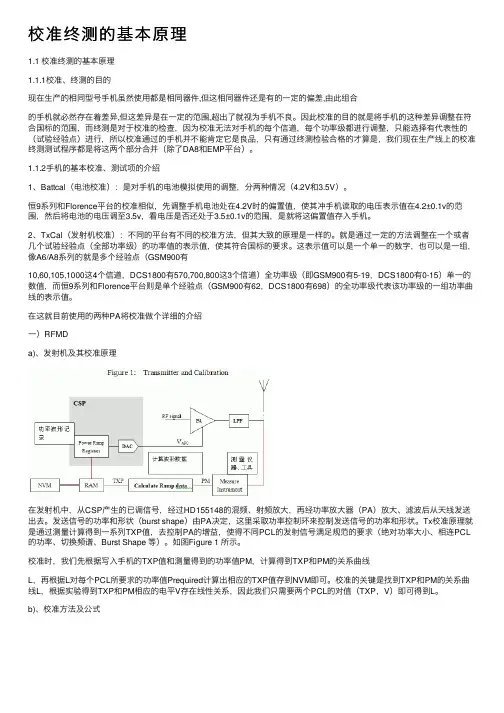
校准终测的基本原理1.1 校准终测的基本原理1.1.1校准、终测的⽬的现在⽣产的相同型号⼿机虽然使⽤都是相同器件,但这相同器件还是有的⼀定的偏差,由此组合的⼿机就必然存在着差异,但这差异是在⼀定的范围,超出了就视为⼿机不良。
因此校准的⽬的就是将⼿机的这种差异调整在符合国标的范围,⽽终测是对于校准的检查,因为校准⽆法对⼿机的每个信道,每个功率级都进⾏调整,只能选择有代表性的(试验经验点)进⾏,所以校准通过的⼿机并不能肯定它是良品,只有通过终测检验合格的才算是,我们现在⽣产线上的校准终测测试程序都是将这两个部分合并(除了DA8和EMP平台)。
1.1.2⼿机的基本校准、测试项的介绍1、Battcal(电池校准):是对⼿机的电池模拟使⽤的调整,分两种情况(4.2V和3.5V)。
恒9系列和Florence平台的校准相似,先调整⼿机电池处在4.2V时的偏置值,使其冲⼿机读取的电压表⽰值在4.2±0.1v的范围,然后将电池的电压调⾄3.5v,看电压是否还处于3.5±0.1v的范围,是就将这偏置值存⼊⼿机。
2、TxCal(发射机校准):不同的平台有不同的校准⽅法,但其⼤致的原理是⼀样的。
就是通过⼀定的⽅法调整在⼀个或者⼏个试验经验点(全部功率级)的功率值的表⽰值,使其符合国标的要求。
这表⽰值可以是⼀个单⼀的数字,也可以是⼀组,像A6/A8系列的就是多个经验点(GSM900有10,60,105,1000这4个信道,DCS1800有570,700,800这3个信道)全功率级(即GSM900有5-19,DCS1800有0-15)单⼀的数值,⽽恒9系列和Florence平台则是单个经验点(GSM900有62,DCS1800有698)的全功率级代表该功率级的⼀组功率曲线的表⽰值。
在这就⽬前使⽤的两种PA将校准做个详细的介绍⼀)RFMDa)、发射机及其校准原理在发射机中,从CSP产⽣的已调信号,经过HD155148的混频、射频放⼤,再经功率放⼤器(PA)放⼤、滤波后从天线发送出去。
高通平台摄像头调试分享6 v1 O7 w6 c& A! q 之前一段时间有幸在高通android平台上调试2款camera sensor,一款是OV的5M YUV sensor,支持jpeg out,同时也支持AF,调试比较比较简单,因为别的项目已经在使用了,只是把相关的驱动移植过来就好;另一款是Samsung的一款比较新的3M YUV FF sensor,在最新项目中要使用的,本文以调试该sensor为例,从底层驱动的角度分享一下高通android平台下调试camera的经验,而对于高通平台camera部分的架构以及原理不做过多的介绍。
, A) j* ^+ S- {7 S: C+ G* D/ l0 ~+ E( W, }% V( S! X一、准备工作从项目中看,在硬件(板子)ready前,软件部分是要准备好的。
单独从底层驱动来看,软件部分可以分为2个部分,一个是高通平台相关的,再一个就是sensor部分的,通常的做法就是把sensor相关的设定移植到高通平台的框架之中。
这样就需要先拿到sensor 的spec以及厂商提供的sensor register setting file。
Spec的用途是清楚高通平台和sensor通讯(读写寄存器)的时序以及相关参数设定;而厂商提供的setting file则是在使用camera各个功能(preview、snapshot...)时候需要写入到sensor中的.; X5 r( M0 m: y% r, i' P' |本项目中,高通平台为MSM7X27,camera为Samsung 5CA。
从spec中知道,该sensor的I2C ID为0x78,I2C的通信采用双字节方式,另外也弄清楚了读写sensor 寄存器的规则,从调试角度看这些基本上够用了。
另外厂商提供的setting file,其实就是寄存器列表,告诉我们再什么时候将哪些寄存器写入什么值,通常是一个寄存器地址再加上一个寄存器的值,不过Samsung提供的是PC上调试使用的文本,需要自己转换成c语言中的二维数组。

MTK 平台校准原理一.AFC(自动频率控制)校准校准目的:校准AFC DAC 值与TCVCXO 输出频率(26MHz)之间的对应关系,使得测试接收信号的频率误差在允许范围之内。
校准步骤:1. 控制综测仪Agilent 8960 或者R&S CMU200 设定在BCCH(广播控制信道)中的某一个信道arfcn_C0_GSM(可以为1-124 中的一个,由板测软件初始设定),并设定发射功率为PDL(dBm)(由板测软件初始设定);2. 设定手机中频部分的接收增益为:-35-PDL(dB),AFC_DAC值为DAC1(由板测软件初始设定),软件发出AFC测试请求,在arfcn_C0_GSM信道上得到N_AFC个采样值;3. 等待CPU计算出接收I/Q信号的频率平均误差:△f1;4. 再设定手机中频部分的接收增益为:-35-PDL(dB),AFC_DAC值为DAC2(由板测软件初始设定),这里DAC2>DAC1,软件发出AFC测试请求,在测量信道上的到N_AFC个采样值;5. 等待CPU计算出接收I/Q信号的频率平均误差:△f2;6. 计算AFC DAC 斜率为:Slope=(△f1-△f2)/(DAC2-DAC1);由得到的Slope 值及DAC1 再计算得到初始ADC 值:INIT_AFC_DAC 为:Use Default Value=△f1/ Slope+DAC1;注:arfcn_C0_GSM、PDL、DAC1、DAC2、N_AFC均在板测配置文件meta_6218B.CFG中初始设定,如下:arfcn_C0_GSM = 70;定义用于AFC 测试的信道为70;P_DL = -60;定义综测仪发射功率为-60dBm;N_AFC = 15;定义AFC 测量此时为15 次;DAC1=4000;定义DAC1 初始值为4000;DAC1=5000;定义DAC2 初始值为5000;判断该项板测结果是否通过,即看得到测量结果值:Slope、INIT_AFC_DAC 是否在上下限值之内,该限值亦在板测配置文件meta_6218B.CFG 中设定,如下:[AFC table] //AFC DAC 参数表MAX_INIT_AFC_DAC = 7000MIN_INIT_AFC_DAC = 2000;(即定义INIT_AFC_DAC最大不超过7000,最小不小于2000)MAX_AFC_SLOPE = 4.0MIN_AFC_SLOPE =2.3;(即定义Slope 值最大不超过4.0,最小不小于2.3)下图为测量频率平均误差对DAC 值曲线,呈线性关系,直线的斜率为Slope。
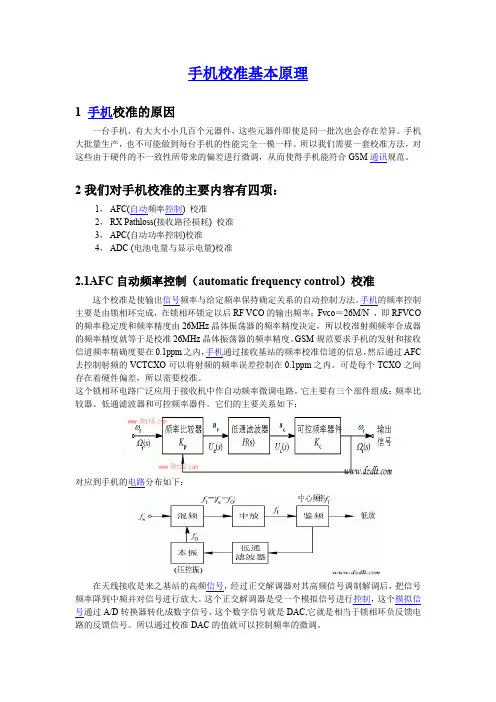
手机校准基本原理1 手机校准的原因一台手机,有大大小小几百个元器件,这些元器件即使是同一批次也会存在差异。
手机大批量生产,也不可能做到每台手机的性能完全一模一样。
所以我们需要一套校准方法,对这些由于硬件的不一致性所带来的偏差进行微调,从而使得手机能符合GSM通讯规范。
2我们对手机校准的主要内容有四项:1,AFC(自动频率控制) 校准2,RX Pathloss(接收路径损耗) 校准3,APC(自动功率控制)校准4,ADC (电池电量与显示电量)校准2.1AFC自动频率控制(automatic frequency control)校准这个校准是使输出信号频率与给定频率保持确定关系的自动控制方法。
手机的频率控制主要是由锁相环完成,在锁相环锁定以后RF VCO的输出频率:Fvco=26M/N ,即RFVCO 的频率稳定度和频率精度由26MHz晶体振荡器的频率精度决定,所以校准射频频率合成器的频率精度就等于是校准26MHz晶体振荡器的频率精度。
GSM规范要求手机的发射和接收信道频率精确度要在0.1ppm之内,手机通过接收基站的频率校准信道的信息,然后通过AFC 去控制射频的VCTCXO可以将射频的频率误差控制在0.1ppm之内。
可是每个TCXO之间存在着硬件偏差,所以需要校准。
这个锁相环电路广泛应用于接收机中作自动频率微调电路。
它主要有三个部件组成:频率比较器、低通滤波器和可控频率器件。
它们的主要关系如下:对应到手机的电路分布如下:在天线接收是来之基站的高频信号,经过正交解调器对其高频信号调制解调后,把信号频率降到中频并对信号进行放大。
这个正交解调器是受一个模拟信号进行控制,这个模拟信号通过A/D转换器转化成数字信号,这个数字信号就是DAC,它就是相当于锁相环负反馈电路的反馈信号。
所以通过校准DAC的值就可以控制频率的微调。
AFC(自动频率控制)校准的方法,就是通过寻找合适的ADC值,对信号从天线经过解调到中频放大到TRx的过程中的频率差值进行细微的校准。
linux驱动由浅⼊深系列:⾼通sensor架构实例分析之三(adsp上报数据详解、校准流。
本⽂转载⾃:本系列导航:linux驱动由浅⼊深系列:⾼通sensor架构实例分析之⼀(整体概览+AP侧代码分析)linux驱动由浅⼊深系列:⾼通sensor架构实例分析之⼆(adsp驱动代码结构)linux驱动由浅⼊深系列:⾼通sensor架构实例分析之三(adsp上报数据详解、校准流程详解)从adsp获取数据的⽅法分为同步、异步两种⽅式,但⼀般在实际使⽤中使⽤异步⽅式,因为同步获取数据会因外设总线速率低的问题阻塞smgr,降低效率,增加功耗。
Sensor上报数据的⽅式分为如下⼏种sync 同步数据上报,(每次上报⼀个数据)async 异步数据上报,每次请求之后不阻塞,定时查看状态,(收到⼀个数据即上报)self-scheduling 异步数据上报,每次请求之后不阻塞,等待中断或定时查看状态,(收到⼀个数据即上报)FIFO 异步数据上报,每次请求⼀组数据,当传感器数据累积设定⽔位,由⽔位中断触发⼀组数据上报。
S4S(Synchronization for Sensors) ⽤来同步时钟,避免数据遗漏或同⼀数据被取两次在实际使⽤中归纳起来分成3种⽅式:1,(Polling)0x00同步⽅式[sync]:smgr向传感器请求数据,阻塞等待数据到来再返回;异步⽅式[async]:调⽤⼀次get_data后启动timer,等timer中断到达后调⽤sns_ddf_driver_if_s中指定的handle_timer()函数上报⼀组传感器数据。
handle_timer()中⼀般采⽤ddf提供的sns_ddf_smgr_notify_data()函数上报数据。
2,(DRI)0x80⼜称作[self-scheduling]调⽤enable_sched_data()启⽤DRI(DataReadyInterrupt,数据完成中断),等待数据完成中断或启动timer按照set_cycle_time指定的ODR(Output Data Rate,数据输出速率)进⾏数据采集,采集完成后调⽤sns_ddf_driver_if_s中指定的handle_irq()函数上报传感器数据。

gd32 ad校准原理GD32是一种基于ARM Cortex-M系列内核的微控制器系列,而AD则是指模拟数字转换器(Analog-to-Digital Converter)。
AD校准是指对模拟数字转换器进行校准,以确保其准确性和稳定性。
AD校准的原理主要涉及以下几个方面:1. 基准电压源,AD转换器需要一个准确的基准电压源来进行参考,以确保转换结果的准确性。
通常使用稳定的参考电压源,例如内部参考电压源或外部参考电压源。
2. 偏移校准,AD转换器在转换过程中可能存在偏移误差,即输入为零时输出的结果不为零。
为了消除偏移误差,通常会进行偏移校准。
偏移校准的原理是通过测量AD转换器输出的偏移值,并将其作为补偿值进行校准,以使输出结果更准确。
3. 增益校准,AD转换器在不同的输入电压范围内可能存在增益误差,即输入电压与输出结果之间的比例不准确。
为了消除增益误差,通常会进行增益校准。
增益校准的原理是通过测量AD转换器输出的增益值,并将其作为补偿值进行校准,以使输出结果更准确。
4. 线性度校准,AD转换器在转换过程中可能存在非线性误差,即输入电压与输出结果之间的关系不符合理想的线性关系。
为了消除非线性误差,通常会进行线性度校准。
线性度校准的原理是通过测量AD转换器在不同输入电压下的输出结果,并建立校准曲线,以使输出结果更准确。
综上所述,GD32 AD校准的原理主要包括基准电压源的使用、偏移校准、增益校准和线性度校准。
通过这些校准手段,可以提高AD转换器的准确性和稳定性,从而更精确地获取模拟信号的数字表示。
mpu6050 校准原理-回复MPU6050校准原理MPU6050是一款常用的六轴传感器,可以同时测量三轴加速度和三轴陀螺仪的数据。
在使用这款传感器时,往往需要对其进行校准,以保证获取到的数据准确可靠。
本文将会一步一步回答MPU6050的校准原理。
第一步:选择校准方法在开始校准MPU6050之前,我们需要选择适合的校准方法。
目前常用的校准方法有两种:静态校准和动态校准。
静态校准适用于加速度计和陀螺仪的偏置校准,而动态校准则适用于获取传感器的比例因子和旋转矩阵。
对于加速度计的偏置校准,静态校准方法较为简单。
可以将MPU6050放置在一个水平面上,然后读取加速度计的数值。
根据重力加速度的大小和方向,可以计算出传感器的偏置量。
陀螺仪的偏置校准也可以采用类似的方法,通过寻找静止状态下的陀螺仪输出,计算出平均偏置值。
动态校准方法则需要通过一系列的旋转和移动,获取传感器的比例因子和旋转矩阵。
这些动作可以是自由运动或者事先设定的运动序列。
根据传感器输出的数据和实际的运动信息,可以使用最小二乘法或者其他优化算法计算出最佳的比例因子和旋转矩阵。
第二步:准备校准工具进行MPU6050校准时,需要准备一些必要的工具。
首先,需要一个支持MPU6050的开发板或者模块。
其次,需要一台计算机,用于连接MPU6050开发板,并进行数据传输和处理。
再次,需要一根连接线,用于连接MPU6050开发板和计算机。
此外,还需要一些软件工具,如Arduino IDE和相应的MPU6050库。
第三步:连接MPU6050和计算机在进行校准之前,需要将MPU6050连接到计算机上,并确保计算机能够正常识别MPU6050设备。
首先,将MPU6050开发板通过连接线连接到计算机的USB口或者其他适配接口上。
然后,打开Arduino IDE,并导入MPU6050库。
接下来,选择正确的开发板和端口,并编译上传一个简单的程序,用于测试MPU6050是否能够正常工作。