ABB机器人培训教程
- 格式:doc
- 大小:1.59 MB
- 文档页数:68


ABB机器人操作培训资料第一章:ABB机器人概述第二章:ABB机器人的基本操作2.1机器人的启动和关闭启动机器人之前,需要确保机器人的电源已连接,机器人的主电源开关已打开。
然后按下机器人的启动按钮,等待机器人进入工作状态。
关闭机器人时,先按下手持控制器上的停止按钮,然后按下机器人面板上的停止按钮,最后关闭机器人的主电源开关。
2.2机器人的操作模式自动模式是机器人的正常工作模式,可以执行预先编程好的任务。
远程模式是通过计算机或其他远程设备进行控制和监控机器人的工作。
在远程模式下,机器人可以通过网络连接远程监控和操作。
手动模式是用手持控制器直接操控机器人的运动。
在手动模式下,操作人员可以通过手持控制器的按钮和摇杆来控制机器人的动作。
2.3机器人的示教操作机器人的示教操作是为了将人的运动或操作转化为机器人的动作。
ABB机器人有两种示教方式:离线示教和在线示教。
离线示教是在计算机上进行示教操作,然后将示教好的程序上传到机器人。
离线示教可以提高程序的精度和效率,并减少示教的时间。
在线示教是在机器人附近进行示教操作,将操作人员的动作直接传递给机器人。
在线示教方便实时调整机器人的动作,但示教效率较低。
第三章:ABB机器人的安全操作3.1安全保护装置3.2安全操作规程在操作ABB机器人时,操作人员要遵守安全操作规程,如正确佩戴个人防护装备、不超出机器人工作范围、不直接触碰机器人等。
3.3紧急情况的处理在紧急情况下,如机器人发生故障或不正常动作,操作人员要立即按下手持控制器上的急停按钮,并报告给相关人员进行处理。
第四章:ABB机器人的故障排除4.1故障分类4.2故障排除步骤故障排除的步骤包括观察、诊断和修复。
操作人员可以通过观察机器人的状态和报警信息,诊断故障的原因,并进行相应的修复。
第五章:ABB机器人的维护保养5.1机器人的定期维护5.2机器人的保养记录对于每次维护保养,操作人员应该记录相关信息,包括维护日期、维护内容和维护人员等。
ABB机器人学习教程随着工业自动化的快速发展,机器人技术已经成为制造业中不可或缺的一部分。
其中,ABB机器人公司以其广泛的产品线和卓越的技术支持而备受。
本教程旨在帮助初学者了解并掌握ABB机器人的基本知识和操作技巧。
一、ABB机器人概述ABB集团总部位于瑞士苏黎世,是全球电气产品、机器人和自动化系统的领先供应商。
其业务遍布全球,为全球客户提供了一流的解决方案。
在机器人领域,ABB公司拥有超过30年的经验,是无可争议的全球领导者。
二、ABB机器人学习教程1、了解机器人基础知识在开始学习ABB机器人之前,了解一些基础知识是必要的。
您需要了解机器人的定义、分类、组成以及应用领域。
还应熟悉机器人编程语言,如VAL、RAPID等。
2、ABB机器人软件安装与配置要使用ABB机器人,您需要安装相应的软件。
在本教程中,我们将介绍如何安装ABB RAPID编程软件以及如何对机器人进行配置。
在安装过程中,请确保您已经具备足够的计算机硬件配置。
3、掌握基本操作指令了解基本的操作指令是使用ABB机器人的关键。
在本教程中,我们将介绍常用的操作指令,如移动、旋转、速度控制等。
通过学习这些指令,您将能够编写简单的机器人程序。
4、实践编程与调试理论学习固然重要,但实践才是检验真理的唯一标准。
在本教程中,我们将通过案例分析的方式,让您实际操作编程和调试过程。
通过这些案例,您将深入了解ABB机器人的实际应用场景。
5、机器人维护与保养为了确保机器人的稳定运行,定期的维护和保养是必不可少的。
在本章节中,我们将介绍如何对ABB机器人进行日常维护和定期保养,以确保其长期稳定运行。
三、总结通过本教程的学习,大家将全面了解ABB机器人的基本知识和操作技巧。
通过不断实践和积累经验,大家将能够熟练掌握ABB机器人的应用技巧,为大家的职业生涯添砖加瓦。
我们也希望大家能够将本教程分享给更多的人,共同推动工业自动化技术的发展。
ABB工业机器人教程一、介绍ABB工业机器人是一种广泛应用于自动化生产线、装配、焊接、搬运、喷涂等领域的智能设备。
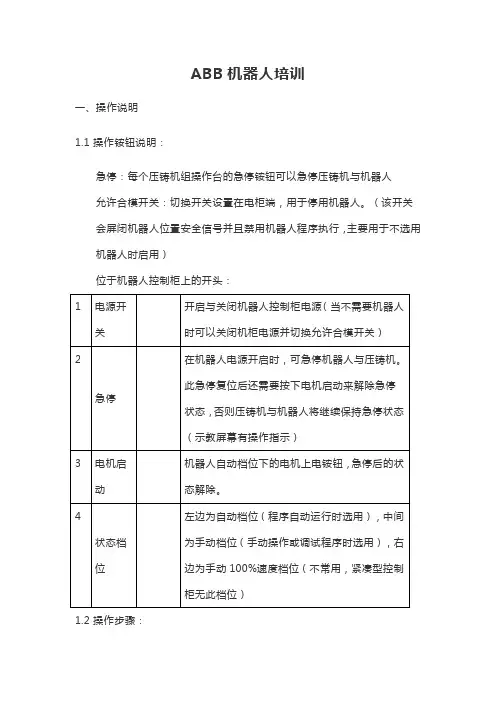
ABB机器人培训一、操作说明1.1 操作铵钮说明:1.2 操作步骤:使用操作:打开机器人电源→机器人状态档位打到自动(如果从手动切换到自动时示教器触屏上还需按下确认)→检查允许合模开关为使用机器人→检查各急停铵钮没有启用→启动压铸机并进行压铸前准备工作→按下机器人启动按钮(成功启动时启动铵钮会亮灯),压铸机打到自动再按下双手合模,至此机器人便开始循环自动工作。
二、机器人程序调试(适用于技术人员)2.1 ABB程序结构说明:ABB机器人程序结构共三层,顺序依次为:程序任务→程序模块→例行程序程序任务:包含程序的任务数量,多任务系统只应用于少数需求项目,本项目程序任务只有“R_BOT1”单任务。
“程序任务”是程序结构中的最顶层。
程序模块:1个任务中可包含多个模块。
一搬模块类型包含:主程序模块、系统模块、数据模块还有其它辅助功能模块等。
例行程序:用于存放与执行命令的地方,例行程序有三种类型:程序、功能、中断。
程序为正常顺序执行或被调用执行的程序指令集、功能为功能性指令调用而被执行的程序指令集、中断为外部条件满足时被执行的指令集。
每个任务中必需包含1个主程序,主程序名称一般为“main”。
程序结构介面可在程序编辑器中如下图所示的三个铵钮中进行切换。
2.2 程序指针:程序指针为程序中下一步即将被执行的指令前的箭头标志,也称作为“PP”。
换言之PP所指示的指令为下一步要被执行的指令。
调试程序时PP所指示的位置犹为重要。
PP标志图形如下图:黄色箭头所指示的99行为下一步被执行的指令。
2.3 关于程序运行的示教器实体按键:1、程序连接执行键2、程序停止执行键3、往上执行1步4、往下执行1步2.4 “程序编辑器”下则菜单条功能说明:1、“添加指令”可调出指令菜单,用于添加各种指令来完善程序功能2、“编辑”包含“复制”、“剪切”、“粘贴”等编辑功能3、“调试”用于移动程序指令位置和检查程序等4、“修改位置”用于把当前机械位置更改保存于光标选中的“MOVE”指令内所包括的实质位置数据(对于带功能指令的MOVE指令无效,如添加了“Offs”功能的MOVE指令。
目录1培训手册介绍--------------------------------------------- 22系统安全与环境保护--------------------------------------------- 33机器人综述--------------------------------------------- 54机器人示教--------------------------------------------125机器人启动--------------------------------------------256自动生产--------------------------- -----------------277编程与测试--------------------------- -----------------328输入输出信号--------------------------- -----------------509系统备份与冷启动--------------------------------------------5210文件管理--------------------------------------------54第一章培训手册介绍本手册主要介绍了A B B 机器人的基本操作与运行。
为了理解本手册内容 , 不要求具有任何机器人现场操作经验。
本手册共分为十章,各章节分别描述一个特别的工作任务和实现的方法。
各章节之间有一定联系。
因此应该按他们在书中的顺序阅读。
借助本手册学习操作机器人是我们的目的,但是仅仅阅读此手册也应该能帮助你理解机器人的基本的操作。
本手册依照机器人标准的安装编写,实际操作根据系统的配置会有差异。
本手册仅仅描述实现通常的工作作业的某一种方法,如果你是经验丰富的用户,可能会有其他的方法。
其他的方法和更详细的信息请阅读下列机器人手册 ( 英语版 ) 。
目录•机器人基础知识•abb机器人概述•机器人基本操作与编程•机器人高级操作与维护•机器人集成与应用案例•机器人安全与防护知识机器人基础知识机器人的定义与分类机器人的定义机器人是一种能够自动执行任务的机器系统。
它可以接受人类指挥,也可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
机器人的分类根据机器人的应用环境和功能特点,机器人可分为工业机器人、服务机器人、特种机器人等。
0102 03第一代机器人示教再现型机器人,主要由机器手控制器和示教盒组成,可按预先引导动作记录下信息重复再现执行。
第二代机器人感觉型机器人,如具有视觉、触觉、听觉等外部传感器,能实际检测工作环境变化给机器人反馈信号,控制其操作机构。
第三代机器人智能型机器人,是第二代机器人的发展,具有多种感知功能,可进行复杂的逻辑思维、判断和决策,在作业环境中独立行动。
机器人的发展历程ABDC工业制造领域机器人在工业制造领域的应用非常广泛,如焊接、装配、喷涂、搬运等。
它们可以提高生产效率、降低生产成本、提高产品质量等。
医疗卫生领域机器人在医疗卫生领域的应用也越来越多,如手术机器人、康复机器人、护理机器人等。
它们可以协助医生进行手术操作、帮助患者进行康复训练、提供日常的护理服务等。
军事领域机器人在军事领域的应用也越来越受到关注,如无人侦察机、无人战斗机、排爆机器人等。
它们可以执行高风险的任务、提高作战效率、减少人员伤亡等。
服务领域机器人在服务领域的应用也越来越多,如餐厅服务员、导游讲解员、智能家居等。
它们可以提供便捷的服务、提高服务质量、改善人们的生活品质等。
机器人的应用领域abb机器人概述abb机器人简介领先的工业机器人技术ABB作为全球领先的工业机器人制造商,提供先进的机器人技术和解决方案。
广泛的应用领域ABB机器人被广泛应用于焊接、装配、搬运、喷涂等领域,提高生产效率和产品质量。
不断创新和发展ABB致力于机器人技术的不断创新和发展,推动工业4.0和智能制造的进步。
目录之杨若古兰创作1培训手册介绍---------------------------------------------22零碎平安与环境呵护---------------------------------------------33机器人综述---------------------------------------------54机器人示教--------------------------------------------125机器人启动--------------------------------------------256主动生产--------------------------------------------277编程与测试--------------------------------------------328输入输出旌旗灯号--------------------------------------------509零碎备份与冷启动--------------------------------------------5210文件管理--------------------------------------------54第一章培训手册介绍•本手册次要介绍了A B B机器人的基本操纵与运转.•为了理解本手册内容,不请求具有任何机器人现场操纵经验.•本手册共分为十章,各章节分别描述一个特此外工作任务和实现的方法.•各章节之间有必定联系.是以应当按他们在书中的顺序浏览.•借助本手册进修操纵机器人是我们的目的,但是仅仅浏览此手册也应当能帮忙你理解机器人的基本的操纵.•本手册按照机器人尺度的安装编写,实际操纵根据零碎的配置会有差别.•本手册仅仅描述实现通常的工作功课的某一种方法,如果你是经验丰富的用户,可能会有其他的方法.•其他的方法和更具体的信息请浏览以下机器人手册(英语版).《使用指南U s e r’s G u i d e》与《产品手册P r o d u c t M a n u a l》.第二章零碎平安及环境呵护零碎平安:因为机器人零碎复杂而且风险性大,在练习期间,对机器人进行任何操纵都必须留意平安.不管什么时候进入机器人工作范围都可能导致严重的伤害,只要经过培训认证的人员才可以进入该区域.以下的平安守则必须恪守:•万一发生火灾,请使用二氧化碳灭火器.•急停开关(E-S t o p)不答应被短接.•机器人处于主动模式时,任何人员都不答应进入其活动所及的区域.•在任何情况下,不要使用机器人原始启动盘,用复制盘.•机器人停机时,夹具上不该置物,必须空机.•机器人在发生不测或运转不正常等情况下,均可使用E-S t o p键,停止运转.•因为机器人在主动形态下,即使运转速度非常低,其动量仍很大,所以在进行编程、测试及维修等工作时,必须将机器人置于手动模式.•气路零碎中的压力可达,任何相干检修都要切断气源.•在手动模式下调试机器人,如果不须要挪动机器人时,必须及时释放使能器(E n a b l e D e v i c e).•调试人员进入机器人工作区域时,必须随身携带示教器,以防他人误操纵.•在得到停电通知时,要事后关断机器人的主电源及气源.•突然停电后,要赶在来电之前事后关闭机器人的主电源开关,并及时取下夹具上的工件.•维修人员必须保管好机器人钥匙,严禁非授权人员在手动模式下进入机器人软件零碎,随意翻阅或点窜程序及参数.•平安事项在《用户指南U s e r’s G u i d e》平安这一章节中有具体说明.现场功课发生的废弃物处理:现场服务发生的风险固体废弃物:废工业电池废电路板废润滑油废油脂粘油回丝或抹布废油桶损坏的零件包装材料现场功课发生的废弃物处理方法:•现场服务发生的损坏零件由我公司现场服务人员或客户修复后再使用.•废包装材料,我方现场服务人员建议客户交回收公司回收再利用.•现场服务发生的废工业电池和废电路板,由我公司现场服务人员带回后交还供应商,或由客户保管,在购买新电池时作为交换物.•废润滑油、废润滑脂、废油桶、粘油废棉丝和抹布等,建议客户分类收集后交给专业公司处理.第三章机器人综述机器人零碎:机器人控制零碎:S41994-1996生产的机器人S4C1997-1999生产的机器人S4C p l u s2000年当前生产的机器人机器人本体:I R B1400工作范围较小,最大承载5k g,经常使用于焊接与小范围搬运.I R B2400工作范围较小,最大承载16k g,经常使用于焊接、涂刷、搬运与切割.I R B4400工作范围较大,最大承载60k g,经常使用于搬运.I R B6400工作范围较大,最大承载200k g,经常使用于搬运与点焊.I R B6400R I R B6400升级版,1999年开始生产,2000年后全面替代I R B6400.I R B640工作范围较大,最大承载160k g,堆垛公用的四轴机器.I R B140工作范围很小,最大承载为5k g,经常使用于焊接.I R B840工作范围很大,最大承载1200k g,搬运公用龙门架机器人.I R B340最大承载为1k g,分拣公用机器人.机器人型号:机器人惯例型号:I R B1400I R B2400I R B4400I R B6400•I R B指A B B尺度机器人•第一名数(1,2,4,6)指机器人大小•第二位数(4)指机器人属于S4当前的零碎.•不管何种型号机器人,都暗示机器人本体特性,适用于任何机器人控制零碎.机器人铭牌与零碎盘:机器人铭牌机器人零碎盘标签机器人构成:3.2.1机械手(M a n i p u l a t o r)•机械手是由六个转轴构成的空间六杆开链机构,理论上可达到活动范围内空间任何一点.•六个转轴均有A C伺服电机驱动,每个电机后均有编码器.•每个转轴均带有一个齿轮箱,机械手活动精度(综合)达正负至正负.•机械手带有手动松闸按钮,用于维修时使用.•机械手带有平衡气缸或弹簧.•机械手带有串口测量板(S M B),测量板带有六节可充电的镍铬电池,起保管数据感化.控制柜(C o n t r o l l e r)外观:Mains Switch:主电源开关Teach Pendant:示教器Operator’s Panel:操纵面板Disk drive:磁盘驱动器控制零碎:Robot computer board:机器人计算机板,控制活动与输入/输出通讯.Memory board:存贮板,添加额外的内存.Main computer board:主计算机板,含8M内存,控制全部零碎.Optional boards:选项板插槽.Communicationboards:通讯板,用于收集或现场总线通讯.驱动零碎:DC link:将三订交流电转换为三相直流电.Drive module:每个单元控制2-3根转轴的转距.电源零碎:Transformer:进电变压器.Supply unit:直流供电单元,整流输出电压及短路呵护.其他次要部件:Lithium batteries:锂电池,存储备用电源.Panel unit:零碎平安面板单元,处理所有影响平安与操纵的旌旗灯号.I/O units:输入/输出单元.零碎软件(R o b o t W a r e):R o b o t W a r e是A B B提供的机器人系列利用软件的总称,R o b o t W a r e目前包含B a s e W a r e,B a s e W a r e O p t i o n,P r o c e s s W a r e,D e s k W a r e与F a c t o r y W a r e五个系列.S4零碎机器人:•每台机器人均配有一张I R B盘、三张零碎盘和若干张参数盘,其中I R B盘为每台机器人特有,其他盘片只需版底细同可以通用.•根据机器人工作性质,每台机器人可以另外添加利用软件选项盘.S4C零碎机器人:•每台机器人均配有一张K e y盘与一套零碎盘,K e y盘为每台机器人特有,其他盘片只需版底细同均可以通用.•根据机器人工作性质,每台机器人可以另外添加利用软件选项盘.S4C p l u s零碎机器人:•每台机器人均配有一张零碎光盘与一张K e y盘或一组密码,K e y盘或密码为每台机器人特有,零碎光盘只需版底细同可以通用.• 零碎光盘中包含机器人冷启动软件R o b I n s t a l l 与收集通讯软件F T P .R o b o t S t a d i o :• R o b o t S t a d i o 是A B B 公司自行开发的机器人模拟软件,能在P C 机上模拟几乎所有型号的A B B 机器人几乎所有的操纵.• 通过对C A D 图纸的转换,R o b o t S t a d i o 可以模拟机器人核心设备与夹具,能够用于配置机器人零碎.• R o b o t S t a d i o 还带无机器人与零碎参数配置软件C o n f i g E d i t 、离线编程软件P r o g r a m M a k e r 与机器人冷启动软件R o b I n s t a l l 等.•部分A B B 机器人随机配备R o b o t S t a d i o L i t e . • R o b o t S t a d i o L i t e 安装后,须要申请密码方能使用.• 对P C 硬件配置的更改,都会形成原密码失效.第四章 机器人示教机器人示教单元:操纵面板功能:马达上电按钮(带显示灯):显示灯常亮,机器人已上电,待命形态.显示灯闪烁操纵面板 Operator ’sPanel 示教器 Teach Pendant(1H z),机器人未上电.显示灯急促闪烁(4H z),机器人未同步.机器人急停按钮:操纵模式选择器(带钥匙):主动模式:用于正式生产,编辑程序功能被锁定.手动限速模式:<250m m/s用于机器人编程测试.手动全速模式:只答应专业人员在测试程序时使用.普通情况下,防止使用这类活动模式.(选配项)机器人运转时间计时器:显示机械手马达上电,刹车释放的总时间.为机器人维修与调养提供数据.示教器功能:Emergency stop button(E-Stop):急停开关.Enabling device:使能器.Joystick:把持杆.Display:显示屏.窗口键:(W i n d o w k e y s)J o g g i n g-把持窗口手动形态下,用来把持机器人.显示屏上显示机器人绝对地位及当前座标系.P r o g r a m-编程窗口手动形态下,用来编程与测试.所有编程工作都在编程窗口中完成.I n p u t/O u t p u t s-输入/输出窗口显示输入输出旌旗灯号表与其数值.可手动给输出旌旗灯号赋值.M i s c.-其他窗口:包含零碎参数、服务、生产和文件管理窗口.导航键:(N a v i g a t i o n k e y s)L i s t-切换键将光标在窗口的几个部分间切换.(通常由双实线分隔)N e x t P a g e-向下翻页键将光标向下快速挪动.P r e v i o u s P a g e-向上翻页键将光标向上快速挪动.U p a r r o w s-光标上移键将光标向上单步挪动.D o w na r r o w s-光标下移键将光标向下单步挪动.L e f t a r r o w s-光标左移键将光标向左单步挪动.R i g h t a r r o w s-光标右移键将光标向左单步挪动.活动控制键:(M o t i o n k e y s)M o t i o n U n i t-活动单元切换键手动形态下,把持机器人本体与机器所控制的其他机械安装(外轴)之间的切换.M o t i o n T y p e1-活动模式切换键1直线活动与姿势活动切换键.•直线活动是指机器人T C P沿座标系X、Y、Z轴方向作直线活动.•姿势活动是指机器人T C P在坐标系中X、Y、Z轴数值不变,只沿着X、Y、Z轴扭转,改变姿势.M o t i o n T y p e2-活动模式切换键2单轴活动选择键.•第一组:1、2、3轴•第二组:4、5、6轴I n c r e m e n t a l-点动把持键启动或关闭点动把持功能,从而控制机器人手动运转时速度.其他键:(O t h e r k e y s)S t o p-停止键停止机器人程序运转.C o n t r a s t-光亮键调节显示器对比度.M e n u K e y s-菜单键显示下拉式菜单(热键),共有五个菜单键,显示包含各种命令的菜单.F u n c t i o n k e y s-功能键直接选择功能(热键),共有五个功能键,直接选择各种命令.D e l e t e-删除键删除显示屏所选数据,机器人操纵时,所要删除任何数据、文件、目录等,都用此键.E n t e r-回车键进入光标所示数据.自定义键:(P r o g r a m m a b l e k e y s)P1-P5这五个自定义键的功能可由程序员自定义,每个键可以控制一个模拟输入旌旗灯号或一个输出旌旗灯号和其端口.手动操纵机器人:把持窗口切换:将机器人操纵模式选择器置于手动限速模式.切换至把持窗口.活动控制键:活动单元切换键:E x t e r n a l U n i t-外轴活动单元R o b o t-机器人•光标指向机器人,把持杆把持机器人本体活动.•光标指向外轴,把持杆把持外轴,一台机器人最多可控制六个外轴.活动模式切换键:L i n e a r-直线活动•机器人工具姿势不变,机器人T C P沿座标轴线性挪动.•选择分歧坐标系,机器人挪动方向将改变.R e o r i e n t a t i o n-姿势活动•机器人T C P地位不变,机器人工具沿座标轴动弹,改变姿势.A x e s-单轴活动•A x e s1,2,3-第一、二、三轴•A x e s4,5,6-第四、五、六轴座标系设定:座标系品种:•World coordinates大地座标系•Base coordinates基础座标系•Tool coordinates工具座标系•Work object coordinates工件座标系座标系选择:进入把持窗口后,使用光标挪动键将光标移至选项C o o r d,此时显示器下端功能键上将显示W o r l d、B a s e、T o o l、W o b j四种选项,按响应功能键选择座标系.工具选择:进入把持窗口后,使用光标挪动键将光标移至选项T o o l,按回车键,此时显示器显示机器人零碎内工具清单,使用光标挪动键将光标移至响应的工具,通过功能键O K选择.工件座标系选择:使用光标挪动键将光标移至选项W o b j,按回车键,显示器显示工件座标系清单,将光标移至响应的工件座标系,通过功能键O K选择.只无机器人座标系C o o r d选择W o b j时,此项选择才起感化.4.4.4把持杆锁定选择:进入把持窗口后,使用光标挪动键将光标移至选项Joystick lock,此时显示器下端功能键上将显示None与三种箭头共四种选项,按响应功能键选择锁定机器人把持杆前后、摆布与扭转.4.4.5点动速度选择:使用光标挪动键将光标移至选项Incremental,显示器下端功能键上显示None、Small、Medium、Large 与User四种选项,按响应功能键选择响应速度.用点动把持键可以快速控制点动速度打开或关闭.当机器人处于点动形态时,每动一下摇杆,机器人挪动一步,摇杆倾斜超出1秒钟后,机器人以每秒10步的速度连续挪动,直到摇杆复位.•No(Normal)正常形态,连续挪动.•Small小,每单元移度.•Medium中,每单元挪动度.•Large大,每单元挪动度.•U s e r用户自定义点动速度.机器人当前地位显示:进入把持窗口后,在显示屏右边R o b o t p o s会显示机器人当前地位.•当机器人活动模式为直线活动或姿势活动时,显示屏显示机器人当前X、Y、Z座标值与空间姿势值Q1、Q2、Q3、Q4.根据基座标系、机器人工具T C P或工件座标系的分歧选择,数值会发生变更.•当机器人活动模式为单轴活动时,显示屏显示机器人当前每个轴的转角偏差.使能器:•主动模式下,使能器无效.•手动模式下,使能器有三个地位.•起始为“0”,机器人电机不上电.•两头为“1”,机器人电机能上电.•终极为“0”,机器人电机不上电,必须回到起始形态才干再次使电机上电.直线活动:活动方式设置:把持机器人沿B a s e座标系的方向挪动:把持机器人沿T o o l座标系的方向挪动:把持机器人沿W o b j座标系的方向挪动:把持机器人沿W o r l d座标系的方向挪动:姿势活动:活动方式设置:机器人将以如图所示方式绕选定工具的中间点(T C P)扭转.单轴活动:外轴活动:活动方式设置:进入把持窗口,按活动单元切换键至外轴活动,此时显示屏在功能键处显示所有可控制的外轴名称.按功能键选摘要把持的外轴单元.如果零碎有超出5个外轴,按回车键,功能键上可显示其他的外轴.普通情况下,外轴采取单轴活动方式.第五章机器人启动机器人开机(合上电源):合上电源前,必须细心检查,确认无人处于机器人四周的防护区内.合上主电源开关初始形态:热启动:•机器人零碎主动检查机器人硬件,当检查完成而且没有发现故障,零碎将在示教器上显示以上界面信息.•在主动模式下,生产窗口将在几秒钟后出现.•正常启动后,通常坚持上次电源关闭时不异的形态.o程序指针地位坚持不变.o全部数字输出都坚持断电之前的值或者置为零碎参数中所指定的值.o正常情况下,开机后程序可以立刻运转.•机器人程序被正常运转后,机器人会慢慢地回到编程路径(有偏差),然后在程序的路径上继续.•活动设定和数据主动被设定到断电前不异的值.•机器人将继续对间断作出反应.•机器人在断电前激活的机械单元将在程序运转后主动被激活.•弧焊和点焊过程主动被重置.但是,如果程序正好履行到更改焊接数据的指令时,新数据将在接缝上过早被激活.热启动限制:•全部文件和串行通道都被关闭(可由用户程序控制).•全部模拟输出都被置为0,软伺服设定置被置为缺省值(可由用户程序控制).•焊缝跟踪不克不及被重置.•不受机器人驱动的独立的轴不克不及被重置.•如果在间断例行程序或错误处理程序正在履行时发生断电,程序路径不克不及被重置.•如果在地方处理器(C P U)非常忙的时候发生断电,有可能因为零碎没法正常关机而导致没法从头启动.在这类情况下机器人零碎将显示故障信息.热启动故障:•机器人启动时将对机器人功能进行广泛的检查.如果发生错误,会在示教器上以普通文本信息格式进行陈述,并在机器人的事件记录中进行记录.•其实不是所有故障信息都会使机器人没法运转,但任何故障信息都暗示机器人零碎存在成绩,会影响正常使用或丧失部分功能.•欲了解具体信息,请参阅相干机器人手册.第六章主动生产启动程序:将机器人操纵模式选择器置于主动生产模式.按功能键O K进入生产窗口.窗口题目(W i n d o w t i t l e):显示屏显示当前处在生产窗口,其内容不会变更,“P r o d u c t i o n I n f o”.机器人速率(R o b o t v e l o c i t y):显示屏显示机器人当前运转速度速率标的,其内容不会变更,“S p e e d:=”.程序运转指针(P r o g r a m p o i n t e r):•程序运转指针(简称P P)相当次要,它唆使出一旦启动程序,程序将从哪里起履行.•如果程序须要从头初始化,必须将程序运转指针移至主程序第一行.在当前窗口--->菜单键E d i t--->2S t a r tf r o m B eg i n n i n g--->O K确认程序清单(P r o g r a m l i s t):显示屏显示机器人当前运转的程序清单,可读出即将运转的指令.程序名称(P r o g r a m n a m e):显示屏显示机器人当前运转的程序名称.运转模式(R u n n i n g m o d e):显示屏显示机器人当前运转模式.如果须要更改,利用导航键中的L i s t键切换到窗口的上半部,再将光标移至运转模式,此时在功能键上出现“C o n t i n u o u s”与“C y c l e”选项,选择响应运转模式.•Continuous连续运转模式,当机器人履行完主程序最初一行后,主动再从第一行开始履行.•Cycle单轮回运转模式,当机器人履行完主程序最初一行,主动停止.程序运转形态(P r o g r a m s t a t u s):显示屏显示机器人当前运转形态.•Stopped机器人待命形态.•Running机器人正在运转程序.运转速率调整(A d j u s t e d v e l o c i t y):显示屏显示机器人当前运转速率,以百分比暗示.机器人运转速度为程序定义的速度乘以响应的运转速率.如果须要更改,利用导航键中的L i s t键切换到窗口的上半部,再将光标移至运转速率,此时功能键上出现“-%”、“+%”、“25%”与“100%”四个选项,通过功能键更改机器人活动速率,选择范围为1%-100%.•-%降低机器人运转速率.5%以下,每次降低1%;5%以上,每次降低5%.•+%添加机器人运转速率.5%以下,每次添加1%;5%以上,每次添加5%.•25%运转速率直接切换至25%.•100%运转速率直接切换至100%.程序运转:在生产窗口,功能键上显示“S t a r t”、“F W D”与“B W D”三种选项.按响应功能键启动机器人.•S t a r t连续履行程序.•F W D单步正向履行程序.•B W D单步逆向履行程序.停止程序运转:按下停止键即停止程序的运转.留意:正常情况下应当用这类方法停止机器人程序的运转,不要靠其他方式强行终止运转.故障信息:不管何时何种故障,一旦发生,机器人零碎会立即弹出故障信息窗口.每个故障信息都带有故障代码,并提供简单故障缘由,按下功能键O K,清除故障信息;按下功能键C h e c k,还能看到零碎提供的排除该错误的方法和建议.Error code number故障代码.Category of error故障类別.Reason for error故障发生的缘由.Message log记录故障发生的时间及简单的缘由.紧急制动及紧急制动的复位:•当急停键无效后,电机电源被敏捷切断而停止程序运转.•排除惹起急停的身分后,在示教器上按O K键确认故障信息,复位急停键偏从头按下MOTORS ON即可恢复零碎.关机:机器人所有的输出旌旗灯号都会因关机而消逝,夹具上的工件可能是以而掉上去.•首先停止程序的运转.•然后扭转主电源开关由1-0,切断380V电力.建议:除非停电不要关机,如许能包管后备电池的寿命.第七章编程与测试程序储存器( Program memory )的构成:•利用程序( Program )•零碎模块( System modules )机器人程序储存器中,只答应存在一个主程序;所有例行程序与数据不管存在于哪个模块,全部被零碎共享;所有例行程序与数据除特殊定义外,名称必须是独一的.利用程序( Program )的构成:•主模块( Main module )o主程序( Main routine )o程序数据( Program data )o例行程序( Routines )•程序模块( Program modules )o程序数据( Program data )o例行程序( Routines )零碎模块( System modules )的构成:•零碎数据( System data )•例行程序( Routines )所有A B B机器人都自带两个零碎模块,U S E R模块与B A S E模块,根据机器人利用分歧,有些机器人会配备响应利用的零碎模块.建议不要对任何主动生成的零碎模块进行点窜.编程窗口:.1菜单键F i l e:1Open…打开一个现有文件.(程序.p r g或模块.m o d)2New…新建一个程序.3Save program存储更改后的现有程序.4Save program as…存储一个新程序.5Print…打印程序,现曾经不使用.6Preferences…定义用户化指令集.7Check program检验程序,光标会提示错误.8Close在程序储存器中关闭程序.9Save module存储更改后的现有模块.(只在M o d u l e窗口中存在)0Save modul e as…存储一个新模块.(只在M o d u l e窗口中存在) .2菜单键E d i t:1Cut剪切,可能会丢失指令或数据.2Copy复制.3Paste粘贴,将剪切或复制的指令或数据粘贴到响应地位.4Go to Top将光标移至顶端.5Go to Bottom将光标移至底端.6Mark定义一块,涂黑部分.7Change Selected点窜指令中数据,可直接将光标移至响应地位按回车键.8Show value输入数据,可直接将光标移至响应数据按回车键.9Modpos点窜机器人地位,功能键上有. 0Search…寻觅指令,程序复杂时很有效..3菜单键I P L1与I P L2:。
A B B机器人培训内容本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.MarchABB机器人内部培训一.手动操纵工业机器人1.单轴运动控制(1)左手持机器人示教器,右手点击示教器界面左上角的“”来打开ABB菜单栏;点击“手动操纵”,进入手动操纵界面;如图1-1所示。
图1-1 进入手动操纵界面(2)点击“动作模式”,进入模式选择界面。
选择“轴1-3”,点击“确定”,动作模式设置成了轴1-3,如图1-2所示。
图1-2 模式选择界面(3)移动示教器上的操纵杆,发现左右摇杆控制1轴运动,前后摇杆控制2轴运动,逆时针或顺时针旋转摇杆控制3轴运动。
(4)点击“动作模式”,进入模式选择界面。
选择“轴4-6”,点击“确定”,动作模式设置成了轴4-6,如图1-3所示。
图1-3 “动作模式”的选择(5)移动示教器上的操纵杆,发现左右摇杆控制4轴运动,前后摇杆控制5轴运动,逆时针或顺时针旋转摇杆控制6轴运动。
【提示】轴切换技巧:示教器上的按键能够完成“轴1-3”和“轴4-6”轴组的切换。
2.线性运动与重定位运动控制(1)点击“动作模式”,进入模式选择界面。
选择“线性”,点击“确定”,动作模式设置成了线性运动,如图1-4所示。
(2)移动示教器上的操纵杆,发现左右摇杆控制机器人TCP点左右运动,前后摇杆控制机器人TCP点前后运动,逆时针或顺时针旋转摇杆控制机器人TCP点上下运动。
图1-4 线性运动模式操纵界面(3)点击“动作模式”,进入模式选择界面。
选择“重定位”,点击“确定”,动作模式设置成了重定位运动,如图1-5所示。
图1-5 “重定位”动作模式的选择(4)移动示教器上的操纵杆,发现机器人围绕着TCP运动。
3.工具坐标系建立工业机器人是通过末端安装不同的工具完成各种作业任务。
要想让机器人正常作业,就要让机器人末端工具能够精确地达到某一确定位姿,并能够始终保持这一状态。
ABB初级培训全部课程一、教学内容本课程以ABB初级培训教材为基础,共分为十个章节。
具体内容包括:1. 概述:介绍的定义、分类和应用领域。
2. 硬件组成:讲解的主要硬件部件,如控制器、执行器、传感器等。
3. 编程基础:介绍ABB编程语言,包括指令、函数、变量等。
4. 运动学:讲解的运动学原理,包括正向运动学和逆向运动学。
5. 路径规划:介绍的路径规划算法,如直线、圆弧、样条曲线等。
6. 传感器应用:讲解的各种传感器及其应用,如触摸传感器、红外传感器等。
7. 视觉系统:介绍的视觉系统原理及其在实际应用中的应用。
8. 通信与联网:讲解与外部设备、网络的通信原理及应用。
9. 控制系统:介绍的控制系统原理,包括PLC、触摸屏等。
10. 编程实例:通过实际案例,讲解编程在工业生产中的应用。
二、教学目标1. 使学生了解的基本概念、硬件组成和应用领域。
2. 培养学生掌握ABB编程语言,能进行简单的编程操作。
3. 培养学生具备分析、解决实际问题的能力,能运用技术进行创新实践。
三、教学难点与重点重点:ABB编程语言、运动学原理、路径规划、传感器应用、视觉系统、通信与联网、控制系统。
难点:运动学逆向求解、路径规划算法、视觉系统调试、通信协议、控制系统编程。
四、教具与学具准备1. 教具:ABB演示台、控制器、执行器、传感器等。
2. 学具:每人一台计算机,安装有ABB编程软件。
五、教学过程1. 实践情景引入:讲解在工业生产中的应用案例,激发学生兴趣。
2. 知识点讲解:分别讲解教材的十个章节,结合实际案例,让学生更好地理解。
3. 例题讲解:分析、讲解典型的编程实例,使学生掌握编程方法。
4. 随堂练习:布置练习题,让学生现场编程,巩固所学知识。
5. 小组讨论:分组讨论实际问题,引导学生运用技术进行创新实践。
六、板书设计根据教学内容,设计简洁、直观的板书,便于学生理解。
七、作业设计1. 作业题目:(1)简述的定义和分类。
(2)解释ABB编程语言中的指令、函数和变量。
ABB操作培训资料ABB操作培训资料目录第一章介绍1.1 基础知识1.1.1 定义1.1.2 分类1.1.3 应用领域1.2 ABB概述1.2.1 ABB历史1.2.2 ABB产品系列1.2.3 ABB特点与优势第二章 ABB安装与配置2.1 安装准备2.1.1 安装环境要求2.1.2 安装前的准备工作2.1.3 安装所需的工具和设备2.2 硬件配置2.2.1 组件介绍2.2.2 连接电源与电气控制2.2.3 外设连接2.3 软件安装与配置2.3.1 操作系统安装2.3.2 控制软件安装2.3.3 校准与配置参数第三章 ABB编程3.1 编程概述3.1.1 编程语言3.1.2 编程界面3.1.3 编程工具3.2 示教3.2.1 示教模式及操作3.2.2 示教模式与自动模式切换3.2.3 示教器配置与设置3.3 编程方法3.3.1 点位运动程序3.3.2 直线运动程序3.3.3 圆弧运动程序3.3.4 条件循环与跳转第四章 ABB运行与调试4.1 运行控制4.1.1 单一任务与多任务4.1.2 运行模式4.1.3 运行参数与速度设置4.2 示教和运行调试4.2.1 离线示教和调试4.2.2 在线示教和调试4.2.3 调试中的常见问题与解决第五章 ABB维护与故障排除5.1 日常维护5.1.1 硬件维护与保养5.1.2 软件更新与升级5.1.3 安全操作事项5.2 故障排除5.2.1 故障诊断与分析5.2.2 常见硬件故障解决方法5.2.3 常见软件故障解决方法附录:附件列表附件1:ABB产品目录附件2:ABB安装指南附件3:ABB编程手册法律名词及注释:1. ABB:瑞士ABB公司,全称为“ABB集团”,是全球领先的工业自动化和电力领域的公司。
2. :根据国际标准ISO 8373定义,是可编程多功能机械装置,通常具有以下特点:多关节运动、传感器反馈、自主决策、协作能力、精确控制等。
3. 示教:示教是指通过操作示教器将手臂移动到所需的位置,并记录下相应的轨迹和动作,实现对的编程。
目录
1培训手册介绍---------------------------------------------2
2系统安全与环境保护---------------------------------------------3
3机器人综述---------------------------------------------5
4机器人示教--------------------------------------------12
5机器人启动--------------------------------------------25
6自动生产--------------------------------------------27
7 编程与测试--------------------------------------------32
8 输入输出信号--------------------------------------------50
9 系统备份与冷启动--------------------------------------------52
10 文件管理--------------------------------------------54
第一章培训手册介绍
•本手册主要介绍了A B B机器人的基本操作与运行。
•为了理解本手册容,不要求具有任何机器人现场操作经验。
•本手册共分为十章,各章节分别描述一个特别的工作任务和实现的方法。
•各章节之间有一定联系。
因此应该按他们在书中的顺序阅读。
•借助本手册学习操作机器人是我们的目的,但是仅仅阅读此手册也应该能帮助你理解机器人的基本的操作。
•本手册依照机器人标准的安装编写,实际操作根据系统的配置会有差异。
•本手册仅仅描述实现通常的工作作业的某一种方法,如果你是经验丰富的用户,可能会有其他的方法。
•其他的方法和更详细的信息请阅读下列机器人手册(英语版)。
《使用指南U s e r’s G u i d e》与《产品手册
P r o d u c t M a n u a l》。
第二章系统安全及环境保护
2.1 系统安全:
由于机器人系统复杂而且危险性大,在练习期间,对机器人进行任何操作都必须注意安全。
无论什么时候进入机器人工作围都可能导致严重的伤害,只有经过培训认证的人员才可以进入该区域。
2.1.1 以下的安全守则必须遵守:
•万一发生火灾,请使用二氧化碳灭火器。
•急停开关(E-S t o p)不允许被短接。
•机器人处于自动模式时,任何人员都不允许进入其运动所及的区域。
•在任何情况下,不要使用机器人原始启动盘,用复制盘。
•机器人停机时,夹具上不应置物,必须空机。
•机器人在发生意外或运行不正常等情况下,均可使用E-S t o p键,停止运行。
•因为机器人在自动状态下,即使运行速度非常低,其动量仍很大,所以在进行编程、测试及维修等工作
时,必须将机器人置于手动模式。
•气路系统中的压力可达0.6M P,任何相关检修都要切断气源。
•在手动模式下调试机器人,如果不需要移动机器人时,必须及时释放使能器(E n a b l e D e v i c e)。
•调试人员进入机器人工作区域时,必须随身携带示教器,以防他人误操作。
•在得到停电通知时,要预先关断机器人的主电源及气源。
•突然停电后,要赶在来电之前预先关闭机器人的主电源开关,并及时取下夹具上的工件。
•维修人员必须保管好机器人钥匙,严禁非授权人员在手动模式下进入机器人软件系统,随意翻阅或修改程
序及参数。
•安全事项在《用户指南U s e r’s G u i d e》安全这一章节中有详细说明。
2.2 现场作业产生的废弃物处理:
2.2.1 现场服务产生的危险固体废弃物:
废工业电池废电路板
废润滑油废油脂
粘油回丝或抹布废油桶
损坏的零件包装材料
2.2.2 现场作业产生的废弃物处理方法:
•现场服务产生的损坏零件由我公司现场服务人员或客户修复后再使用。
•废包装材料,我方现场服务人员建议客户交回收公司回收再利用。
•现场服务产生的废工业电池和废电路板,由我公司现场服务人员带回后交还供应商,或由客户保管,在购
买新电池时作为交换物。
•废润滑油、废润滑脂、废油桶、粘油废棉丝和抹布等,建议客户分类收集后交给专业公司处理。
第三章机器人综述
3.1 机器人系统:
3.1.1 机器人控制系统:
S41994-1996生产的机器人
S4C1997-1999生产的机器人
S4C p l u s2000年以后生产的机器人
3.1.2 机器人本体:
I R B1400工作围较小,最大承载5k g,
常用于焊接与小围搬运。
I R B2400工作围较小,最大承载16k g,
常用于焊接、涂刷、搬运与切割。
I R B4400工作围较大,最大承载60k g,
常用于搬运。
I R B6400工作围较大,最大承载200k g,
常用于搬运与点焊。
I R B6400R I R B6400升级版,1999年开始生
产,2000年后全面替代
I R B6400。
I R B640工作围较大,最大承载160k g,
堆垛专用的四轴机器。
I R B140工作围很小,最大承载为5k g,
常用于焊接。
I R B840工作围很大,最大承载1200k g,搬
运专用龙门架机器人。
I R B340最大承载为1k g,分拣专用机器人。
3.1.3 机器人型号:
机器人常规型号:
I R B1400I R B2400
I R B4400I R B6400
•I R B指A B B标准机器人
•第一位数(1,2,4,6)指机器人大小
•第二位数(4)指机器人属于S4以后的系统。
•无论何种型号机器人,都表示机器人本体特性,适用于任何机器人控制系统。
3.1.4 机器人铭牌与系统盘:。