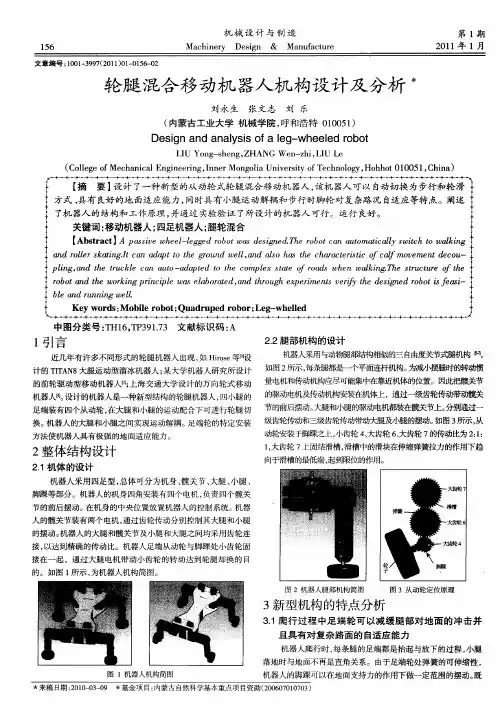
移动机器人运动机构
- 格式:pptx
- 大小:1.32 MB
- 文档页数:29
全方位移动机构的运动分析---开题报告近年来,随着移动机器人和相关技术的发展,使得移动机构在很多行业的应用逐渐深入和拓宽。
如具有全方位移动机构的火星探路者机器人、金字塔探秘移动机器人、移动机器人吸尘器、踢足球的移动机器人等。
移动机构是移动机器人运动的基础。
根据移动特性,可以分为非全方位和全方位移动机构两种。
在平面上移动的物体可以实现前后、左右和自转3个自由度的运动;若所具有的自由度少于3个,则为非全方位移动机构。
典型产品如汽车等,可以前进、拐弯而不能横向移动。
若具有完全的3个自由度,则为全方位移动机构。
全方位机构非常适合工作在空间狭窄有限、对机构的机动性要求高的场合中。
国外很多研究机构开展了全方位移动机器人的研制工作。
在车轮设计制造、机器人上轮子的配置方案、以及全方位机构的运动学分析等方面进行了广泛的研究,形成了许多具有不同特色的全方位移动机构产品。
国内虽然在移动机器人上的研究开展了一段时间,但是全方位的移动机器人还仅局限于几种固有的形式。
第一部分通过对全方位移动机构的结构特点和运动特性进行分析,为今后全方位移动机构的设计提供参考。
第二部分介绍移动机构的运动学分析介绍,第三部分介绍以自由轮系构成的移动机构,第四部分介绍以偏心转向轮构成的系。
全方位移动机构的运动学分析介绍假设移动机构具有刚性外壳,不变形的轮子,运动局限在平面上,则机构在平面上的位置可以由图1 表示。
平面世界坐标系定义为xOy ,点P为在机构本体上的参考点,车体坐标系为XPY ,则机构的位置和姿态可以由ξ= (x,y,θ)t表示,其中(x,y)为点P在平面世界坐标系中的位置, θ为世界坐标系下x轴到机构坐标系X轴的角度,逆时针为正。
用点P来代表移动机构,若能在平面世界坐标系下实现( x,y,θ)三个自由度的运动,则称其为全方位移动机构。
自由方向轮系1.Swedish轮Swedish轮也称Mecanum轮,由轮辐和固定在外周的许多小滚子构成,轮子和滚子之间的夹角为γ,通常夹角γ为45°,如图2所示。
机器人行走机构分类一、简介机器人行走机构是指用于实现机器人行走功能的机械结构。
机器人的行走机构种类繁多,根据不同的应用需求和环境条件,可以选择合适的行走机构来满足机器人的运动要求。
本文将对常见的机器人行走机构进行分类介绍。
二、轮式行走机构轮式行走机构是最常见的机器人行走机构之一,其特点是结构简单、易于控制和稳定性较高。
轮式行走机构通常由两个或多个轮子组成,通过电机驱动轮子旋转,从而实现机器人的行走。
轮式行走机构适用于平坦的地面,并且能够快速移动。
三、履带式行走机构履带式行走机构采用履带来实现机器人的行走,其特点是具有较好的通过性和抓地力。
履带式行走机构通常由一条或多条履带组成,通过电机驱动履带的运动,从而实现机器人的行走。
履带式行走机构适用于复杂的地形和恶劣的环境条件,能够克服一些障碍物。
四、足式行走机构足式行走机构模仿了生物的步态,通过仿生设计实现机器人的行走。
足式行走机构通常由多个关节和连接件组成,通过电机驱动关节的运动,从而实现机器人的行走。
足式行走机构具有较好的灵活性和适应性,能够适应不同的地形和环境条件。
五、腿式行走机构腿式行走机构是一种特殊的行走机构,其特点是具有较好的稳定性和适应性。
腿式行走机构通常由多个腿部组成,通过电机驱动腿部的运动,从而实现机器人的行走。
腿式行走机构适用于复杂的地形和狭窄的空间,能够克服一些障碍物。
六、轮腿混合式行走机构轮腿混合式行走机构是将轮式行走机构和腿式行走机构结合起来的一种行走机构。
轮腿混合式行走机构通常由轮子和腿部组成,通过电机驱动轮子和腿部的运动,从而实现机器人的行走。
轮腿混合式行走机构综合了轮式行走机构和腿式行走机构的优点,能够在不同的地形和环境条件下灵活行走。
七、其他行走机构除了上述介绍的常见行走机构外,还有一些其他特殊的行走机构,如链式行走机构、球形行走机构等。
这些行走机构通常被应用于特定的领域和特殊的环境条件,具有一些特殊的优势。
八、总结机器人行走机构是机器人的重要组成部分,不同的行走机构适用于不同的应用场景。
机器人复合式移动机构浅析作者:杨喜飞来源:《科学与财富》2019年第23期摘要:复合式行走机构集合了轮式、履带式或足式行走机构的优点,具备更好的适应能力,本文通过对复合式移动机构的设计原则进行梳理,分析不同设计原则下复合式移动机构的优缺点,为更好的开展复合式移动机构的设计提供借鉴。
关键词:机器人;移动机构;复合式前言移动机器人已经广泛应用在生产生活的各种领域,如家庭安防、陪护、救援、扫雷排险等[1]。
机器人移动机构的设计,尤其是机器人移动机构的移动控制以及越障能力,对于机器人移动性能和应用场景影响重大。
现有的移动机器人的移动机构主要有轮式、履带式和足式,其中以轮式的效率最高,但其适应能力相对较差,而足式的适应能力最强但其效率最低,履带式移动机构是将圆环状的循环轨道卷绕在若干车轮外,使车轮不直接与地面接触,利用履带可以缓和地面的凹凸不平。
它具有良好的稳定性能、越障能力和较长的使用寿命,适合在崎岖的地面上行使。
但履带式整体机构笨重,消耗的功率大,足式移动机构基本上是模仿人或动物的下肢机构形态而制成的,具备出色的地面适应能力和越野能力,但结构比较复杂,运动控制的难度较大,而且移动速度较慢[2]。
基于现有常规移动机构存在的不足,也陆续出现了一些复合式移动机构,如轮履复合式、轮足复合式等,复合式行走机构集合了轮式、履带式或足式行走机构的优点,具备更好的适应能力,如越障和上下楼梯等。
本文通过对复合式移动机构的设计原则进行梳理,分析不同设计原则下复合式移动机构的设计应用,为复合式移动机构的设计提供借鉴。
一、轮履复合式轮履复合式是将轮式和履带式进行复合设计的移动机构。
目前主要通过以下两种复合思路进行设计:并联叠加原则。
即将轮式和履带式在运动上相对独立的叠加在机器人移动本体上。
在移动本体上,通过设置各自独立的传动机构实现驱动轮和履带的驱动,轮式和履带式行走功能的切换,往往通过伸缩或升降机构来实现。
串联原则。
即将轮式和履带式在运动上相互关联的设置在机器人移动本体上,参见图1。
移动机器人的机构与分类分析一、移动机器人的机构一般而言,移动机器人的移动机构主要有轮式移动机构、履带式移动机构及足式移动机构,此外还有步进式移动机构、蠕动式移动机构、蛇行式移动机构和混合式移动机构,以适应不同的工作环境和场合。
一般室内移动机器人通常采用轮式移动机构,室外移动机器人为了适应野外环境的需要,多采用履带式移动机构。
一些仿生机器人,通常模仿某种生物运动方式而采用相应的移动机构,如机器蛇采用蛇行式移动机构,机器鱼则采用尾鳍推进式移动机构。
其中轮式的效率最高,但适应性能力相对较差;而足式的移动适应能力最强,但其效率最低。
1 轮式移动机构轮式移动机器人是移动机器人中应用最多的一种机器人,在相对平坦的地面上,用轮式移动方式是相当优越的。
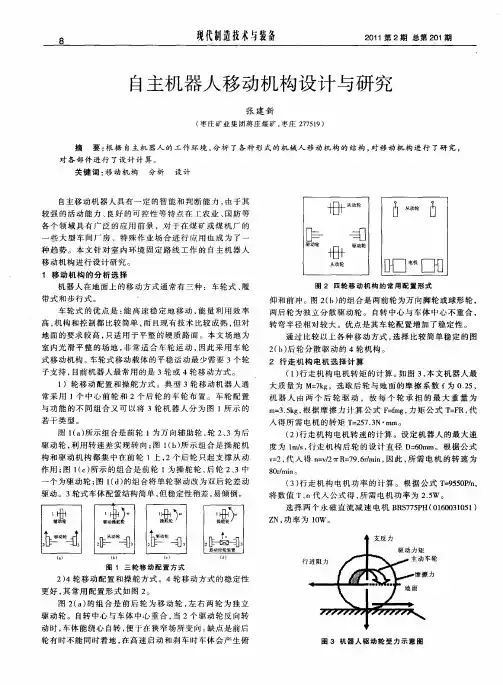
轮式移动机构根据车轮的多少有1轮、2轮、3轮、4轮及多轮机构。
1轮及2轮移动机构在实现上的障碍主要是稳定性问题,实际应用的轮式移动机构多采用3轮和4轮。
3轮移动机构一般是一个前轮,两个后轮。
其中,两个后轮独立动,前轮是万向轮,只起支撑作用,靠后轮的转速差实现转向。
4轮移动机构应用最为广泛,4轮机构可采用不同的方式实现驱动和转向,既可以使用后轮分散驱动,也可以用连杆机构实现4轮同步转向,这种方式比起仅有前轮转向的车辆可实现更小的转弯半径。
2 足式移动机构履带式移动机构虽在高低不平的地面上可以运动,但是它的适应性不够好,行走时晃动较大,在软地面上行驶时效率低。
根据调查,地球上近一半的地面不适合传统的轮式或履带式车辆行走,但是一般的多足动物却能在这些地方行动自如,显然,足式移动机构在这样的环境下有独特的优势。
足式移动机构对崎岖路面具有很好的适应能力,足式运动方式的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,而轮式和履带式移动机构必须面临最坏地形上的。
机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。
固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。
移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。
此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。
从移动机器人所处环境看,可以分为结构环境和非结构环境两类。
结构环境:移动环境是在轨道上(一维)和铺好的道路(二维)。
在这种场合,就能利用车轮移动结构。
非结构环境:陆上二维、三维环境;海上、海中环境;空中宇宙环境等原有的自然环境。
陆上建筑物的阶梯、电梯、间隙沟等。
在这样的非结构环境领域,可参考自然界动物的移动机构,也可以利用人们开发履带,驱动器。
例如:2足、4足、6足及多足等步行结构。
行走结构的设计对于移动机器人的工作效率有着至关重要的作用,选择适当、精巧的行走结构往往可以大大提高机器人的动作效率。
这就需要我们熟悉和了解不同机器人行走结构的类型及特点。
二、三种常见的行走结构1)车轮式移动结构两车轮:像自行车只有两个车轮的结构。
两车轮的速度、倾斜等物理量精度不高,因此进行机器人化,所需便宜、简单、可靠性高的传感器难以获得。
此外,两轮车制动时以及低速运行时也极不稳定。
三轮车:三轮移动结构是车轮式机器人的基本移动结构,其结构是后轮用两轮独立驱动,前轮用小脚轮构成组合。
这种结构的特点是结构组成简单,而且旋转半径可以从0到无限大,任意设定。
但是他的旋转中心是在连接两驱动轴的连线上,所以旋转半径即使是0,旋转中心也与车体的中心不一致。
四轮车:四轮车的驱动结构和运动基本上和三轮车相同。
和汽车一样,适合于高速行走,稳定性也好。
一般情况下,车轮式行走结构最适合平地行走,不能跨越高度,不能爬楼梯。
可跳跃移动机器人机构设计与跳跃过程控制研究综述目录一、内容概括 (2)1.1 跳跃移动机器人的研究背景与意义 (3)1.2 国内外研究现状及发展动态 (4)二、可跳跃移动机器人机构设计 (5)2.1 机器人总体结构设计 (7)2.2 跳跃机构设计 (7)2.2.1 基本跳跃机构 (9)2.2.2 复杂跳跃机构 (10)2.3 仿生跳跃机构设计 (10)2.3.1 蜻蜓式跳跃机构 (12)2.3.2 鸟类跳跃机构 (13)三、跳跃过程控制研究 (14)3.1 跳跃运动规划与控制策略 (15)3.1.1 基于预设轨迹的跳跃控制 (16)3.1.2 基于最优控制的跳跃控制 (18)3.1.3 基于模型预测控制的跳跃控制 (20)3.2 跳跃过程中的动力学分析与建模 (21)3.2.1 跳跃机器人的动力学建模 (22)3.2.2 跳跃过程中的力学分析 (24)3.3 跳跃机器人的感知与交互技术 (25)3.3.1 激光雷达感知技术 (26)3.3.2 触觉传感器感知技术 (28)3.3.3 人机交互技术 (30)四、实验与仿真分析 (31)4.1 实验环境搭建与实验方法 (33)4.2 实验结果与分析 (34)4.3 仿真结果与分析 (35)五、结论与展望 (36)5.1 研究成果总结 (37)5.2 存在问题与不足 (39)5.3 未来发展方向与展望 (40)一、内容概括随着科技的不断进步,可跳跃移动机器人作为一种具有高度自主性和灵活性的机器人形式,受到了广泛关注。
本文旨在对近年来可跳跃移动机器人机构设计与跳跃过程控制的研究进行综述,以期为该领域的发展提供参考和启示。
在可跳跃移动机器人机构设计方面,研究者们主要关注机器人的结构、驱动和跳跃性能等方面。
结构设计方面,为提高机器人的稳定性和机动性,往往采用多关节、柔性杆等复杂结构。
驱动方式上,除了传统的电机驱动外,还有采用生物启发式驱动(如仿生肌肉、形状记忆合金等)的机器人。
第二章机器人系统简介2.1 机器人的运动机构(执行机构)机器人的运动机构是机器人实现对象操作及移动自身功能的载体,可以大体分为操作手(包括臂和手)和移动机构两类。
对机器人的操作手而言,它应该象人的手臂那样,能把(抓持装工具的)手依次伸到预定的操作位置,并保持相应的姿态,完成给定的操作;或者能够以一定速度,沿预定空间曲线移动并保持手的姿态,并在运动过程中完成预定的操作。
移动机构应能将机器人移动到任意位置,并保持预定方位姿势。
为此,它应能实现前进、后退、各方向的转弯等基本移动功能。
在结构上它可以象人、兽、昆虫,具有二足、四足或六足的步行机构,也可以象车或坦克那样采用轮或履带结构2.1.1 机器人的臂结构机器人的臂通常采用关节——连杆链形结构,它由连杆和连杆间的关节组成。
关节,又称运动副,是两个构件组成相对运动的联接。
在关节的约束下,两连杆间只能有简单的相对运动。
机器人中常用的关节主要有两类:(1) 滑动关节(Prismatic joint): 与关节相连的两连杆只能沿滑动轴做直线位移运动,移动的距离是滑动关节的主要变量,滑动轴一般和杆的轴线重合或平行。
(2)转动关节(Revolute joint): 与关节相连的两连杆只能绕关节轴做相对旋转运动,其转动角度是关节的主要变量,转动轴的方向通常与轴线重合或垂直。
杆件和关节的构成方法大致可分为两种:(1) 杆件和手臂串联连接,开链机械手(2) 杆件和手臂串联连接,闭链机械手。
以操作对象为理想刚体为例,物体的位置和姿态各需要3 个独立变量来描述。
我们将确定物体在坐标系中位姿的独立坐标数目称为自由度(DOF(degree of freedom))。
而机器人的自由度是由有关节数和每个关节所具有的自由度数决定的(每个关节可以有一个或多个自由度,通常为1 个)。
机器人的自由度是独立的单独运动的数目,是表示机器人运动灵活性的尺度。
(由驱动器能产生主动动作的自由度称为主动自由度,不能产生驱动力的自由度称为被动自由度。
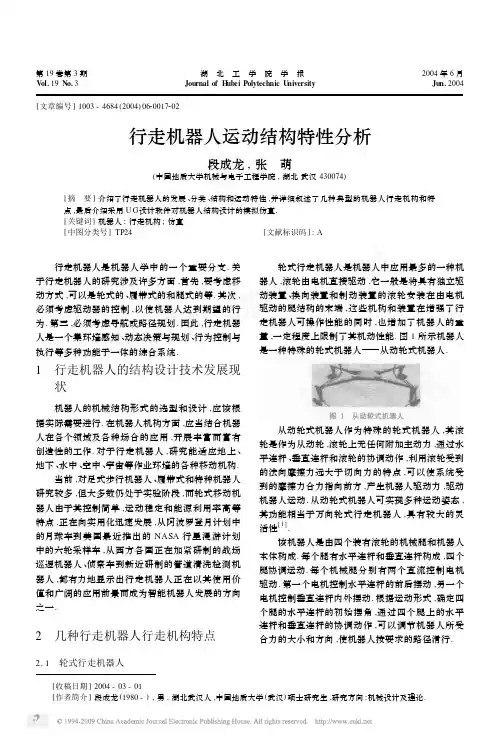
第19卷第3期湖 北 工 学 院 学 报2004年6月V ol.19N o.3 Journal of H ubei Polytechnic U niversity Jun.2004[收稿日期]2004-03-01[作者简介]段成龙(1980-),男,湖北武汉人,中国地质大学(武汉)硕士研究生,研究方向:机械设计及理论.[文章编号]1003-4684(2004)0620017202行走机器人运动结构特性分析段成龙,张 萌(中国地质大学机械与电子工程学院,湖北武汉430074)[摘 要]介绍了行走机器人的发展、分类、结构和运动特性,并详细叙述了几种典型的机器人行走机构和特点,最后介绍采用U G 设计软件对机器人结构设计的模拟仿真.[关键词]机器人;行走机构;仿真[中图分类号]TP24[文献标识码]:A 行走机器人是机器人学中的一个重要分支.关于行走机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式的和腿式的等.其次,必须考虑驱动器的控制,以使机器人达到期望的行为.第三,必须考虑导航或路径规划.因此,行走机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统.1 行走机器人的结构设计技术发展现状 机器人的机械结构形式的选型和设计,应该根据实际需要进行.在机器人机构方面,应当结合机器人在各个领域及各种场合的应用,开展丰富而富有创造性的工作.对于行走机器人,研究能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构.当前,对足式步行机器人、履带式和特种机器人研究较多,但大多数仍处于实验阶段,而轮式移动机器人由于其控制简单,运动稳定和能源利用率高等特点,正在向实用化迅速发展,从阿波罗登月计划中的月球车到美国最近推出的NASA 行星漫游计划中的六轮采样车,从西方各国正在加紧研制的战场巡逻机器人、侦察车到新近研制的管道清洗检测机器人,都有力地显示出行走机器人正在以其使用价值和广阔的应用前景而成为智能机器人发展的方向之一.2 几种行走机器人行走机构特点2.1 轮式行走机器人轮式行走机器人是机器人中应用最多的一种机器人,滚轮由电机直接驱动,它一般是将具有独立驱动装置、换向装置和制动装置的滚轮安装在由电机驱动的腿结构的末端,这些机构和装置在增强了行走机器人可操作性能的同时,也增加了机器人的重量,一定程度上限制了其机动性能.图1所示机器人是一种特殊的轮式机器人从动轮式机器人.从动轮式机器人作为特殊的轮式机器人,其滚轮是作为从动轮,滚轮上无任何附加主动力,通过水平连杆、垂直连杆和滚轮的协调动作,利用滚轮受到的法向摩擦力远大于切向力的特点,可以使系统受到的摩擦力合力指向前方,产生机器人驱动力,驱动机器人运动.从动轮式机器人可实现多种运动姿态,其功能相当于万向轮式行走机器人,具有较大的灵活性[1].该机器人是由四个装有滚轮的机械腿和机器人本体构成.每个腿有水平连杆和垂直连杆构成,四个腿协调运动.每个机械腿分别有两个直流控制电机驱动.第一个电机控制水平连杆的前后摆动,另一个电机控制垂直连杆内外摆动.根据运动形式,确定四个腿的水平连杆的初始摆角,通过四个腿上的水平连杆和垂直连杆的协调动作,可以调节机器人所受合力的大小和方向,使机器人按要求的路径滑行.2.2 履带式行走机器人履带式行走机器人的行走机构支撑面积大,接地比压小,适合于松软或泥泞场地作业,下陷小,滚动阻力小,对路况具有较强的适应性,常见于军用机器人.履带行走方式具有爬坡能力强、承载能力大的特点,因此也常被设计成某些民用机器人.图2所示机器人是一种特殊的履带式机器人四周履带式机器人的履带结构.该机器人采用四周履带驱动,并且多节串连,除可实现一般的直线移动和曲线移动外,还能在爬坡、越障、翻倒、翻滚、严重歪斜以致侧面受阻的状态下继续移动,它的移动状态比较特殊,其一般的曲线和直线移动相对较少,较多的情况则是在侧翻或倾覆状态、机身两面着地或者前后节相互扭转时的移动;在过沟或过台阶的情况下首节抬头越障时的移动.考虑到情况的复杂性,所以借鉴仿生学原理,采用四周履带行走机构,微电机驱动,整机的行走既可协调控制,又可各节单独控制,如整机中的某一节因倾斜而导致侧面受阻时,通过倾斜传感器控制侧面履带工作,从而使各节之间的推拉作用和履带控制转向的灵活性得到充分发挥,在抬头机构的协调作用下实现适应复杂地形的蛇形移动和整机翻滚移动的功能.该移动机器人整机结构采用多节串联构成(一般不少于3节),每一节都可以单独控制并自行移动,其本身又是由几个独立的履带驱动单元构成四周履带驱动机构.整机主要由行走系、传动系、绞接系、抬头系4部分组成.节与节之间采用广义万向节结构相连;首末2节各有一套柔性抬头机构[2].2.3 足式行走机器人根据调查,在地球上近一半的地面不适合于传统的轮式或履带式车辆行走.但是一般多足动物却能在这些地方行动自如,显然足式与轮式及履带式行走方式相比具有独特的优势.足式行走对崎岖路面具有很好的适应能力,足式运动方式的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,而轮式运载工具必须面临最坏的地形上的几乎所有点.足式运动方式还具有主动隔振能力[3].尽管地面高低不平,机身的运动仍然可以相当平稳.足式行走在不平地面和松软地面上的运动速度较高,能耗较少.足式机器人种类繁多,有单腿跳跃型、四腿移动型、仿生多足爬行类,以及高级的仿人双腿行走型等.3 行走机器人的仿真研究Unigraphics (简称U G )是目前先进的CAD 软件.该软件可以用来模拟各种机器设备的工作、运动状态,从而验证设备结构设计及参数设定的正确性和优化性.将U G 设计软件应用于机器人行走机构设计中,可以对机器人建立三维几何模型,实现可视化的运动过程模拟.同时,运用其本身的模块可进行一般的运动仿真,如将其模型用Parasolid 导入到ADAM 软件,则可进行更加详细和复杂的运动不和动力学分析.[ 参 考 文 献 ][1] 李金良.混合机构式机器人的动力学建模及参数变化[J ].机械科学与技术,2003,6(6):22-24.[2] 江 浩.新型移动机器人的结构设计[J ].应用科技,2002,3(3):56-58.[3] 殷际英.关节型机器人[M ].北京:化工工业出版社,2003.Movement Characteristic Analysis of R obotand Movement EmulationDUAN Cheng 2long ,ZHAN G Meng(Faculty of Mechanical &Elect ronic Engi n.,Chi na U niv.of Geosciences ,W uhan 430074,Chi na )Abstract :The development of the robot and its classification ,structure and movement characteristics are introd 2uled and walking structure of several kinds of typical robots and their characterisistcs are described in detail U G software is applied to the emulation of the fobit structual design K eyw ords :robot ;walking structure ;emulation[责任编辑:张培炼]81湖 北 工 学 院 学 报 2004年第3期 。
机器人行走机构原理6机器人行走机构原理6一、轮式机构轮式机构是最常见的行走机构之一,它使用轮子作为机器人的主要移动方式。
轮式机构分为单轮式、双轮式和多轮式。
1.单轮式机构单轮式机构使用一个轮子作为机器人的主要运动部件。
轮子通常由橡胶或金属制成,可以通过电机驱动旋转。
机器人通过调整轮子的角速度和转向来实现移动和转弯。
单轮式机构具有简单、稳定、灵活等特点,适用于平整地面上的行走。
2.双轮式机构双轮式机构采用两个轮子作为机器人的运动部件。
与单轮式机构相比,双轮式机构在转弯时更加灵活,可以通过不同速度的轮子旋转来实现转弯运动。
3.多轮式机构多轮式机构通常使用三个或更多轮子作为机器人的主要运动部件。
多轮式机构可以实现更高的稳定性和灵活性,可以通过不同轮子的组合和旋转实现各种复杂的运动方式。
轮式机构的优点是结构简单、稳定性高、行走速度快,适用于平地和室内环境。
然而,在不平整或复杂的地面上行走时,轮子可能会受阻碍或无法保持稳定。
二、多足机构多足机构是一种仿生设计,模仿了动物的行走方式。
它通过多个类似于腿的结构来实现机器人的行走。
1.两足机构两足机构模仿了人类的行走方式,使用两个类似于人类腿的结构。
两足机构需要模拟人体的运动机制,包括膝关节和脚掌的摆动动作。
两足机构具有较好的稳定性和灵活性,可以适应不规则的地面和复杂的环境。
2.四足机构四足机构使用四个类似于动物四肢的结构。
四足机构通常具有较好的稳定性和负载能力,可以适应不平整的地面和恶劣的环境。
3.六足机构六足机构使用六个类似于昆虫腿的结构。
六足机构具有良好的适应性和敏捷性,可以适应各种复杂的地形和环境。
多足机构的优点是适应性强、稳定性高、能够克服不规则地形的限制。
然而,多足机构的设计和控制复杂度较高,会增加机器人的重量和能耗。
综上所述,机器人行走机构的选择取决于应用场景和需求。
轮式机构适用于平坦地面和室内环境,而多足机构适用于不规则地形和复杂环境。
未来,随着技术的不断发展,机器人行走机构将进一步优化,实现更高效、稳定和灵活的行走方式。
机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。
固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。
移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。
此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。
从移动机器人所处环境看,可以分为结构环境和非结构环境两类。
结构环境:移动环境是在轨道上(一维)和铺好的道路(二维)。
在这种场合,就能利用车轮移动结构。
非结构环境:陆上二维、三维环境;海上、海中环境;空中宇宙环境等原有的自然环境。
陆上建筑物的阶梯、电梯、间隙沟等。
在这样的非结构环境领域,可参考自然界动物的移动机构,也可以利用人们开发履带,驱动器。
例如:2足、4足、6足及多足等步行结构。
行走结构的设计对于移动机器人的工作效率有着至关重要的作用,选择适当、精巧的行走结构往往可以大大提高机器人的动作效率。
这就需要我们熟悉和了解不同机器人行走结构的类型及特点。
二、三种常见的行走结构1)车轮式移动结构两车轮:像自行车只有两个车轮的结构。
两车轮的速度、倾斜等物理量精度不高,因此进行机器人化,所需便宜、简单、可靠性高的传感器难以获得。
此外,两轮车制动时以及低速运行时也极不稳定。
三轮车:三轮移动结构是车轮式机器人的基本移动结构,其结构是后轮用两轮独立驱动,前轮用小脚轮构成组合。
这种结构的特点是结构组成简单,而且旋转半径可以从0到无限大,任意设定。
但是他的旋转中心是在连接两驱动轴的连线上,所以旋转半径即使是0,旋转中心也与车体的中心不一致。
四轮车:四轮车的驱动结构和运动基本上和三轮车相同。
和汽车一样,适合于高速行走,稳定性也好。
一般情况下,车轮式行走结构最适合平地行走,不能跨越高度,不能爬楼梯。