控制系统的数学模例题精解
- 格式:ppt
- 大小:432.50 KB
- 文档页数:39
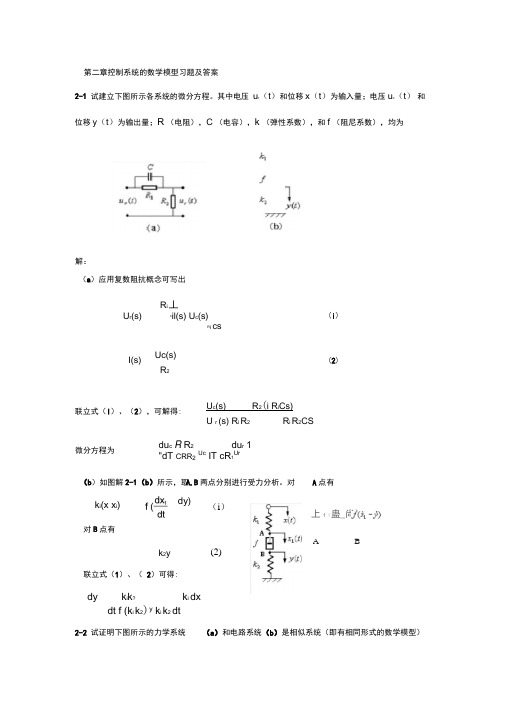
第二章控制系统的数学模型习题及答案2-1 试建立下图所示各系统的微分方程。
其中电压u r(t)和位移x(t)为输入量;电压u c(t)和位移y(t)为输出量;R (电阻),C (电容),k (弹性系数),和f (阻尼系数),均为解:(a)应用复数阻抗概念可写出R i丄U r(s) c il(s) U c (s)R i cs(i )I(s)Uc(s)R2(2)2-2 试证明下图所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)联立式(I)、(2),可解得:U c(s) R2(i R i Cs)U r (s) R i R2 R i R2CS微分方程为du c R R2du r1"dT CRR2Uc IT cR1Ur(b)如图解2-1(b)所示,取A,B两点分别进行受力分析。
对A点有k i(x x i) dy) (i)对B点有k2y (2)联立式(1)、(2)可得:dy k i k? k i dxdt f (k i k2)y k i k2 dt上1(蛊_尙)A B解:(a)取A 、B 两点分别进行受力分析,如图解所示。
对A 点有k 2(x y)f 2(x y)f i (y y i ) (1)对B 点有f i ( y y i ) k i y i(2)对式(i )、(2)分别取拉氏变换,消去中间变量 y i ,整理后得(b)由图可写出U c (s)整理得如果设R i k i ,R 2 i k 2,C i f i ,C 2 f 2,则两系统的传递函数相同,所以两系统是相似的。
U c (s)。
U r (s)Y(s) 口2s 2 I f f " k i k ?k i k ?(一 -)s i f i f 2s 2(f i k 2 f 2k i)sk ikX(s)(f if k ik 2护1f 2k if 2k 2)s k ikU r (s)R 2iC 2sR ii C i S i C isU c (s) U r (s)R iR 2C iC 2s 2(R i C iR 2C 2)s i2R iR 2C iC 2s(R i CiR 2C 2R-i C 2)s i比较两系统的传递函数,2-3 求下图所示各有源网络的传递函数(f i k 2位脉冲响应和传递函数。



第6章控制系统的设计6.1学习要点1控制系统校正的概念,常用的校正方法、方式;2各种校正方法、方式的特点和适用性;3各种校正方法、方式的一般步骤。
6.2思考与习题祥解题6.1校正有哪些方法?各有何特点?答:控制系统校正有根轨迹方法和频率特性方法。
根轨迹法是一种直观的图解方法,它显示了当系统某一参数(通常为开环放大系数)从零变化到无穷大时,如何根据开环零极点的位置确定全部闭环极点的位置。
因此,根轨迹校正方法是根据系统给定的动态性能指标确定主导极点位置,通过适当配置开环零极点,改变根轨迹走向与分布,使其通过期望的主导极点,从而满足系统性能要求。
频率特性是系统或元件对不同频率正弦输入信号的响应特性。
频域特性简明地表示出了系统各参数对动态特性的影响以及系统对噪声和参数变化的敏感程度。
因此,频率特性校正方法是根据系统性能要求,通过适当增加校正环节改变频率特性形状,使其具有合适的高频、中频、低频特性和稳定裕量,以得到满意的闭环品质。
由于波德图能比较直观的表示改变放大系数和其他参数对频率特性的影响,所以,在用频率法进行校正时,常常采用波德图方法。
系统校正要求通常是由使用单位和被控对象的设计单位以性能指标的形式提出。
性能指标主要有时域和频域两种提法。
针对时域性能指标,通常用根轨迹法比较方便;针对频域性能指标,用频率法更为直接。
根轨迹法是一种直接的方法,常以超调量3% 和调节时间匚作为指标来校正系统。
频域法是一种间接的方法,常以相位裕量和速度误差系数作为指标来校正系统。
题6. 2校正有哪些方式?各有何特点?答:校正有串联校正方式和反馈校正方式。
校正装置串联在系统前向通道中的连接方式称为串联校正。
校正装置接在系统的局部反馈通道中的连接方式称为反馈校正。
如图6.1所示。
图6.1串联校正和反馈校正串联校正方式因其实现简单而最为常见。
反馈校正除能获得串联校正类似的校正效果外,还具有串联校正所不具备的特点:(1)在局部反馈校正中,信号从高能级被引向低能级,因此不需要经过放大;⑵能消除外界扰动或反馈环内部系统参数波动对系统控制性能的影响,提供系统更好的抗干扰能力。

习题2-1、试列写图2-40中各电路的微分方程,图中1u 、2u 为输入、输出电压。
答:(a )设中间变量i1,i2,i3如图所示,则根据基尔霍夫电压回路、节点电流定律,得dt C i R i u ⎰+=12111 -------------------(1)22312u R i dt C i +=⎰ --------------------(2) dt C i u ⎰=232 -------------------(3) 321i i i += --------------------(4)将(3)整理得: 223'u C i = ---------------------(5) 将(5)带入到(2),得222212'u u C R dt C i +=⎰ ---------------------(6)即 2122212'"u C u R C C i += ---------------------(7) 将(5)、(7)带入到(4)及(6)带入到(1),整理得=+=⎰dt C i R i u 121112222132')(u u C R R i i +++ (a(b)图2-40 习题2-1用图2222122212221')''"(u u R C R u C u C u R C C ++++=即1222222121122211'''"u u u C R u C R u C R u C R C R =++++设111C R T =,222C R T =,213C R T =,则122321221')("u u u T T T u T T =++++(b )设中间变量i1,i2,i3如图所示,则根据基尔霍夫电压回路、节点电流定律,得 2111'Li R i u += -------------------(1) 2232'u R i Li += --------------------(2)dt C iu ⎰=32 -------------------(3)321i i i += --------------------(4)将(3)变形得: 23'Cu i = ---------------------(5) 将(5)带入到(2),得2222''u Cu R Li += ---------------------(6)即 ⎰+=dt u Lu L C R i 22221---------------------(7) 将(5)、(7)带入到(4)及(6)带入到(1),整理得=+=2111'Li R i u 222132')(u Cu R R i i +++22212222')'1(u Cu R R Cu dt u Lu L C R ++++=⎰ ------(8) 对(8)两边求导,整理得121221221'')1(")(u u LRu C R L R u C R C R =++++设C R T 11=,C R T 22=,13R LT =,则有 123232221'1')1(")(u u T u T T u T T =++++ 或者为1322322321'')(")(u T u u T T u T T T =++++2-2 、设机械系统如图2-41所示,图中r θ、c θ为输入、输出角位移(角度),试列写该机械系统的微分方程。
第二章控制系统的数学模型习题及答案2-1 试建立如图所示系统的微分方程。
其中外力F(t)为输入量;位移y(t)为输出量;k为弹性系数,f为阻尼系数,质量为m。
解:以平衡状态为基点(不考虑重力影响),对m进行受力分析,根据牛顿定理可写出整理得。
2-2 求如图所示有源网络的传递函数Uc(s)/Ur(s)。
解:。
2-3.试求题如图所示控制系统的传递函数:,,,。
解:求得传递函数如下:。
2-3 计算如图所示RC网络的传递函数G(s)=Uc(s)/Ur(s)。
解:由图可写出(1)(2)(3)联立式(1)、(2)、(3),消去中间变量可得微分方程为。
2-4.试用梅逊公式求图示系统的传递函数C(s)/R(s)。
解:信号流图;;;;;;;;。
(可以用方框图简化方法进行验证)2-5.试用梅逊公式求图示系统的传递函数C(s)/R(s)。
[答案]2-6 试用梅逊增益公式求下图系统信号流图的传递函数x5/x1。
[答案]2-7 系统结构图如图所示,试求闭环传递函数。
解:经结构图等效变换可得闭环系统的传递函数。
2-8 已知控制系统结构图如图所示,求输入r(t)=3* 1(t) 时系统的输出c(t)。
解:由图可得又有R(s)=3/s,因此。
2-9 试用梅逊增益公式求下图系统的闭环传递函数。
解:利用梅逊公式:,,,,,,,,,。
本章教材作业题:2-2(a)(c)、2-3、2-5(2)、2-7、2-11、2-13、2-14、2-17(a、c、e)、。