武夷山机场及RNP AR飞行程序介绍
- 格式:ppt
- 大小:11.73 MB
- 文档页数:29

旗开得胜1概述与适用范围1.1本程序阐述了厦门航空有限公司RNP AR运行所需要的特殊维修要求和程序。
1.2本程序适用于厦航飞机维修工程部各部、福州分公司机务部。
1.3程序属性■CCAR121 ■CCAR145航线■CCAR145定检/部件2依据文件2.1AC-91-FS-05“要求授权的特殊航空器和机组(SAAAR)实施公共所需导航性能(RNP)程序的适航和运行批准准则”。
2.2《维修工程管理手册》“特殊运行的维修”。
3术语和定义3.1基于性能的导航(PBN):PBN将RNAV和RNP等一系列不同的导航技术应用归纳到一起,涵盖了从航路到进近着陆的所有飞行阶段。
其目的是为了充分利用现代航空器机载设备和导航系统,提供全球一致的适航要求和运行批准标准。
PBN规定了航空器在指定空域内或者沿ATS航路、仪表飞行程序的系统性能,包括导航的精度、完整性、可用性和所需功能。
3.2所需导航性能(RNP):具有机载导航性能监视和告警能力的RNAV。
RNP类型是由与RNP空域相关的精度值来规范的。
例如:RNP- 1的导航性能精度为1.85km(1n mile)就是说:在此指定空域内,根据95%的包容条件,航空器的导航性能都是1.85km(1n mile)。
3.3导航性能精度Navigation Performance Accuracy:由导航传感器误差、机载接收器误差、显示误差和飞行技术误差组合的总的导航精度,也称为“系统应用精度”。
3.4实际导航能力Actual navigation performance(ANP):指FMC用于计算目前位置的导航系统的实际精度,它以海里为单位表示。
RNP运行,要求当ANP大于RNP时,需有告警信号显示,以提醒飞行人员,而RNAV运行,则无此要求。
3.5RNP AR:RNP AR是RNP SAAAR的简写,即为要求授权的特殊航空器和机组(SAAAR)实施公共所需导航性能(RNP)程序的适航和运行。
要求授权的()公共所需导航性能()程序的适航和运行批准准则.目的. 本咨询通告为实施要求授权的()所需导航性能()的区域导航()仪表进近程序(航图上为“()”或“()”)的航空器运营人提供适航和运行批准指导。
矚慫润厲钐瘗睞枥庑赖賃軔朧。
. 本咨询通告提供了运营人实施公共仪表进近程序要求的符合性方法。
除遵循本咨询通告所述的方法外,运营人也可采用中国民用航空局认为是可接受的其他方法。
聞創沟燴鐺險爱氇谴净祸測樅。
. 本咨询通告强制性用语(如“必须”)仅是为了确保本咨询通告所描述的可接受的符合性方法的应用。
. 适用范围本咨询通告适用于、部、分部的航空承运人和运营人;也可供机场管理机构制定和公布公共飞行程序时参照。
残骛楼諍锩瀨濟溆塹籟婭骒東。
. 定义. 区域导航()。
一种导航方式,它可以使航空器在导航信号覆盖范围之内,或在机载导航设备的工作能力范围之内,或二者的组合,沿任意期望的航径飞行。
酽锕极額閉镇桧猪訣锥顧荭钯。
.估计位置偏差()。
一种基于确定的刻度的测量方法,以海里表示,它表明当前位置估计的性能,在某些航空器上也称作实际导航性能()和估计位置误差()。
彈贸摄尔霁毙攬砖卤庑诒尔肤。
. 飞行管理系统()。
由机载传感器、接收机和具有导航及航空器性能数据库的计算机组成的一套综合系统,可为显示器和自动飞行控制系统()提供性能和区域导航()引导。
謀荞抟箧飆鐸怼类蒋薔點鉍杂。
. 全球定位系统()。
是基于美国卫星的无线电导航系统,它提供全球的精确定位服务。
. 全球导航卫星系统()。
是全球位置、速度和时间测定系统的通用术语,包括一个或多个卫星星座、机载接收器和系统完好性监控。
包括、卫星增强系统()(如广域增强系统())、地面增强系统()(如局域增强系统())、全球导航卫星系统()、伽利略、北斗以及任何其它获批用于民航的卫星导航系统。
厦礴恳蹒骈時盡继價骚卺癩龔。
. 主视野()。
在本咨询通告中,主视野是指飞行员主要视线度内的范围。
版本:03-011. 主题内容与适用范围1.1 主题内容本程序阐述了RNP运行的工程管理、维修和放行标准与程序。
1.2 适用范围本程序适用于工程技术公司各职能部门、维修单位。
1.3程序属性■CCAR121 ■CCAR-145航线■CCAR-145定检/部件2. 引用文件和术语2.1 引用文件2.1.1 AC-91-FS-2010-01R1《在终端区和进近中实施RNP的运行批准指南》2.1.2 AC-91FS-05《要求授权的特殊航空器和机组(SAAAR)实施公共所需导航性能(RNP)程序的批准准则》2.1.3 东航MURNPM《所需的导航性能(RNP)运行手册》维修工作程序页次: 2-21-1版本:03-012.1.4 飞机制造厂家相关技术文件2.2 术语2.2.1 所需导航性能(RNP):是指在RNP空域内运行所必需的导航性能的声明,要求按照RNP类型的标准提高导航精度和增加辅助功能。
RNP 是具有机载导航性能监视和告警能力的RNAV。
2.2.2 区域导航(RNAV):区域导航(RNAV AREANAVIGATION)是一种导航方式,它可以使航空器在导航信号覆盖范围之内,或在机载导航设备的工作能力范围之内,或二者的组合,沿任意期望的航径飞行。
2.2.3 RNP AR(RNP所需授权):实施RNP进近必须获得局方的特殊授权。
国际民航组织(ICAO)的术语,美国FAA以前使用RNP SAAAR。
2.2.4 RNP SAAAR:要求的特殊航空器与机组授权(SAAAR),实施RNP进近需要局方的特殊授权,称作“要求的特殊航空器与机组授权”。
美国FAA逐步接纳ICAO术语RNP AR取代RNP SAAAR。
2.2.5 RNP运行:指经局方授权的特定机组和飞机,按以特定RNP性能要求为基础设计的航路,在某个特定区域飞行的运行。
该运行对飞机维护和工程管理有特定要求。
2.2.6 RNP空域:是指依据飞机能进入或连续飞行所创建的具备最低导航维修工作程序页次: 2-21-2版本:03-01 性能的航线或航段。

飞行员想知道:飞行程序中的这些定义机场标高aerodrome elevation机场标高大家应该很熟悉,但不少人对它是怎么确定的不太清楚,有的人还以为就是机场基准点(ARP)的标高。
事实上,机场标高是着陆区中最高点的标高,并不是一个固定点的标高。
在不知道机场标高的定义之前,我还对最低下降高(MDA)的定义有过疑惑。
最低下降高(MDH)是以机场标高为基准,如果入口标高在机场标高之下 2 米(7 英尺)以上,则以入口标高为基准。
那时候我比较纳闷:为什么只说入口标高低于机场标高的情况,难道入口标高高于机场标高2米以上时,还能以机场标高为基准吗?事实上机场标高的定义就已经告诉我们:不存在入口标高比机场标高还高的可能。
区域最低高度(AMA)area minimum altitude区域最低高度是在仪表气象条件(IMC)下所使用的最低高度。
它在通常由经纬线构成的特定区域提供最低超障高度。
其实区域最低高度跟网格最低偏航高度(Grid-MORA)差不多,都是表示在航图上一块矩形区域中的最低偏航高度,是在仪表气象条件下可以提供至少1000英尺(非山区)或2000英尺(山区)的超障高度。
中断着陆balked landing在超障高/高度(OCA/H)之下的任何点意外中断着陆动作。
从定义中也可以看出来,中断着陆只是部分的终止进近或复飞,在《复飞的那点事儿》中我们也介绍过,很多手册把中断着陆等效于低高度复飞。
反向程序reversal procedure在仪表进近程序的起始进近航段,能使航空器转到相反方向的程序。
它包括三种机动飞行方法,包括两种程序转弯和基线转弯。
程序转弯procedure turn程序转弯是一种机动飞行,先转弯脱离指定航迹接着向反方向转弯,使航空器能切入并沿指定航迹的反方向飞行。
程序转弯按照起始转弯的方向规定为“左”或“右”程序转弯。
按照各个程序的实际情况,程序转弯可以被规定为平飞或者下降转弯。
通常程序转弯分为45°/180°程序转弯和80°/260°程序转弯,如下图所示:基线转弯base turn在起始进近过程中航空器从出航航迹末端至中间进近或最后进近开始之间所作的转弯,前后两个航迹之差不是180°,通常是这个样子:直角航线程序racetrack procedure为使航空器在起始进近航段降低高度和或当进入反向程序不可行时,为建立航空器入航而设计的程序。

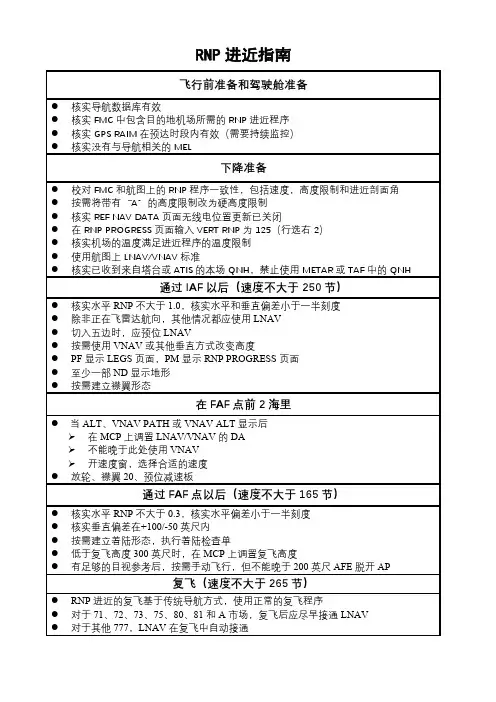
RNP进近指南飞行前准备和驾驶舱准备l核实导航数据库有效l核实FMC中包含目的地机场所需的RNP进近程序l核实GPS RAIM在预达时段内有效(需要持续监控)l核实没有与导航相关的MEL下降准备l校对FMC和航图上的RNP程序一致性,包括速度,高度限制和进近剖面角l按需将带有“A”的高度限制改为硬高度限制l核实REF NAV DATA页面无线电位置更新已关闭l在RNP PROGRESS页面输入VERT RNP为125(行选右2)l核实机场的温度满足进近程序的温度限制l使用航图上LNAV/VNAV标准l核实已收到来自塔台或ATIS的本场QNH,禁止使用METAR或TAF中的QNH通过IAF以后(速度不大于250节)l核实水平RNP不大于1.0,核实水平和垂直偏差小于一半刻度l除非正在飞雷达航向,其他情况都应使用LNAVl切入五边时,应预位LNAVl按需使用VNAV或其他垂直方式改变高度l PF显示LEGS页面,PM显示RNP PROGRESS页面l至少一部ND显示地形l按需建立襟翼形态在FAF点前2海里l当ALT、VNAV PATH或VNAV ALT显示后Ø在MCP上调置LNAV/VNAV的DAØ不能晚于此处使用VNAVØ开速度窗,选择合适的速度l放轮、襟翼20、预位减速板通过FAF点以后(速度不大于165节)l核实水平RNP不大于0.3,核实水平偏差小于一半刻度l核实垂直偏差在+100/-50英尺内l按需建立着陆形态,执行着陆检查单l低于复飞高度300英尺时,在MCP上调置复飞高度l有足够的目视参考后,按需手动飞行,但不能晚于200英尺AFE脱开AP复飞(速度不大于265节)l RNP进近的复飞基于传统导航方式,使用正常的复飞程序l对于71、72、73、75、80、81和A市场,复飞后应尽早接通LNAVl对于其他777,LNAV在复飞中自动接通需要终止进近的情况l出现以下任何一条信息:ØNAV UNABLE RNPØVERIFY POSITIONl并且满足以下条件:Ø没有足够的目视参考,且Ø没有替代的仪表程序能够使飞机继续进近终止进近 出现单发的情况并不一定要终止RNP进近,只要ANP小于RNP,并且水平垂直偏差满足要求,就可以在单发的情况下继续RNP进近。
区域导航(RNAV)和所需导航性能(RNP)介绍和区别区域导航RNAV空中交通史上的首批航路是沿地面台点设计的,在作出向、背台飞行的区别和台点的频率、航路宽度、飞行高度的规定后,飞机按设计的航路飞行,管制员按该航路计划实施管制。
由于当时还没有机载计算组件,飞机按逐台导航方法飞行。
随着VOR/DME成功地运用于导航和机载计算设备,出现了RNAV概念并得以初步应用。
RNAV被确认为一种导航方法,即允许飞机在相关导航设施的信号覆盖范围内,或在机载自主导航设备能力限度内,或在两者配合下沿所需的航路飞行。
这也正是目前陆基航行系统条件下RNAV航路设计的特点。
虽然可依靠机载计算组件作用,在导航台的覆盖范围内设计一条比较短捷航路,但仍按地面是否有导航台来设计航路。
陆基系统的RNAV航路可缩短航线距离,但飞行航路仍受到地面导航台的限制。
卫星导航系统的应用,从根本上解决了由于地面建台困难而导致空域不能充分利用的问题。
星基系统以其实时、高精度等特性使飞机在飞行过程中能够连续准确地定位。
在空域允许情况下,依靠星基系统的多功能性,或与FMC的配合,飞机容易实现任意两点间的直线飞行,或者最大限度地选择一条便捷航路。
一般来说利用卫星导航,飞行航路不再受地面建台与否的限制,实现了真正意义上航路设计的任意性。
因而卫星导航技术的应用使RNAV充分体现了随机导航的思想。
发展区域导航是为了提供更多的侧向自由度,从而有更多的能完全使用的可用空域。
该导航方式允许航空器不飞经某些导航设施,它有以下三种基本应用:1.在任何给定的起降点之间自主选择航线,以减少飞行距离、提高空间利用率;2.航空器可在终端区范围内的各种期望的起降航径上飞行,以加速空中交通流量;3.在某些机场允许航空器进行RNAV进近(如GPS进近落地),而无需那些机场的ILS。
RNAV设备是通过下列一种或几种的组合来进行区域导航的:VOR/DME, DME/DME,LORAN,GPS或 GNSS,甚低频波束导航系统,INS 或IRS。
RNP提纲本提纲供符合飞行机组资格认证程序的飞行机组使用。
RNAV(RNP)技术(737NG)·核实离场前是否按需完成了ANP预计。
·核实FMC使用了GPS更新(见POS REF页)。
·根据程序按需抑制VOR或DME(FMC NAV OPTIONS页)。
这是为了防止在失去GPS 位置数据时回到无线电更新。
·所有的航道跟踪均需使用LNAV。
需使用F/D。
强烈建议在所有的离场、进近和RNP 0.11中使用自动驾驶。
·如由于强风或其他因素致使飞机偏离航道,则准备脱开自动驾驶人工飞回所需航道,而不考虑坡度角是否超出F/D的横滚指令。
·程序中设有速度限制,有助于确保飞机在强风中,并在LNAV坡度能力范围中保持航迹。
遵守这些速度限制很重要,并且这需要飞行机组保持适当的飞机形态。
·应至少在一侧一直显示地形(TERR),并适时在一侧显示气象雷达(WX)。
·主要在ND上监控航道和航径跟踪,使用10NM或更小的范围。
如果飞机看来将偏离LNAV航道或VNAV航径,并且AFDS不正确,则按需参考RNP PROGRESS页面显示交叉航迹和垂直航迹误差。
准备脱开自动驾驶,人工飞回所需航道,而不考虑坡度角是否超出F/D的横滚指令。
如果处于进近中,则考虑复飞。
复飞开始后立即再次选择LNAV(不使用TO/GA至LNAV)。
RNP中国东方航空公司RNP 737-700训练手册离场程序·使用当地QRH设置高度表·回顾离场程序卡。
·FM C航路-选择适当的离场程序(RWY 05或RWY 23)。
·核实FMC使用GPS更新(见POS RE F页)。
·改进的爬升性能和V速度。
·无发动机引气起飞(推荐)。
·全额定起飞推力。
·襟翼1起飞。
(襟翼1为林芝机场唯一允许的起飞襟翼设置。
)·LNAV在地面预位。
大型飞机导航性能(RNP)进场着陆技术大型飞机导航性能(RNP)进场着陆技术2008.5目前飞机进场着陆技术已十分成熟,仪表着陆系统(ILS)是国际民航组织(ICAO)标准精确进场着陆设备,目前全世界仅民航机场(不包括军用机场)安装的ILS地面设备就超过2000多套。
虽然自20世纪70年代发展起来的微波着陆系统(MLS)原计划要取代ILS,但迄今为止,MLS并没有完全取代ILS,从全球范围来看,ILS仍是着陆设备的主流。
对于没有配备进场着陆系统的地区或进场着陆系统的使用受地形限制的地区,大型飞机如何安全进场着陆一直是世界各国关注的问题。
我国西部高海拔地区也面临同样的问题。
目前,国外正在研究开发一些新的进场着陆技术和系统,并取得显著进展。
一、所需导航性能(RNP)进场着陆技术1、RNP进场程序的技术特点所需导航性能(Required Navigation Performance,RNP)是近年来ICAO规定的关于在规定空域内必须具备的导航性能,这一规定有望成为日后新的国际标准。
规定RNP的目的在于使空域中的每架飞机的导航性能与空域要求相一致。
在RNP规范中,使用了隧道概念(Tunnel Concept)来定量描述飞机自起飞、爬升、巡航、下降、进场和着陆的所有飞行阶段的具体要求,即每个飞行阶段都有一个虚设的隧道,它规定了该飞行阶段飞行路径周界的包容面,飞机及其导航性能、飞行技术必须满足该飞行阶段所需的导航性能。
RNP区域导航技术是基于飞机自身导航系统、自动飞行系统和GPS全球定位系统引导飞机起降的新技术。
与传统导航技术相比,飞行员不必依赖地面导航设施即能沿着精准定位的航迹飞行,使飞机在能见度极差的条件下安全、精确地着陆,极大提高飞行的安全水平。
RNP区域导航技术相比传统的区域导航更为精确,特别适合用于山区复杂地形、复杂气象条件的机场。
RNP运行的一个基本要求是对航空公司及每一架飞机在各类RNP 空域飞行都要获得适航签证,初始签证需要进行技术评估,主要验证导航精度、故障显示和环境限制等指标。