机器人基础知识思维导图
- 格式:xmin
- 大小:4.04 MB
- 文档页数:1



6张思维导图看懂新一代人工智能知识体系孙正义预言:人工智能30年内一定出现,机器人智商将是人类的50倍;
凯文·凯利认为:人工智能是下一个20年里颠覆人类社会的技术,其力量堪比电与互联网;
李开复更断言:10年后,全世界50%的工作,都会被人工智能所取代!
人工智能是未来商业世界的最大趋势热点,腾讯、阿里、百度公司都各自成立了人工智能实验室。
关于人工智能的前世今生、内涵意义、学科技术体系、行业应用领域下面6张思维导图可以说是相当清楚全面了。
如要深入学习人工智能行业,
可通过以下300份人工智能深度研究报告进行系统学习
关注资鲸公众号:免费获取10 个领域200 份行业精品研究报告,50 份成功融资商业计划书
搜索关注公众号:资鲸,回复:人工智能。

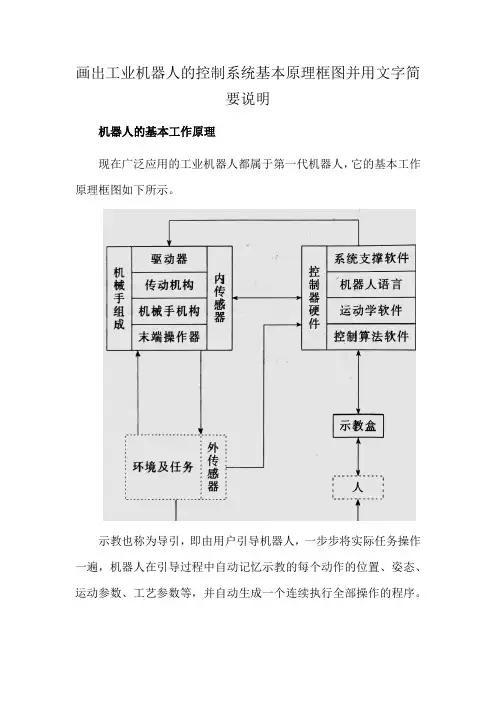
画出工业机器人的控制系统基本原理框图并用文字简要说明机器人的基本工作原理现在广泛应用的工业机器人都属于第一代机器人,它的基本工作原理框图如下所示。
示教也称为导引,即由用户引导机器人,一步步将实际任务操作一遍,机器人在引导过程中自动记忆示教的每个动作的位置、姿态、运动参数、工艺参数等,并自动生成一个连续执行全部操作的程序。
完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作,这就是示教与再现。
机器人的机械臂是由数个刚性杆体和旋转或移动的关节连接而成,是一个开环关节链,开链的一端固接在基座上,另一端是自由的安装着末端执行器(如焊枪),在机器人操作时,机器人手臂前端的末端执行器必须与被加工工件处于相适应的位置和姿态,而这些位置和姿态是由若干个臂关节的运动合成的。
因此,机器人运动控制中,必须要知道机械臂各关节变量空间和末端执行器的位置和姿态之间的关系,这就是机器人运动学模型。
一台机器人机械臂的几何结构确定后,其运动学模型即可确定,这是机器人运动控制的基础。
机器人机械手端部从起点的位置和姿态到终点的位置以及姿态的运动轨迹空间曲线叫做路径。
轨迹规划的任务是用一种函数来“内插”或“逼近”给定的路径,并沿时间轴产生一系列“控制设定点”,用于控制机械手运动。
目前常用的轨迹规划方法有空间关节插值法和笛卡尔空间规划两种方法。
当一台机器人机械手的动态运动方程已给定,它的控制目的就是按预定性能要求保持机械手的动态响应。
但是,由于机器人机械手的惯性力、耦合反应力和重力负载都随运动空间的变化而变化,因此要对它进行高精度、高速度、高动态品质的控制是相当复杂且困难的。
目前工业机器人上采用的控制方法是把机械手上每一个关节都当做一个单独的伺服机构,即把一个非线性的、关节间耦合的变负载系统,简化为线性的非耦合单独系统。
人工智能人工智能的定义
应用场景医疗、消费者、制造、汽车、零售、金融、智慧城市、交通、能源
理解误区
人工智能=机器人
人工智能的产品距普通人很遥远
通用型人工智能将在短期内到来
人工智能是“有意识的”
人工智能将在短期内取代人类的工作
人工智能是一项独立技术
专家定义
让机器达到同样的行为,即与人类做同样的行为
采用人工方法制造的,具体有智能的实体,或其研究领域
像人一样合理的思考,像人一样合理的行动
发展历程
第一次热潮——罗森布拉特与感知机
第二次浪潮——多层感知机
第三次浪潮——算力、大数据、深度学习
人工智能技术架构
基础设施硬件、算力、大数据
算法机器学习深度学习
技术方向
计算机视觉
语音技术
自然语言分析
大数据统计分析
博弈决策
具体技术
图像处理、图像识别、图像理解
语音识别、语音理解、语音合成
机器翻译、语义理解
情感分析。