超全制动力分配方法
- 格式:ppt
- 大小:12.42 MB
- 文档页数:32
第四章 汽车制动性第四节 制动力分配一、制动力分配要求根据制动稳定性的要求,前轮的附着率应大于后轮,即b1b2j j >,也就是说μ11μ22Z Z F F F F >制动方向稳定性的极限条件为:g g 210μ12g 1g g 1μ221g20Z Z Z Z h h l F mg zz F l h z F l l l h h l F F l h z F mg z z l l l +++====--- (4-16)式中:μ1F 、μ2F —前、后轮的理想制动力。
又由式(4-14),得:μ2μ1F F z mg mg=- (4-17) 当给定一个μ1F mg 值,即可从式(4-16)和(4-17)求出z 值和μ2F mg 值,这样就可得出如图4-16所示制动方向稳定性极限曲线。
制动力处于该曲线上时,可使车辆制动距离最短,是理想的前后制动器制动力分配曲线,称为I 线。
欧洲制动法规规定,轿车在0.150.8z ᆪᆪ范围内应满足b1b2j j >的要求。
只要车辆制动力分配处于I 线下方,就可保证前轮先抱死,使车辆处于制动稳定状态。
图4-16 稳定性界限(I 曲线)和最大制动距离界限为使制动距离不至于过长,上述法规又要求满足:p 0.10.85(0.2)z j ᆪ+- (4-18)因为在I 线下方,前轮先达到峰值附着率,这时前轴制动力为:21p ()g h l F mg z l lm j =+ (4-19)给定p j 值,即可从式(4-18)求出z 取值范围,由式(4-19)得到μ1F mg 的范围,随即从式(4-17)求得μ2F mg 的范围,这样可在图4-16上画出制动距离允许的极限曲线。
车辆前后轴制动力分配不得超越上述两条极限曲线。
对于前后轴制动力定比分配的车辆,有:μ2μμ2μ1F k F F=+;μ2μμ1μ1F k F mg k mg =- (4-20)式中:μk 为常数,是前后轴制动力的分配比。
制动法规下汽车制动器制动力比例关系的分配作者:杨唯巍翟海朋张博琦来源:《科教导刊·电子版》2014年第02期摘要通过理想状态下汽车制动时的受力分析并建立理想状态下的数学模型,对汽车制动力的分配在ECE法规下进行约束,求解出在约束条件下的值。
利用MATLAB进行编程得到理想制动力分配I曲线与€%[曲线,并做出汽车优化后在不同附着系数情况下附着系数的图形,通过理论分析完成对汽车实际制动时制动力分配的优化,提高汽车制动时的方向稳定性和地面附着条件的利用程度。
关键词制动力分配比仿真计算优化设计中图分类号:TU603 文献标识码:A对于一般汽车而言,当制动力足够大时,制动过程一般出现以下三种情况:(1)前轮先抱死拖滑,然后后轮抱死拖滑,此时汽车失去转向能力,附着条件没有得到充分利用;(2)后轮先抱死拖滑,然后前轮后抱死拖滑,此时后轴可能会出现侧滑,是不稳定工况,附着利用率也低;(3)前后轮同时抱死拖滑,此时可以避免后轴侧滑,附着利用率也比较好。
因此,汽车前、后轮制动器具有合理的制动力比例分配可以在一定程度减少制动距离,提高制动效率,减少交通事故,提高汽车的行驶安全性。
1具有固定比值的理想的前、后制动器制动力分配曲线从图2分析可知,优化后对于四个车轮都在相同附着系数的条件下即制动强度z=0.3下€%[0空=0.52和€%[0满=0.45。
由公式€%o0=可得€%[越小,则同步附着系数越小,越有利于汽车达到四轮同时抱死的制动效率较高的情况,同时避免出现后轮提前抱死的情况,当汽车在一定附着系数€%o路面行驶时,从图中可以明看到在满足制动法规要求的范围下无论是满载还是空载的I曲线靠近实际制动力分配曲线€%[曲线。
4结论为了使汽车在不同的负载情况下,前、后车轮制动力的分配比例总能合乎或接近理想要求,即前后轴附着力同时被充分利用,以获得尽可能好的制动性能,防止出现后轮比前轮先抱死的不稳定状态,或者前轮抱死而失去转向能力的状态,同时考虑到汽车在实际行驶过程中前后轮的制动力分配比例不能很好的和路面的附着情况相匹配,制动力也不能很好的按理想制动分配曲线进行分配,使得制动效率变低,出现不必要的制动工况,影响汽车的行驶安全性,因此,前后轮的制动力比例合理分配在汽车安全运用很重要,保证汽车在满足法规和实际制动要求的情况下,充分利用实际中的附着条件,提高制动效率,提高车辆的自身安性能。
汽车制动力分配调节装置结构与原理汽车制动力分配调节装置(Electronic Brakeforce Distribution,简称EBD)是一种用于调节车辆制动力分配的装置,它通过在车辆制动时根据车辆的动力学状态、负载和制动系统的工作状况,智能地分配前后轴上的制动力,从而提高制动性能和稳定性。
EBD的结构主要包括传感器、控制器和执行器三部分。
传感器用于感知车辆的动力学状态,如车速、纵向加速度、车辆倾斜角度等,同时还可以感知车辆的负载情况。
传感器通常安装在车轮、底盘和车身上。
控制器是EBD的核心部件,负责收集传感器数据,并根据预设的算法和逻辑进行计算,最后通过执行器调节制动力。
执行器一般是通过电动控制的制动系统或液压控制的制动系统来实现,例如电子制动系统(Electronically Controlled Brake System,简称ECB)或电控制动系统。
EBD的工作原理如下:当司机踩下制动踏板时,ECU即刻通过传感器获取到车速、车轮转速、车辆倾斜角度等信息。
根据这些信息,ECU能够判断出车辆当前的制动状态和负载情况。
接下来,ECU会根据预设的算法和逻辑,在前轴和后轴上智能地分配制动力。
在正常行驶时,EBD将制动力尽量均匀地分配给前后轴,以确保车辆在制动时的稳定性和平衡性。
在一些情况下,例如在危险情况下需要紧急制动时,EBD会将更多的制动力分配给后轴,以减少前轴的制动压力,防止前轮翻滚和车辆失控。
除了智能分配制动力外,EBD还可以提供制动力的调节功能。
例如,在车辆左右车轮抓地力不均匀的情况下,EBD可以通过调节不同车轮的制动力,使车轮间的抓地力更为均衡,从而提高制动性能和车辆稳定性。
总之,汽车制动力分配调节装置是一种通过感知车辆状态和调节制动力分配的装置,能够提高车辆的制动性能和稳定性。
随着车辆动力学控制技术的不断发展,EBD也将进一步提升,并与其他车辆稳定控制系统相结合,为驾驶人提供更加安全和舒适的驾驶体验。
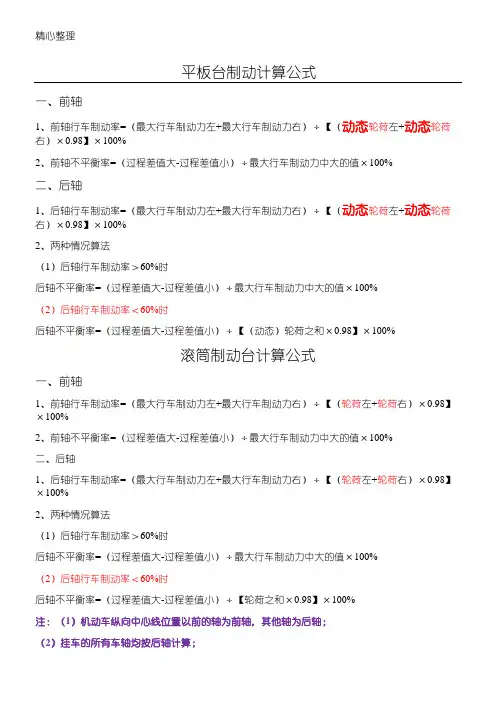
平板台制动计算公式
一、前轴
1、前轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(动态轮荷左+动态轮荷右)×0.98】×100%
2、前轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100%
二、后轴
1轮荷右)
×0.98】×
2
(1
(2
一、前轴
10.98】
×100%
2
二、后轴
10.98】
×100%
2、两种情况算法
(1)后轴行车制动率>60%时
后轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100%
(2)后轴行车制动率<60%时
后轴不平衡率=(过程差值大-过程差值小)÷【轮荷之和×0.98】×100%
注:(1)机动车纵向中心线位置以前的轴为前轴,其他轴为后轴;
(2)挂车的所有车轴均按后轴计算;
(3)用平板台测试并装轴制动力时,并装轴可视为一轴
整车制动率
整车制动率=最大行车制动力÷(整车轮荷×0.98)×100%
驻车制动率
驻车制动率=驻车制动力÷(整车轮荷×0.98)×100%
台式检验制动率要求(空载)
台式检验制动力不平衡率要求(空载和加载)。

§5 制动力分配的调节装置为了使汽车在不同的负载情况下,前、后车轮制动力的分配总能合乎或接近理想要求,即前后轴附着力同时被充分利用,以获得尽可能好的制动性能,特别是防止后轮抱死侧滑,在一些汽车的制动系中采用了各种各样的压力调节阀,来调整前、后轮制动器的输入液压或气压,以改变前后车轮的制动力分配。
前面已经讨论了制动力与制动力分配以及前、后轴车轮附着力同时被充分利用的条件(见式(9)),这里为了研究制动力分配调节装置的设计原理,再将制动力分配及理想的分配条件与前、后车轮制动器的输入液压或气压直接联系起来。
如果对汽车的空气阻力与滚动阻力忽略不计,则汽车在表面状态平整、均匀的良好路面上直线行驶时,地面对前、后轴车轮的法向反力1Z ,2Z 可由式(6)求出,地面对前、后轴车轮作用的制动力1B F ,2B F 使汽车产生减速度度du/dt 如式(7)所示。
以上两式又可改写为L g j h L g m Z g a /)]/([21+=L g j h L g m Z g a /)]/([22-= (106)j m F F a B B =+21式中 a m ——汽车质量;1L ,2L ——汽车质心离前、后轴的距离;g h ——汽车质心高度;g ——重力加速度;j ——汽车制动减速度;L ——汽车轴距。
汽车制动过程中,轮胎与地面的附着情况决定于制动力与其法向力之比,故理想的制动条件是0212211//)(//ϕ==+==g j g m F F Z F Z F a B B B B (107)在上式成立的条件下,当汽车作紧急制动时,前、后轴车轮会同时抱死。
0ϕ为同步附着系数。
如果式(107)不成立,则有2211//Z F Z F B B < 后轴车轮先抱死或 2211//Z F Z F B B > 前轴车轮先抱死应指出:后轴车轮先抱死是最不理想的制动情况,因为汽车将甩尾而失去操纵稳定性。
对于制动器,其制动力矩可表达为)(01111p p K T f -=)(02222p p K T f -=式中1f T ,2f T ——前、后轴车轮制动器对其车轮作用的制动力矩;1K ,2K ——常数,由制动器的参数确定;1p ,2p ——前、后轴车轮制动器的制动轮缸中的液压或制动气室中的气压;01p ,02p ——前、后轴车轮制动器使制动蹄(块)与旋转部分的制动鼓(制动盘)相接触所必需的液压或气压。
前后轮制动力分配的调节装置一、概述1.目的如本章第一节所述,最大制动力f bmax,受轮胎与地面之间附着力fψ的限制。
即:f≤fψ=gψbma x当f b一旦等于fψ后,车轮便停止转动被“抱死”,而在地面上滑拖。
制动管路中的工作压力再增大,也不可能使制动力f b增加。
车轮一旦抱死便会失去抗侧滑的能力。
如前轮抱死时,会使汽车失去方向操纵性,无法转向;如后轮抱死而前轮滚动时,会使汽车失去方向稳定性,丧失了对侧向力的抵抗能力而侧滑(甩尾),造成极为严重的恶果。
可见,后轮抱死的危险性远大于前轮。
因此,要使汽车既能得到尽可能大的制动力,又能保持行驶方向的操纵性和稳定性(不失控、不甩尾),即最佳制动状态,就必须使汽车前后轮同时达到“抱死”的边缘。
其同步条件是:前后车轮制动力之比等于前后车轮对路面垂直载荷之比。
但是,随着装载量不同和汽车制动时减速度所引起载荷的转移不同,汽车前后车轮的实际垂直载荷比是变化的。
因此,要满足最佳制动状态的条件,汽车前后轮制动力的比例也应是变化的。
2.前后轮制动管路压力分配特性曲线(1)无制动力调节装置的汽车,其前后车轮控制管路的工作压力p1、p2基本是相等的,其压力比p2/ p1永远等于1(如图20-71虚线所示)。
这就使得不论前后车轮制动器的型式、尺寸如何不同,但制动力的分配比例却永远是个常数,不可能使汽车在各种条件下都能获得最佳的制动状态。
图20-71 理想的前后轮制动管路压力分配特性曲线p1-前轮制动管路中的压力;p2-后轮制动管路中的压力;c-质心(2)理想的前后轮制动管路压力分配特性曲线如图20-71实线所示。
由于汽车满载较空载时质心c后移,p2应相应增加,故其曲线较空载曲线上移。
又因制动强度的增加(即工作压力p的增加),质心向前转移程度的增加,压力比p2/ p1应相应减小(小于1),故随压力p1的增加,曲线变得平缓。
为满足上述理想特性的要求,在一些汽车上采用了各种制动力调节装置,来调节前后车轮制动管路中的工作压力。
小客车轴间制动力分配的研究
今天,随着社会的进步,小客车被越来越多的人使用。
然而,小客车的轴间制动力的控制是一个重要的问题,一个好的制动力分配可以提高小客车的安全性。
因此,小客车轴间制动力分配的研究显得尤为重要。
首先,要了解小客车轴间制动力分配的基本原理。
小客车制动是通过牵引力将制动力从车头车轮分配到后轮,并通过分配比例调节后轮的制动力。
第一个分配比例是由轴间分配比例调节器(ADR)来控制的,它可以有效地控制后轮的制动力。
分配器的另一个作用是调节轴间制动力,以最大限度地减少滚动阻力,提高车辆的操纵性。
其次,采用ADR对轴间制动力进行控制是一种有效的分配方法。
ADR可以调节制动力以最大限度地提高制动力。
为此,在进行ADR调节时,可以帮助把轴间制动力以一种有效的分配方式分配到车轮。
然后,通过比例调节器的可调节范围,可以根据不同的路面状态和车辆条件来调节制动力的分配。
最后,小客车轴间制动力分配的调节可以使车辆更安全。
它可以有效地减少滚动阻力,并且可以适应不同的路面条件,改善车辆操纵性,提高行车安全性。
为了让小客车更安全,尤其是在复杂的路况下,应该加强小客车轴间制动力分配的研究。
总之,小客车轴间制动力分配的研究是至关重要的,它能够调节制动力,有效地改善车辆操纵性,提高行车安全性。
未来,应该加强小客车轴间制动力分配的研究,以提高小客车的安全性。
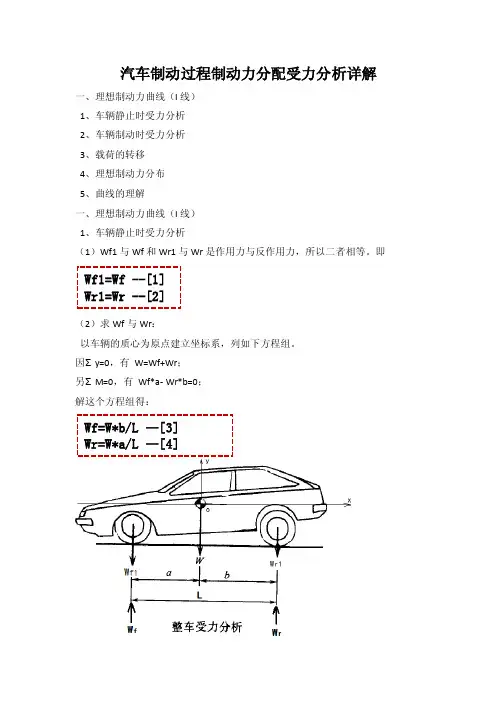
汽车制动过程制动力分配受力分析详解一、理想制动力曲线(I线)1、车辆静止时受力分析2、车辆制动时受力分析3、载荷的转移4、理想制动力分布5、曲线的理解一、理想制动力曲线(I线)1、车辆静止时受力分析(1)Wf1与Wf和Wr1与Wr是作用力与反作用力,所以二者相等。
即Wf1=Wf --[1]Wr1=Wr --[2](2)求Wf与Wr:以车辆的质心为原点建立坐标系,列如下方程组。
因Σy=0,有W=Wf+Wr;另ΣM=0,有Wf*a- Wr*b=0;解这个方程组得:Wf=W*b/L --[3]Wr=W*a/L --[4]W:车重,KgfWf1: 前轴对地面压力,KgfWr1: 后轴对地面压力,KgfWf: 地面对前轴支持力,KgfWr: 地面对后轴支持力,Kgfa:重心到前轴距离,mmb: 重心到后轴距离,mmL: 轴距,mm(2)求Wf与Wr:当然,还可以以后轮接点点为原点建立坐标系,列如下方程组。
因Σy=0,有W=Wf+Wr;另ΣM=0,有Wf*L-W*b=0;可以看出,直接用和力矩为零的方程就能求出Wf的值。
W:车重,KgfWf1: 前轴对地面压力,KgfWr1: 后轴对地面压力,KgfWf: 地面对前轴支持力,KgfWr: 地面对后轴支持力,Kgfa:重心到前轴距离,mmb: 重心到后轴距离,mmL: 轴距,mm车辆制动时受力分析(1)Wf1‘与Wf‘和Wr1‘与Wr‘是作用力与反作用力,所以二者相等。
即Wf1‘=Wf’--[5]Wr1‘=Wr‘--[6](2)求Wf‘与Wr‘:以车辆的质心为原点建立坐标系,列如下方程组。
因Σx=W*α,有B=Bf+Br=W*α因Σy=0,有W=Wf+Wr;另ΣM=0,有Wf*a-Wr*b-B*H=0;解这个方程组得:Wf‘=W*b/L+W*α*H/L --[7]Wr‘=W*a/L-W*α*H/L --[8]W:车重,KgfWf1’: 制动时前轴对地面压力,KgfWr1’: 制动时后轴对地面压力,KgfWf’: 制动时地面对前轴支持力,KgfWr’: 制动时地面对后轴支持力,Kgfa:重心到前轴距离,mmb: 重心到后轴距离,mmL: 轴距,mmH: 重心高度,mmαα: 制动减速度,gBf和Br:前、后地面制动力,KgfB: 总地面制动力,B=Bf+Br, Kgf载荷转移将公式[3]、[4]代入[7]、[8]得:Wf=W*b/L --[3]Wr=W*a/L --[4]Wf‘=W*b/L+W*α*H/L --[7]Wr‘=W*a/L-W*α*H/L --[8]Wf‘=Wf+W*α*H/L --[09]Wr‘=Wr-W*α*H/L --[10]从[09]和[10]看出,制动时前轴荷等于静态前轴荷+W*α*H/L;制动时后轴荷等于静态后轴荷-W*α*H/L;令δW= -W*α*H/L,称δW为制动时的轴荷转移。
制动力计算方法
前制动力:
制动率=(左轮制动力+右轮制动力)/[(左轮重+右轮重)*9.8]
制动率大于等于60%为合格
不平衡率=[左轮过程差最大制动力-右轮过程差最大制动力]/(两轮中最大制动力)不平衡率小于等于20%为合格
后制动力:
制动率=(左轮制动力+右轮制动力)/[(左轮重+右轮重)*9.8]
后轴制动率不做判定
当后轴制动率大于等于60%时
不平衡率=[左轮过程差最大制动力-右轮过程差最大制动力]/(两轮中最大制动力)不平衡率小于等于24%为合格
当后轴制动率小于60%时
不平衡率=[左轮过程差最大制动力-右轮过程差最大制动力]/[(左轮重+右轮重)*9.8 不平衡率小于8%为合格
手制动力:
制动率=(左轮制动力+右轮制动力)/[(前左轮重+前右轮重+后左轮重+后右轮重)*9.8] 制动率大于等于20%为合格
整车制动
制动率=(前左轮制动力+前右轮制动力+后左轮制动力+后右轮制动力)/[(前左轮重+前右轮重+后左轮重+后右轮重)*9.8]
制动率大于等于60%为合格
侧滑
大于-5小于+5为合格
车速
大于32.8小于42.1为合格
尾气
新车轻型车CO小于4.5为合格,HC小于1200为合格
新车重型车CO小于5.0为合格,HC小于2000为合格
旧车轻型车CO小于4.5为合格,HC小于900为合格
旧车重型车CO小于4.5为合格,HC小于1200为合格
灯光
两灯制新车光强大于18000为合格
两灯制旧车光强大于15000为合格
四灯制新车光强大于15000为合格
四灯制旧车光强大于12000为合格。
电动汽车制动力的分配分析及优化薛咏梅,郝彩红,鲁凤杰(长安大学汽车学院,陕西西安710064)摘要:新能源汽车中,特别是电动汽车,因其节能环保的优势,是社会和国家相关部门提倡的重点,在私人轿车中的比例也逐步增大。
因此,当今对电动车的研究也更加深入,电动汽车的制动力分配作为电动汽车安全性的主要内容,也是本文重点研究的方向。
本文主要介绍电动汽车制动力分配特点,兼顾制动力分配的制动系统能量回收以及制动力分配的相关理论曲线。
并引入实际车型,通过其实际制动力分配曲线与理想制动力分配曲线的对比来验证其制动力分配的合理性,根据对比结论分析制动力分配的特点。
并对制动力分配的优化方案进行介绍与展望。
通过整个体系的阐述,强调制动力分配的重要性以及对电动汽车制动安全性、稳定性的意义,也是电动汽车今后发展的重要方向。
为我们今后对电动汽车的研究奠定了一定的基础。
关键词:电动汽车制动;能量回收;制动力分配;分配优化The braking force of electric car distribution optimization analysisXUE Yong-Mei,HA0 Cai-Hong,LU Feng-JieSchool of automobile,Chang’an University,Xi’an,710064,ChinaAbstract: this article expounds the electric car braking force distribution optimization , chapter five written in full. Was the center of the braking energy recovery and the optimization of braking force distribution of two parts, the two parts is also a corresponding content. The first chapter focuses on the overview of the electric car braking and research background; The second chapter mainly analyzes the braking energy recovery, recycling development present situation and the main methods of recycling and how to maximize the recovery of energy; The third chapter expounds the theory of braking force distribution, the theoretical basis of this is the fourth chapter; The fourth chapter mainly studies the optimal allocation of braking force, this is the ultimate goal of our research and results; The last chapter of this article has carried on the summary and prospect of the system. In this paper, based on the research of the electric car braking, based on the theory of braking force distribution optimization analysis to its, this paper expounds the current new technology of the car care point and deficiency, and on the analysis of the study and prospect.Key words: the electric car braking energy recovery, braking force distribution, distribution optimization1绪论新世纪以来,社会发展趋势使得电动汽车成为新时期轿车的主力之一。
纯电动汽车制动力分配优化设计纯电动汽车是未来发展的趋势,其具有零排放、低噪音和高能源利用效率等优点。
在纯电动汽车的开发过程中,制动系统的设计是一个重要的方面。
制动力分配的优化设计可以提高纯电动汽车的制动性能,保证行驶安全。
制动力分配是指将来自电机和机械刹车的制动力按照一定比例分配给车轮的过程。
在纯电动汽车中,电机制动与机械刹车制动是两种主要的制动方式。
优化设计的主要目标是在保证安全的前提下,最大限度地利用电机制动,减少机械刹车的使用,提高能源利用效率。
首先,纯电动汽车制动力分配优化设计需要考虑车速和转向角对制动力分配的影响。
在制动力分配过程中,车速是一个重要的参数。
低速行驶时,电机制动力占比较大,可以充分利用电能回收,提高能源利用效率。
高速行驶时,机械刹车制动力比例逐渐增加,以保证制动效果和安全性。
此外,转向角度对制动力分配也有影响,转弯时,制动力应更多分配到车内侧的轮胎上,以增加转弯的稳定性和安全性。
其次,纯电动汽车制动力分配优化设计需要考虑车辆负载的影响。
车辆负载的变化会影响制动力的分配。
在满载条件下,制动力应更多分配到前轮上,以保证制动效果和车辆稳定性。
而在空载条件下,制动力可以适度减小,并适当增加电机制动力的比例,以便提高能源利用效率。
第三,纯电动汽车制动力分配优化设计需要考虑路面条件的影响。
不同路面条件下,制动力的分配也不同。
在干燥路面上,制动力可以适度增加,以确保制动效果和安全性。
而在湿滑路面上,制动力应适度减小,以避免车轮抱死和侧滑的风险。
第四,纯电动汽车制动力分配优化设计需要考虑车辆动力系统的特点。
电机制动的特点是能够将制动能量回收为电能,通过充电来提供车辆动力。
因此,在制动力分配设计中,应合理利用电机制动力,将制动能量回收并储存。
同时,还需要考虑电池容量和充电速率,以保证电池的寿命和性能。
最后,纯电动汽车制动力分配优化设计需要考虑驾驶员的需求和习惯。
不同驾驶员对制动力的需求和喜好有所差异。
动车组制动力分配方式研究摘要:本文采取电制动优先,空气制动补充的策略,为可能充分利用电制动,提高制动盘、制动闸片的使用寿命,减少能量消耗,提高列车经济性能。
进行了分析,希望对有关人士有所帮助。
关键词:动车组;电制动;空气制动;制动力分配策略引言制动系统是列车高速运行的安全保障,需要设计良好的控制策略来保证安全停车。
目前动车组采用的是空电复合的直通式电空制动系统,通过列车网络来传递制动控制指令和制动设备的状态,实现制动系统和列车上其他系统之间的交互。
目前制动系统的协调控制方面在现场应用时还存在一些问题,因此研究动车组电空混合制动控制算法具有重要的意义。
以动车组整车制动系统为研究对象,利用 control-build软件搭建整车制动力分配逻辑,对各种制动工况和制动方式下的车辆制动力动态分配进行分析。
由列车制动管理器根据各单元制动力能力值和载重比进行单元制动力分配,再由分段制动管理器在单元内按照等磨耗原则分配各车制动力,对电制动故障、空气制动故障、滑行以及停车情况下各车的制动力分配进行仿真分析,仿真结果表明搭建的制动力分配逻辑能够有效的提高制动效率,确保列车能够安全运行。
1、制动控制系统制动力分配策略1.1制动控制系统介绍动车组由多个功能不同的车辆组合而成,每辆车上都配备制动系统,动车上包含电制动和空气制动两种控制装置,拖车上的控制装置只有空气制动。
制动系统主要由电制动系统、空气制动系统、防滑装置和制动控制系统组成。
制动指令通过列车网络传送到每辆车的制动控制系统,电子控制单元根据速度、减速度和轮轨黏着状态确定电制动力和空气制动力的分配关系。
制动系统要完成整列车的制动需求需要各个设备按照功能划分进行协作,完成制动信息在全列车范围内的传递和执行,同时还需要与CCU、TCU等系统进行数据的交互,相关设备主要包括制动控制单元(BCU)、分段制动管理器(SBM)、列车制动管理器(TBM)、牵引控制单元(TCU)和中央控制单元(CCU)。