遮挡情况下基于粒子滤波的视觉跟踪算法研究
- 格式:pdf
- 大小:334.54 KB
- 文档页数:3
复杂环境下弱目标检测与跟踪算法研究1. 本文概述随着现代科技的发展,复杂环境下的目标检测与跟踪技术在众多领域扮演着越来越重要的角色,如智能监控、自动驾驶、军事侦察等。
在这些应用场景中,弱目标检测与跟踪,即对低对比度、小尺寸或部分遮挡目标的识别与追踪,是一项极具挑战性的任务。
本文旨在针对复杂环境下的弱目标检测与跟踪问题,提出一种新颖且高效的算法。
本文首先对现有的弱目标检测与跟踪算法进行全面的回顾与评估,分析其优缺点,并指出当前技术的瓶颈和未来发展趋势。
接着,本文将详细介绍所提出的算法,包括算法原理、实现细节以及创新点。
本文算法融合了深度学习、图像处理和多传感器数据融合等多学科知识,旨在提高复杂环境下弱目标的检测与跟踪性能。
本文将通过大量的实验验证所提算法的有效性和鲁棒性。
实验部分将包括不同场景、不同光照条件以及不同目标特性的测试,以确保算法的广泛适用性。
最终,本文将总结研究成果,讨论算法在实际应用中的潜在价值和可能面临的挑战,为复杂环境下弱目标检测与跟踪技术的发展提供新的思路和解决方案。
2. 相关工作综述在过去的几十年里,弱目标检测与跟踪在计算机视觉领域引起了广泛的关注,并且取得了显著的进展。
弱目标通常指的是在图像或视频中,由于尺寸小、对比度低、遮挡、运动模糊等原因而难以被直接观察和定位的目标。
弱目标检测与跟踪算法的研究具有重要的理论意义和实际应用价值。
在弱目标检测方面,研究者们提出了多种方法。
基于背景建模的方法通过构建背景模型来区分目标和背景,从而实现对弱目标的检测。
这类方法在处理背景复杂、目标运动不规律的场景时具有较好的效果。
基于特征学习的方法也受到了广泛关注。
通过利用深度学习等机器学习技术,提取目标的特征表示,可以提高弱目标检测的准确性和鲁棒性。
在弱目标跟踪方面,研究者们同样提出了多种算法。
基于滤波的方法,如卡尔曼滤波、粒子滤波等,通过预测目标的位置和状态,实现对弱目标的跟踪。
这类方法在处理目标运动模型已知的场景时具有较好的性能。
近年来,智能视频监控技术的研究与应用备受人们关注。
作为其基本处理部分,视频监控图像的运动目标检测是一个非常活跃的研究方向,属于计算机视觉领域的重要研究内容,在智能监控、视频压缩、自动导航、人机交互、虚拟现实等方面有着广泛的应用前景.随着计算机软硬件技术的发展,计算机技术与监控技术相结合成为了一个新兴的应用研究方向。
这种监控系统与传统意义上的监控系统的本质区别在十其智能性.视频监控的目的主要是用十对入侵者的监视、交通流量的监测,以及大门出入人员的保安监控等。
传统的监控系统大都需要人工配合进行监控,存在各种问题。
采用红外传感器等半自动的检测方法又存在对猫犬等动物产生误报警等问题.因此,对智能化的监控系统的研究就非常有必要。
简言之,不仅仅用摄像机来代替人眼简单的获取现场图像信息,应用计算机技术来协助监控人员甚至代替监控人员来完成监控任务,从而既获得良好的监控效果,又大大地减轻监控中的人力投入。
由此可见,智能监控系统有着广泛的应用前景和潜在的市场价值。
然而要使监控系统达到智能化,就必须使计算机能够从监控摄像机里所获取的视频图像序列中提取出感兴趣的目标,并对其进行目标分类和跟踪,从而达到对目标行为进行理解与描述的目的。
智能视频监控是计算机视觉领域一个新兴的应用方向和备受关注的前沿课题。
视频监控技术的发展大致经历了以下二个阶段:(1)第一代视频监控系统:早期的视频监控都是以模拟设备为主的闭路电视监控系统,称其为模拟视频监控系统。
通常采用同轴电缆的传输方式进行信号传输,但是这种模拟方式的传输要保证宽带信号具有高的信噪比和较小失真是十分困难的,所以第一代监控系统的可靠性和抗干扰性都较差,功能也相对简单。
(2)第二代视频监控系统:随着数字技术的发展,图像数据压缩编码技术及标准的改进,芯片成本的不断下降,数字视频监控系统也迅速发展起来。
人们利用计算机的高速数据处理能力进行视频采集和处理,大大提高了图像质量,增强了视频监控的能力,提高了系统的可靠性,增强其可扩展性,其功能也越来越专业化、多样化。
harp跟踪方法HARP跟踪方法HARP跟踪方法(Hierarchical Adaptive Real-time Tracking,分层自适应实时跟踪)是一种用于目标跟踪的计算机视觉算法。
它通过分层的方式,实时地跟踪目标在视频序列中的位置和形状变化。
本文将介绍HARP跟踪方法的原理和应用,并分析其优缺点。
一、原理HARP跟踪方法基于分层的思想,将目标跟踪问题分为两个层次:全局层和局部层。
全局层负责整体目标的跟踪,而局部层负责目标的细节部分跟踪。
全局层通过颜色和纹理特征对目标进行建模,并使用粒子滤波器进行跟踪。
局部层则通过局部特征(如边缘和角点)对目标进行建模,并使用卡尔曼滤波器进行跟踪。
两个层次的跟踪结果通过融合方法得到最终的目标位置和形状。
具体来说,全局层首先在视频序列的初始帧中手动选择目标,并提取目标的颜色和纹理特征。
然后,通过粒子滤波器对目标进行跟踪,不断更新目标的位置和形状信息。
局部层则在每一帧中通过边缘和角点检测算法提取目标的局部特征,并使用卡尔曼滤波器对目标进行跟踪。
最后,通过融合全局层和局部层的跟踪结果,得到最终的目标位置和形状。
二、应用HARP跟踪方法在许多领域有广泛的应用。
在视频监控领域,它可以用于实时跟踪行人、车辆等目标,帮助安全管理和犯罪侦查。
在无人驾驶领域,它可以用于实时跟踪其他车辆和行人,帮助自动驾驶系统做出正确的决策。
在虚拟现实领域,它可以用于实时跟踪用户的手部和头部动作,实现更加自然和沉浸的交互体验。
三、优缺点HARP跟踪方法具有以下优点:1. 高效性:HARP跟踪方法通过分层的方式,充分利用了全局信息和局部信息,提高了跟踪的准确性和效率。
2. 鲁棒性:HARP跟踪方法在目标形状变化、光照变化和背景干扰等情况下,仍能保持较好的跟踪效果。
3. 实时性:HARP跟踪方法采用了粒子滤波器和卡尔曼滤波器等实时算法,能够在实时视频流中进行目标跟踪。
然而,HARP跟踪方法也存在一些缺点:1. 对目标的先验知识要求较高:HARP跟踪方法需要手动选择目标,并提取目标的颜色和纹理特征,对目标的先验知识要求较高。
追踪算法原理
追踪算法是一种用于跟踪目标在连续帧图像序列中的位置的技术。
它被广泛应用于计算机视觉、图像处理和视频分析领域。
追踪算法的原理基于以下几个步骤:
1. 目标初始化:在第一帧中,通过用户输入或者其他目标检测算法,获取目标的位置和外观信息。
2. 特征提取:从目标区域中提取特征,例如颜色、纹理、形状等。
这些特征描述了目标的独特属性,用于区分目标和背景。
3. 相似度度量:通过计算当前帧中目标区域和上一帧中目标区域的相似度来判断目标的位置。
常用的相似度度量方法包括相关性滤波器、边缘匹配、颜色直方图等。
4. 目标位置预测:根据目标在前几帧中的运动轨迹,预测目标在当前帧中的位置。
可以使用一些预测模型,例如卡尔曼滤波器或粒子滤波器。
5. 目标更新:在当前帧中,更新目标的位置和外观信息,用于下一帧的追踪。
这可以通过目标检测、特征匹配、背景建模等方法来实现。
6. 追踪目标:对于后续帧,重复上述步骤,不断跟踪目标的位置。
可以使用连续多帧的信息来提高追踪的准确性和稳定性。
追踪算法的性能受到多种因素的影响,包括目标的运动模式、遮挡、光照变化、背景复杂性等。
不同的追踪算法适用于不同的场景和应用要求,例如基于特征点匹配的追踪、基于图像区域的追踪、基于深度学习的追踪等。
总结起来,追踪算法通过提取目标特征、度量相似度、预测目标位置和更新目标信息等步骤,实现目标在连续帧图像序列中的准确跟踪。
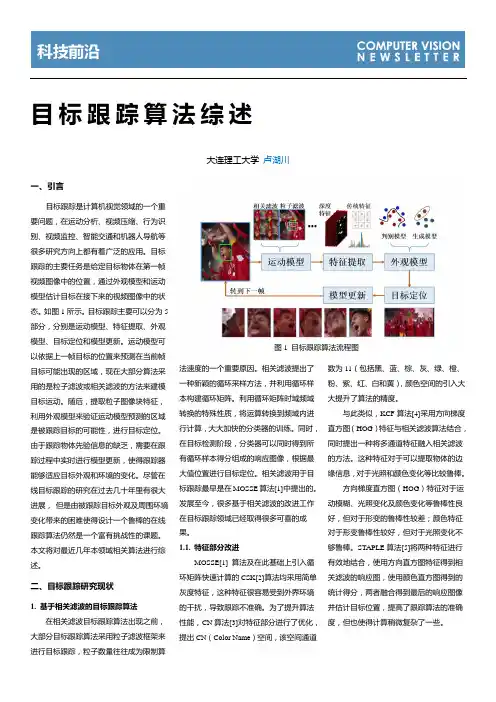
目标跟踪算法综述大连理工大学卢湖川一、引言目标跟踪是计算机视觉领域的一个重要问题,在运动分析、视频压缩、行为识别、视频监控、智能交通和机器人导航等很多研究方向上都有着广泛的应用。
目标跟踪的主要任务是给定目标物体在第一帧视频图像中的位置,通过外观模型和运动模型估计目标在接下来的视频图像中的状态。
如图1所示。
目标跟踪主要可以分为5部分,分别是运动模型、特征提取、外观模型、目标定位和模型更新。
运动模型可以依据上一帧目标的位置来预测在当前帧目标可能出现的区域,现在大部分算法采用的是粒子滤波或相关滤波的方法来建模目标运动。
随后,提取粒子图像块特征,利用外观模型来验证运动模型预测的区域是被跟踪目标的可能性,进行目标定位。
由于跟踪物体先验信息的缺乏,需要在跟踪过程中实时进行模型更新,使得跟踪器能够适应目标外观和环境的变化。
尽管在线目标跟踪的研究在过去几十年里有很大进展,但是由被跟踪目标外观及周围环境变化带来的困难使得设计一个鲁棒的在线跟踪算法仍然是一个富有挑战性的课题。
本文将对最近几年本领域相关算法进行综述。
二、目标跟踪研究现状1. 基于相关滤波的目标跟踪算法在相关滤波目标跟踪算法出现之前,大部分目标跟踪算法采用粒子滤波框架来进行目标跟踪,粒子数量往往成为限制算法速度的一个重要原因。
相关滤波提出了一种新颖的循环采样方法,并利用循环样本构建循环矩阵。
利用循环矩阵时域频域转换的特殊性质,将运算转换到频域内进行计算,大大加快的分类器的训练。
同时,在目标检测阶段,分类器可以同时得到所有循环样本得分组成的响应图像,根据最大值位置进行目标定位。
相关滤波用于目标跟踪最早是在MOSSE算法[1]中提出的。
发展至今,很多基于相关滤波的改进工作在目标跟踪领域已经取得很多可喜的成果。
1.1. 特征部分改进MOSSE[1] 算法及在此基础上引入循环矩阵快速计算的CSK[2]算法均采用简单灰度特征,这种特征很容易受到外界环境的干扰,导致跟踪不准确。
移动目标跟踪的算法研究及其应用第一部分:前言随着技术的发展和智能化的进步,移动目标跟踪的应用越来越广泛。
移动目标跟踪的核心是找到目标并跟踪它,因而算法的优劣直接决定着跟踪结果的好坏。
在本文中,我们将探讨一些常见的移动目标跟踪算法,以及它们在实际应用中的情况。
第二部分:常见的移动目标跟踪算法1. 卡尔曼滤波器算法卡尔曼滤波器是一种线性滤波器,可以用来估计系统的状态。
在移动目标跟踪中,卡尔曼滤波器的应用主要是用来估计目标的轨迹和速度等状态参数。
卡尔曼滤波器算法具有简单、实用、鲁棒性强的特点,在很多应用中得到了广泛的应用。
2. 粒子滤波器算法粒子滤波器算法是一种非参数滤波器,与卡尔曼滤波器相比具有更好的适应性和精度。
在移动目标跟踪中,粒子滤波器算法用来估计目标的状态,可以有效地解决一些卡尔曼滤波器无法解决的问题,如非线性系统和非高斯噪声。
3. CAMShift算法CAMShift算法是一种基于颜色直方图的目标跟踪算法,它的核心思想是通过更新目标直方图的方式来实现目标跟踪。
CAMShift算法具有实时性好、可靠性高、鲁棒性强等特点,在很多应用场景中得到了广泛的应用。
第三部分:移动目标跟踪算法的应用1. 智能监控移动目标跟踪算法在智能监控领域有广泛的应用。
通过对监控视频中的移动目标进行跟踪,可以实现对物品的自动识别、实时监控、监控报警等功能,提高监控系统的安全性和智能化程度。
2. 交通管控移动目标跟踪算法在交通管控领域同样有着广泛的应用。
通过对交通视频中的车辆进行跟踪,可以实现对交通流量、拥堵等情况的实时统计,帮助交通部门进行交通治理,提高道路的通行效率和安全性。
3. 智能机器人移动目标跟踪算法在智能机器人领域也有很大的应用潜力。
通过对机器人视觉信息的处理,可以实现机器人的导航、目标抓取、环境识别等功能,为机器人的智能化发展打下基础。
第四部分:总结总的来说,移动目标跟踪算法是计算机视觉领域中的重要研究方向之一,也是实际应用中必不可少的一种算法。
基于粒子滤波和仿射变换的鱼目标跟踪算法侯崇明;袁广林;王健【摘要】针对鱼目标跟踪,提出了一种基于粒子滤波与仿射变换的算法。
该算法引入仿射变换来建立鱼姿态变化的形状空间,同时用粒子滤波在鱼姿态变化的形状空间内进行搜索,求解鱼姿态变化的参教,然后对鱼目标进行跟踪。
运用鱼的运动模型进行了实验,结果显示所提算法的跟踪轮廓在正确跟踪目标的基础上,能够对目标的形状进行更加形象的描述,较好地解决了目标在颜色上出现干扰的问题,从而有效地解决了鱼在水中游动时产生的平面旋转及短暂遮挡的问题。
%A new fish tracking algorithm has been developed based on affine transform and particle filtering. Affine transformation is intro-duced to build the fish shape space,and particle-filtering is used to search in the space in order to solve the parameters of fish shape change,and finally to track targeted fish. Experiments were conducted with the guidance of fish kinetics,and the results show that the pro-posed algorithm can track the targeted fish and better describe the shape of fish,and as a result,can solve the problems of in-plane rota-tion and short-time hiding.【期刊名称】《计算机技术与发展》【年(卷),期】2014(000)004【总页数】4页(P135-138)【关键词】鱼目标;仿射变换;粒子滤波;跟踪算法【作者】侯崇明;袁广林;王健【作者单位】陆军军官学院十一系,安徽合肥 230031;陆军军官学院十一系,安徽合肥 230031;陆军军官学院十一系,安徽合肥 230031【正文语种】中文【中图分类】TP391鱼类作为水中的主要动物,它们的生活习性不仅能够对水环境产生影响而且作为大自然中重要的一环它们对人类的生存也有着重大的影响,这使得鱼类无论在民用还是军用方面都存在研究的价值。
新型粒子滤波算法及其在纯方位目标跟踪中的应用作者:王法胜张应博来源:《计算机应用》2010年第01期摘要:针对基本粒子滤波算法没有融合当前时刻观测值的缺点,提出了一种卡尔曼粒子滤波算法。
该算法针对每一个粒子使用卡尔曼滤波器进行更新,在更新过程中融合最新的观测信息,提高粒子滤波器的估计精度。
针对纯方位目标跟踪问题进行实验,与基本粒子滤波算法及卡尔曼滤波进行了对比。
实验结果表明,卡尔曼粒子滤波算法的跟踪性能明显优于其他两种算法。
关键词:卡尔曼滤波器;粒子滤波;目标运动分析;线性跟踪系统中图分类号: TP39文献标志码:ANovel particle filtering algorithm with application to bearingonly trackingWANG Fasheng1, ZHANG Yingbo21. Department of Computer Science and Technology, Dalian Neusoft Institute of Information,2. City Institute, Dalian University of Technology, Dalian Liaoning 116600, China)Abstract: The conventional bootstrap filter suffers a main drawback of not incorporating the latest observations. Therefore, this paper proposed a Kalman Particle Filter (KPF) algorithm, and applied this new algorithm to bearingonly target tracking. An improved scheme was presented to handle this problem and yield a Kalman particle filter. The underlying idea of the new algorithm is that each particle is updated using Kalman filter incorporating the coming observations. A bearingonly tracking model was experimented and compared with bootstrap filter and KPF. The experimental results verify its superiority.Key words: Kalman filter; particle filtering;target motion analysis; linear tracking system0 引言纯方位目标跟踪(BearingOnly Tracking, BOT)在许多领域尤其是军事领域中(航空、航海、水下)具有非常广泛的应用[1]。
机器人视觉系统中的运动目标跟踪技术研究随着机器人技术的不断发展,机器人视觉系统在很多领域得到了广泛的应用。
其中,机器人运动目标跟踪技术是一个重要的研究领域。
本文将着重探讨机器人视觉系统中的运动目标跟踪技术的研究现状及其未来发展趋势。
一、什么是机器人运动目标跟踪技术?机器人运动目标跟踪技术是指利用机器视觉技术来获取目标物体的特征并实时跟踪其运动状态的技术。
这项技术可以被应用于机器人的各个方面,通常分为两个主要步骤:目标检测和目标跟踪。
首先需要通过目标检测算法识别出图像中的目标物体并标定其位置和大小,然后通过目标跟踪算法对目标物体进行跟踪,以便机器人能够高效准确地跟踪目标物体的运动轨迹。
二、机器人运动目标跟踪技术的研究现状在机器人视觉系统中,目标跟踪技术是非常重要的组成部分。
当前机器人视觉系统中的目标跟踪技术有很多种,其中常用的算法包括卡尔曼滤波算法、粒子滤波算法、支持向量机算法、深度学习算法等。
1.卡尔曼滤波算法卡尔曼滤波算法是运动目标跟踪中常用的算法之一,它通过对目标物体的位置、速度等状态信息进行预测和修正,从而实现目标跟踪。
使用卡尔曼滤波算法进行运动目标跟踪时,需要先建立模型,然后根据观测数据不断修正模型,最终得到目标物体的运动状态。
2.粒子滤波算法粒子滤波算法是一种基于Monte Carlo方法的非线性滤波算法,它可以对目标物体的运动状态进行推断。
该算法的主要思想是通过多个粒子对目标物体进行描述和估计,从而实现目标跟踪。
3.支持向量机算法支持向量机算法是一种常用的机器学习算法,它可以对目标物体进行分类和识别,以实现目标跟踪。
该算法的主要思想是通过训练数据建立分类模型,然后使用该模型对目标物体进行跟踪。
4.深度学习算法深度学习算法是一种新型的机器学习方法,它可以通过大量的数据训练神经网络模型,从而实现对目标物体的识别和跟踪。
不同于传统算法,使用深度学习算法进行运动目标跟踪时,无需手动提取特征,而是通过训练数据自动提取特征,然后使用这些特征进行目标跟踪。
基于粒子滤波算法的目标跟踪及遮挡处理算法1.1引言对运动目标物的跟踪也是视觉监控系统中的基础算法之一。
目标跟踪的任务是通过对图像序列的处理,准确估计出感兴趣目标物在每个时刻的运动参数,包括位置、大小、速度、加速度以及运动轨迹等,为行为理解等更高层的任务打下基础。
本章首先概述目标跟踪算法的基本步骤和难点,并对现有算法作分类简介;然后对实现鲁棒跟踪所必需的工具——在线贝叶斯估计算法作详细介绍;在此基础上详细论述本文使用的跟踪方法,该方法将已有的多种先进算法有机结合,使计算量显著降低,鲁棒性增强;最后对提出的算法进行总结和分析。
1.2 目标跟踪算法概述目标跟踪算法主要由两个部分组成:(1)目标物表示;(2)运动状态估计。
下面对它们分别介绍。
1.2.1目标物表示目标物表示的核心在于特征的选择和提取,即用什么特征来描述和表示感兴趣目标物。
一个好的目标物表示方法应该能够将被跟踪的目标物和背景中的物体以及其它物体区别开来,这正是目标物表示的难点所在。
运动目标物所在的环境通常是很杂乱的,其中存在许多与目标物有相似特征的物体。
例如:房间内的窗帘、家具等往往与人的皮肤颜色相近;当监控视野中存在多个行人的时候,跟踪器容易将目标行人与其他行人相混淆。
下面介绍几种常用的特征。
1.2.1.1颜色特征颜色是人类辨识物体的重要特征,也是视觉跟踪中最常用的特征之一。
颜色特征通常是在一块区域中提取出来的,因此它具有对目标平面旋转、非刚性形变、远离或靠近镜头的尺度变化以及部分遮挡等情形较为鲁棒的优点。
另外,由于图像直接由一个个像素的颜色值所表示,因此颜色特征还具有容易提取、计算简单的优点。
最常用的颜色特征是颜色直方图。
Comaniciu等人提出了基于颜色直方图的跟踪算法[1][2]。
在他们的方法中,颜色直方图受到了核函数的空间加权。
这样区域内中心附近的像素对颜色直方图有更大的贡献,使跟踪更加精确,因为区域边缘的像素可能来自背景或其它物体,其可信度较低。