机器人现场编程川崎机器人AS系统与语言PPT课件
- 格式:pptx
- 大小:590.77 KB
- 文档页数:8




川崎机器人示教器的界面及
基本操作
亠7
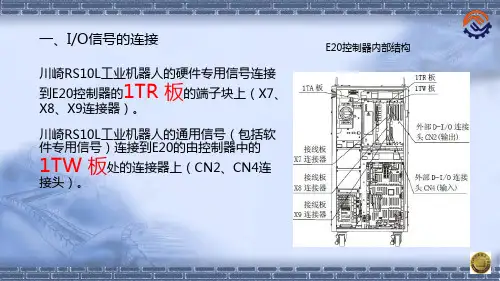
—、川崎RS10L机器人示教器
机器人示教器是进行人机交互的主要设备,主要功能包括:机器人手动操作、示教编程、参数设置、机器人状态的显示等等。
示教器的放置
三、示教器上的开关
握杆触发开黨
»各轴电机上电
>手动速度调节
亠坐标系/插补方式切换“登录”
键
“上档”键
(功能同电脑“SHIFT”
键)
■入
IME
运转/暂停键W
E E
EE
sQZ
J
“轴"键
五、示教器上的硬件键
光标键
六、示教器的触摸屏
示教HOL
D
UM
1
0A区主要为一些触韓作键和显示区域;
B区为程序显示区域;
J/E
IK
R1UI
ggg岀
C区为F键(Function/功
能)区域(用于显示或监控
机器人的工作状态)。
七、示教器的手持方法
八、示教器握杆触发开关的操作
此开关为有效开关,分为〃完全释放"、〃适度握下"以及〃完全握到底"三种状态。
■ ”适度握下”此开关,机器人会各轴会发出"哒"的声音,这是各轴马达抱闸松开的声音,此时才允许手动操作机器人各轴;
如果握杆触发开关”完全握到底”,或者”完全釋放”时,马达电源将被切断,机器人将停止动作。
八、示教器握杆触发开关的操作
适度握下握杆重握到底握杆
完全释放握杆
The End !。