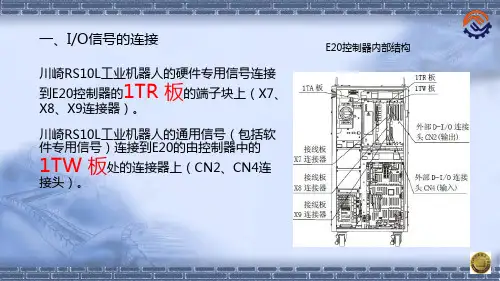
机器人现场编程-川崎机器人IO信号的连接
- 格式:pptx
- 大小:585.43 KB
- 文档页数:18
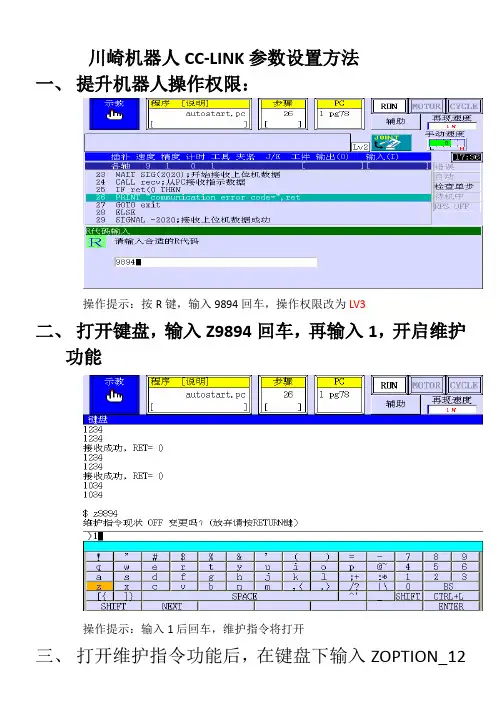
川崎机器人CC-LINK参数设置方法
一、提升机器人操作权限:
操作提示:按R键,输入9894回车,操作权限改为LV3
二、打开键盘,输入Z9894回车,再输入1,开启维护
功能
操作提示:输入1后回车,维护指令将打开
三、打开维护指令功能后,在键盘下输入ZOPTION_12
回车,按提示菜单将现场总线通信功能打开(下图第二项)
四、输入R代码060805,进入辅助功能之CC-LINK现
场网络参数设置:
操作提示:也可点击辅助—输入/输出信号—信号配置设定—CC-LINK参数设
定,一步一步进入子菜单进行参数设定
4.1 通用参数设定
4.2站数据设定:
操作提示:
我们统一规定将站数据设定为:站类型1 Ver. 2.0; 站类型2 智能设备扩展循环:4倍,占有站数:4站
4.3远程登陆数设定:
远程登录数(主从口)均设定为64
五、其它I/O物理接口分配(默认)
六、信号列顺序设定(默认)
八:其它测试数据记录:
1、经现场实测得到:当站数据设定为:Ver. 2.0, 4局4站时,每台智能设备
占用448点(BIT位),其中前256位可与主站(PLC)一一对应,256位之后暂
不能对应上(有待验证);
2、硬件上CC-LINK板卡上S2第三位拔码开关拔到1,表示4局4站;
3、站地址设定开关为10进制数字设定;
4、CC-LINK插头接线:DA、DB、DG颜色各站一一对应,FG接屏蔽线,DA,DB之间在第一个站和最后一个站时需连接一只110欧的终端电阻。
川崎机器人操作说明目录示教器主界面 (2)如何在接口面板和程序窗口之间切换 (5)接口面板有几页,如何翻页 (6)如何切换手动模式和自动模式 (6)如何手动移动机器人 (7)如何示教位置 (8)如何将机器人移动至抓取点或已示教的点 (12)如何查看机器人输入输出IO状态 (13)如何手动控制抓手打开合上 (14)示教器主界面示教器界面分两种,一种是显示接口面板如下图所示:一种是显示程序,如下图所示:按下机器人键,可以在接口面板和程序之间切换。
下面对机器人界面做个介绍显示机器人处于手动模式(示教),还是自动模式(再线)。
显示当前正在执行的前台程序。
显示当前正在执行的后台程序。
运转/暂停机器人,当机器人停止时,显示hold ,当机器人正在运行时,显示RUN打开/切断马达电源,灰色表示电源关闭。
启动循环操作,当为绿色时,正在循环执行程序。
机器人当前坐标系,点击它可以切换坐标系。
这个很重要,如果机器人不运行,检测是否设置为步骤连续,再现连续。
操作接口面板有些按钮,需要切换到许可。
这个是接口面板,上面有一些操作按钮,右右上角可以看到,这个一共有8页,当前处于第一页。
自动运行的速度,手动运行的速度,点击它,可以设定速度。
程序窗口如何在接口面板和程序窗口之间切换按下CC键,即可切换。
接口面板有几页,如何翻页1/8 表示一共有8页,当前处于第一页翻页请先按下“A”键,再按“上下”键。
如何切换手动模式和自动模式切换手动模式吧下面图中开关都拧到手状态,即为手动模式。
反之,则为自动模式。
这个开关在示教器上这个开关在控制柜上如何手动移动机器人首先,将机器人切换到手动状态下点击此按钮调整一下手动移动的速度(刚开始不熟悉的情况下,调成2或3)。
点此按钮切换坐标系,可以使用base坐标系,和joint坐标系,不要使用tool坐标系。
将RUN 和MOTOR 点亮(点亮的方法为:按住A键,再点击此图标即可)。
Cycle 不用点亮(实际上,只有自动才能点亮)按下背面的使能开关再按下轴移动键如何示教位置第一步,点击当前程序窗口按下键,点击列表。

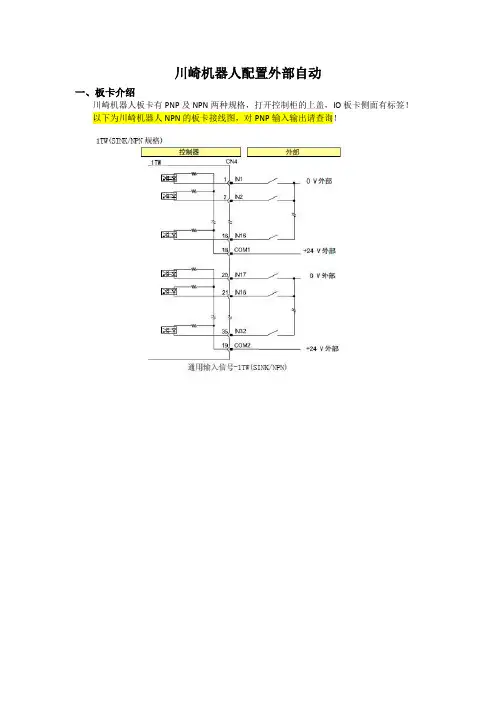
川崎机器人配置外部自动
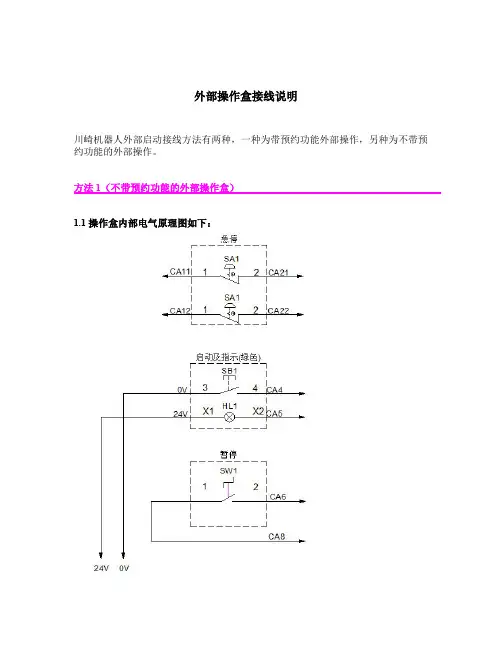
一、板卡介绍
川崎机器人板卡有PNP及NPN两种规格,打开控制柜的上盖,IO板卡侧面有标签!
以下为川崎机器人NPN的板卡接线图,对PNP输入输出请查询!
二、接线注意事项
1、需要外供24V电源!
2、输入信号18针脚为外供24V,1-16为外供输入0V,19针脚为外供24V,20-35针脚为外供0V(18为1-16的公共端,19为20-35的公共端)
3、同样输出信号按照接线图接输出信号即可!
4、多次确认无误再开机,进行IO测试!
三、川崎机器人最高权限为R9894
最高权限可以打开部分隐藏的功能。
四、选择辅助—输入/输出—专用输入信号
1、对外部马达电源ON、外部故障复位、外部循环启动、外部停止(EXT_IT)分别定
义信号;
2、定义信号后,A+左右按键,使其专用打钩确认;
3、外部停止(EXT_IT)为常闭信号,相当于暂停旋钮,当无此信号机器人处于暂停状
态;
五、运行程序
1、程序选择主程序,光标选中主程序第一行;
2、示教器及控制柜的钥匙打成自动;
3、确定好外部自动的速度,选择步骤连续,周期连续!
4、先给外部马达电源ON(脉冲)
5、外部故障复位(脉冲)
6、外部循环启动(脉冲)
7、机器人即运动起来!。
机器人现场编程-川崎机器人AS系统与语言机器人现场编程川崎机器人 AS 系统与语言在当今高度自动化的工业生产领域,机器人的应用日益广泛。
机器人现场编程作为机器人应用中的关键环节,对于提高生产效率、保证产品质量具有重要意义。
川崎机器人以其出色的性能和先进的技术在行业中占据了一席之地,而其 AS 系统与语言则为机器人的编程操作提供了强大的支持。
川崎机器人的 AS 系统是一个功能强大、易于使用的编程平台。
它具有直观的用户界面,使得编程人员能够快速上手,即使是对于没有丰富编程经验的人员来说,也能在较短的时间内掌握基本的操作。
通过 AS 系统,编程人员可以对机器人的运动轨迹、动作顺序、速度等参数进行精确的设定,以满足不同生产任务的需求。
在 AS 系统中,川崎机器人所使用的编程语言具有清晰的语法结构和丰富的指令集。
这种编程语言类似于常见的高级编程语言,如 C++或 Python,但又针对机器人控制的特点进行了优化和简化。
编程人员可以通过编写代码来实现各种复杂的机器人动作,例如直线运动、圆弧运动、关节运动等。
同时,还可以设置机器人的等待时间、输入输出信号的处理等,以实现与外部设备的协同工作。
为了更好地理解川崎机器人 AS 系统与语言的编程过程,我们以一个简单的搬运任务为例。
假设需要机器人将一个工件从 A 点搬运到 B点,首先,编程人员需要使用 AS 系统中的指令来定义机器人的起始位置和目标位置。
然后,通过设置运动速度和加速度等参数,确保机器人能够平稳、快速地完成搬运动作。
在这个过程中,还需要考虑机器人与周围环境的碰撞检测以及与其他设备的通信交互。
在实际的编程中,编程人员还需要充分考虑机器人的工作空间、负载能力以及精度要求等因素。
川崎机器人的 AS 系统提供了丰富的工具和功能,帮助编程人员进行这些参数的分析和优化。
例如,通过模拟功能,编程人员可以在虚拟环境中对编写的程序进行测试和验证,提前发现可能存在的问题并进行调整,从而减少在实际生产中的错误和停机时间。
川崎机器人程序编辑与运行嘿,朋友们!今天咱们来聊聊川崎机器人程序编辑与运行这回事儿。
先说说我之前碰到的一件有意思的事儿吧。
有一次,我去一个工厂参观,正好看到工人们在调试川崎机器人。
那场面,真叫一个热闹!只见那机器人灵活地伸展着手臂,就像一个舞者在尽情展示自己的舞姿。
咱们言归正传,川崎机器人程序编辑可不是一件简单的事儿。
这就好比给机器人的大脑编写一套独特的“语言”,让它能明白我们想要它干啥。
在编辑程序的时候,首先得清楚咱们的需求。
比如说,是让机器人进行物料搬运,还是精准的组装操作?这就像是决定要让一个运动员参加跑步比赛还是跳远比赛一样,目标不同,训练方式也就不一样。
然后就是具体的编程环节啦。
这里面的指令就像是给机器人下达的一道道“命令”,得准确无误,不然机器人可就“迷糊”了。
比如说,告诉它移动的速度、方向、距离等等,每一个参数都得精心设置。
编程过程中,还得考虑到各种可能出现的情况。
就像咱们出门得看天气预报,准备好应对不同的天气一样。
机器人在工作中也可能遇到障碍物、突发故障等等,所以程序里得有相应的应对策略。
当程序编辑好之后,接下来就是激动人心的运行环节了。
这就像是一场精心准备的演出,终于要拉开帷幕。
在运行之前,可得好好检查一遍,确保没有疏漏。
就像考试前要检查文具是否带齐一样。
然后,按下启动按钮,眼睛紧紧盯着机器人的动作。
如果一切顺利,机器人会按照预定的程序,完美地完成任务。
那感觉,就像是看到自己精心培育的花朵终于绽放,满满的成就感。
但要是出现了问题,那也别慌,赶紧查找原因,修改程序。
比如说有一次,一个机器人在搬运货物的时候,动作突然变得不流畅了。
大家赶紧停下来,一番检查后发现,原来是程序里的一个速度参数设置得不太合理。
经过调整,机器人又恢复了正常工作。
总的来说,川崎机器人程序编辑与运行是一个既充满挑战又充满乐趣的过程。
它需要我们的耐心、细心和智慧。
朋友们,想象一下,未来的世界里,川崎机器人在各个领域大显身手,而这背后,都离不开我们对程序编辑与运行的精心把控。